1. Introduction
Singular systems are more convenient than regular ones for describing many practical systems because a singular system involves both differential equations and algebraic equations. Applications of singular systems can be found in circuit systems, chemical systems, biological systems, robot systems, and power systems [
1]. Therefore, many scholars have paid attention to the study of singular systems, and a number of important results have been reported (see, e.g., [
2,
3,
4]).
As is known to all, a time delay frequently arises in practical systems and is often the cause of instability and poor performance. Hence, the stability problem for a singular system with a time delay has attracted many researchers’ attention in the past several decades (see, e.g., [
5,
6,
7,
8,
9,
10]).
In some real physical systems and industrial systems, disturbances that are attributable to external signals may cause instability and degrade the system’s performance. Hence, the effect of disturbances on the considered systems should be taken into account. Since H
control is used to keep systems less sensitive to disturbances, problems of H
control for time-delay systems have been widely explored, and findings related to these problems have been reported many times in the literature [
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25] as a result of their frequent applications in power systems, large-scale systems, and circuit systems. Recently, scholars (such as [
11,
12,
13,
14,
15]) have started to study the H
problem for singular time-delay systems by using a linear matrix inequality (
) approach, which yields not only the existence conditions valid for singular systems’ regular problems but also characterizations of H
controllers, leading to a convex optimization problem [
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29].
The robust H
control problem for uncertain singular time-delay systems was investigated by Ji et al. in [
24], where the
condition was obtained by constructing a degenerate Lyapunov function on the basis of [
23]. However, the condition does not satisfy
, which renders the design procedure of the LMI law comparatively untenable. Moreover, the problem for singular neutral time-delay systems was not investigated in [
24], and some information about the condition itself cannot be revealed even if the method can be applied to a singular neural time-delay system. Also, because of the continuity of the function, it is more difficult to study the neural time-delay system than it is to study singular time-delay systems. Consequently, it is of more theoretical and practical significance to study singular neutral time-delay systems as compared with time-delay systems.
The present paper derives a sufficient condition for the existence of the H controller on the basis of the approach combined with a class of novel augmented Lyapunov functions, which thus facilitate the attainment of the H controller using the Matlab toolbox combined with a matrix equation.
2. Problem Statement and Preliminaries
Consider the following uncertain singular neutral time-delay system:
where
is the state vector;
is the control input vector;
is the disturbance input vector belonging to
;
is the control output vector;
is a constant time delay;
is a vector-valued initial function belonging to
are constant matrices with appropriate dimensions, where
E may be singular and is assumed to be
; and
are unknown matrices representing time-varying parameter uncertainties and can be described as
where
G and
are known constant matrices and
is a known matrix with Lebesgue measurable elements and satisfies
It is assumed in the present paper that for the arbitrary positive-definite matrix .
The parametric uncertainties are said to be admissible if Equations (2) and (3) both hold.
Next is a discussion of the system in Equation (
1) with no force counterpart item. First, the system is described as Equation (
4),
The following definitions and lemmas are very useful for deriving the main results of this paper.
Definition 1 ([
1])
. The pair (E, A) is known as regular if is not identically zero. The pair is known as impulse free if . Definition 2 ([
24])
. The singular neutral time-delay system (Equation (4)) is known as regular and impulse free if the pair is regular and impulse free. Remark 1. The regularity and impulses of the pair ensure the system (Equation (4)) with to be regular and impulse free, and they further ensure the existence of a unique solution to the system in Equation (4) on Since
is regular and impulse free, there exist two nonsingular matrices
Q and
P such that the system in Equation (
4) is equivalent to
with the coordinate transformation
and
where
Obviously, the system in Equation (
5) has a unique solution on
.
Definition 3 ([
29])
. If a matrix X satisfies the Penrose condition , then there exists a solution to the generalized inverse for or inverse of A, and thus, the matrix X is denoted by X = A or X , where denotes the set of all inverse of A. Lemma 1 ([
24])
. For a given symmetry matrix , where have appropriate dimensions, . Then, the following two conditions are equivalent. Lemma 2 ([
18])
. For any , the inequality holds. Therefore, Lemma 3 can be obtained by using a method similar to that in J. Lee (1994).
Lemma 3. For given matrices , and F of appropriate dimensions,for all F satisfies if there exist positive numbers such that Proof. By Lemma 2, for
there exists an
such that
hold simultaneously. Thus,
can be obtained. Similarly, there exist positive numbers
such that the following inequalities also hold
□
Lemma 4 ([
29])
. Let A∈ C, B∈ C, D∈ C . Then, the matrix equation is consistent if and only if, for some A and B, is satisfied, in which case the general solution is for arbitrary Y ∈ C . Robustcontrol problem. The present paper attempts to address the robust
control problem by considering the linear state feedback control law as
to construct
K such that
in Equation
will
stabilize the resultant closed-loop system and
guarantee the performance under the zero-initial condition of and for any nonzero and for all admissible parameter uncertainties satisfying Equations and .
3. Results
In the following, the problem of robust control is considered for the singular neutral system in Equation with and .
Theorem 1. Consider the system in Equation with and . For a given scalar , the system in Equation is regular, impulse free, and stable, and the norm from to is less than γ, if there exist symmetric positive-definite matrices and matrices such that the following linear matrix inequality holds:where
and is any matrix that has full column rank and satisfies .
Proof. The nonlinear singular system (Equation
) is proved below to be regular and impulse free. Since
rank(E) = r , there exist two nonsingular matrices
F and
G such that
Then, V can be parameterized as
where
is any nonsingular matrix. Next,
can be defined. Since
and
, the following inequality can be formulated easily:
.
Pre- and post-multiplying
by
F and
F, respectively, yields
From [
17], the following matrix inequalities can be formulated easily:
and thus,
is nonsingular.
Then, it can be proved that
which implies that
is not identically zero and
. Then, the pair
is regular and impulse free, which implies that the system in Equation (
1) is regular and impulse free.
In the following, the system in Equation
with
and
is proved to be asymptotical with the condition of
and an
performance under the zero-initial condition of
and
for any nonzero
. Construct a Lyapunov–Krasovskii function candidate as follows:
where
P , Q , R , and L . From this follows the derivation of
with respect to
t along the trajectory of the system in Equation
with the condition of
and
that
For the system in Equation
, the following holds
where
For
, it can be deduced that
where
S is any matrix with appropriate dimensions.
Noting the zero-initial condition of
,
, and
, then
By substituting Equations
and
into
, the following can be obtained:
where
, with
.
If
, there exists a scalar
such that
; thus, according to [
3], the system in Equation
with
and
is asymptotically stable. By Lemma 1,
is equivalent to
.
It is easy to obtain from the result of Theorem 1 the following conclusion about the performance analysis. □
Theorem 2. Consider the system in Equation with . For a given scalar , the system is regular, impulse free, and stable, and the norm from to is less than γ if there exist symmetric positive-definite matrices P, Q, R, L and matrices , and such that the following linear matrix inequality holds:where is as defined in Theorem 1. Proof. It follows from Equation
by Lemma 1 that
where
is as defined in Theorem 1, and
.
It follows from Equation
by Lemma 3 that
where
and is any matrix that has full column rank and satisfies .
In the following, the robust synthesis problem of the system in Equation is to be considered for the system in Equation with . □
Theorem 3. Consider the system in Equation (1) with . For a given scalar , if there exist symmetric positive-definite the matrices and matrices such that the matrix equation and the linear matrix inequality in the following hold simultaneously,then, the control law(where Y is an arbitrary matrix of appropriate dimension, I is a unit matrix, is any matrix with full column rank and satisfies , and ) stabilizes the singular neutral system and guarantees the norm bound within γ in the closed-loop system. Proof. Substituting the state feedback control law
into the system in Equation
with
, the closed-loop system
can be obtained. Since
, the pair
is the same as the pair
in that they are both regular and impulse free. Therefore, the solutions of
are equivalent to the solutions of
. According to the definition the
norm, the
norm of the system in Equation
can be given as
which is equal to
Hence, it can be shown that the regularity, impulse-free state, asymptotic stability, and
performance of the system in Equation
are equivalent to the following system regularity, impulse-free state, asymptotic stability, and
performance; that is,
Then, by replacing
A by (A+BK)
,
by
,
D by
,
E by
,
C by
in Equation (
7) and setting
, Matrix Equation (
17) and Linear Matrix Inequality (18) can be directly obtained.
Now, the result for the problem of robust
control for the system in Equation (
1) is given. According to Theorem 3, the robust
performance of the system (Equation
) will be stated as follows. □
Theorem 4. Consider the uncertain singular neutral time-delay system (Equation (1)). For a given scalar , if there exist symmetric positive-definite matrices and matrices and such that the matrix equation and the linear matrix inequality in the following hold simultaneously,where then the control lawwhere Y is an arbitrary matrix of appropriate dimension, I is a unit matrix, is any matrix with full column rank and satisfies
stabilizes the uncertain singular neutral system and guarantees the norm bound within γ in the closed-loop system.
Proof. By replacing
A by
,
by
,
B by
, and
C by
in Theorem 3, the following matrix inequality can be obtained.
where
is as defined in Equation
, and
By Lemma 3, it can be proved that the inequality above is satisfied if there exist scalars
, and
such that
which is equal to Equation (
21) under the condition of Equation (
20). □
4. Numerical Illustration
The following numerical example is presented to illustrate the usefulness of the proposed theoretical results.
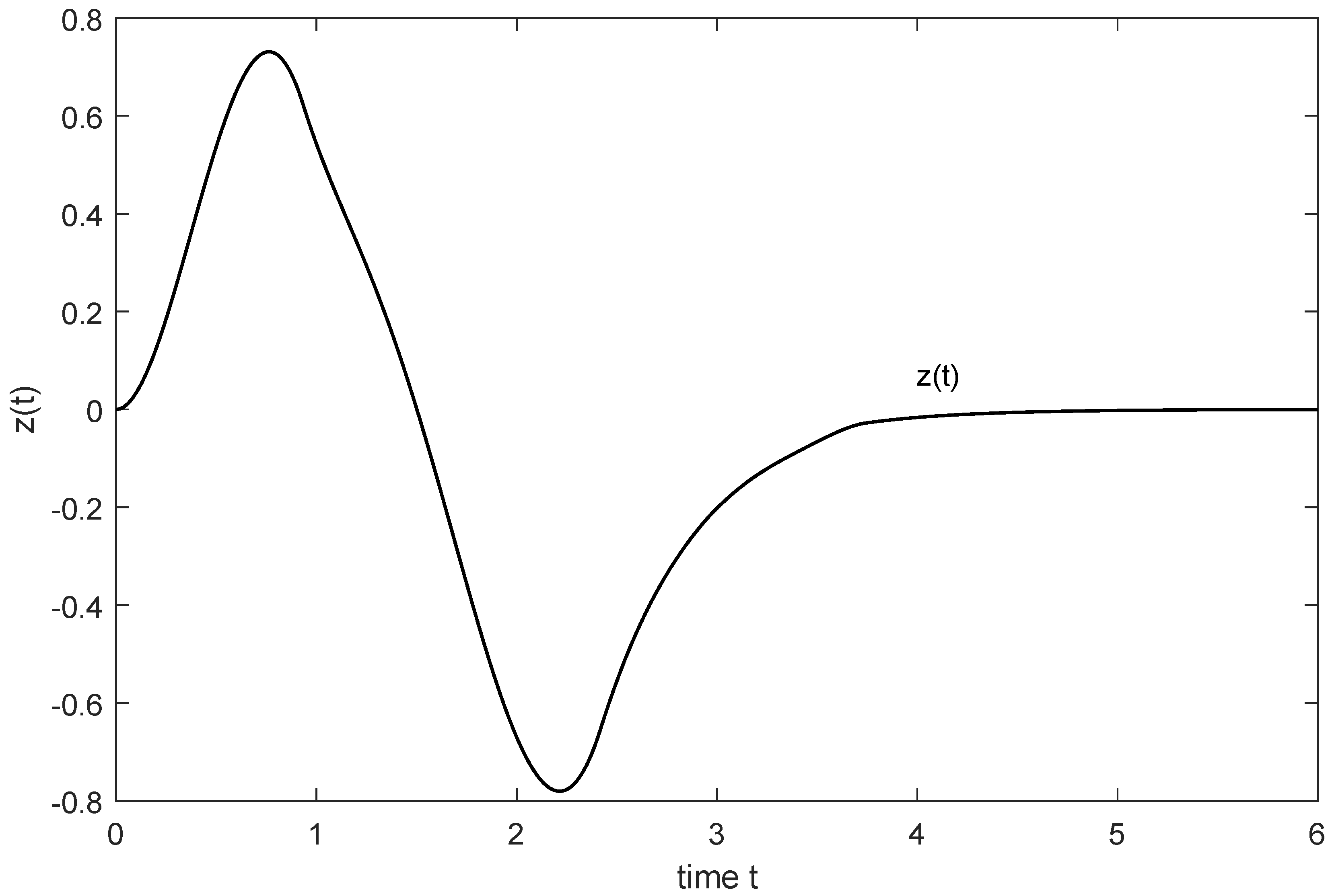
Example 1. Consider the system in Equation (1) with the parameter matrices as follows: , . , , . Let . By using Theorem 4 and the Matlab LMI Toolbox, the gain matrices can be designed as .
With the zero-initial condition and the parameters given above,
Figure 1 gives the simulations for the trajectory
of the system in Equation (
1) under the control law in Theorem 4.
Figure 1 demonstrates the effectiveness of the proposed control method.
5. Conclusions
The problem of robust
control for an uncertain singular neutral system is investigated. A new approach is introduced in order to ensure the singular system (Equation
) is regular and impulse free. On that basis, the matrix equation and an
ensure that the system, which is asymptotic and guarantees the
norm bound within
in the closed-loop system for all admissible parameter uncertainties, can be obtained. The needed controller can be constructed by solving the matrix equation and the
. It should be emphasized that the controller has a generalized inverse form, which is different from the result of [
17]. Also, this method can be applied to some practical systems.



{kind=link}
