High-Order Finite-Element Framework for the Efficient Simulation of Multifluid Flows


Abstract
:1. Introduction
2. Simulating Multifluid Flows
2.1. Fluid Equations
2.2. Interface Tracking: The Level-Set Method
2.3. Finite Element Formulation
3. Numerical Setup
3.1. The Feel++ Toolboxes
- i
- a polynomial library allowing for a wide range of polynomial expansions including and elements,
- ii
- a lightweight interface to Boost.UBlas, Eigen3 and PETSc/SLEPc
- iii
- a scalable in-house solution strategy, in particular with specialized preconditioners which can easily be tuned from the configuration files
- iv
- a natural language for Galerkin methods allowing the definition of function spaces, (bi)linear forms, operators, functionals and integrals,
- v
- a framework that allows user codes to scale seamlessly from single core computation to thousands of cores and enables hybrid computing.
3.2. Fluid-Interface Coupling

3.3. Space/Time Discretization
3.4. Solving the Incompressible Navier-Stokes Equations
- add the information to the Krylov subspace method (gmres) that the system has a null space, i.e., the pressure constant.
- rescale the pressure solution after each iteration of the Newton algorithm by imposing a mean pressure equal to 0.
3.5. The Level-Set Framework
3.5.1. Level-Set Advection
3.5.2. Geometrical Quantities
3.5.3. Redistantiation
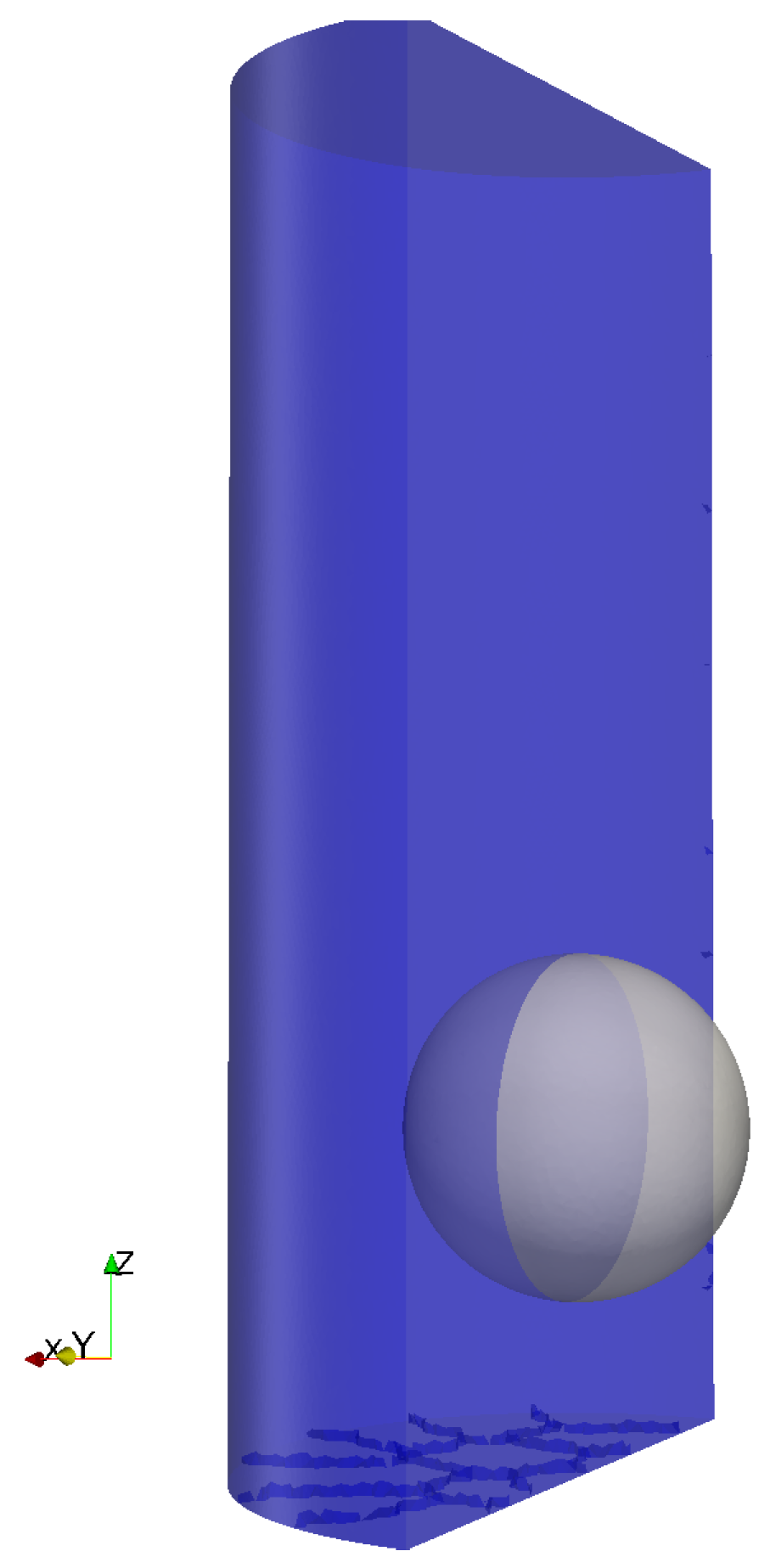
4. 3D Rising Drops Benchmark
4.1. Benchmark Problem
4.2. Simulation Setup
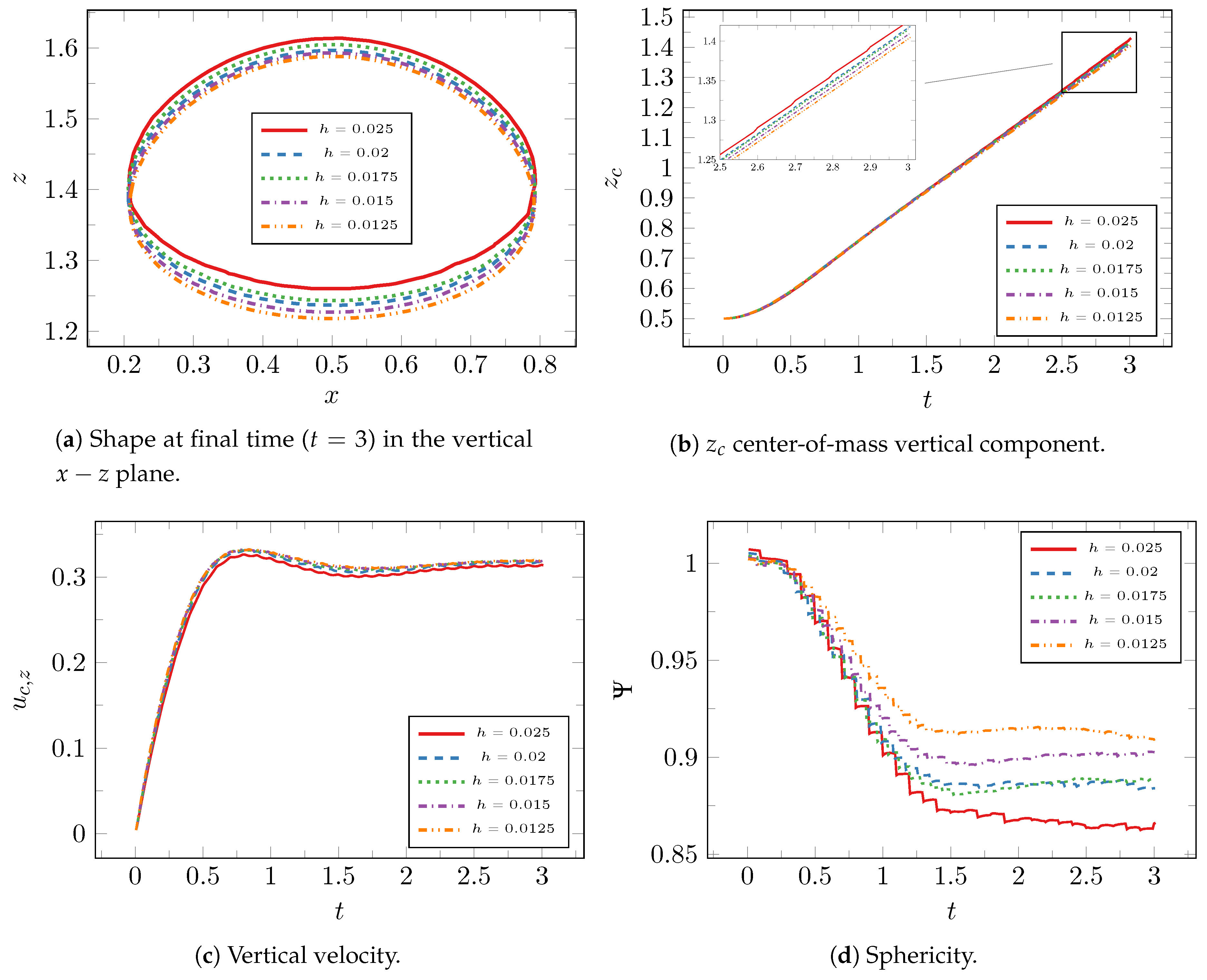
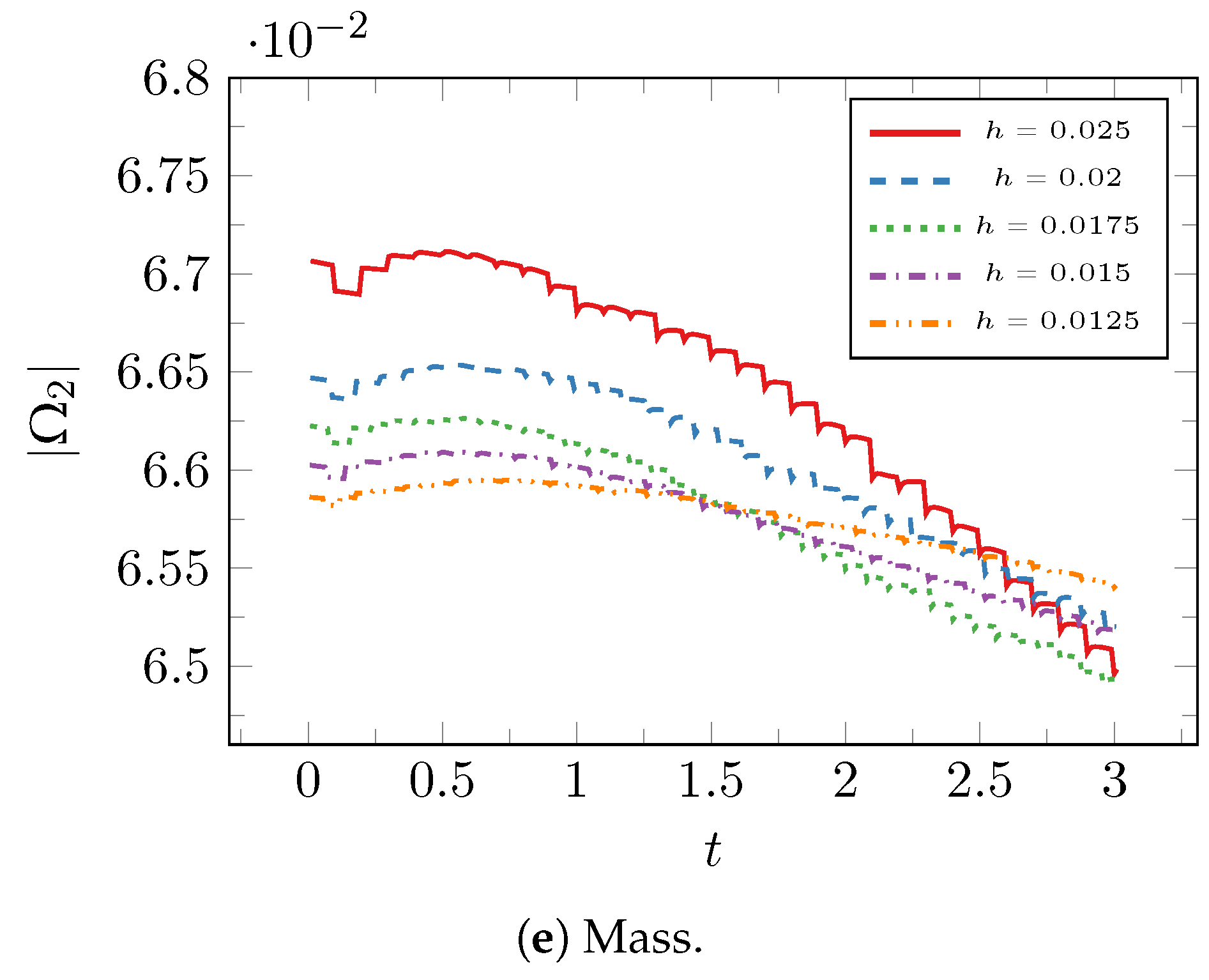
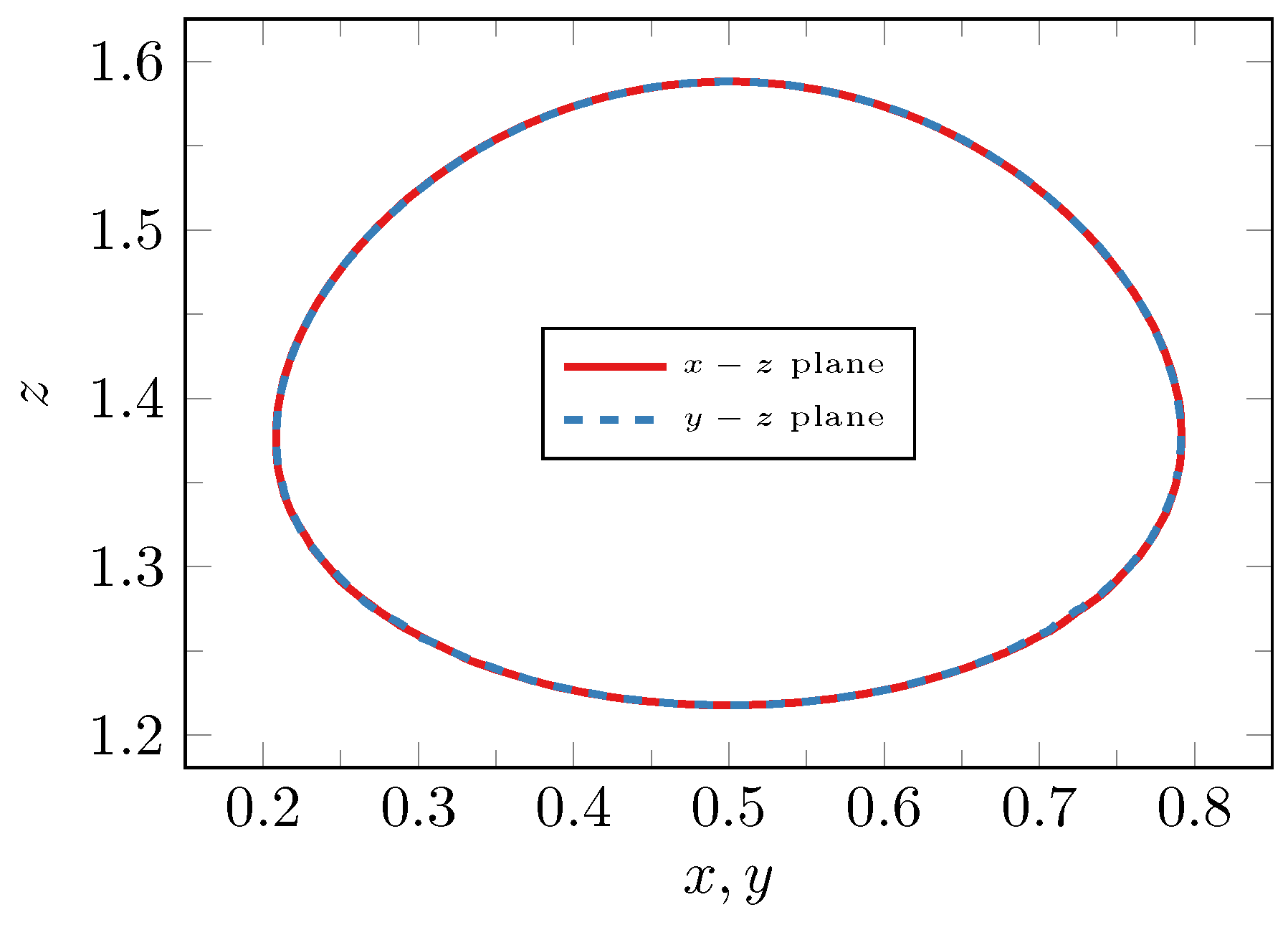
5. Results
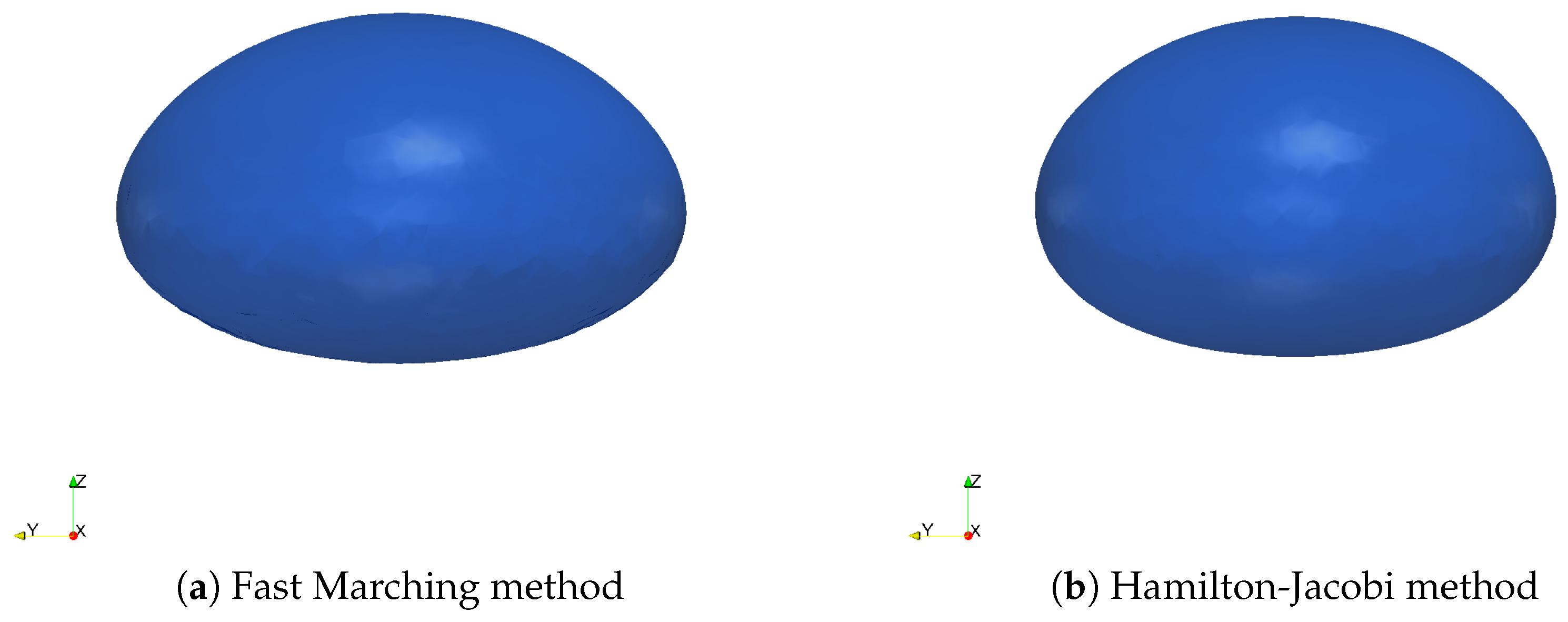
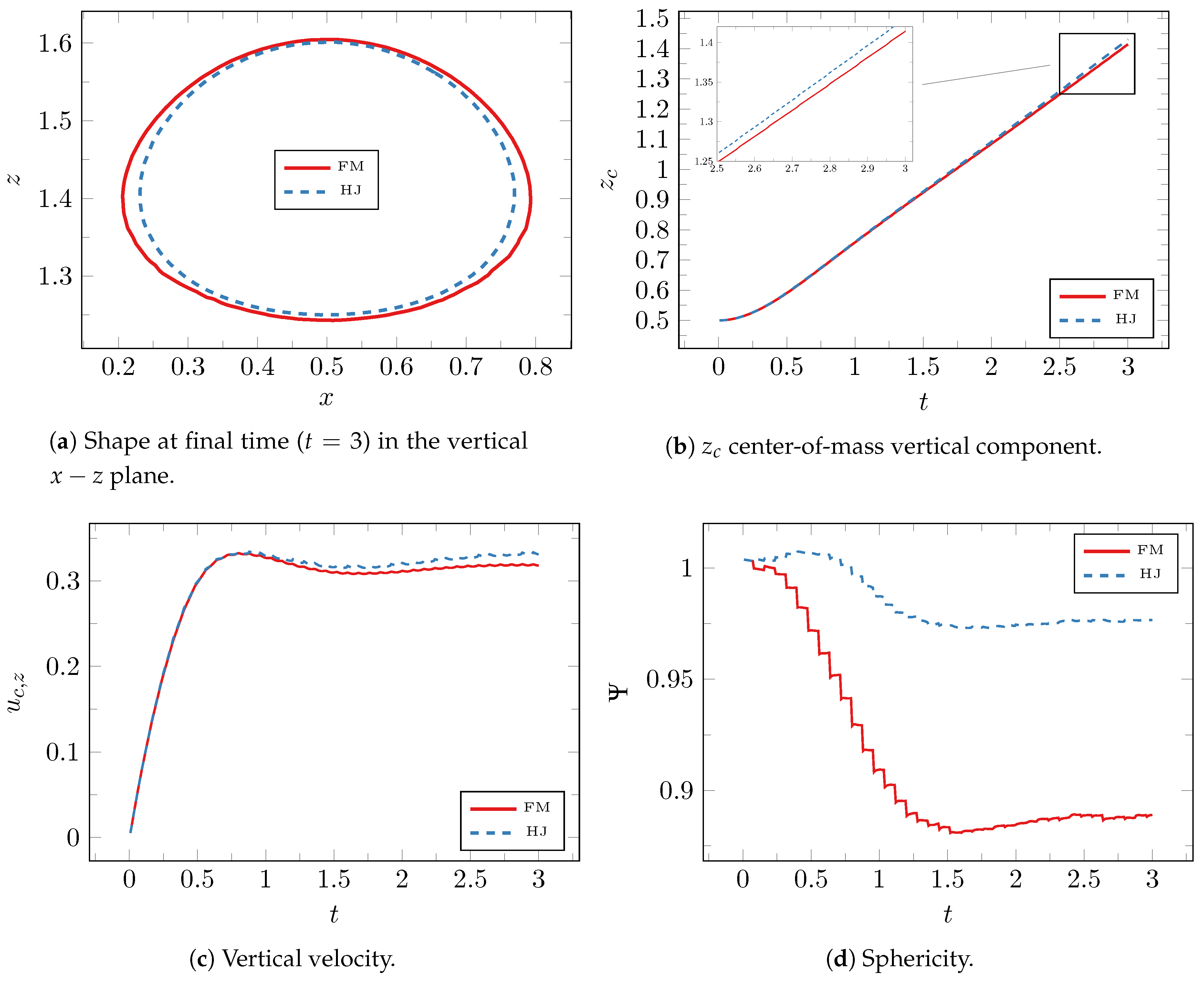
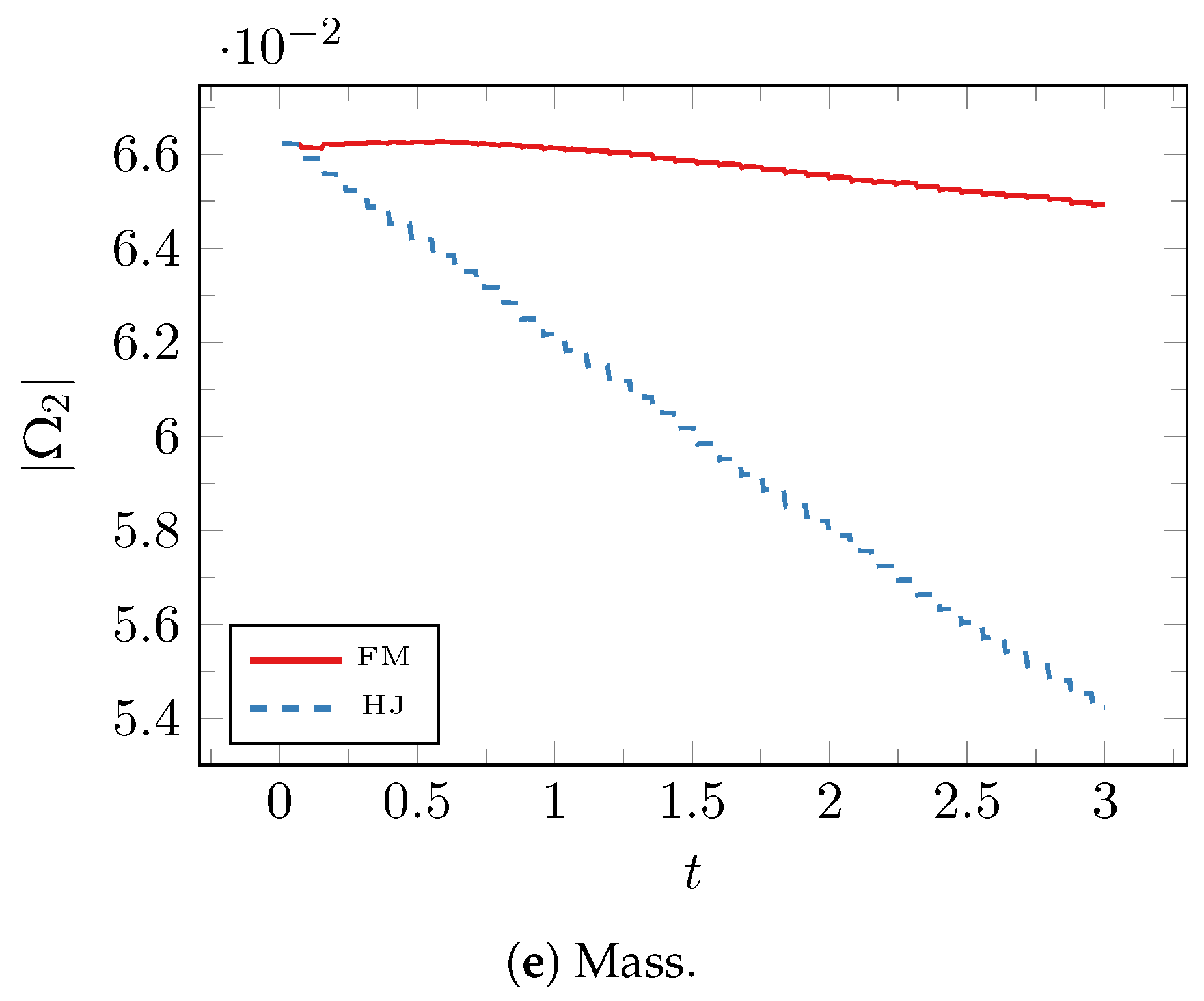
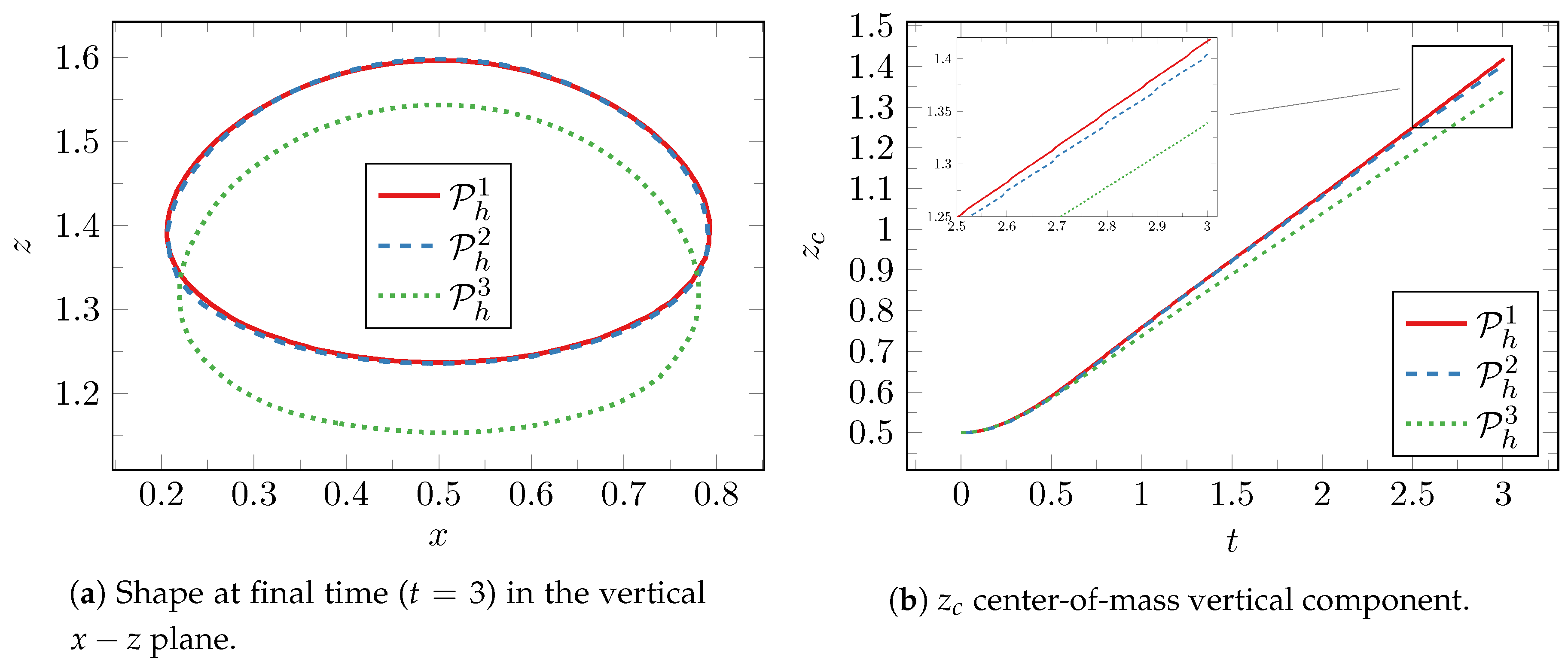
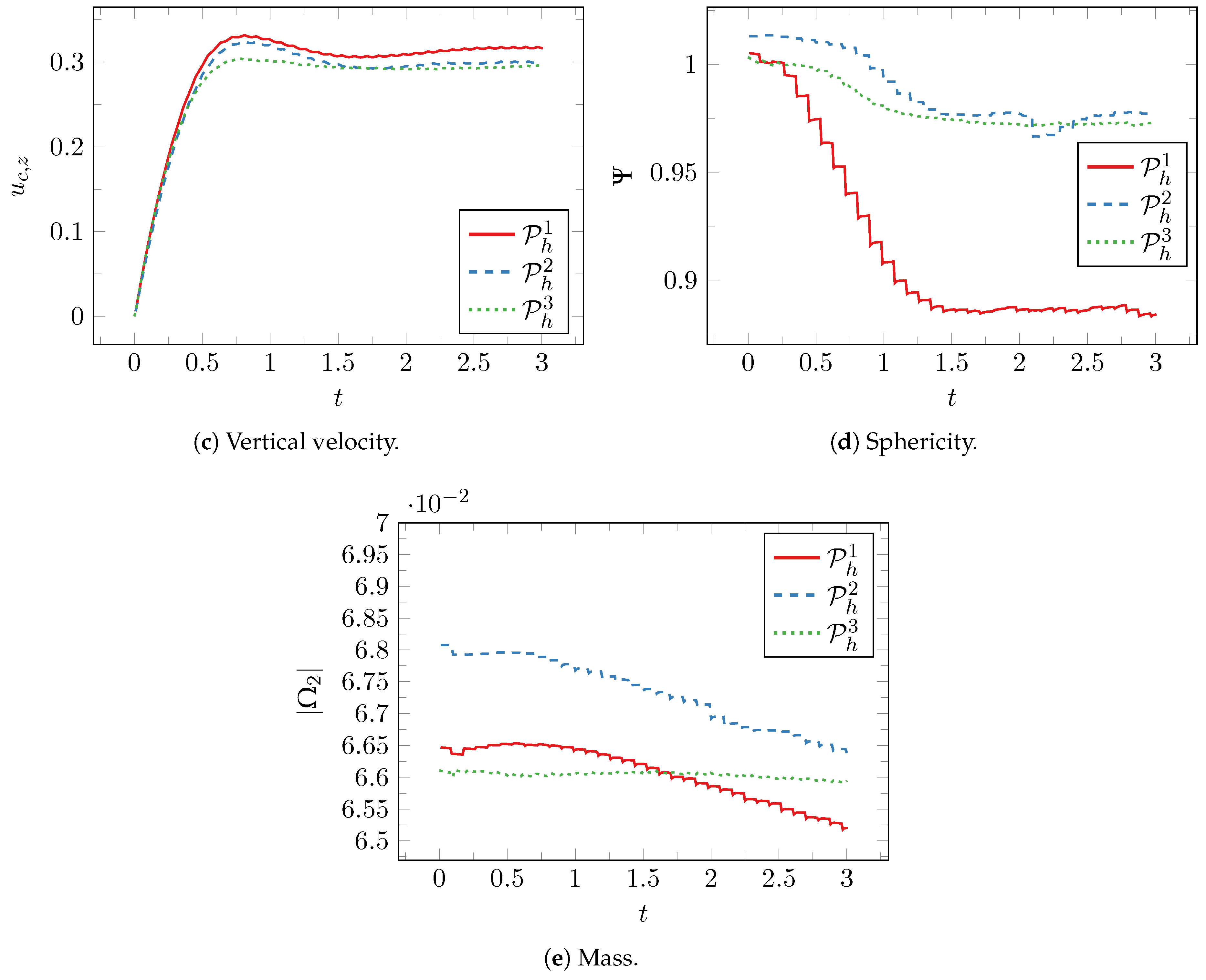
5.1. Case 1: The Ellipsoidal Drop
5.1.1. Comparison between Hamilton-Jacobi and Fast-Marching Reinitialization
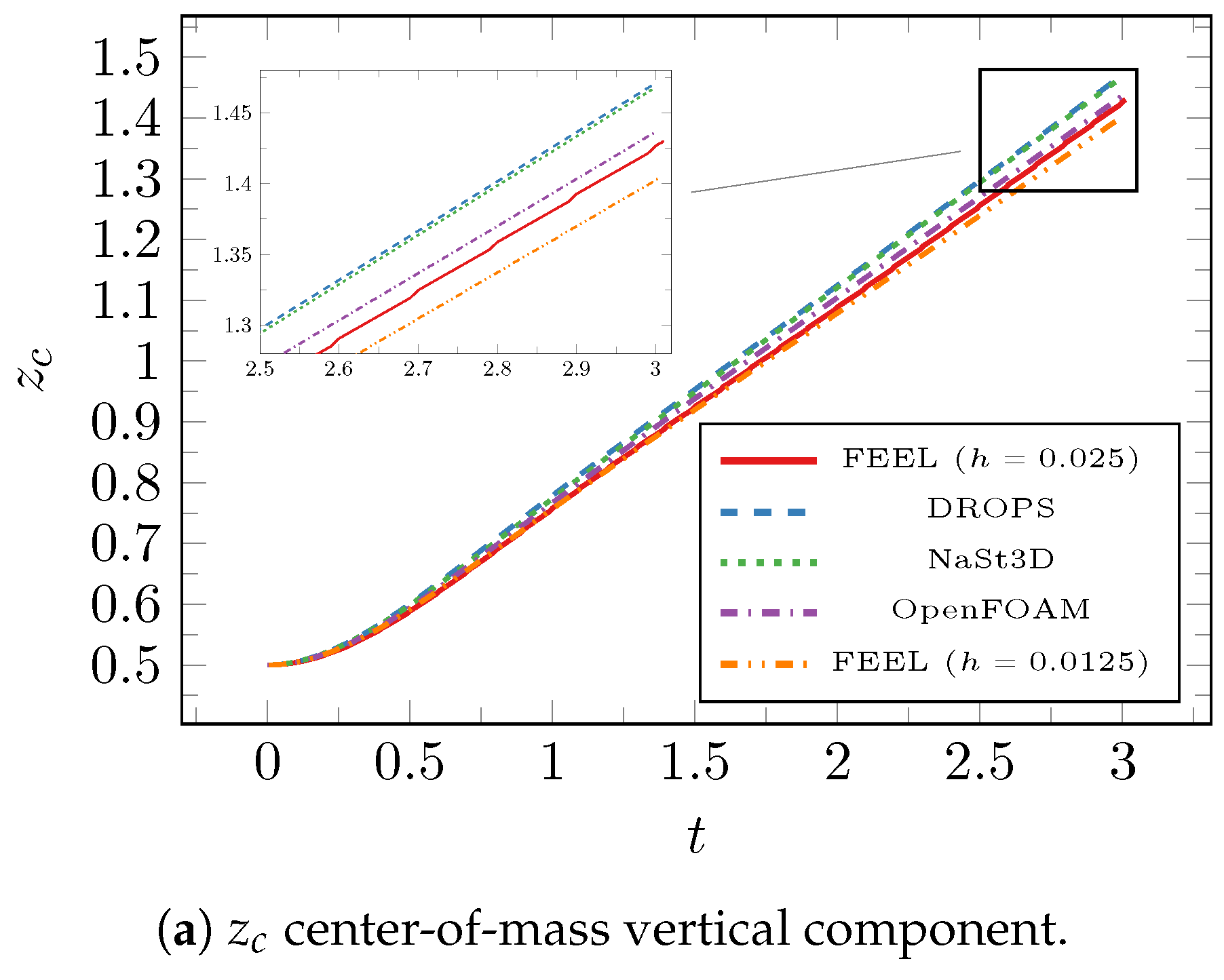
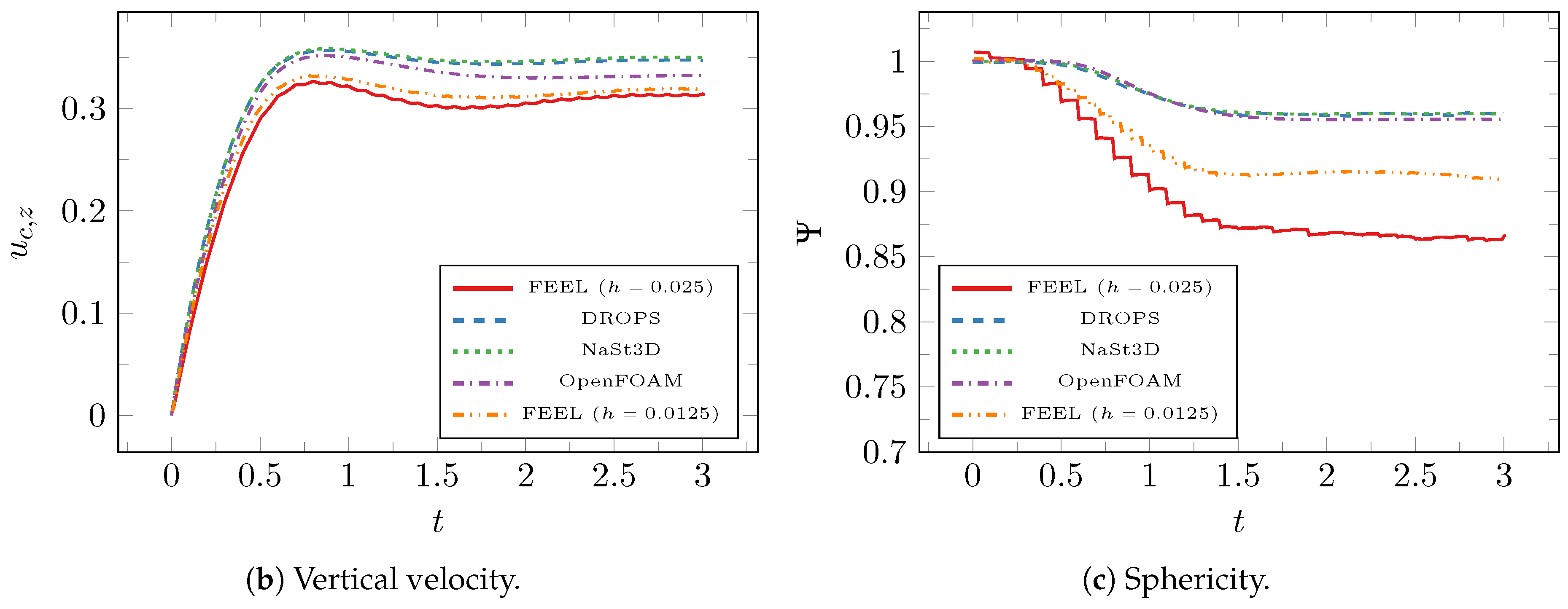
5.1.2. Comparison with Previous Results
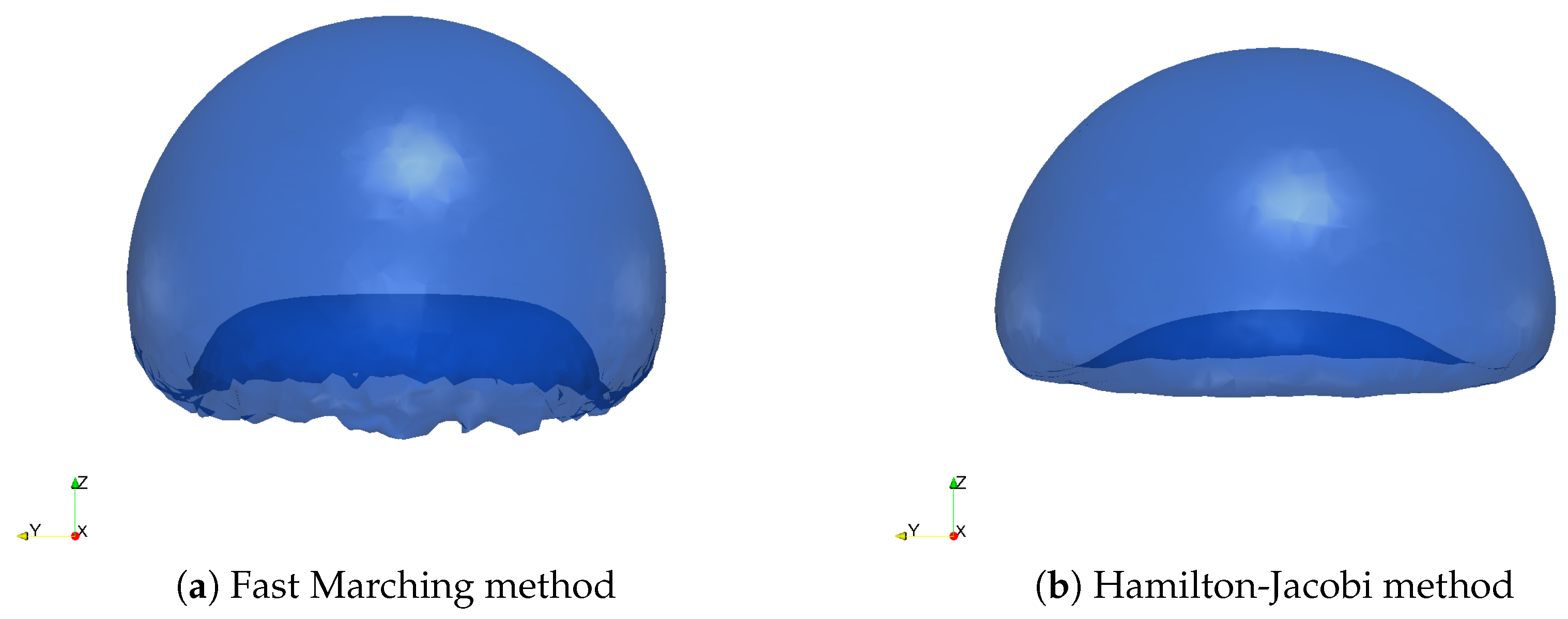
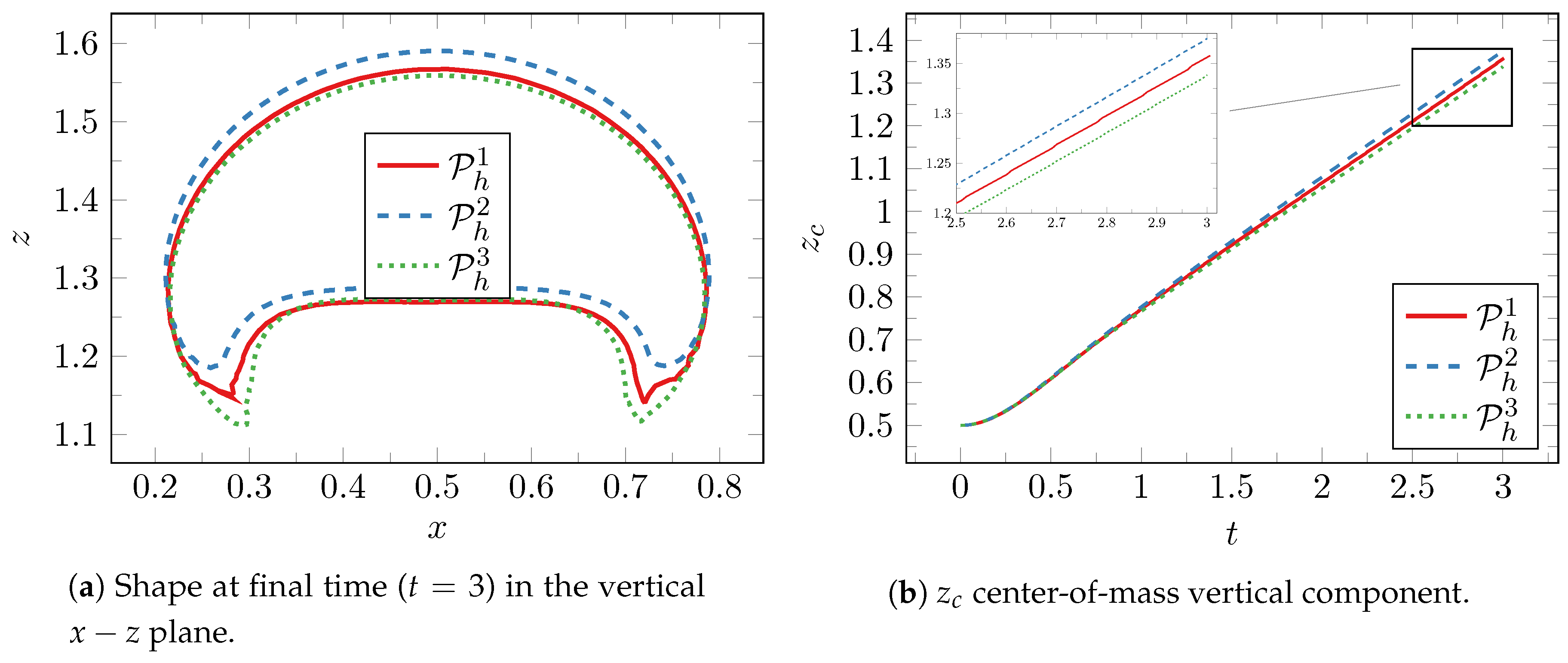
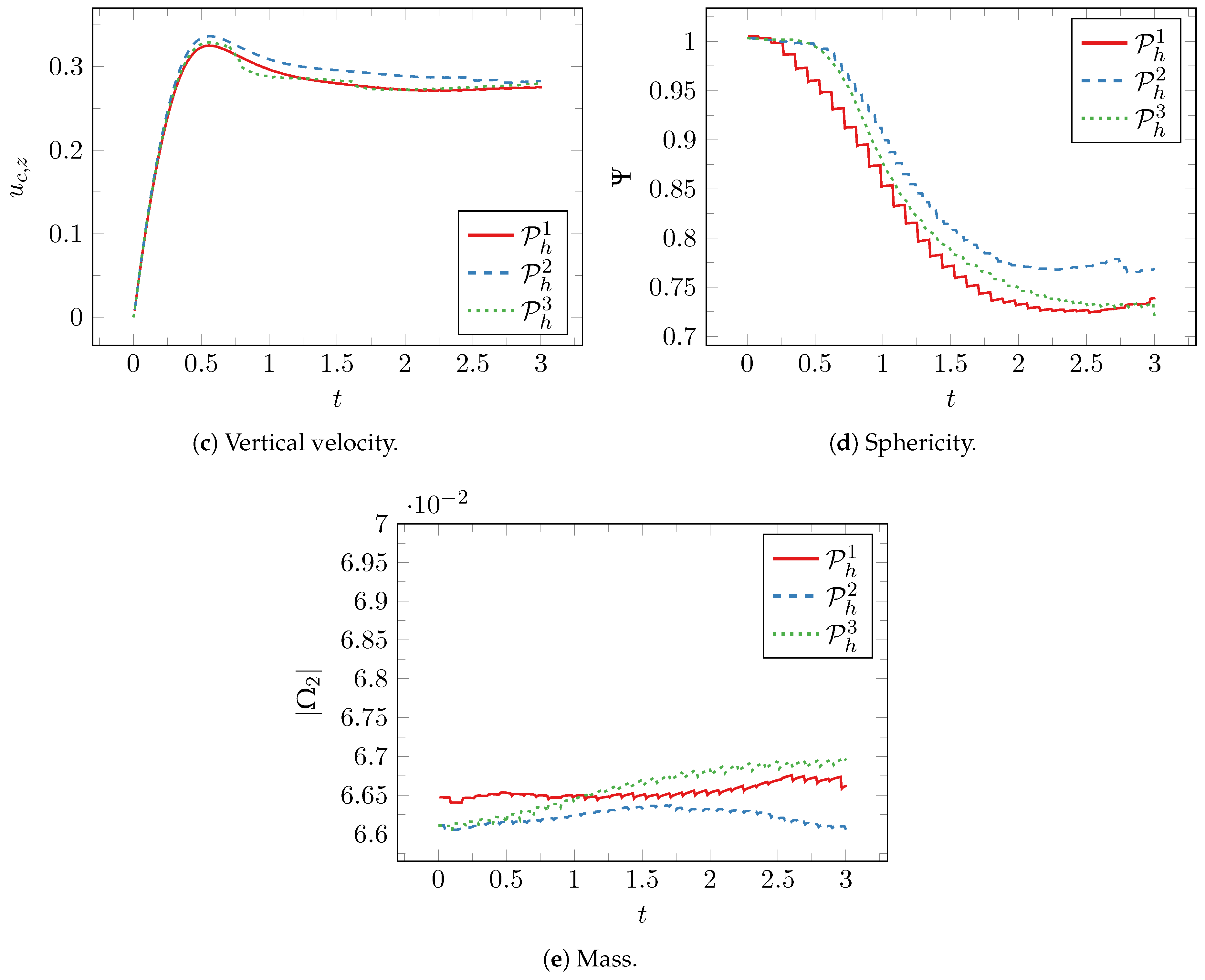
5.2. Case 2: The Skirted Drop
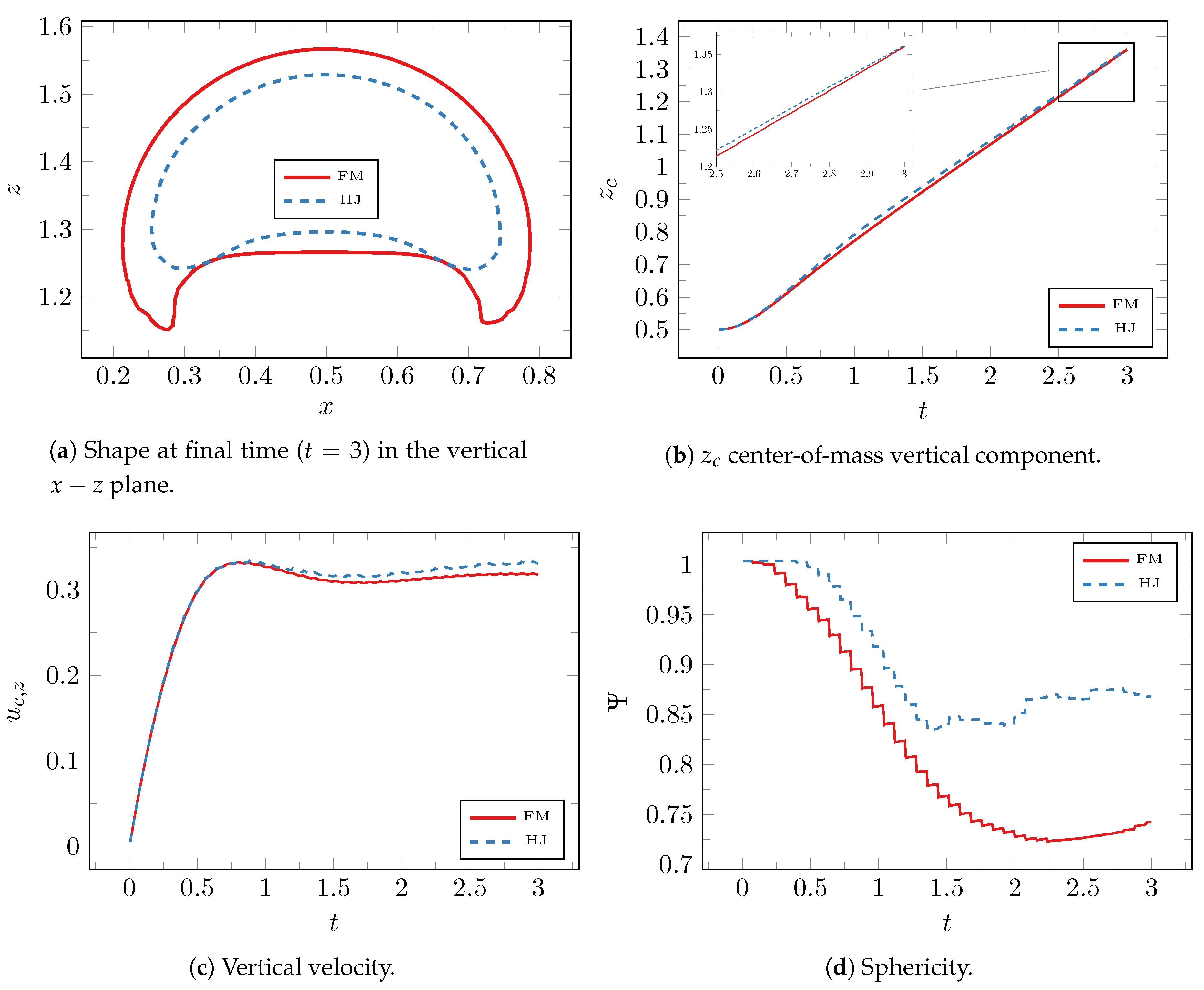
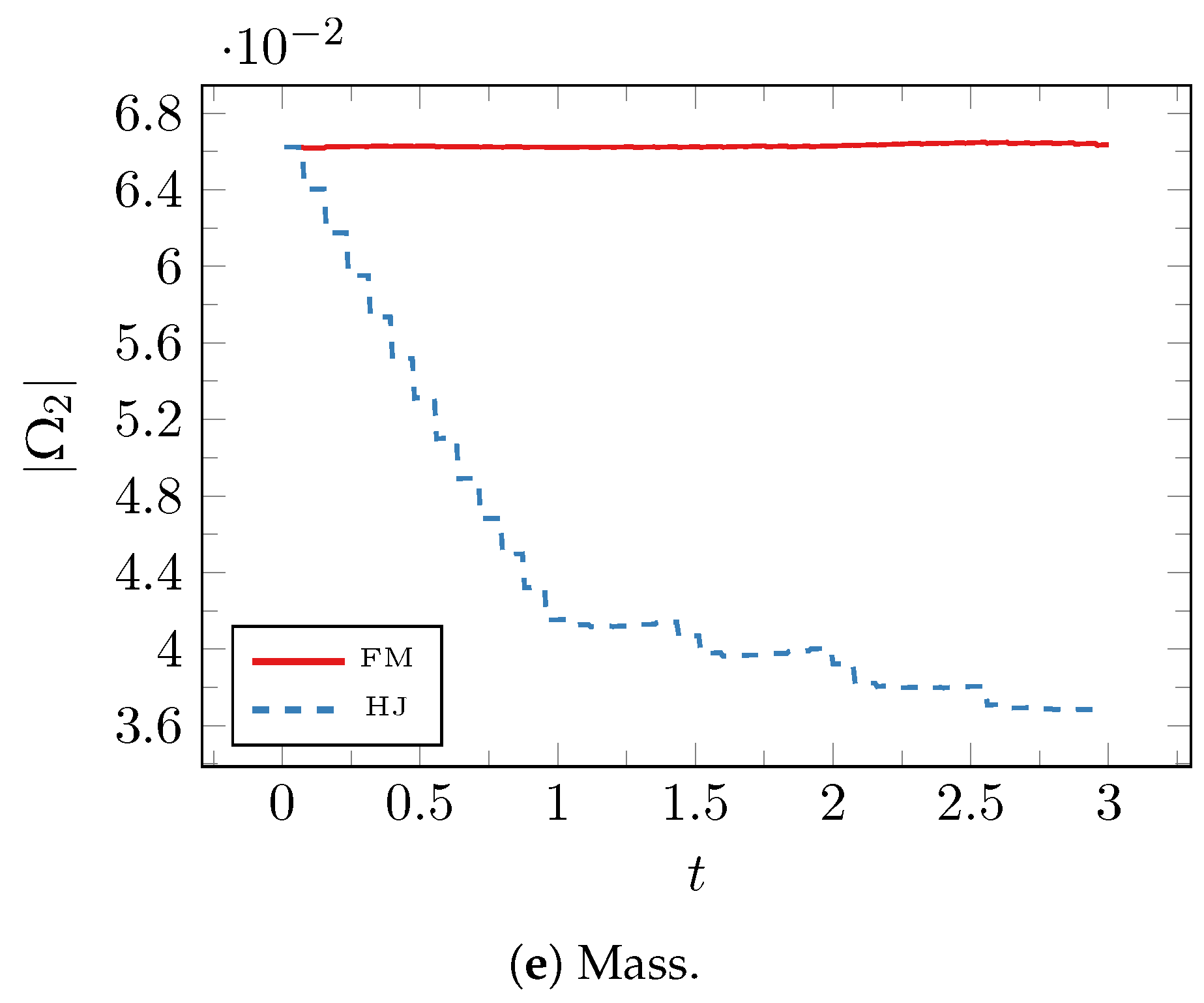
5.2.1. Comparison between Hamilton-Jacobi and Fast-Marching Reinitialization
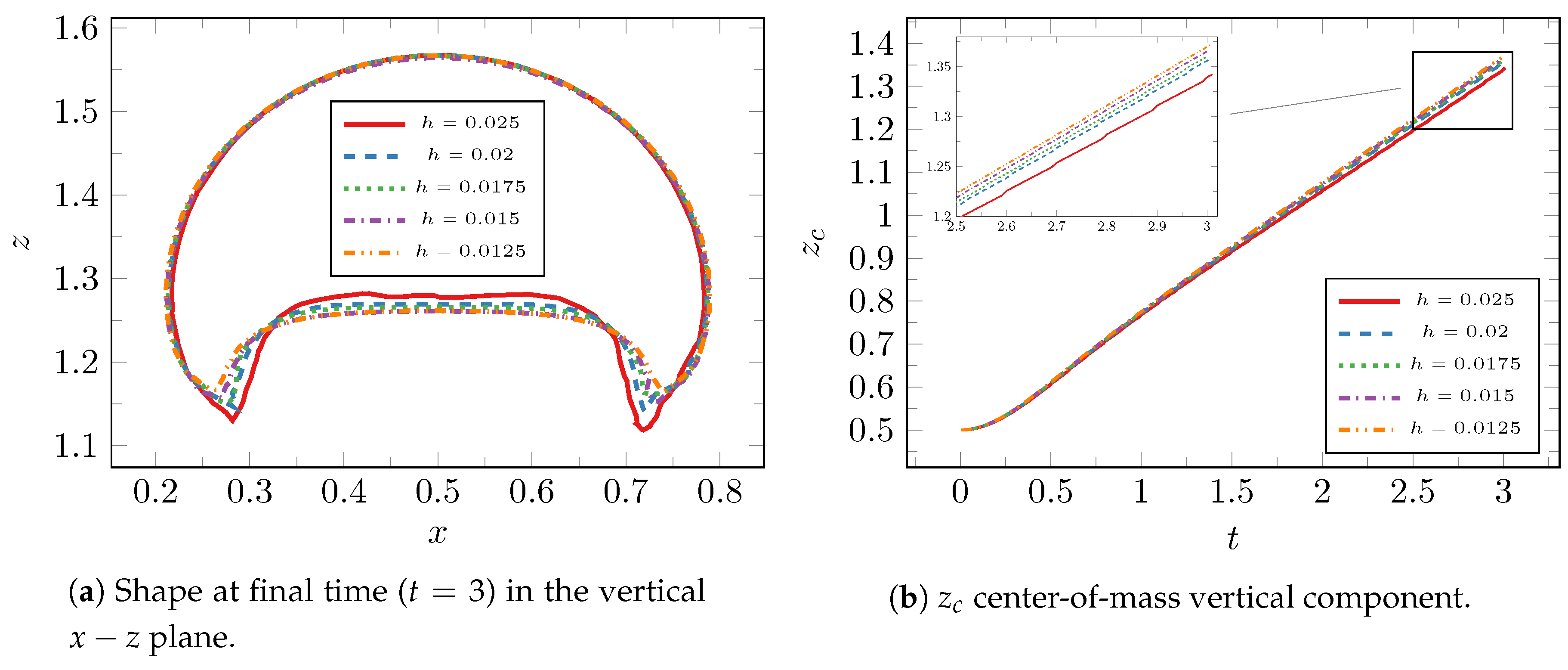
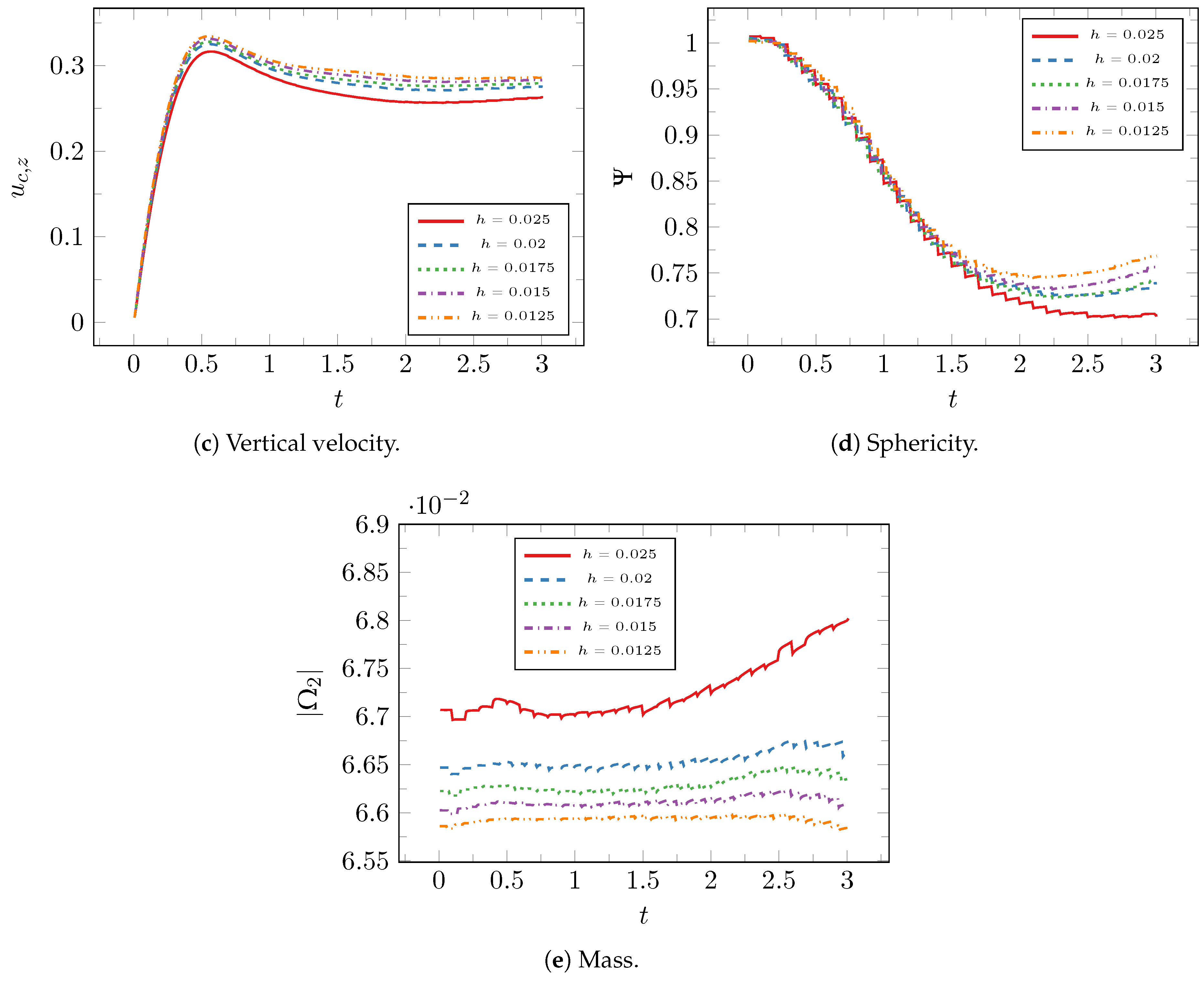
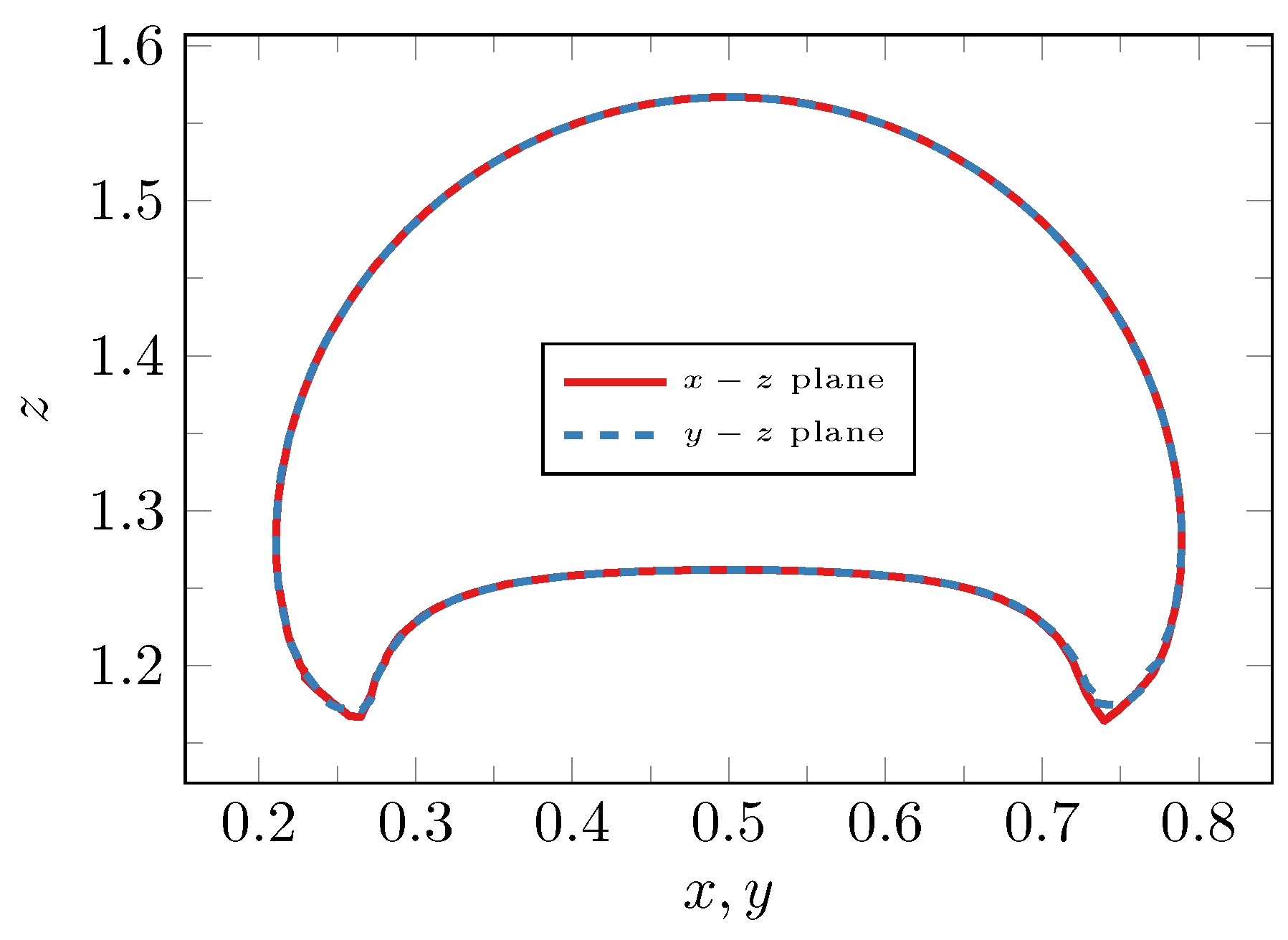
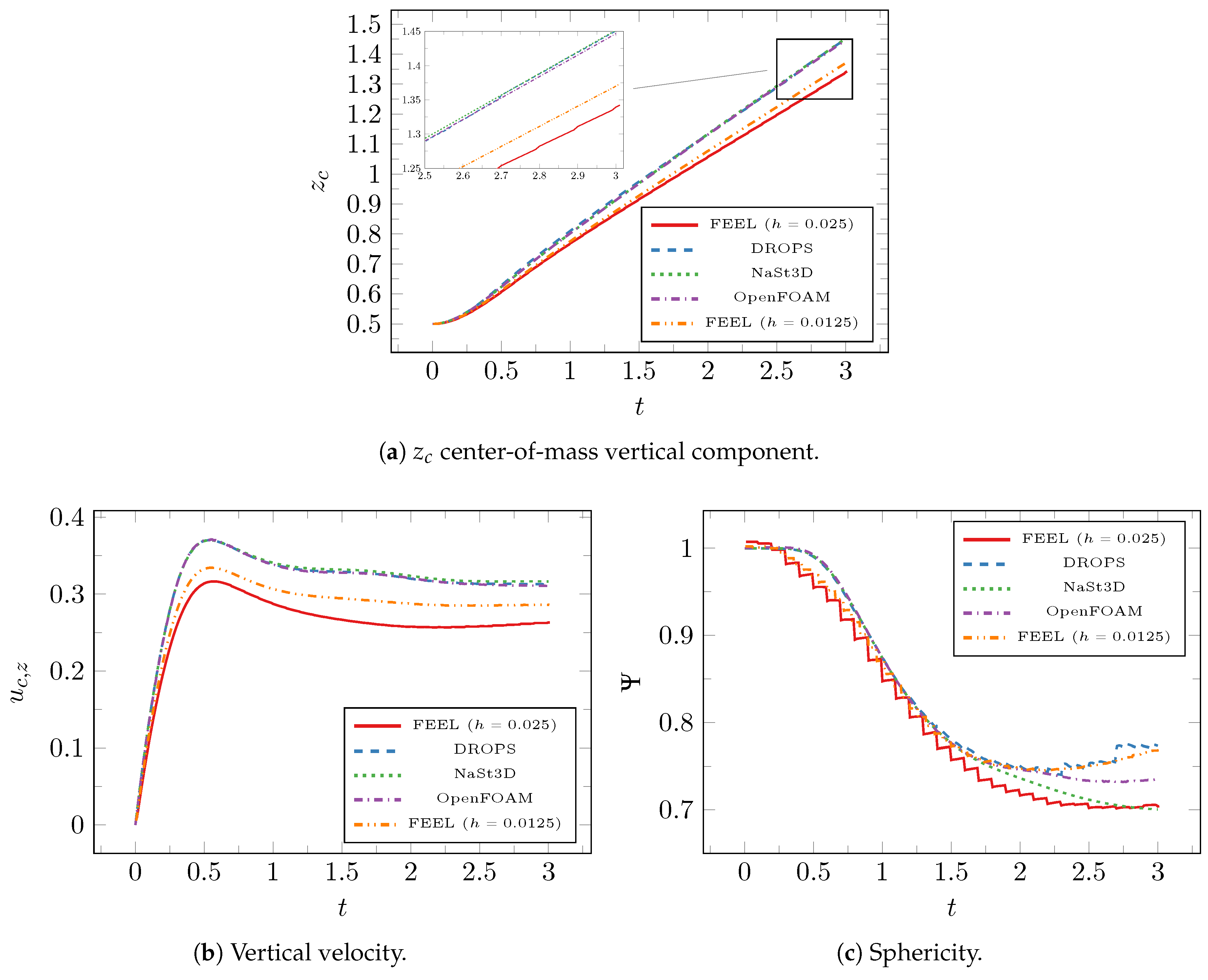
5.2.2. Comparison with Previous Results
5.3. High-Order Simulations
6. Conclusions and Outlooks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Acrivos, A. The deformation and break-up of single drops in shear fields. In Physicochemical Hydrodynamics; Springer: Boston, MA, USA, 1988; pp. 1–18. [Google Scholar]
- Saurel, R.; Lemetayer, O. A multiphase model for compressible flows with interfaces, shocks, detonation waves and cavitation. J. Fluid Mech. 2001, 431, 239–271. [Google Scholar] [CrossRef]
- Tryggvason, G.; Dahm, W.; Sbeih, K. Fine structure of vortex sheet rollup by viscous and inviscid simulation. J. Fluids Eng. 1991, 113, 31–36. [Google Scholar] [CrossRef]
- Mishra, A.A.; Hasan, N.; Sanghi, S.; Kumar, R. Two-dimensional buoyancy driven thermal mixing in a horizontally partitioned adiabatic enclosure. Phys. Fluids 2008, 20, 063601. [Google Scholar] [CrossRef]
- Hirt, C.; Amsden, A.A.; Cook, J. An arbitrary Lagrangian-Eulerian computing method for all flow speeds. J. Comput. Phys. 1974, 14, 227–253. [Google Scholar] [CrossRef]
- Maury, B. A fat boundary method for the Poisson problem in a domain with holes. J. Sci. Comput. 2001, 16, 319–339. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Fix, G.J. Phase Field Methods for Free Boundary Problems; Technical Report 82-1; NASA Langley Research Center: Hampton, VA, USA, 1982.
- Langer, J. Models of pattern formation in first-order phase transitions. In Directions in Condensed Matter Physics: Memorial Volume in Honor of Shang-Keng Ma; World Scientific: Singapore, 1986; pp. 165–186. [Google Scholar]
- Osher, S.; Sethian, J.A. Fronts Propagating with Curvature Dependent Speed: Algorithms Based on Hamilton-Jacobi Formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef]
- Prud’Homme, C.; Chabannes, V.; Doyeux, V.; Ismail, M.; Samake, A.; Pena, G. Feel++: A Computational Framework for Galerkin Methods and Advanced Numerical Methods In ESAIM: Proceedings; EDP Sciences: Ulysse, France, 2012. [Google Scholar]
- Prud’homme, C.; Chabannes, V.; Pena, G. Feel++: Finite Element Embedded Language in C++; Contributions from A. Samake, V. Doyeux, M. Ismail and S. Veys. Available online: http://www.feelpp.org (accessed on 20 August 2018).
- Prud’homme, C. A domain specific embedded language in C++ for automatic differentiation, projection, integration and variational formulations. Sci. Program. 2006, 14, 81–110. [Google Scholar] [CrossRef]
- Feel++ Consortium. Multifluid Flow Benchmarks. Available online: http://docs.feelpp.org/cases/0.105/Multifluid/ (accessed on 31 August 2018).
- Feel++ Consortium. Feel++ Github. Available online: https://github.com/feelpp/feelpp (accessed on 31 August 2018).
- Sethian, J. Level Set Methods and Fast Marching Methods; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Stanley Osher, R.F. Level Set Methods and Dynamic Implicit Surfaces; Antman, S.S., Marsden, J.E., Sirovich, L., Eds.; Springer: Berlin, Germany.
- Rouy, E.; Tourin, A. A viscosity solutions approach to shape-from-shading. SIAM J. Numer. Anal. 1992, 29, 867–884. [Google Scholar] [CrossRef]
- Sussman, M.; Smereka, P.; Osher, S. A Level Set Approach for Computing Solutions to Incompressible Two-Phase Flow. J. Comput. Phys. 1994, 114, 146–159. [Google Scholar] [CrossRef]
- Sethian, J.A. Level Set Methods and Fast Marching Methods: Evolving Interfaces in Computational Geometry, Fluid Mechanics, Computer Vision, and Materials Science; Cambridge University Press: Cambridge, UK, 1999; Volume 3. [Google Scholar]
- Chang, Y.C.; Hou, T.; Merriman, B.; Osher, S. A level set formulation of Eulerian interface capturing methods for incompressible fluid flows. J. Comput. Phys. 1996, 124, 449–464. [Google Scholar] [CrossRef]
- Cottet, G.H.; Maitre, E. A level set method for fluid-structure interactions with immersed surfaces. Math. Models Methods Appl. Sci. 2006, 16, 415–438. [Google Scholar] [CrossRef]
- Caldini Queiros, C.; Chabannes, V.; Ismail, M.; Pena, G.; Prud’Homme, C.; Szopos, M.; Tarabay, R. Towards large-scale three-dimensional blood flow simulations in realistic geometries. In ESAIM: Proceedings; EDP Sciences: Ulysse, France, 2013; Volume 43, pp. 195–212. [Google Scholar]
- Chabannes, V.; Ismail, M.; Prud’Homme, C.; SZOPOS, M. Hemodynamic simulations in the cerebral venous network: A study on the influence of different modeling assumptions. J. Coupled Syst. Multiscale Dyn. 2015, 3, 23–37. [Google Scholar] [CrossRef] [Green Version]
- Daversin, C.; Prudhomme, C.; Trophime, C. Full 3D MultiPhysics Model of High Field PolyHelices Magnets. IEEE Trans. Appl. Supercond. 2016, 26, 1–4. [Google Scholar] [CrossRef]
- Daversin, C.; Prud’Homme, C. Simultaneous Empirical Interpolation and Reduced Basis Method: Application to Non-linear Multi-Physics Problem. In Model Reduction of Parametrized Systems; Springer: Cham, Switzerland, 2017; pp. 17–35. [Google Scholar]
- Quarteroni, A.; Quarteroni, S. Numerical Models for Differential Problems; Springer: Milan, Italy, 2009; Volume 2. [Google Scholar]
- Brooks, A.N.; Hughes, T.J. Streamline upwind/Petrov-Galerkin formulations for convection dominated flows with particular emphasis on the incompressible Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 1982, 32, 199–259. [Google Scholar] [CrossRef]
- Franca, L.P.; Hughes, T.J. Two classes of mixed finite element methods. Comput. Methods Appl. Mech. Eng. 1988, 69, 89–129. [Google Scholar] [CrossRef]
- Hughes, T.J.; Franca, L.P.; Hulbert, G.M. A new finite element formulation for computational fluid dynamics: VIII. The galerkin/least-squares method for advective-diffusive equations. Comput. Methods Appl. Mech. Eng. 1989, 73, 173–189. [Google Scholar] [CrossRef]
- Hauke, G. A simple subgrid scale stabilized method for the advection–diffusion-reaction equation. Comput. Methods Appl. Mech. Eng. 2002, 191, 2925–2947. [Google Scholar] [CrossRef]
- Douglas, J.; Dupont, T. Interior penalty procedures for elliptic and parabolic Galerkin methods. In Computing Methods in Applied Sciences; Springer: Berlin/Heidelberg, Germany, 1976; pp. 207–216. [Google Scholar]
- Chaple, R.P.B. Numerical Stabilization of Convection-Diffusion-Reaction Problems; Delft University of Technology: Delft, The Netherlands, 2006. [Google Scholar]
- Codina, R. Comparison of some finite element methods for solving the diffusion-convection-reaction equation. Comput. Methods Appl. Mech. Eng. 1998, 156, 185–210. [Google Scholar] [CrossRef]
- Winkelmann, C. Interior Penalty Finite Element Approximation of Navier-Stokes Equations and Application to Free Surface Flows. Ph.D. Thesis, École polytechnique fédérale de Lausanne (EPFL), Lausanne, Switzerland, 2007. [Google Scholar]
- Tezduyar, T.E.; Osawa, Y. Finite element stabilization parameters computed from element matrices and vectors. Comput. Methods Appl. Mech. Eng. 2000, 190, 411–430. [Google Scholar] [CrossRef]
- Franca, L.P.; Valentin, F. On an improved unusual stabilized finite element method for the advective–reactive– diffusive equation. Comput. Methods Appl. Mech. Eng. 2000, 190, 1785–1800. [Google Scholar] [CrossRef]
- Balay, S.; Gropp, W.D.; McInnes, L.C.; Smith, B.F. Efficient Management of Parallelism in Object-Oriented Numerical Software Libraries. In Modern Software Tools in Scientific Computing; Birkhauser Press: Boston, MA, USA, 1997; pp. 163–202. [Google Scholar]
- Balay, S.; Abhyankar, S.; Adams, M.F.; Brown, J.; Brune, P.; Buschelman, K.; Dalcin, L.; Eijkhout, V.; Gropp, W.D.; Kaushik, D.; et al. PETSc Users Manual. In Technical Report ANL-95/11–Revision 3.9; Argonne National Laboratory: Lemont, IL, USA, 2018. [Google Scholar]
- Doyeux, V. Modélisation et Simulation de Systèmes Multi-Fluides. Applications aux écoulements Sanguins. Ph.D. Thesis, Université Joseph Fourier, Grenoble, France, 2014. [Google Scholar]
- Chabannes, V.; Pena, G.; Prud’homme, C. High order fluid structure interaction in 2D and 3D. Application to blood flow in arteries. In Proceedings of the Fifth International Conference on Advanced COmputational Methods in ENgineering (ACOMEN 2011), Liege, Belgium, 14–17 November 2011. [Google Scholar]
- Hysing, S.; Turek, S.; Kuzmin, D.; Parolini, N.; Burman, E.; Ganesan, S.; Tobiska, L. Quantitative benchmark computations of two-dimensional bubble dynamics. Int. J. Numer. Methods Fluids 2009, 60, 1259–1288. [Google Scholar] [CrossRef]
- Doyeux, V.; Guyot, Y.; Chabannes, V.; Prud’Homme, C.; Ismail, M. Simulation of two-fluid flows using a finite element/level set method. Application to bubbles and vesicle dynamics. J. Comput. Appl. Math. 2013, 246, 251–259. [Google Scholar] [CrossRef]
- Adelsberger, J.; Esser, P.; Griebel, M.; Groß, S.; Klitz, M.; Rüttgers, A. 3D incompressible two-phase flow benchmark computations for rising droplets. In Proceedings of the 11th World Congress on Computational Mechanics (WCCM XI), Barcelona, Spain, 20–25 July 2014; Volume 179. [Google Scholar]
- Patankar, S.V.; Spalding, D.B. A calculation procedure for heat, mass and momentum transfer in three-dimensional parabolic flows. Int. J. Heat Mass Transf. 1972, 15, 1787–1806. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tests | Re | ||||||
|---|---|---|---|---|---|---|---|
| Case 1 (ellipsoidal drop) | 1000 | 100 | 10 | 1 | 24.5 | 35 | 10 |
| Case 2 (skirted drop) | 1000 | 1 | 10 | 0.1 | 1.96 | 35 | 125 |
| Mesh Properties | Finite-Element DOF | ||||
|---|---|---|---|---|---|
| Tetrahedra | Points | Order 1 DOF | Order 2 DOF | #DOF | |
| 0.025 | 380,125 | 62,546 | 62,546 | 490,300 | 1,595,992 |
| 0.02 | 842,865 | 136,932 | 136,932 | 1,092,644 | 3,551,796 |
| 0.0175 | 1,148,581 | 186,136 | 186,136 | 1,489,729 | 4,841,459 |
| 0.015 | 1,858,603 | 299,595 | 299,595 | 2,415,170 | 7,844,700 |
| 0.0125 | 2,983,291 | 479,167 | 479,167 | 3,881,639 | 12,603,251 |
| Numerical Parameters | Total Time (h) | |||
|---|---|---|---|---|
| #proc | Case 1 | Case 2 | ||
| 0.025 | 64 | 3.5 | 3.6 | |
| 0.02 | 128 | 4.8 | 5.1 | |
| 0.0175 | 128 | 8.9 | 9.5 | |
| 0.015 | 192 | 12.3 | 13.5 | |
| 0.0125 | 192 | 33.8 | 39.6 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Metivet, T.; Chabannes, V.; Ismail, M.; Prud’homme, C. High-Order Finite-Element Framework for the Efficient Simulation of Multifluid Flows. Mathematics 2018, 6, 203. https://doi.org/10.3390/math6100203
Metivet T, Chabannes V, Ismail M, Prud’homme C. High-Order Finite-Element Framework for the Efficient Simulation of Multifluid Flows. Mathematics. 2018; 6(10):203. https://doi.org/10.3390/math6100203
Chicago/Turabian StyleMetivet, Thibaut, Vincent Chabannes, Mourad Ismail, and Christophe Prud’homme. 2018. "High-Order Finite-Element Framework for the Efficient Simulation of Multifluid Flows" Mathematics 6, no. 10: 203. https://doi.org/10.3390/math6100203
APA StyleMetivet, T., Chabannes, V., Ismail, M., & Prud’homme, C. (2018). High-Order Finite-Element Framework for the Efficient Simulation of Multifluid Flows. Mathematics, 6(10), 203. https://doi.org/10.3390/math6100203