Storage and Dissipation of Energy in Prabhakar Viscoelasticity


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Storage and Dissipation of Energy in Linear Viscoelasticity
3. Quality Factor in Prabhakar-Like Viscoelasticity
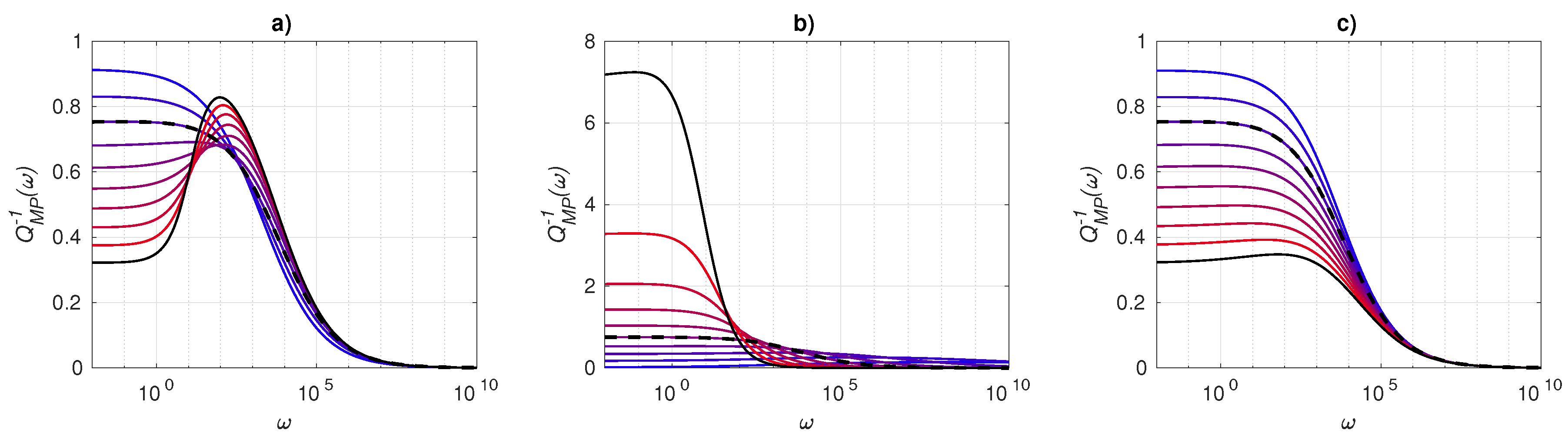
4. Quality Factor for Some Specific Realizations of the Maxwell–Prabhakar Model
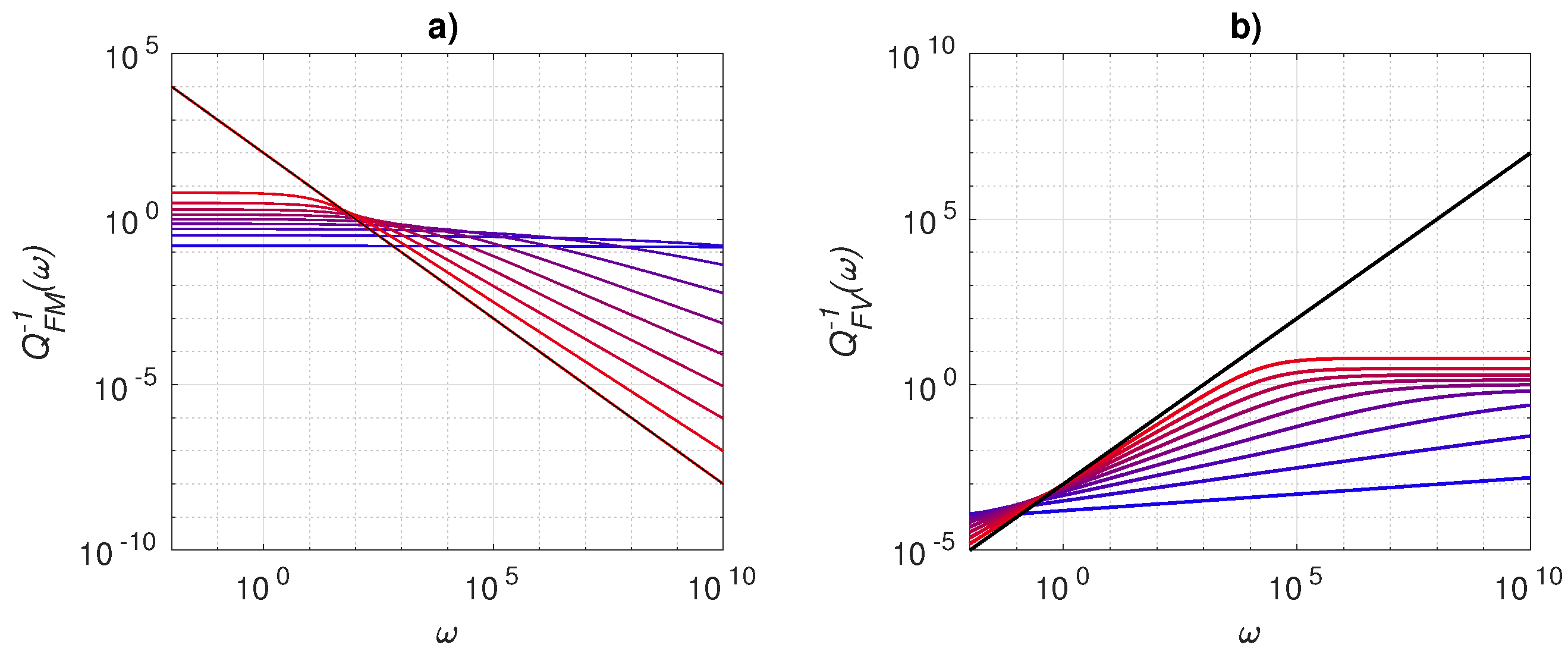
4.1. Fractional Maxwell Model
- (i)
- , , , , ;
- (ii)
- , , , , .
4.2. Fractional Voigt Model
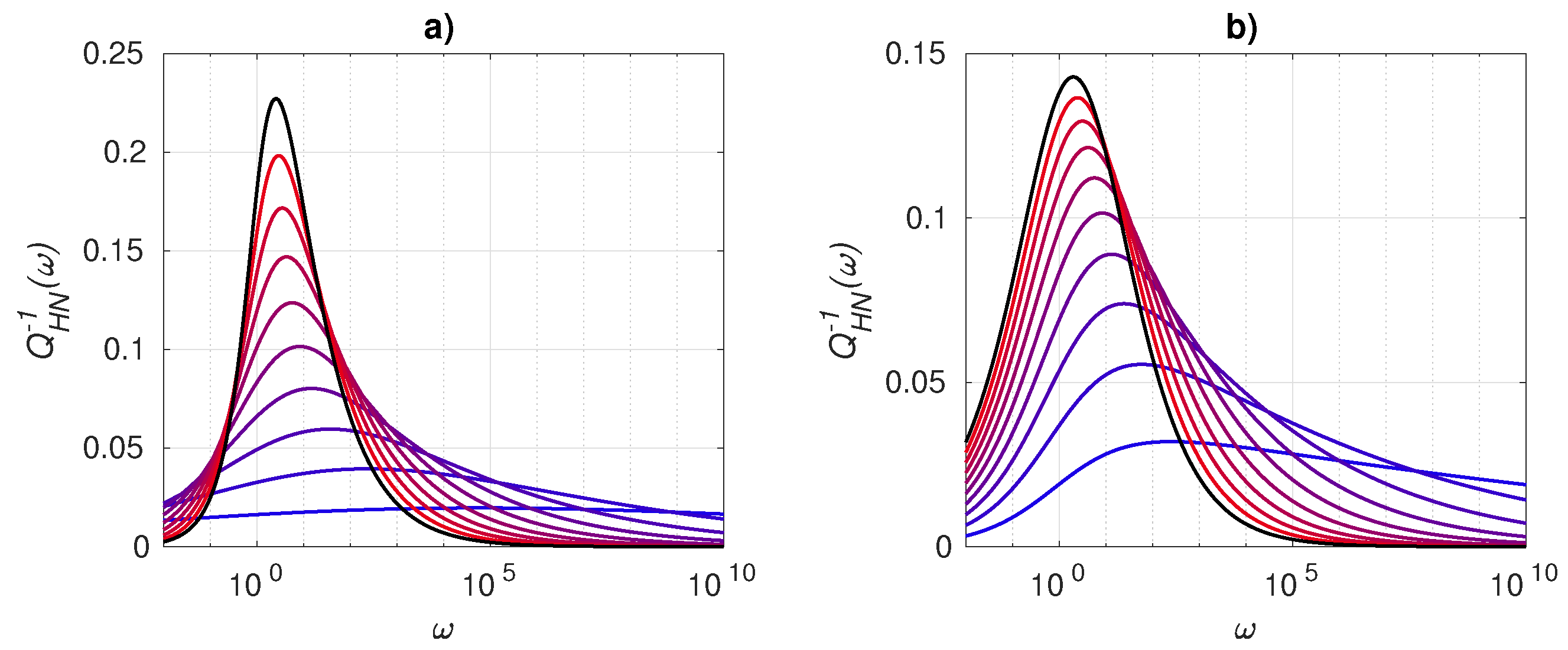
4.3. Havriliak–Negami Model
5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Colombaro, I.; Giusti, A.; Mainardi, F. On transient waves in linear viscoelasticity. Wave Motion 2017, 74, 191–212. [Google Scholar] [CrossRef]
- Colombaro, I.; Giusti, A.; Mainardi, F. On the propagation of transient waves in a viscoelastic Bessel medium. Z. Angew. Math. Phys. 2017, 68, 62–74. [Google Scholar] [CrossRef]
- Colombaro, I.; Giusti, A.; Mainardi, F. A class of linear viscoelastic models based on Bessel functions. Meccanica 2017, 52, 825–832. [Google Scholar] [CrossRef]
- Garra, R.; Mainardi, F.; Spada, G. A generalization of the Lomnitz logarithmic creep law via Hadamard fractional calculus. Chaos Solitons Fractals 2017, 102, 333–338. [Google Scholar] [CrossRef]
- Giusti, A. On infinite order differential operators in fractional viscoelasticity. Fract. Calc. Appl. Anal. 2017, 20, 854–867. [Google Scholar] [CrossRef]
- Giusti, A.; Mainardi, F. A dynamic viscoelastic analogy for fluid-filled elastic tubes. Mecanica 2016, 51, 2321–2330. [Google Scholar] [CrossRef]
- Mainardi, F. Fractional Calculus: Some basic problems in continuum and statistical mechanics. In Fractals and Fractional Calculus in Continuum Mechanics; Carpinteri, A., Mainardi, F., Eds.; Springer: New York, NY, USA; Wien, Austria, 1997. [Google Scholar]
- Giusti, A. A comment on some new definitions of fractional derivative. arXiv, 2017; arXiv:1710.06852. [Google Scholar]
- Gorenflo, R.; Mainardi, F. Fractional Calculus: Integral and Differential Equations of Fractional Order. In Fractals and Fractional Calculus in Continuum Mechanics; Carpinteri, A., Mainardi, F., Eds.; Springer: New York, NY, USA; Wien, Austria, 1997. [Google Scholar]
- Mainardi, F. Fractional Calculus and Waves in Linear Viscoelasticity; Imperial College Press: London, UK, 2010. [Google Scholar]
- Gross, B. Mathematical Structure of the Theories of Viscoelasticity; Hermann & Cie: Paris, France, 1953. [Google Scholar]
- Molinari, A. Viscoélasticité linéaire et functions complétement monotones. Journal de Mécanique 1973, 12, 541–553. [Google Scholar]
- Mainardi, F.; Turchetti, G. Positivity constraints and approximation methods in linear viscoelasticity. Lettere al Nuovo Cimento 1979, 26, 38–40. [Google Scholar] [CrossRef]
- Hanyga, A. Wave propagation in linear viscoelastic media with completely monotonic relaxation moduli. Wave Motion 2013, 50, 909–928. [Google Scholar] [CrossRef]
- Giusti, A.; Colombaro, I. Prabhakar-like fractional viscoelasticity. Commun. Nonlinear Sci. Numer. Simul. 2018, 56, 138–143. [Google Scholar] [CrossRef]
- D’Ovidio, M.; Polito, F. Fractional Diffusion-Telegraph Equations and their Associated Stochastic Solutions. Teoriya Veroyatnostei i ee Primeneniya 2017, 62, 692–718. [Google Scholar] [CrossRef]
- Garra, R.; Gorenflo, R.; Polito, F.; Tomovski, Z. Hilfer-Prabhakar derivatives and some applications. Appl. Math. Comput. 2014, 242, 576–589. [Google Scholar] [CrossRef]
- Garra, R.; Garrappa, R. The Prabhakar or three parameter Mittag-Leffler function: Theory and application. Commun. Nonlinear Sci. Numer. Simul. 2018, 56, 314–329. [Google Scholar] [CrossRef]
- Gorenflo, R.; Kilbas, A.A.; Mainardi, F.; Rogosin, S.V. Mittag-Leffler Functions, Related Topics and Applications; Springer: Berlin, Germany, 2014. [Google Scholar]
- Paneva-Konovska, J. From Bessel to Multi-Index Mittag Leffler Functions: Enumerable Families, Series in Them and Convergence; World Scientific Publishing: London, UK, 2016. [Google Scholar]
- Prabhakar, T.R. A singular integral equation with a generalized Mittag Leffler function in the kernel. Yokohama Math. J. 1971, 19, 7–15. [Google Scholar]
- Capelas de Oliveira, E.; Mainardi, F.; Vaz, J., Jr. Models based on Mittag-Leffler functions for anomalous relaxation in dielectrics. Eur. Phys. J. Spec. Top. 2011, 193, 161–171. [Google Scholar] [CrossRef]
- Mainardi, F.; Garrappa, R. On complete monotonicity of the Prabhakar function and non-Debye relaxation in dielectrics. J. Comput. Phys. 2015, 293, 70–80. [Google Scholar] [CrossRef]
- Garrappa, R. Grünwald-Letnikov operators for fractional relaxation in Havriliak-Negami models. Commun. Nonlinear Sci. Numer. Simul. 2016, 38, 178–191. [Google Scholar] [CrossRef]
- Garrappa, R.; Mainardi, F.; Maione, G. Models of dielectric relaxation based on completely monotone functions. Fract. Calc. Appl. Anal. 2016, 19, 1105–1160. [Google Scholar] [CrossRef]
- Sandev, T. Generalized Langevin equation and the Prabhakar derivative. Mathematics 2017, 5, 66. [Google Scholar] [CrossRef]
- Hanyga, A.; Seredyńska, M. On a Mathematical Framework for the Constitutive Equations of Anisotropic Dielectric Relaxation. J. Stat. Phys. 2008, 131, 269–303. [Google Scholar] [CrossRef]
- Seredyńska, M.; Hanyga, A. Relaxation, dispersion, attenuation, and finite propagation speed in viscoelastic media. J. Math. Phys. 2010, 51, 092901. [Google Scholar] [CrossRef]
- Ding, X.; Zhang, G.; Zhao, B.; Wang, Y. Unexpected viscoelastic deformation of tight sandstone: Insights and predictions from the fractional Maxwell model. Sci. Rep. 2017, 7, 11336. [Google Scholar] [CrossRef] [PubMed]
- Borcherdt, R. Viscoelastic Waves in Layered Media; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Havriliak, S.; Negami, S. A complex plane representation of dielectric and mechanical relaxation processes in some polymers. Polymer 1967, 8, 161–210. [Google Scholar] [CrossRef]
- Giusti, A.; Mainardi, F. On infinite series concerning zeros of Bessel functions of the first kind. Eur. Phys. J. Plus. 2016, 131, 206–212. [Google Scholar] [CrossRef]
- Gross, B.; Fuoss, R. Ladder structures for representation of viscoelastic systems. J. Polym. Sci. 1956, 19, 39–50. [Google Scholar] [CrossRef]
- Knopoff, L. Q. Rev. Geophys. 1964, 2, 625–660. [Google Scholar] [CrossRef]
- Shito, A.; Karato, A.; Park, J. Frequency dependence of Q in Earth’s upper mantle inferred from continuous spectra of body waves. Geophys. Res. Lett. 2004, 31, L12603. [Google Scholar] [CrossRef]
- Carcione, J.; Cavallini, F.; Mainardi, F.; Hanyga, A. Time-domain modeling of constant-Q Seismic waves using fractional derivatives. Pure Appl. Geophys. 2002, 159, 1719–1736. [Google Scholar] [CrossRef]
- Kjartansson, E. Constant Q-wave propagation and attenuation. J. Geophys. Res. Solid Earth 1979, 84, 4737–4748. [Google Scholar] [CrossRef]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Colombaro, I.; Giusti, A.; Vitali, S. Storage and Dissipation of Energy in Prabhakar Viscoelasticity. Mathematics 2018, 6, 15. https://doi.org/10.3390/math6020015
Colombaro I, Giusti A, Vitali S. Storage and Dissipation of Energy in Prabhakar Viscoelasticity. Mathematics. 2018; 6(2):15. https://doi.org/10.3390/math6020015
Chicago/Turabian StyleColombaro, Ivano, Andrea Giusti, and Silvia Vitali. 2018. "Storage and Dissipation of Energy in Prabhakar Viscoelasticity" Mathematics 6, no. 2: 15. https://doi.org/10.3390/math6020015
APA StyleColombaro, I., Giusti, A., & Vitali, S. (2018). Storage and Dissipation of Energy in Prabhakar Viscoelasticity. Mathematics, 6(2), 15. https://doi.org/10.3390/math6020015