


A Novel Method for Predicting the Behavior of a Sucker Rod Pumping Unit Based on the Polished Rod Velocity

Abstract
:1. Introduction
2. Mathematical Problem
2.1. One-Dimensional Sucker Rod String Wave Equation
2.2. Traditional Normal Pumping Conditions
2.3. Analytical Solution of the One-Dimensional Sucker Rod String Wave Equation
3. Approach to the Problem Solution
3.1. Model of Normal Pumping Conditions
3.2. Iterative Algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm 1: Prediction algorithm with iteration | |
| Input: np, K, and a series system parameter | |
| Calculate: ci, pd, ps, W0, ks, kt, T (i.e., 60/np), ω, and vi | |
| Set: J = 400, t = linspace(0, T, J + 1), N = J/2 | |
| Calculate: ua(t) according to kinematic equation of pumping unit’s movement | |
| Approximated by Fourier series with trpaz function: ua(t)→ν0, νn, and δn refer to Equation (4) | |
 | |
| Output: ua0(t), PRL(t), up0(t), Pp0(t) | |
3.3. Theoretical Analysis of the Prediction Algorithm
3.3.1. Theoretical Basis
3.3.2. Results of the Iterative Process
3.3.3. Convergence of Iterations
4. Results and Discussion
4.1. Validation Study
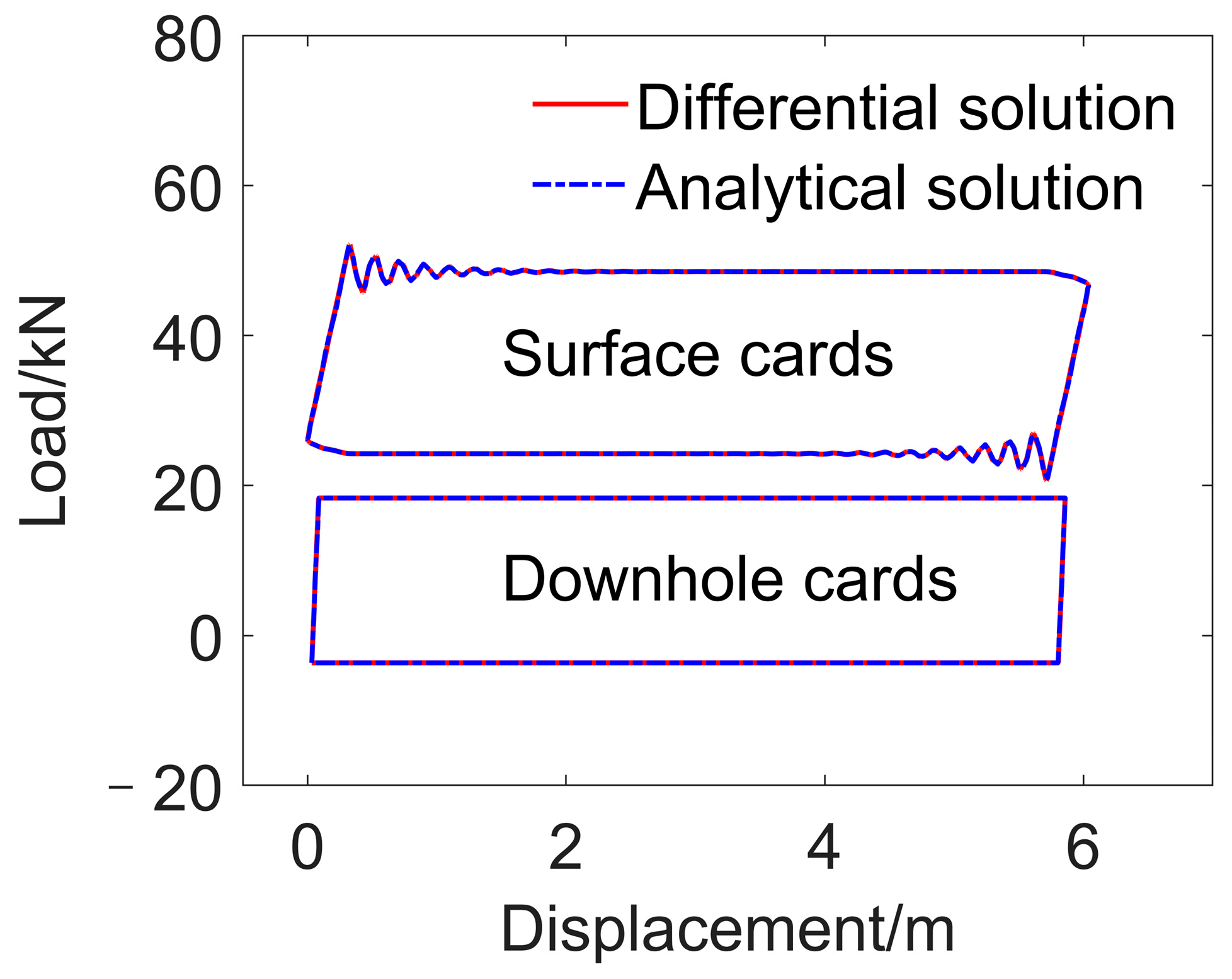
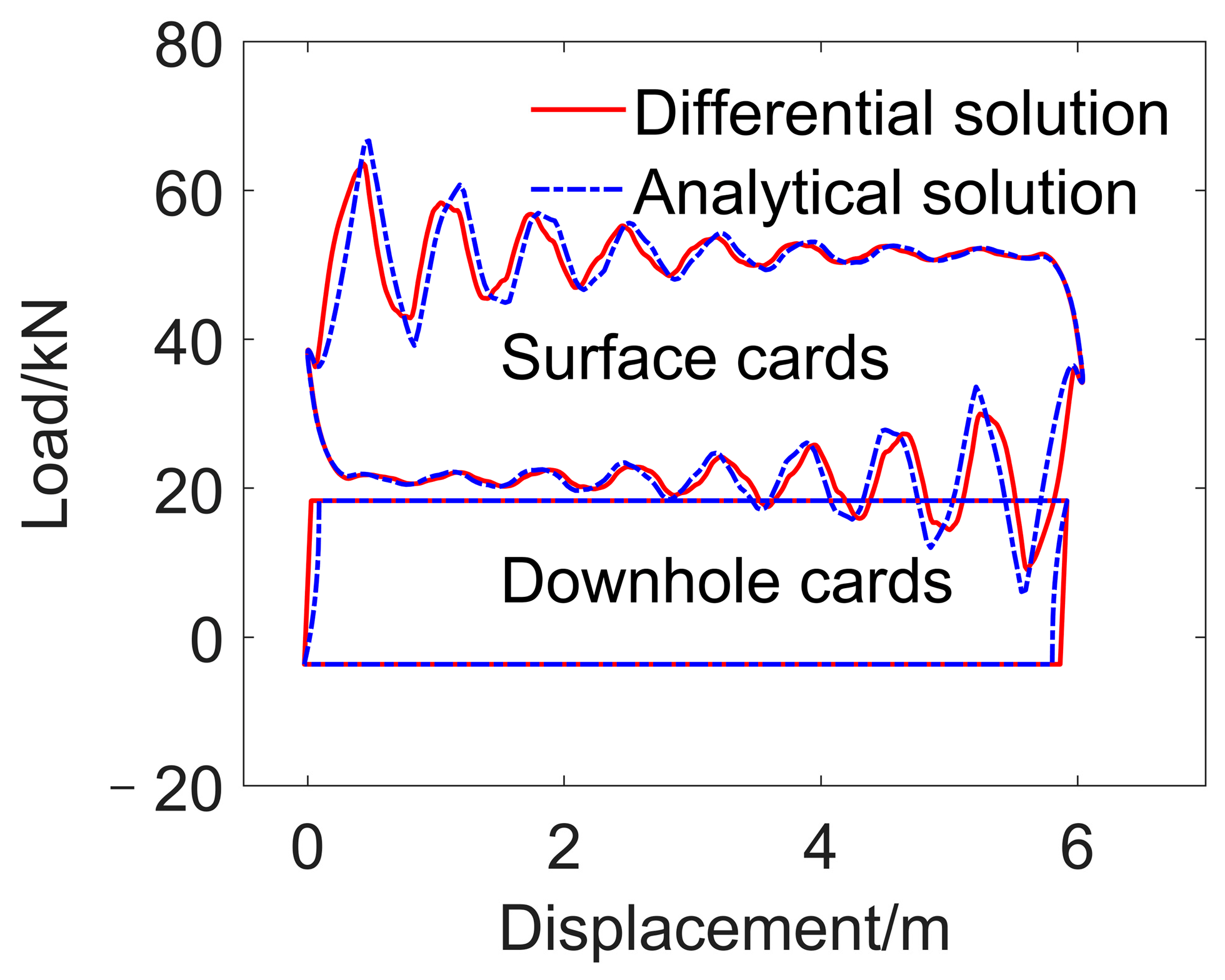
4.1.1. Comparison with the Finite Differential Solution
4.1.2. Comparison with the Measured Card
4.2. Convergence Study
5. Conclusions
- (1)
- In the normal pump condition model, the recursive equation for pump pressure is based on the polished rod velocity, which can easily provide the pump load–time function within one pumping cycle, naturally consider the anchoring state of the tubing, and include other fault conditions.
- (2)
- The algorithm can use the analytical solution of the wave equation to predict the behavior of the pumping unit only based on the polished rod velocity. Comparison with the simulated cards of the classical finite difference method shows that the maximum area relative error is 0.10%, and the proposed algorithm can achieve the same level of accuracy as the classical finite difference method. When compared with the measured surface cards, the area relative error is 1.45%, indicating that the algorithm is feasible.
- (3)
- The convergence of the algorithm is analyzed theoretically. An expression for the iteration matrix is given, which can be applied to both single rod and multi-tapered rods. The expression shows that the convergence of the algorithm depends on the material of the rod, its length, the fluid viscosity, and the tube anchoring state. Numerical results show that the algorithm converges in the two wells given in this paper. The smaller the maximum value of the iterative matrix elements, the easier it is for the algorithm to converge. The convergence analysis provides assurance of the accuracy and reliability of the algorithm.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Takacs, G. A critical analysis of power conditions in sucker-rod pumping systems. J. Petrol. Sci. Eng. 2022, 210, 110061. [Google Scholar] [CrossRef]
- Ramos, A.J.A.; Almeida Júnior, D.S.; Santos, A.R.; Araújo, E.A.; Aum, P.T. Energy dissipation analysis of oil wells sucker rod string. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 108. [Google Scholar] [CrossRef]
- Langbauer, C.; Langbauer, T.; Fruhwirth, R.; Mastobaev, B. Sucker rod pump frequency-elastic drive mode development–from the numerical model to the field test. Liq. Gas. Energy Resour. 2021, 1, 64–85. [Google Scholar] [CrossRef]
- Bangert, P. Diagnosing and Predicting Problems with Rod Pumps using Machine Learning. In Proceedings of the SPE Middle East Oil and Gas Show and Conference, Manama, Bahrain, 18–21 March 2019. [Google Scholar] [CrossRef]
- Wang, X.; He, Y.; Li, F.; Dou, X.; Wang, Z.; Xu, H.; Fu, L. A Working Condition Diagnosis Model of Sucker Rod Pumping Wells Based on Big Data Deep Learning. In Proceedings of the International Petroleum Technology Conference, Beijing, China, 26–28 March 2019. [Google Scholar] [CrossRef]
- Xu, J. A Method for Diagnosing the Performance of Sucker Rod String in Straight Inclined Wells. In Proceedings of the SPE Latin America/Caribbean Petroleum Engineering Conference, Buenos Aires, Argentina, 27–29 April 1994. [Google Scholar] [CrossRef]
- Zheng, B.; Gao, X. Sucker rod pumping diagnosis using valve working displacement and parameter optimal continuous hidden Markov model. J. Process Cont. 2017, 59, 1–12. [Google Scholar] [CrossRef]
- Zheng, B.; Guo, X.; Ki, X. Diagnosis of Sucker Rod Pump based on generating dynamometer cards. J. Process Cont. 2019, 77, 76–88. [Google Scholar] [CrossRef]
- Zhang, A.; Gao, X. Supervised dictionary-based transfer subspace learning and applications for fault diagnosis of sucker rod pumping systems. Neurocomputing 2019, 338, 293–306. [Google Scholar] [CrossRef]
- He, Y.; Zang, C.; Zeng, P.; Wang, M.; Wan, G.; Dong, Q. Automatic Recognition of Sucker-Rod Pumping System Working Conditions Using Few-Shot Indicator Diagram Based on Meta-learning. In Proceedings of the International Conference on Intelligent Automation and Soft Computing, Chicago, IL, USA, 26–28 May 2021. [Google Scholar] [CrossRef]
- Han, Y.; Li, K.; Ge, F.; Xu, W. Online fault diagnosis for sucker rod pumping well by optimized density peak clustering. ISA Trans. 2022, 120, 222–234. [Google Scholar] [CrossRef] [PubMed]
- Takacs, G. Calculation of Operational Parameters. In Sucker-Rod Pumping Handbook: Production Engineering Fundamentals and Long-Stroke Rod Pumping; Gulf Professional Publishing: Houston, TX, USA, 2015; Chapter 4; pp. 247–376. [Google Scholar] [CrossRef]
- Moreno, G.A.; Garriz, A.E. Sucker rod string dynamics in deviated wells. J. Petrol. Sci. Eng. 2019, 184, 106534. [Google Scholar] [CrossRef]
- Gibbs, S.G. Predicting the behavior of sucker-rod pumping systems. SPE J. 1963, 15, 769–778. [Google Scholar] [CrossRef]
- Doty, D.R.; Schmidt, Z. An Improved Model for Sucker Rod Pumping. SPE J. 1983, 23, 1. [Google Scholar] [CrossRef]
- Lekia, S.D.L.; Evans, R.D. A Coupled Rod and Fluid Dynamic Model for Predicting the Behavior of Sucker-Rod Pumping Systems. SPE Prod. Fac. 1995, 10, 26–33. [Google Scholar] [CrossRef]
- Yu, G.A.; Wu, Y.J.; Wang, G.Y. Three dimensional vibration in a sucker rod beam pumping system. Acta Petrolei Sin. 1989, 10, 76–83. (In Chinese) [Google Scholar] [CrossRef]
- Lollback, P.A.; Wang, G.Y.; Rahman, S.S. An alternative approach to the analysis of sucker-rod dynamics in vertical and deviated wells. J. Pet. Sci. Eng. 1997, 17, 313–320. [Google Scholar] [CrossRef]
- Khodabandeh, A.; Miska, S. A Simple Method for Predicting the Performance of a Sucker-Rod Pumping System. In Proceedings of the SPE Eastern Regional Meeting, Lexington, KY, USA, 22–25 October 1991. [Google Scholar] [CrossRef]
- Khodabandeh, A.; Miska, S. A New Approach for Modeling Fluid Inertia Effects on Sucker-Rod Pump Performance and Design. In Proceedings of the SPE Rocky Mountain Regional Meeting, Casper, WY, USA, 18–21 May 1992. [Google Scholar] [CrossRef]
- Xing, M.; Dong, S. An improved longitudinal vibration model and dynamic characteristic of sucker rod string. J. Vibroeng. 2014, 16, 3432–3448. [Google Scholar]
- Xing, M. Response analysis of longitudinal vibration of sucker rod string considering rod buckling. Adv. Eng. Softw. 2016, 99, 49–58. [Google Scholar] [CrossRef]
- Li, W.; Dong, S.; Sun, X. An Improved Sucker Rod Pumping System Model and Swabbing Parameters Optimized Design. Math. Probl. Eng. 2018, 2018, 4746210. [Google Scholar] [CrossRef]
- Lv, X.; Wang, H.; Liu, Y.; Chen, S.; Lan, W.; Sun, B. A novel method of output metering with dynamometer card for SRPS under fault condition. J. Pet. Sci. Eng. 2020, 192, 107098. [Google Scholar] [CrossRef]
- Schafer, D.J.; Jennings, J.W. An investigation of analytical and numerical sucker rod pumping mathematical models. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dallas, TX, USA, 24 September 1987. [Google Scholar] [CrossRef]
- Yin, J.; Sun, D.; Yang, Y. Predicting multi-tapered sucker-rod pumping systems with the analytical solution. J. Pet. Sci. Eng. 2021, 197, 108115. [Google Scholar] [CrossRef]
- Yin, J.; Sun, D.; Yang, Y. A Novel Method for Diagnosis of Sucker-Rod Pumping Systems Based on the Polished-Rod Load Vibration in Vertical Wells. SPE J. 2020, 25, 2470–2481. [Google Scholar] [CrossRef]
- Takacs, G. The Analysis of Sucker-Rod Pumping Installations. In Sucker-Rod Pumping Handbook: Production Engineering Fundamentals and Long-Stroke Rod Pumping; Gulf Professional Publishing: Houston, TX, USA, 2015; Chapter 6; pp. 423–503. [Google Scholar] [CrossRef]
- DaCunha, J.J.; Gibbs, S.G. Modeling a Finite-Length Sucker Rod Using the Semi-Infinite-Wave Equation and a Proof to Gibbs’ Conjecture. Soc. Petrol. Eng. 2009, 14, 112–119. [Google Scholar] [CrossRef]
- Gibb, S.G. Method of Determining Sucker Rod Pump Performance. U.S. Patent 3343409, 26 September 1967. [Google Scholar]











| Items | Values | Values |
|---|---|---|
| Pumping unit | Long-stroke pumping unit (Rotaflex) | Beam pumping unit (CYJ14-4.8-73HB) |
| Pump stroke, m | 6.0 | 4.2 |
| Pumping speed, min−1 | 1.4 | 4.1 |
| Sucker rod string, mm×m | 25 × 372.5 + 22 × 518.2 | 22 × 986.2 |
| Tubing string, mm×m | 76 × 856.7, unanchored | 62 × 980.6, unanchored |
| Pump diameter, mm | 63 | 57 |
| Pump depth, m | 900.6 | 997.3 |
| Fluid density, kg/m3 | 998.46 | 990.30 |
| Dynamic liquid level, m | 629 | 579 |
| Oil pressure, MPa | 0.9 | 0.1 |
| Casing pressure, MPa | 0 | 0 |
| Fluid viscosity, mPa.s | 800 | 747.5 |
| Gas/oil ratio, m3/m3 | 0 | 0 |
| Rod and tube’s density, kg/m3 | 7850 (Steel) | 7850 (Steel) |
| Rod and tube’s Young’s modulus, GPa | 210 (Steel) | 210 (Steel) |
| Well Number | Min Load (kN) | Max Load (kN) | Area (kNm) | |
|---|---|---|---|---|
| Well 1 | simulated | 20.90 | 51.90 | 140.35 |
| measured | 23.77 | 50.81 | 142.19 | |
| Well 2 | simulated | 17.46 | 48.28 | 92.11 |
| measured | 18.38 | 47.25 | 90.80 | |
| Well Number | Pumping Speed (min−1) | Iteration Number | Resonance Position | Resonance Frequency (Hz) | Max |MnA| (m) | Max |MnB| (m) |
|---|---|---|---|---|---|---|
| Well 1 | 1.4 | 3 | 67 | 9.8227 | 0.3064 | 0.5386 |
| 5.0 | 8 | 19 | 9.9484 | 0.2933 | 0.5159 | |
| Well 2 | 4.1 | 3 | 19 | 8.1577 | 0.1228 | 0.2009 |
| 6.0 | 3 | 13 | 8.1681 | 0.1174 | 0.2010 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, J.; Ma, H. A Novel Method for Predicting the Behavior of a Sucker Rod Pumping Unit Based on the Polished Rod Velocity. Mathematics 2024, 12, 1318. https://doi.org/10.3390/math12091318
Yin J, Ma H. A Novel Method for Predicting the Behavior of a Sucker Rod Pumping Unit Based on the Polished Rod Velocity. Mathematics. 2024; 12(9):1318. https://doi.org/10.3390/math12091318
Chicago/Turabian StyleYin, Jiaojian, and Hongzhang Ma. 2024. "A Novel Method for Predicting the Behavior of a Sucker Rod Pumping Unit Based on the Polished Rod Velocity" Mathematics 12, no. 9: 1318. https://doi.org/10.3390/math12091318
APA StyleYin, J., & Ma, H. (2024). A Novel Method for Predicting the Behavior of a Sucker Rod Pumping Unit Based on the Polished Rod Velocity. Mathematics, 12(9), 1318. https://doi.org/10.3390/math12091318