Nonlinear Operators as Concerns Convex Programming and Applied to Signal Processing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- The mapping is called Lipschitz, , if
- The mapping is called nonexpansive if
- The mapping is called quasi-nonexpansive if and
3. Main Results
| Algorithm 1: Three-step sunny nonexpansive retraction |
 |
- (i)
- is in a closed convex bounded set where λ is a constant in such that
- (ii)
- If is uniformly continuous, then and
- (iii)
- If fulfills the Opial’s condition and and are demiclosed at then converges weakly to an element of
- (i)
- is in a closed convex bounded set where λ is a constant in such that
- (ii)
- and
- (iii)
- If fulfills the Opial’s condition, then converges weakly to an element of
4. Applications
4.1. Common Zeros of Accretive Operators
- (i)
- is in a closed convex bounded set where λ is a constant in such that
- (ii)
- and
- (iii)
- converges weakly to an element of
4.2. Convexly Constrained Least Square Problem
- (i)
- b solves the following problem:
- (ii)
- (iii)
- for all
- (i)
- is in the closed ball where λ is a constant in such that
- (ii)
- and
- (iii)
- converges weakly to an element of
4.3. Convex Minimization Problem
- (i)
- is in the closed ball where λ is a constant in such that
- (ii)
- and
- (iii)
- converges weakly to an element of
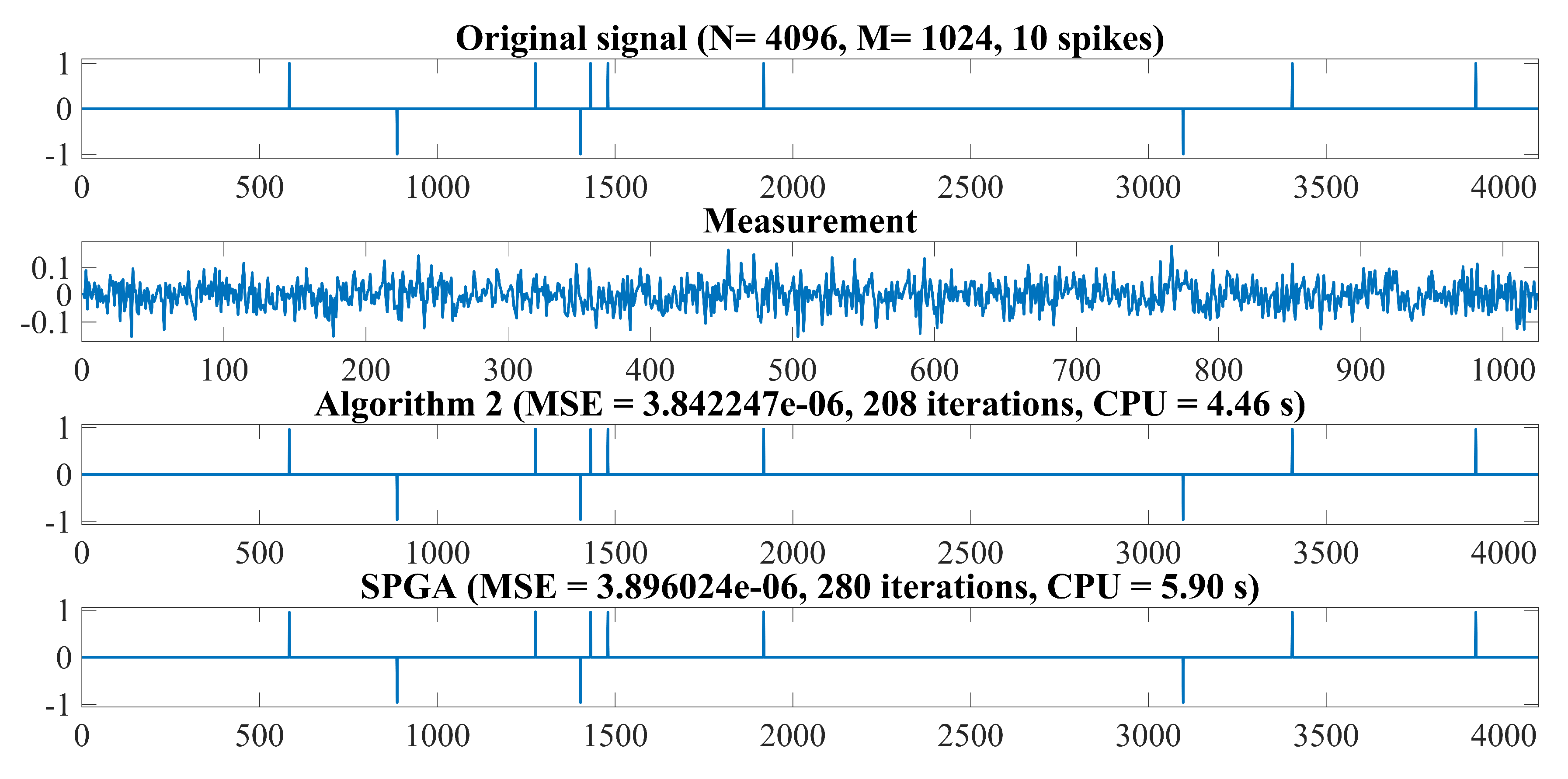
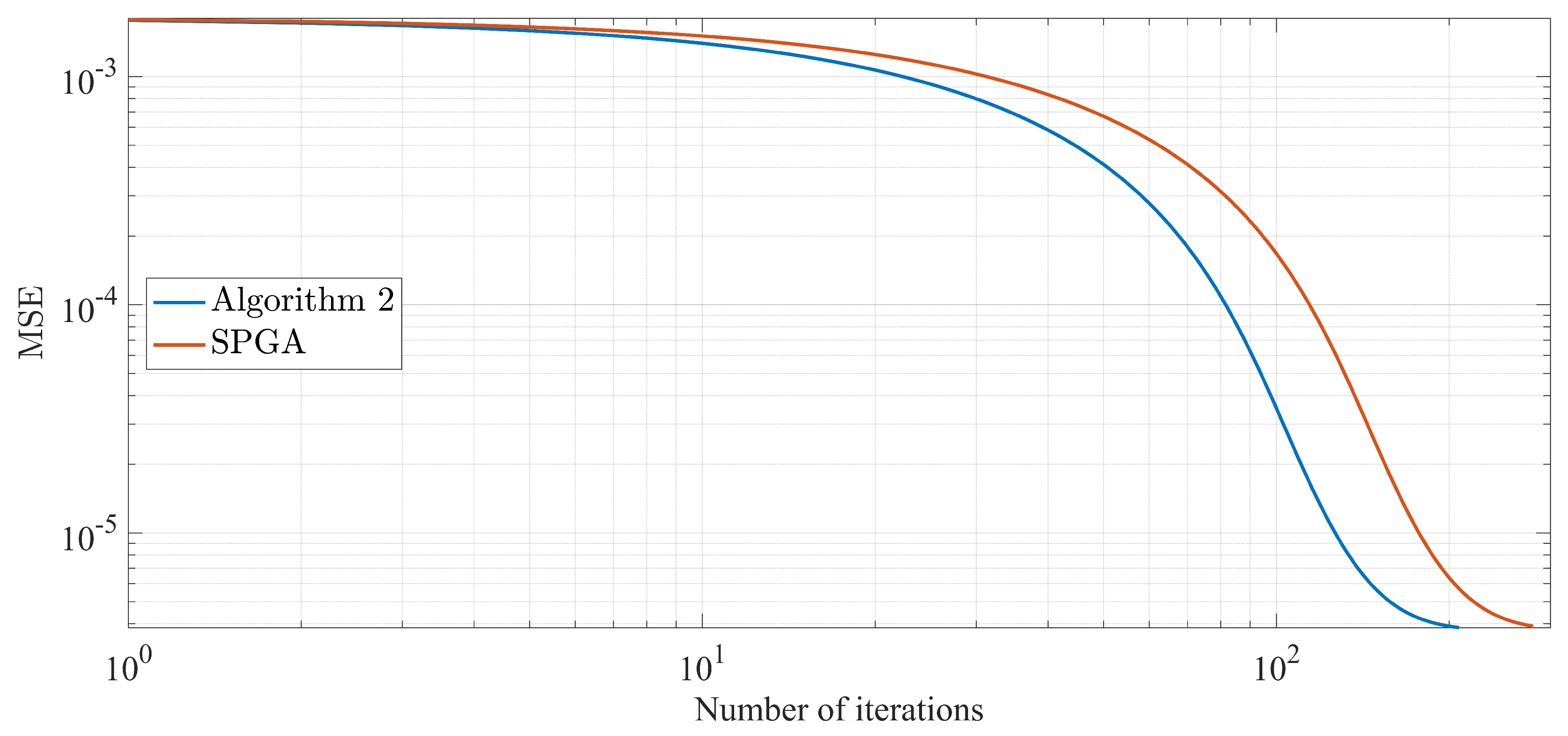
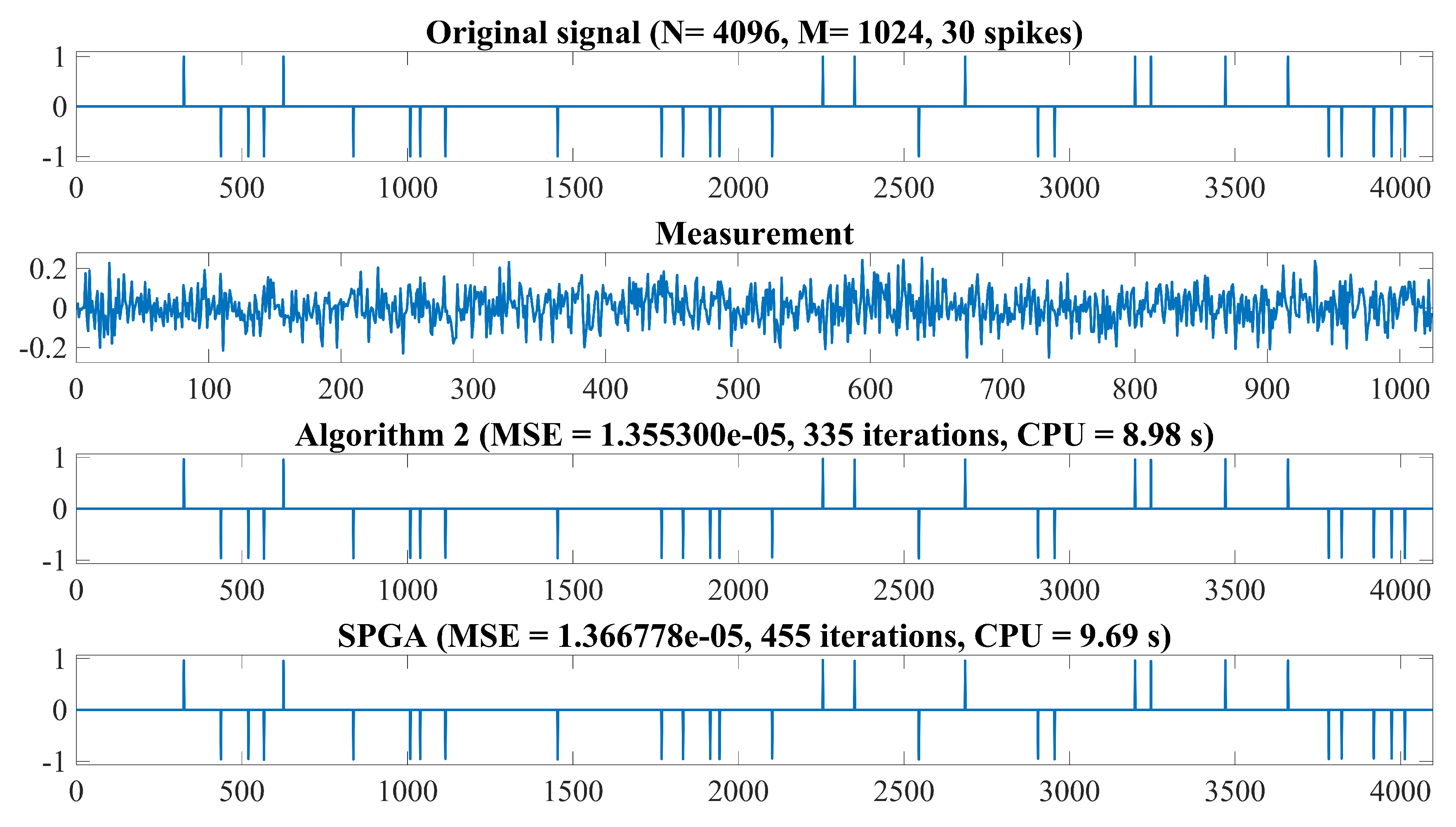
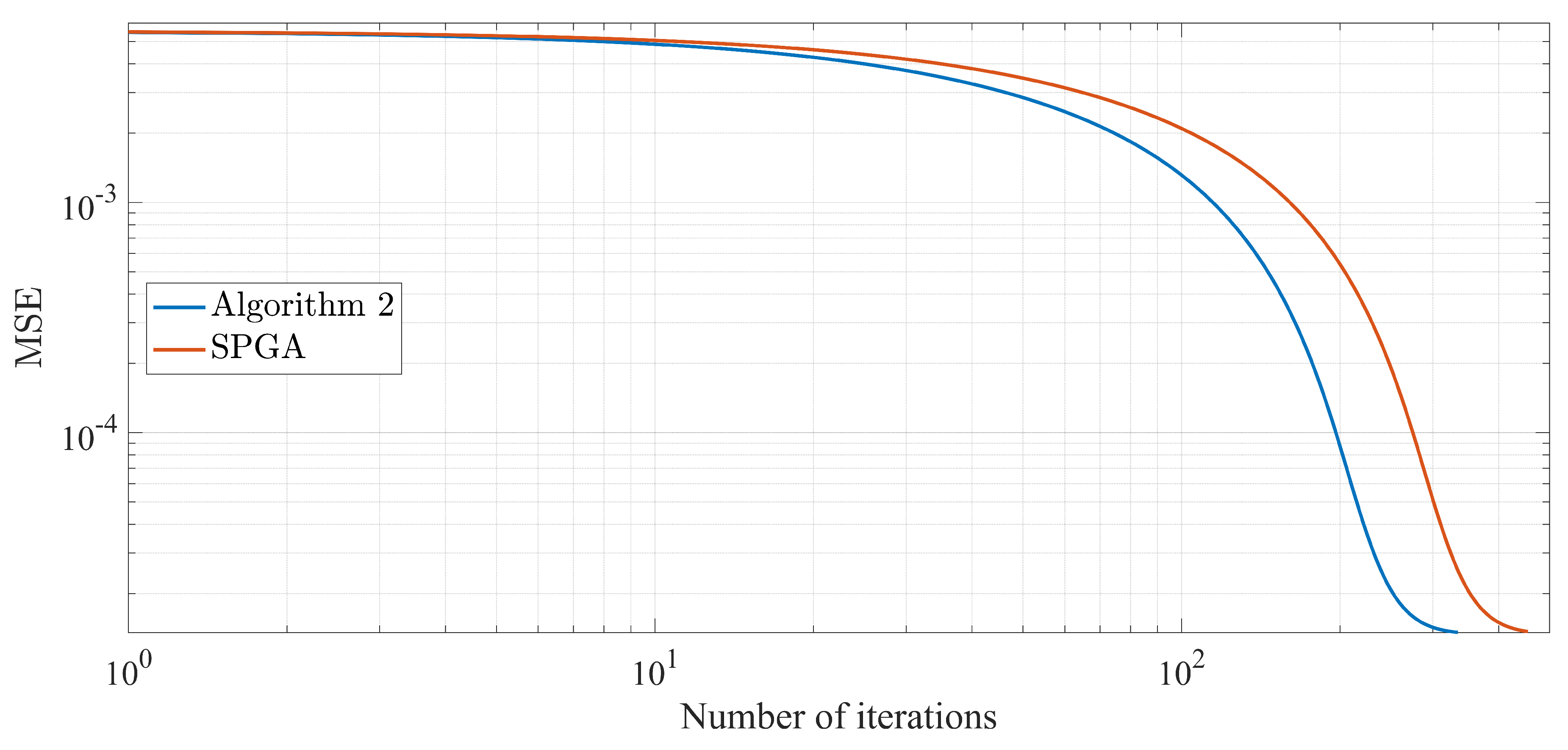
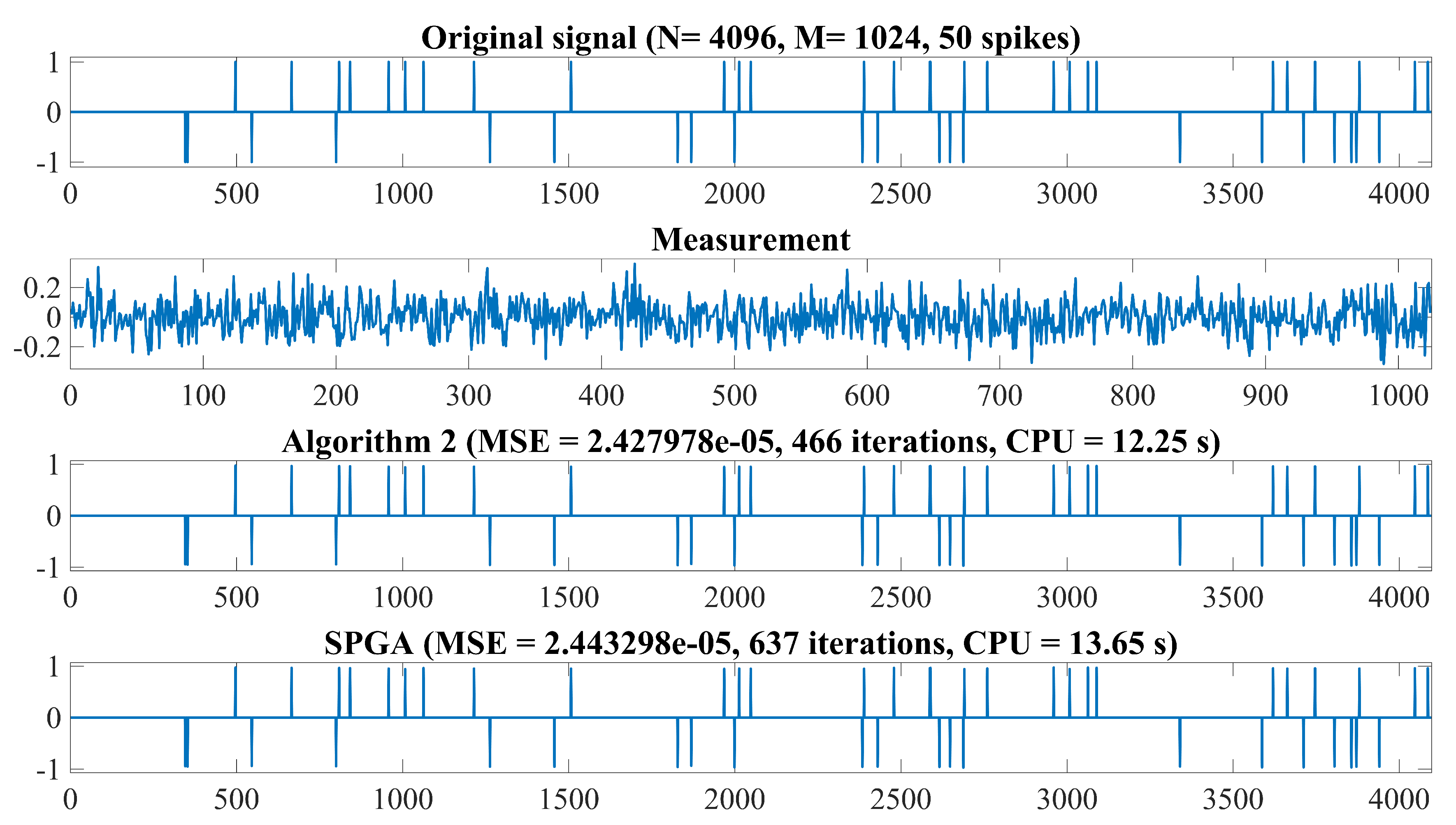
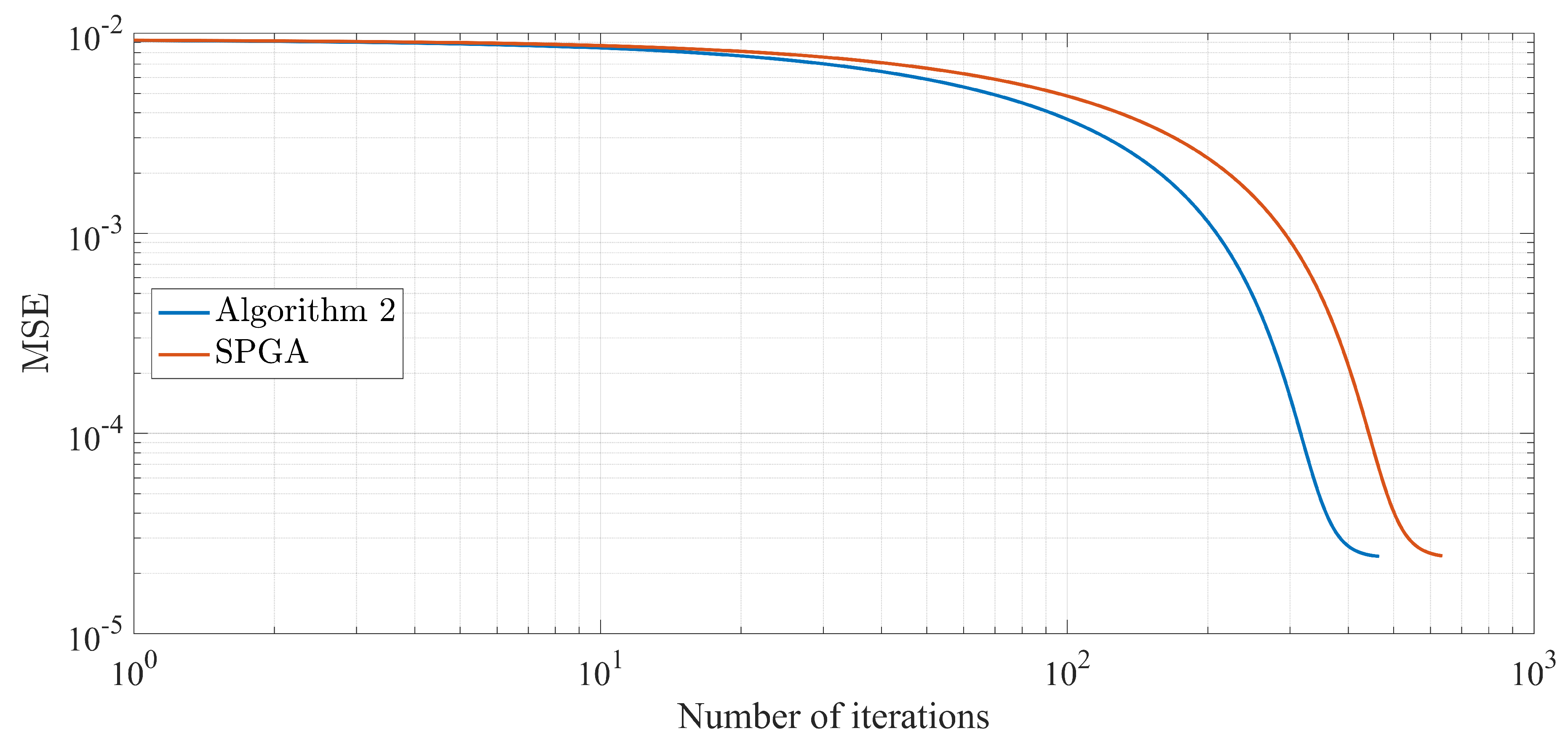
4.4. Signal Processing
| Algorithm 2: Three-step forward-backward operator |
 |
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Symbols | Display |
| lower semicontinuous, convex | |
| the set of all bounded and linear operators from into itself | |
| real uniformly convex |
References
- Kankam, K.; Pholasa, N.; Cholamjiak, P. On convergence and complexity of the modified forward–backward method involving new linesearches for convex minimization. Math. Meth. Appl. Sci. 2019, 42, 1352–1362. [Google Scholar] [CrossRef]
- Candès, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Suantai, S.; Kesornprom, S.; Cholamjiak, P. A new hybrid CQ algorithm for the split feasibility problem in Hilbert spaces and Its applications to compressed Sensing. Mathematics 2019, 7, 789. [Google Scholar] [CrossRef]
- Kitkuan, D.; Kumam, P.; Padcharoen, A.; Kumam, W.; Thounthong, P. Algorithms for zeros of two accretive operators for solving convex minimization problems and its application to image restoration problems. J. Comput. Appl. Math. 2019, 354, 471–495. [Google Scholar] [CrossRef]
- Padcharoen, A.; Kumam, P.; Cho, Y.J. Split common fixed point problems for demicontractive operators. Numer. Algorithms 2019, 82, 297–320. [Google Scholar] [CrossRef]
- Cholamjiak, P.; Shehu, Y. Inertial forward-backward splitting method in Banach spaces with application to compressed sensing. Appl. Math. 2019, 64, 409–435. [Google Scholar] [CrossRef]
- Jirakitpuwapat, W.; Kumam, P.; Cho, Y.J.; Sitthithakerngkiet, K. A general algorithm for the split common fixed point problem with its applications to signal processing. Mathematics 2019, 7, 226. [Google Scholar] [CrossRef]
- Combettes, P.L.; Wajs, V.R. Signal recovery by proximal forward–backward splitting. Multiscale Model Simul. 2005, 4, 1168–1200. [Google Scholar] [CrossRef]
- Picard, E. Memoire sur la theorie des equations aux d’erives partielles et la methode des approximations successives. J. Math Pures Appl. 1890, 231, 145–210. [Google Scholar]
- Mann, W.R. Mean value methods in iteration. Proc. Am. Math. Soc. 1953, 4, 506–510. [Google Scholar] [CrossRef]
- Ishikawa, S. Fixed points by a new iteration method. Proc. Am. Math. Soc. 1974, 44, 147–150. [Google Scholar] [CrossRef]
- Agarwal, R.P.; O’Regan, D.; Sahu, D.R. Iterative construction of fixed points of nearly asymptotically nonexpansive mappings. J. Nonlinear Convex Anal. 2007, 8, 61–79. [Google Scholar]
- Sahu, V.K.; Pathak, H.K.; Tiwari, R. Convergence theorems for new iteration scheme and comparison results. Aligarh Bull. Math. 2016, 35, 19–42. [Google Scholar]
- Thakur, B.S.; Thakur, D.; Postolache, M. New iteration scheme for approximating fixed point of non-expansive mappings. Filomat 2016, 30, 2711–2720. [Google Scholar] [CrossRef]
- Chang, S.S.; Wen, C.F.; Yao, J.C. Zero point problem of accretive operators in Banach spaces. Bull. Malays. Math. Sci. Soc. 2019, 42, 105–118. [Google Scholar] [CrossRef]
- Browder, F.E. Nonlinear mappings of nonexpansive and accretive type in Banach spaces. Bull. Am. Math. Soc. 1967, 73, 875–882. [Google Scholar] [CrossRef] [Green Version]
- Browder, F.E. Semicontractive and semiaccretive nonlinear mappings in Banach spaces. Bull. Am. Math. Soc. 1968, 7, 660–665. [Google Scholar] [CrossRef]
- Cioranescu, I. Geometry of Banach Spaces, Duality Mapping and Nonlinear Problems; Kluwer: Amsterdam, The Netherlands, 1990. [Google Scholar]
- Takahashi, W. Nonlinear Functional Analysis, Fixed Point Theory and Its Applications; Yokohama Publishers: Yokohama, Japan, 2000. [Google Scholar]
- Rockafellar, R.T. On the maximal monotonicity of subdifferential mappings. Pac. J. Math. 1970, 33, 209–216. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.K. Inequalities in Banach spaces with applications. Nonlinear Anal. 1991, 16, 1127–1138. [Google Scholar] [CrossRef]
- Opial, Z. Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Am. Math. Soc. 1967, 73, 591–597. [Google Scholar] [CrossRef] [Green Version]
- Sahu, D.R.; Pitea, A.; Verma, M. A new iteration technique for nonlinear operators as concerns convex programming and feasibility problems. Numer. Algorithms 2019. [Google Scholar] [CrossRef]
- Goebel, K.; Reich, S. Uniform Convexity, Hyperbolic Geometry and Non Expansive Mappings; Marcel Dekker: New York, NY, USA; Basel, Switzerland, 1984. [Google Scholar]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Padcharoen, A.; Sukprasert, P. Nonlinear Operators as Concerns Convex Programming and Applied to Signal Processing. Mathematics 2019, 7, 866. https://doi.org/10.3390/math7090866
Padcharoen A, Sukprasert P. Nonlinear Operators as Concerns Convex Programming and Applied to Signal Processing. Mathematics. 2019; 7(9):866. https://doi.org/10.3390/math7090866
Chicago/Turabian StylePadcharoen, Anantachai, and Pakeeta Sukprasert. 2019. "Nonlinear Operators as Concerns Convex Programming and Applied to Signal Processing" Mathematics 7, no. 9: 866. https://doi.org/10.3390/math7090866
APA StylePadcharoen, A., & Sukprasert, P. (2019). Nonlinear Operators as Concerns Convex Programming and Applied to Signal Processing. Mathematics, 7(9), 866. https://doi.org/10.3390/math7090866