Digital Supply Chain through Dynamic Inventory and Smart Contracts

Abstract
:
1. Introduction
2. Technical Differences between Static and Dynamic Games
3. Characterization of the Static Game
3.1. Centralized Solution of the Static SC Game
3.2. Decentralized Solution of the Static SC Game
3.3. Comparison between Centralized and Decentralized Solution of the Static SC Game
4. Characterization of the Dynamic Game
4.1. Centralized Solution of the Dynamic SC Game
4.2. Decentralized Solution of the Dynamic SC Game
4.3. Comparison between Centralized and Decentralized Solutions of the Dynamic SC Game
5. Numerical Analysis
- The marginal production and purchasing costs, as well as the inventory costs, are the same; therefore, each player is indifferent with respect to producing or holding stocks.
- Nevertheless, by producing and purchasing, each player can reach the optimal production and purchasing quantity. This represents the optimal amount of goods to attain in order to exploit the economies of scale and minimizing the total production and purchasing costs. Also, those quantities are assumed equal for both players.
- The transferring price under RSC is equal to the production cost. The manufacturer does not increase his profit directly by selling but receives a compensating quota of the retailer’s income. The parameter describes that proportion.
6. Conclusions
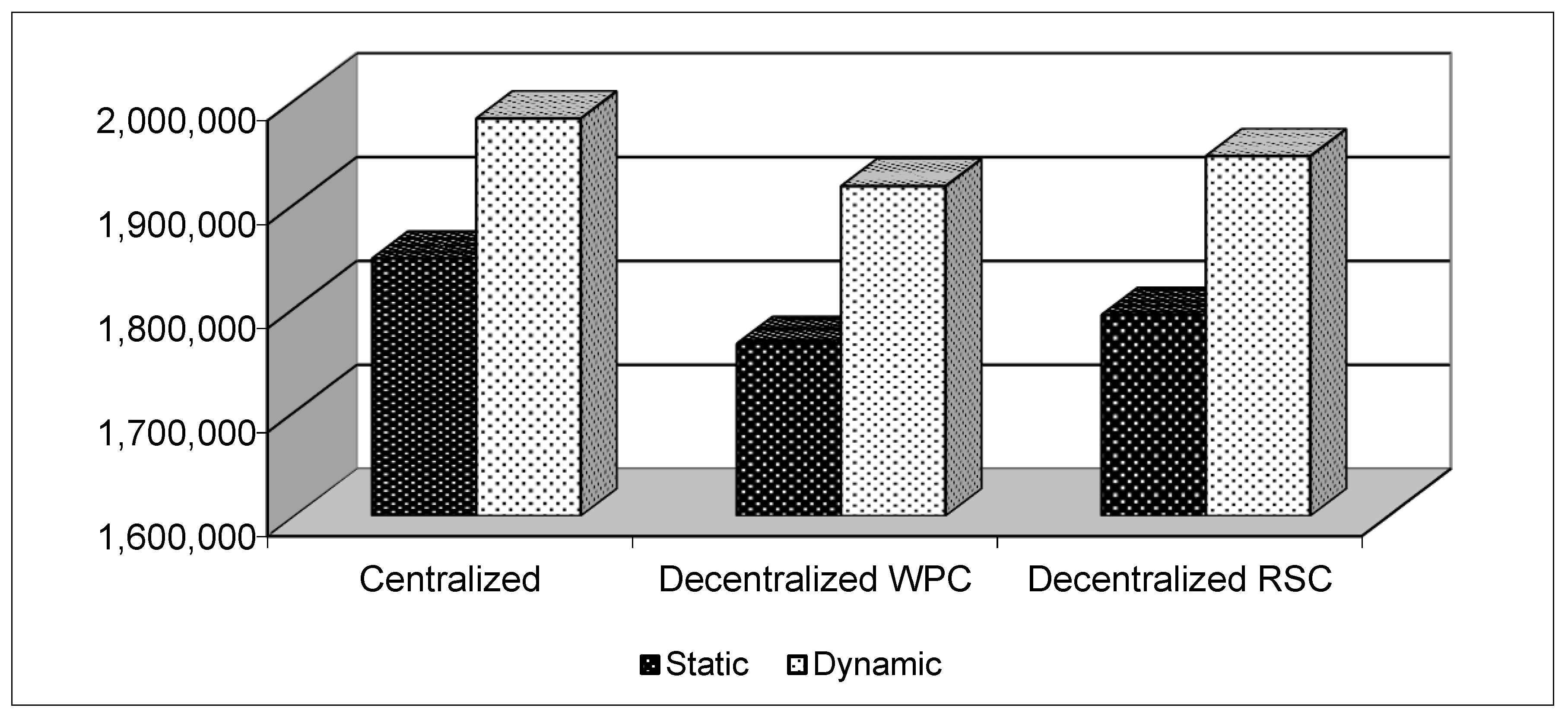
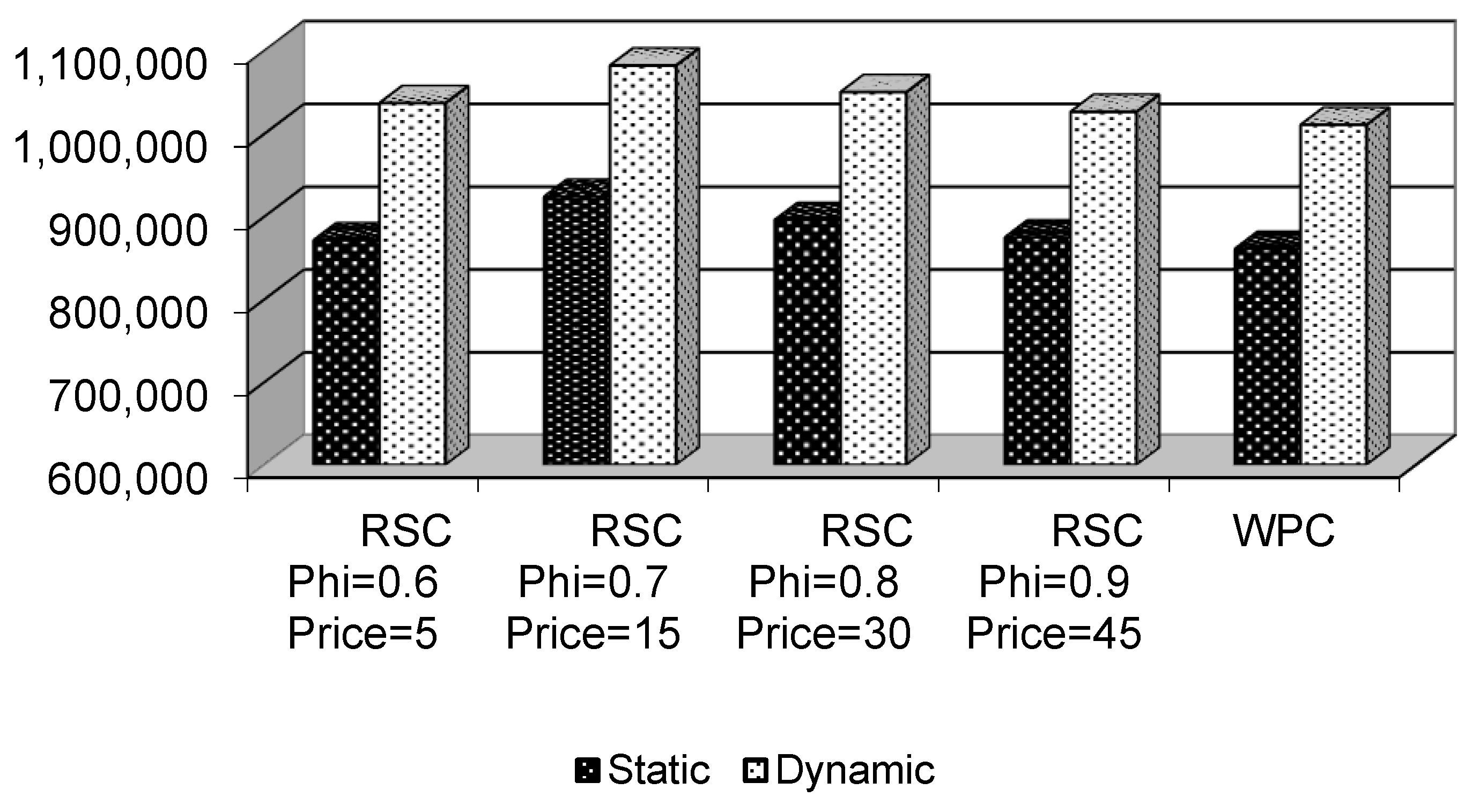
- While the existing contributions successfully assessed that the RSC is preferred to the WPC for coordinating SCs, this statement fails when comparing the WPC under dynamic settings with the RSC under static settings. In particular, the cumulative profits obtained by using WPC under dynamic settings result higher than those generated by implementing RSC under a static environment. Accordingly, SCs should be coordinated by simultaneously evaluating the contract schemes and the setting and converging toward an optimal decision. An artificial intelligence system, along with blockchain and big data, should be implemented according to these targets rather than as mere smart tools to write lines of orders.
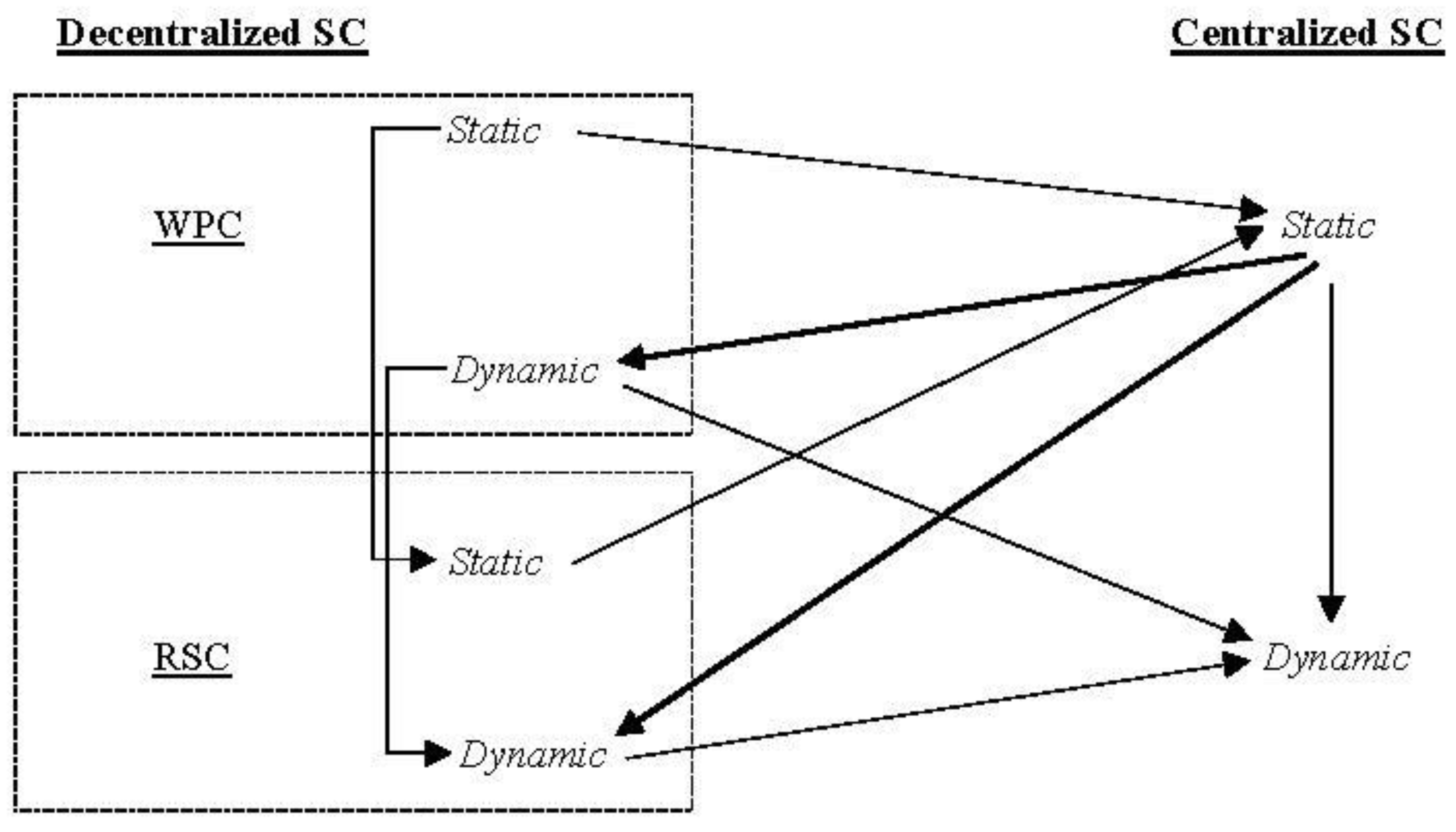
- Existing contributions clearly highlight the preference for the centralized SC to the decentralized one. We compare the cumulative profits finding that the decentralized SC under dynamic settings obtains higher profits than those obtained by the centralized SC under a static framework. This statement is true independent of the contract scheme adopted for SC coordination. This result suggests that the decision-maker cannot disregard the setting when choosing the SC configuration. Static and dynamic settings suggest an important innovation in the literature when evaluating centralized and decentralized SC compositions. Figure 6 reports the summary of our findings showing the convenience when going from one configuration to another. The bold arrows reflect the innovation due to this research, while the others concern the results already known and well established in the literature and confirmed here.
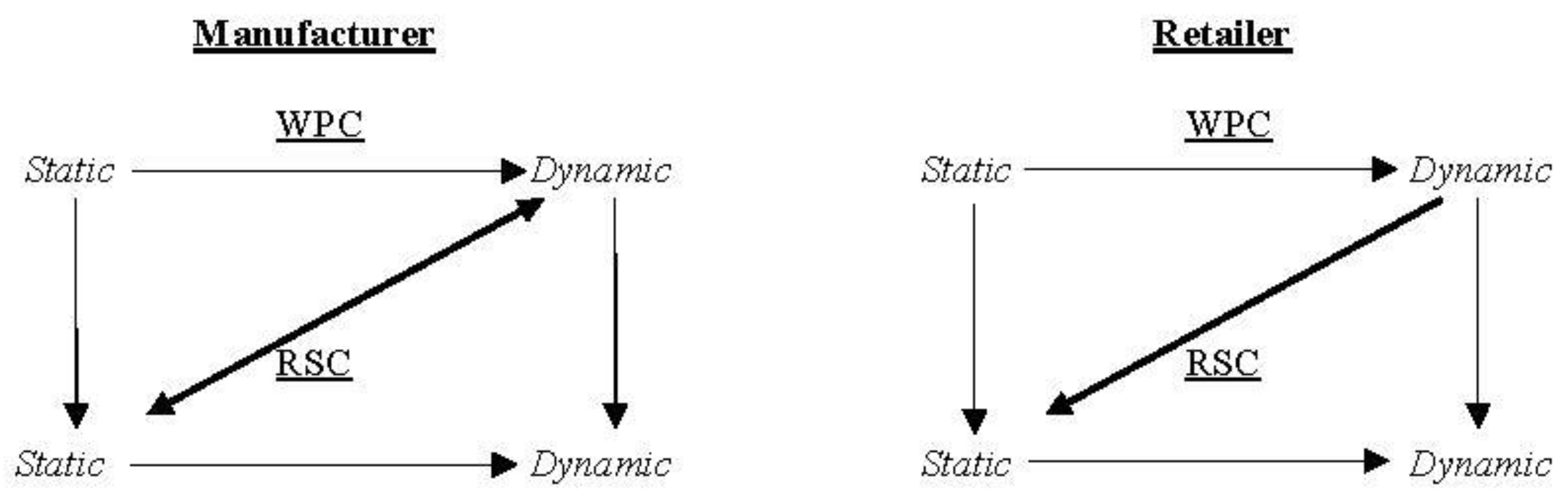
- The choice of the sharing parameter and the transferring price w determines the convenience for each player in adopting one configuration rather than another. This is particularly true for the manufacturer. When is low enough and the transferring price is equal to the marginal production cost, the RSC totally mitigates the double marginalization effect, and it is found to always be highly preferred with respect to the WPC. When the values (, w) change, the results are not obvious. The smart contracts that firms use should aim at searching for the optimal combinations of these two parameters to make SCs better off with digitalization. Our findings suggest that, beyond the choice of setting, the adequate combination of the parameters (, w) plays an important role in choosing the optimal configuration for maximizing the manufacturer’s cumulative profit.
- Finally, the choice of the parameters (, w) substantially influences the retailer’s cumulative profits. Nevertheless, the retailer shows more stable and interesting results with respect to the comparison between static and dynamic settings. The implementation of the RSC is always preferred to the WPC for the higher cumulative profits generated by each combination of (, w). Notwithstanding, this result is true as long as the comparison between the two contract schemes uses the same settings. When evaluating the results of the WPC under dynamic settings with the RSC under static settings, the previous statement fails for each combination of (, w) used in the sensitivity analysis. The retailer incurs higher economic benefits by adopting WPC in dynamic settings than RSC in static settings. This result introduces a novelty in the literature. When coordinating the SC, the choice of the setting matters considerably, and the adoption of the contract scheme depends on the selection of the setting. Figure 7 reports the summary of the firms’ convenience in shifting from one configuration to another. While the results concerning the retailer are quite stable and clear, the choice of the parameters (, w) impacts the manufacturer’s decisions, which is the leading firm in terms of implementing an artificial intelligence system. Non-bold arrows illustrate the well-assessed findings in the literature, while the findings of this paper are shown in bold. Bold and double arrows represent the relationships that need further future investigations, as the results obtained are not at all definitive.
Funding
Conflicts of Interest
References
- Mentzer, J.T.; DeWitt, W.; Keebler, J.S.; Min, S.; Nix, N.W.; Smith, C.D.; Zacharia, Z.G. Defining supply chain management. J. Bus. Logist. 2001, 1, 1–25. [Google Scholar] [CrossRef]
- Kogan, K.; Tapiero, C. Supply Chain Games: Operations Management and Risk Evaluation; Springer Series in Operation Research; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- De Giovanni, P.; Ramani, V. Product cannibalization and the effect of a service strategy. J. Oper. Res. Soc. 2018, 69, 340–357. [Google Scholar] [CrossRef]
- Ramani, V.; De Giovanni, P. A two-period model of product cannibalization in an atypical Closed-loop Supply Chain with endogenous returns: The case of DellReconnect. Eur. J. Oper. Res. 2017, 262, 1009–1027. [Google Scholar] [CrossRef]
- Jeuland, A.P.; Shugan, S.M. Managing Channel Pro.ts. Mark. Sci. 1983, 2, 239–272. [Google Scholar] [CrossRef]
- Jørgensen, S. Optimal production, purchasing and pricing: A differential game approach. Eur. J. Oper. Res. 1986, 24, 64–76. [Google Scholar] [CrossRef]
- Sethi, S.P. Dynamic Optimal Control models in advertising: A survey. SIAM Rev. 1977, 19, 685–725. [Google Scholar] [CrossRef]
- Feichtinger, G.; Hartel, R.F.; Sethi, S.P. Dynamic optimal control models in advertising: Recent developments. Manag. Sci. 1994, 40, 29–31. [Google Scholar] [CrossRef]
- Dockner, E.; Jørgensen, S.; Long, N.V.; Sorger, G. Differential Games in Economics and Management Science; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Erickson, G.M. Differential game models of advertising competition. Eur. J. Oper. Res. 1995, 83, 431–438. [Google Scholar] [CrossRef]
- Erickson, G.M. Empirical analysis of closed-loop duopoly advertising strategies. Manag. Sci. 1992, 38, 1732–1749. [Google Scholar] [CrossRef]
- He, X.; Prasad, A.; Sethi, S.; Gutierrez, G. A Survey of Stackelberg Differential Game Models in Supply and Marketing Channels. J. Syst. Sci. Syst. Eng. 2007, 16, 385–413. [Google Scholar] [CrossRef]
- Jørgensen, S.; Zaccour, G. Differential Games in Marketing, International Series in Quantitative Marketing; Kluwer Academic Publishers: Boston, UK, 2004. [Google Scholar]
- Taboubi, S.; Zaccour, G. Coordination Mechanisms in Marketing Channels: A Survey of Game Theory Models; Cahier du GERAD, G-2005-36; GERAD: Montreal, QC, Canada, 2005. [Google Scholar]
- De Giovanni, P. Digital Supply Chain, Design Quality and Circular Economy, in Dynamic Supply Chain Quality Models in Digital Transformation; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- De Giovanni, P. A joint maximization incentive in closed-loop supply chains with competing retailers: The case of spent-battery recycling. Eur. J. Oper. Res. 2018, 268, 128–147. [Google Scholar] [CrossRef]
- De Giovanni, P. Coordination in a distribution channel with decisions on the nature of incentives and share-dependency on pricing. J. Oper. Res. Soc. 2016, 67, 1034–1049. [Google Scholar] [CrossRef]
- De Giovanni, P.; Zaccour, G. Optimal quality improvements and pricing strategies with active and passive product returns. Omega 2019, 88, 248–262. [Google Scholar] [CrossRef]
- Cachon, G.; Netessine, S. Game theory in Supply Chain Analysis. In Handbook of Quantitative Supply Chain Analysis: Modeling in the eBusiness Era; David Simchi-Levi, S., Wu, D., Shen, Z., Eds.; Kluwer: Alphen aan den Rijn, The Netherlands, 2004. [Google Scholar]
- Taylor, T.A. Supply chain coordination under channel rebates with sales effort effects. Manag. Sci. 2002, 48, 992–1007. [Google Scholar] [CrossRef] [Green Version]
- Cachon, G.P.; Lariviere, M.A. Supply Chain coordination with revenues sharing contracts: Strength and limitations. Manag. Sci. 2005, 51, 30–44. [Google Scholar] [CrossRef] [Green Version]
- Tsay, A.A. The quantity flexibility contract and supplier-customer incentives. Manag. Sci. 1999, 45, 1339–1358. [Google Scholar] [CrossRef]
- De Giovanni, P. An optimal control model with defective products and goodwill damages. Ann. Oper. Res. 2019, 1–12. Available online: https://link.springer.com/article/10.1007/s10479-019-03176-4 (accessed on 1 October 2019).
- De Giovanni, P. Eco-Digital Supply Chain through Blockchains. In Proceedings of the 9th International Conference on Advanced in Social Science, Economics and Management Study, Rome, Italy, 7–8 December 2019. [Google Scholar]
- Zaccour, G. On the Coordination of Dynamic Marketing Channels and Two-Part Tariffs. Automatica 2008, 44, 1233–1239. [Google Scholar] [CrossRef]
- De Giovanni, P.; Karray, S.; Martín-Herrán, G. Vendor Management Inventory with consignment contracts and the benefits of cooperative advertising. Eur. J. Oper. Res. 2019, 272, 465–480. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; De Giovanni, P. Green Process Innovation Through Industry 4.0 Technologies and Supply Chain Coordination. Ann. Oper. Res. 2020, 1, 1–32. [Google Scholar]
- Wang, G.; Gunasekaran, A.; Ngai, E.W.; Papadopoulos, T. Big data analytics in logistics and supply chain management: Certain investigations for research and applications. Int. J. Prod. Econ. 2016, 176, 98–110. [Google Scholar] [CrossRef]
- Jørgensen, S. A survey of some differential games in advertising. J. Econ. Dyn. Control 1982, 4, 341–369. [Google Scholar] [CrossRef]
- Genc, T.S.; De Giovanni, P. Optimal return and rebate mechanism in a closed-loop supply chain game. Eur. J. Oper. Res. 2018, 269, 661–681. [Google Scholar] [CrossRef] [Green Version]
- Spengler, J. Vertical integration and antitrust policy. J. Political Econ. 1950, 58, 347–352. [Google Scholar] [CrossRef]
- Chalikias, M.; Skordoulis, M. Implementation of FW Lanchester’s combat model in a supply chain in duopoly: The case of Coca-Cola and Pepsi in Greece. Oper. Res. 2017, 17, 737–745. [Google Scholar]
- Preeker, T.; De Giovanni, P. Coordinating innovation projects with high tech suppliers through contracts. Res. Policy 2018, 47, 1161–1172. [Google Scholar] [CrossRef]
- De Giovanni, P.; Zaccour, G. A selective survey of game-theoretic models of closed-loop supply chains. 4OR 2019, 17, 1–44. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Static | Dynamic | |
|---|---|---|
| Planning horizon | One-shot game (t = 1) | The games have starting (t0) and ending (t) periods, or are even infinite |
| Types of games | Cooperative and non-cooperative | Cooperative and non-cooperative over open- and closed-loop frameworks |
| Mathematical computations required | System of first-order conditions | System of ordinary (partial) differential equations in open (closed)-loop games |
| Equilibrium | Best response function | Optimal control variable |
| General objective | Player payoff maximization according to the best response function | Player payoff maximization according to the optimal control variable and the optimal trajectory of the state variables |
| a | b | hm | hr | cm | cr | pWPC | pRSC | T | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1000 | 20 | 0.6 | 5 | 5 | 100 | 100 | 5 | 5 | 70 | 5 | 100 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Giovanni, P. Digital Supply Chain through Dynamic Inventory and Smart Contracts. Mathematics 2019, 7, 1235. https://doi.org/10.3390/math7121235
De Giovanni P. Digital Supply Chain through Dynamic Inventory and Smart Contracts. Mathematics. 2019; 7(12):1235. https://doi.org/10.3390/math7121235
Chicago/Turabian StyleDe Giovanni, Pietro. 2019. "Digital Supply Chain through Dynamic Inventory and Smart Contracts" Mathematics 7, no. 12: 1235. https://doi.org/10.3390/math7121235
APA StyleDe Giovanni, P. (2019). Digital Supply Chain through Dynamic Inventory and Smart Contracts. Mathematics, 7(12), 1235. https://doi.org/10.3390/math7121235