Parameter and State Estimation of One-Dimensional Infiltration Processes: A Simultaneous Approach



Abstract
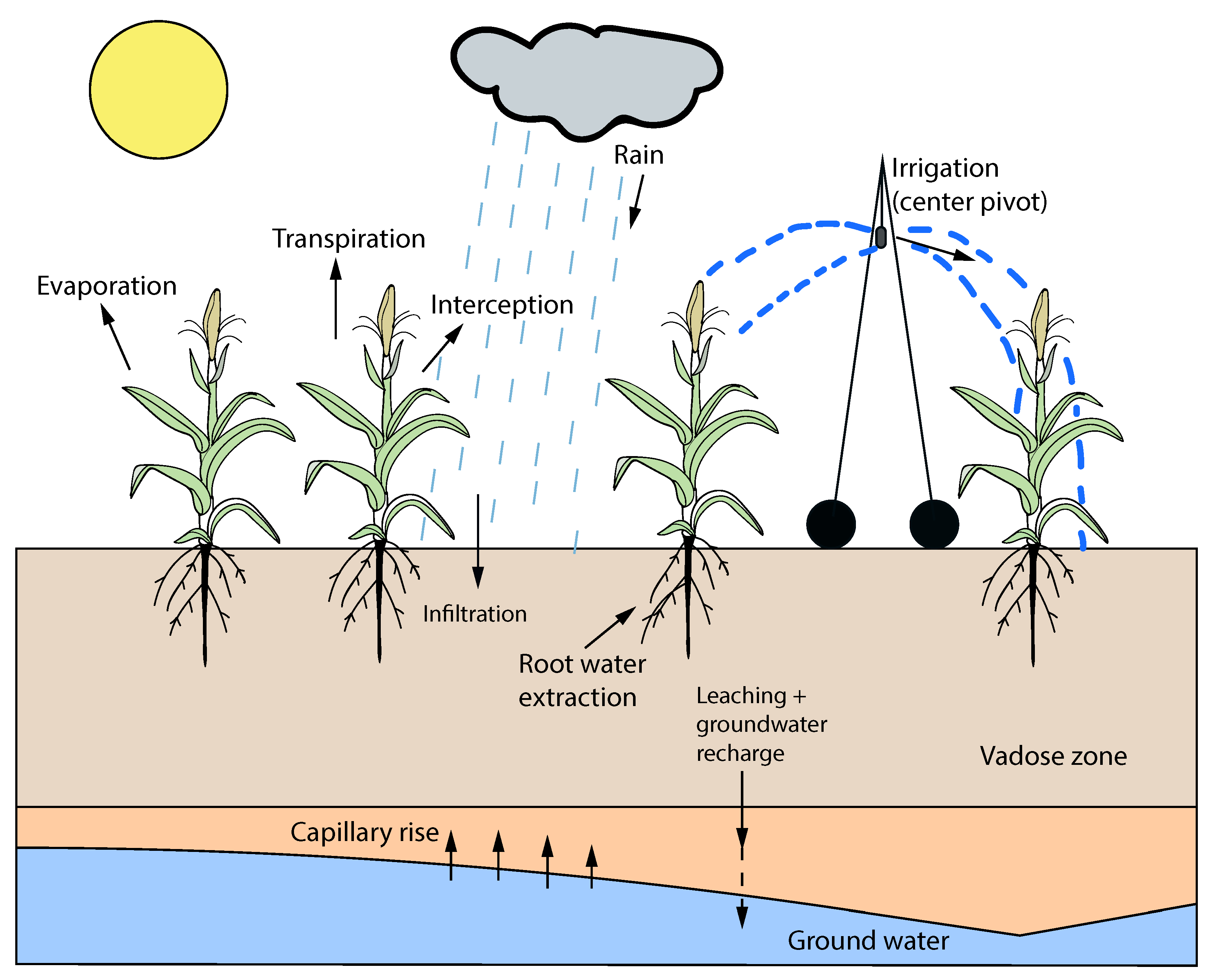
:1. Introduction
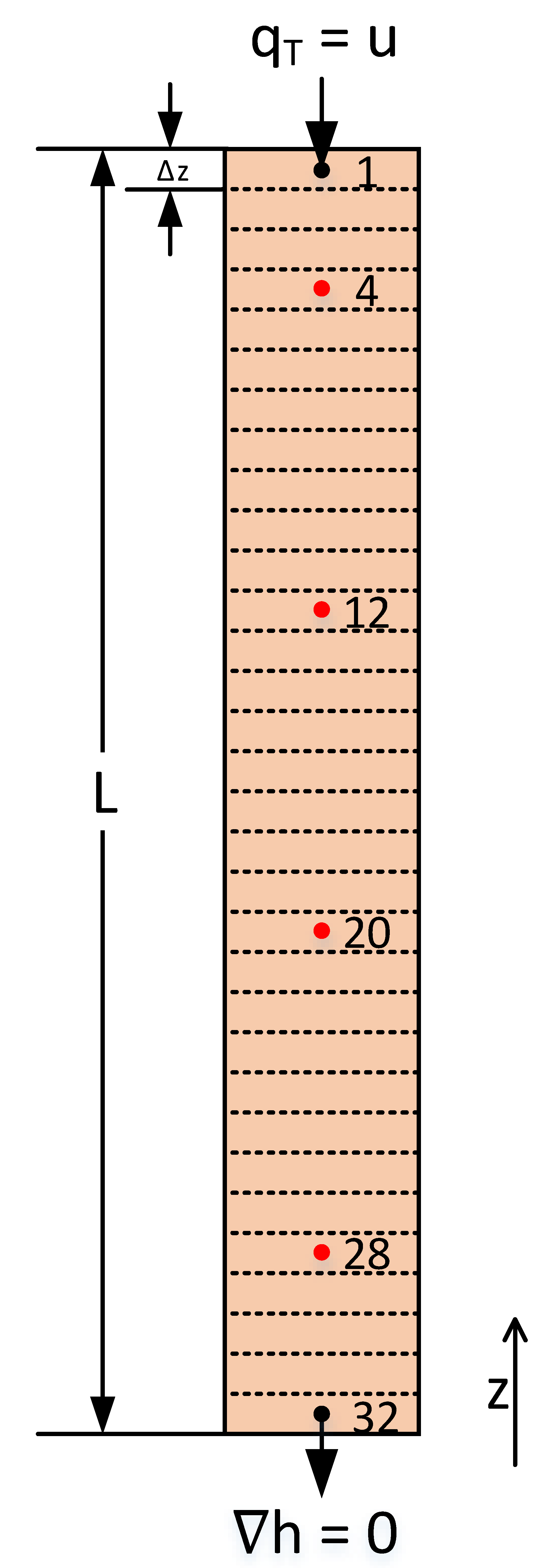
2. System Description and Problem Formulation
Finite Difference Model Development
3. Estimation Methods
3.1. Moving Horizon Estimation
3.2. Extended Kalman Filter
- Prediction step
- (a)
- State prediction:The model disturbance are not propagated as the states and parameters. Instead, it is explicitly included in the state covariance prediction.
- (b)
- State covariance prediction:where and Q is the covariance matrix of the model disturbance .
- Update step
- (a)
- Kalman gain calculation:where and R is the covariance matrix of the measurement noise .
- (b)
- State update:The augmented state and parameter vector X is updated when a new measurements is available.
- (c)
- State covariance update:State covariance matrix P is updated. I is the identity matrix with dimension .
3.3. Ensemble Kalman filter
- 1.
- Initialization step
- (a)
- Generating ensembles:where an ensemble containing M initial states , , is generated and m is the index of the ensemble. The ensemble follows the multivariate normal distribution with mean, and covariance matrix of the initial state, .
- 2.
- Prediction step
- (a)
- State prediction:where . Just like generating the ensemble of , a normally distributed set of are generated with the mean 0 and the covariance matrix Q. Overall M trajectories propagate, with model disturbance explicitly considered.
- 3.
- Update step
- (a)
- Kalman gain calculation:where, and . is the cross-covariance matrix of the state and measurement vectors and is the auto-covariance matrix of the measurement vector. The mean of the state or measurement vector is calculated based on the corresponding ensembles.
- (b)
- State update:where . All M state vectors are updated, when the new measurement is available. The measurement uncertainty is taken into account by generating a normally distributed ensemble of measurement noises , which has mean 0 and covariance matrix R. At last, the estimated state is obtained as the mean of the corresponding ensembles , .
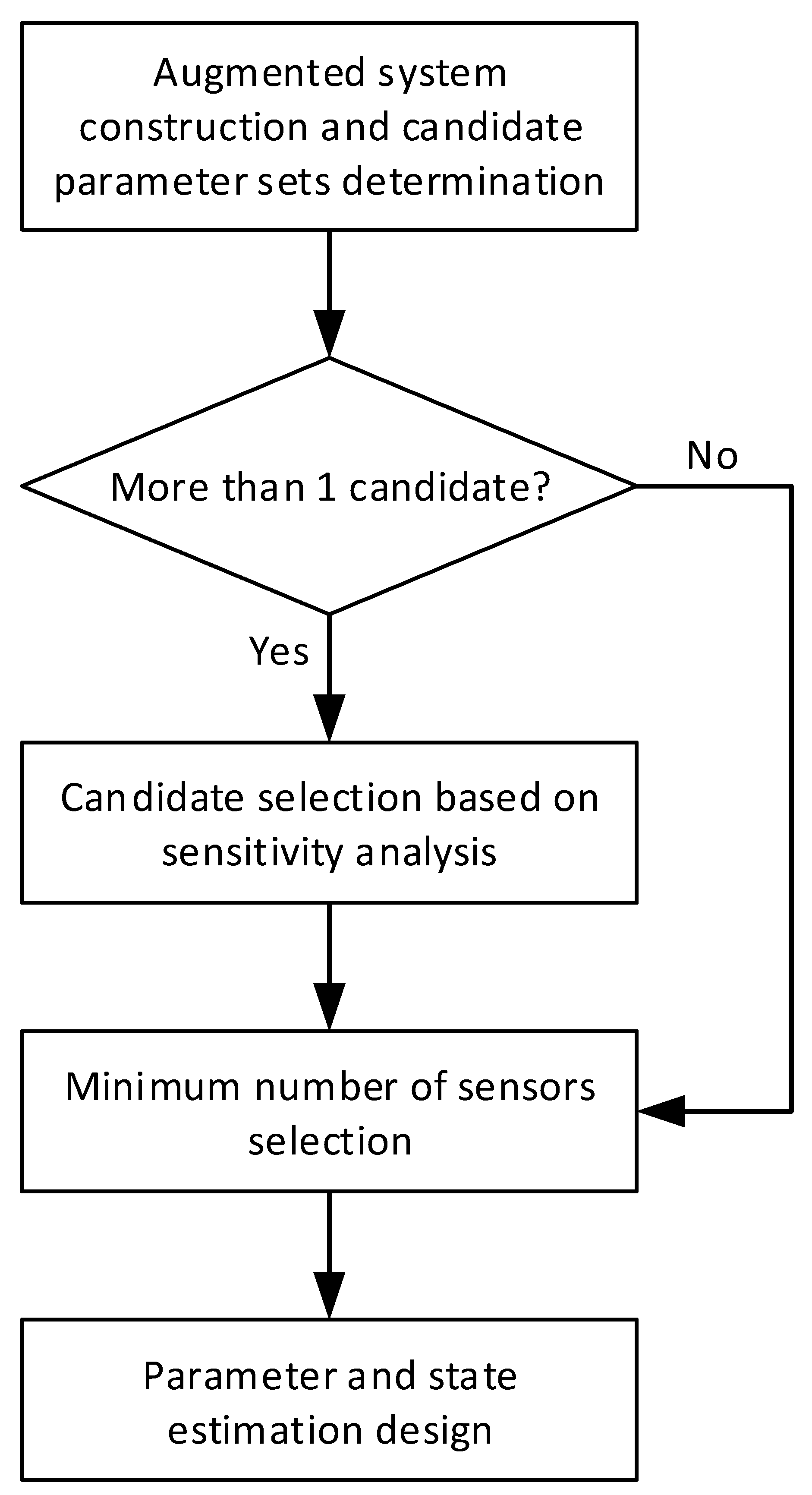
4. Proposed Procedure to Determine Significant Parameters and Number of Sensors
4.1. Determine Candidate Parameter Sets for Estimation
4.2. Sensitivity Analysis
4.3. Minimum Number of Sensors
5. Simulation Results and Discussion
5.1. System Description
5.2. Determination of Significant Parameters and Number of Sensors
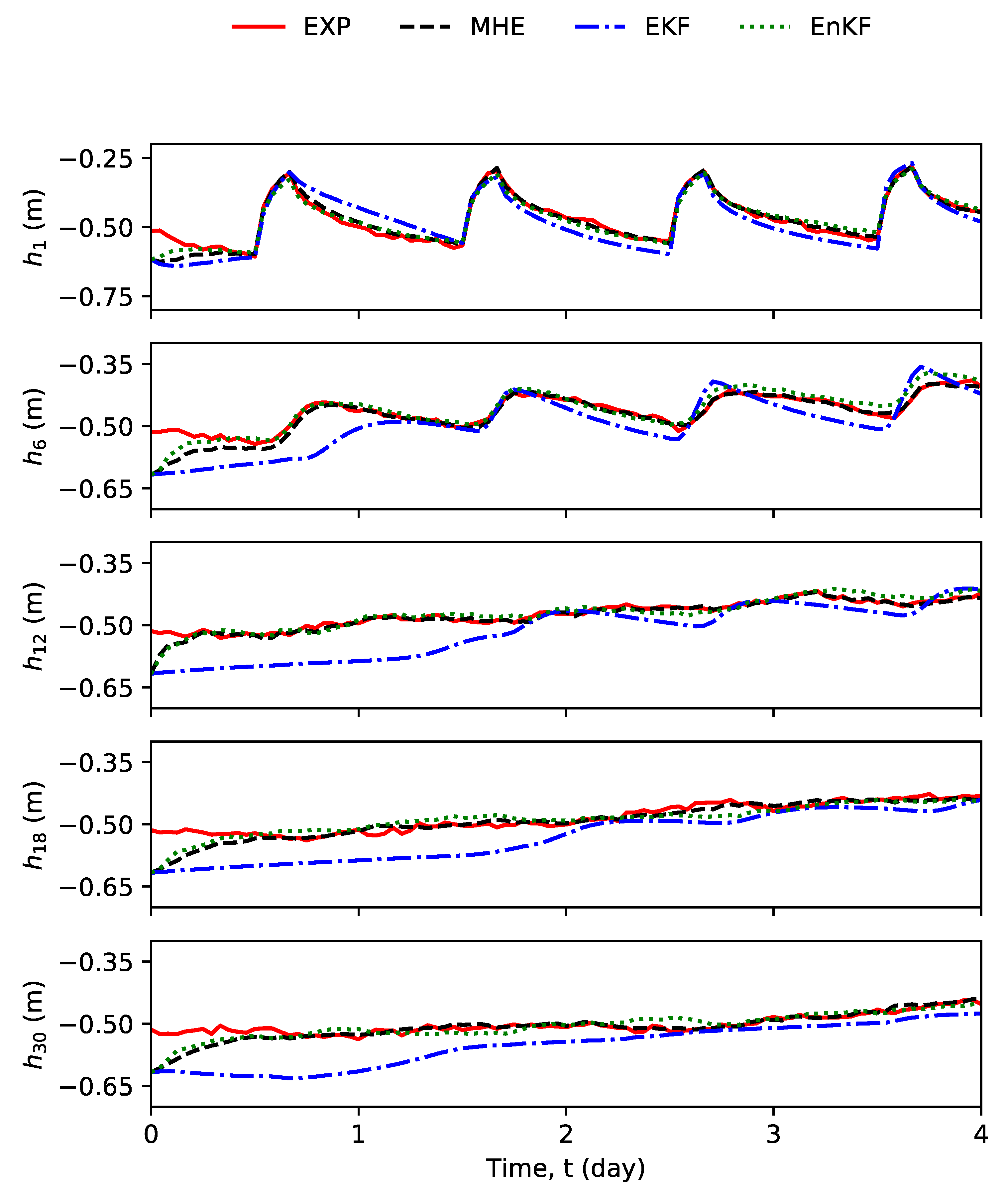
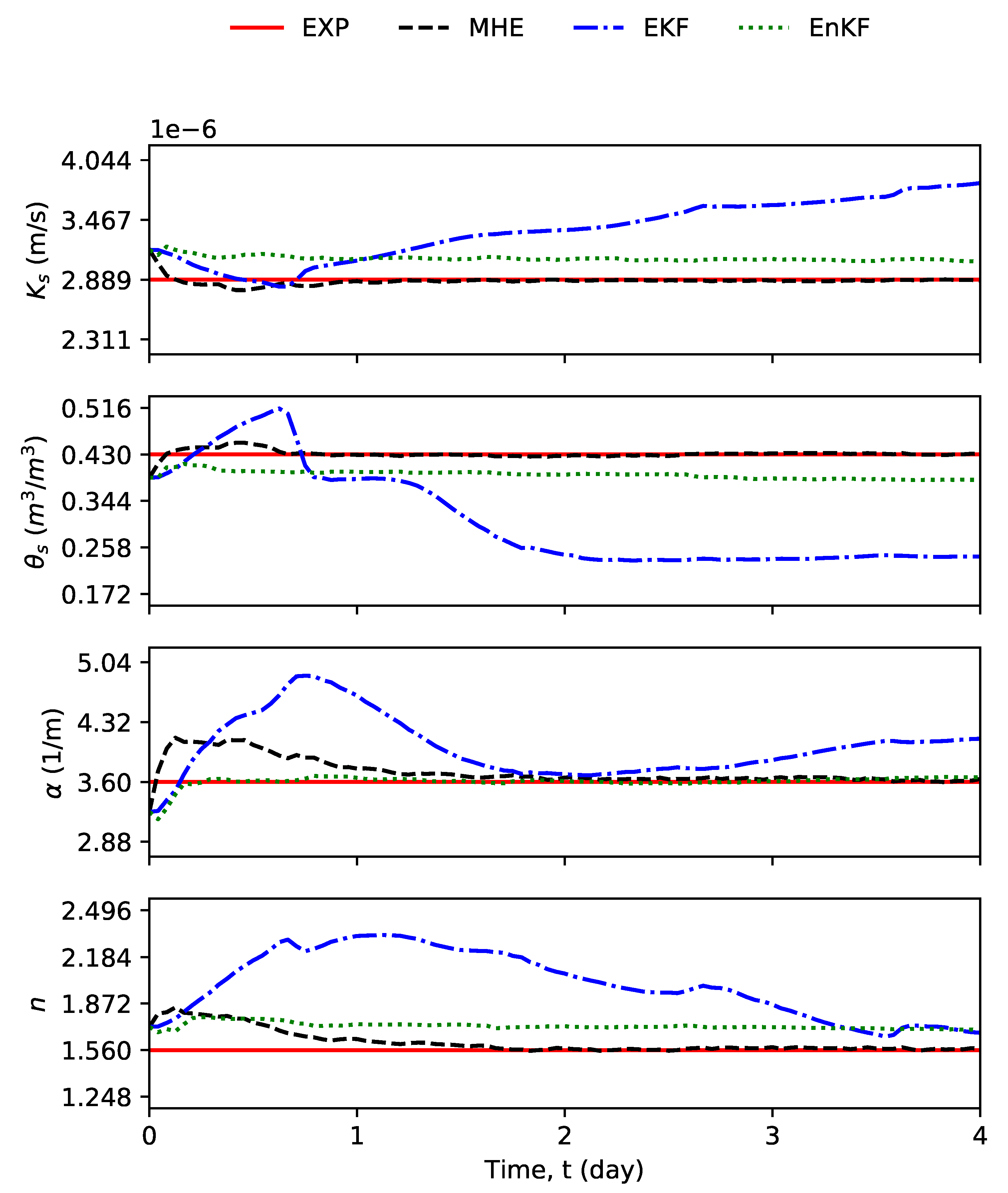
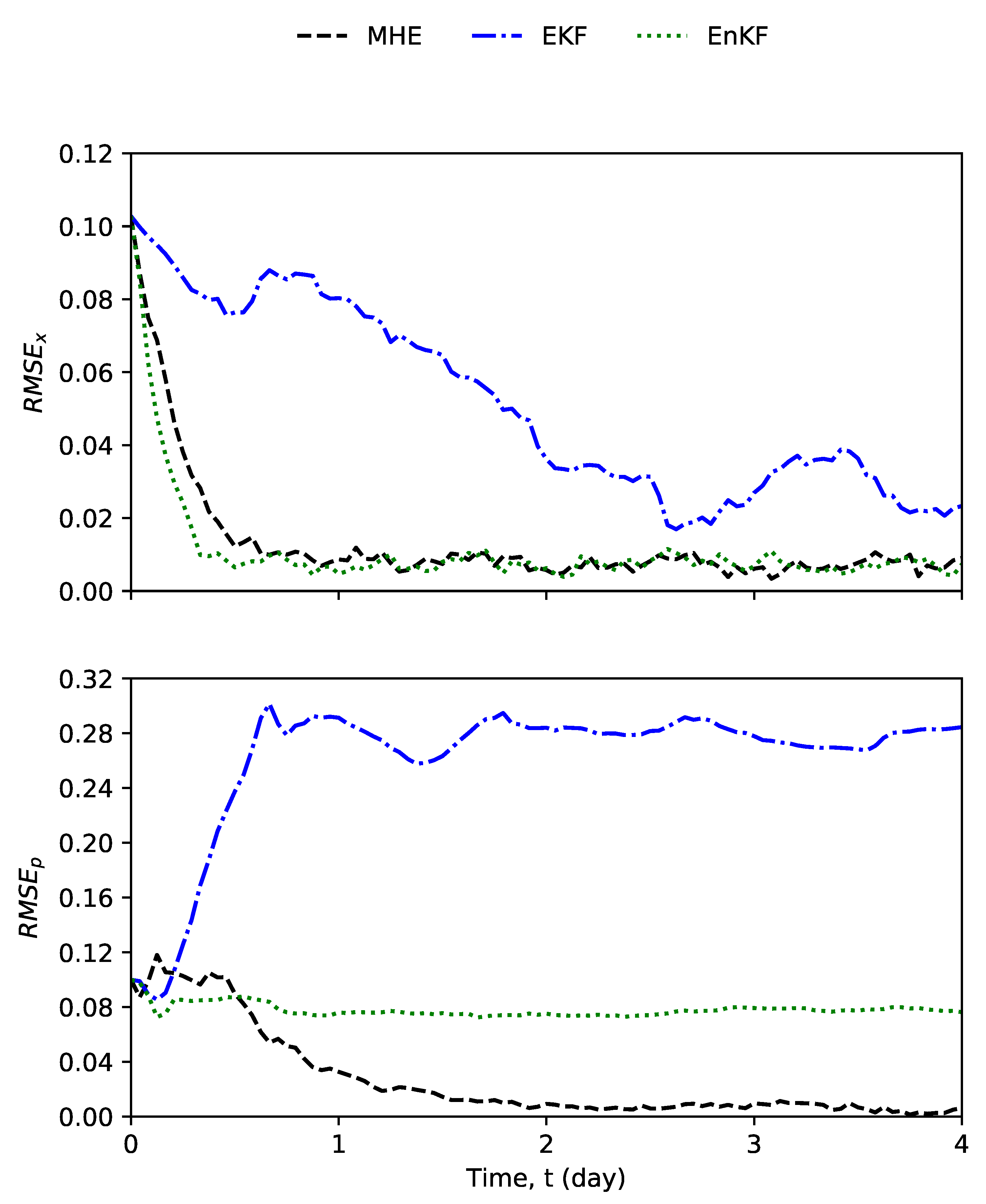
5.3. Simultaneous Parameter and State Estimation
5.4. Effects of the Simulation Parameters
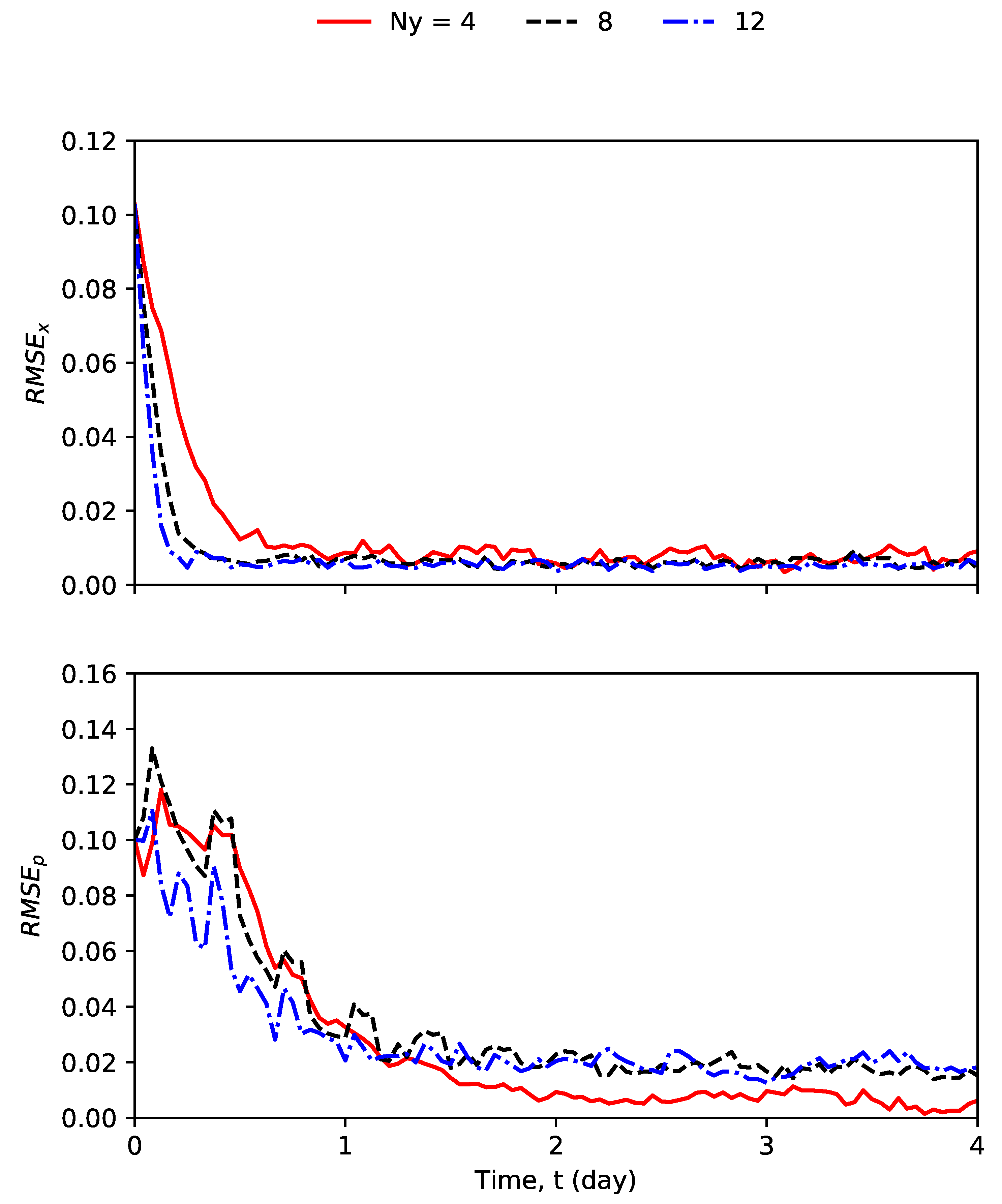
5.4.1. Effects of Number of Measurements
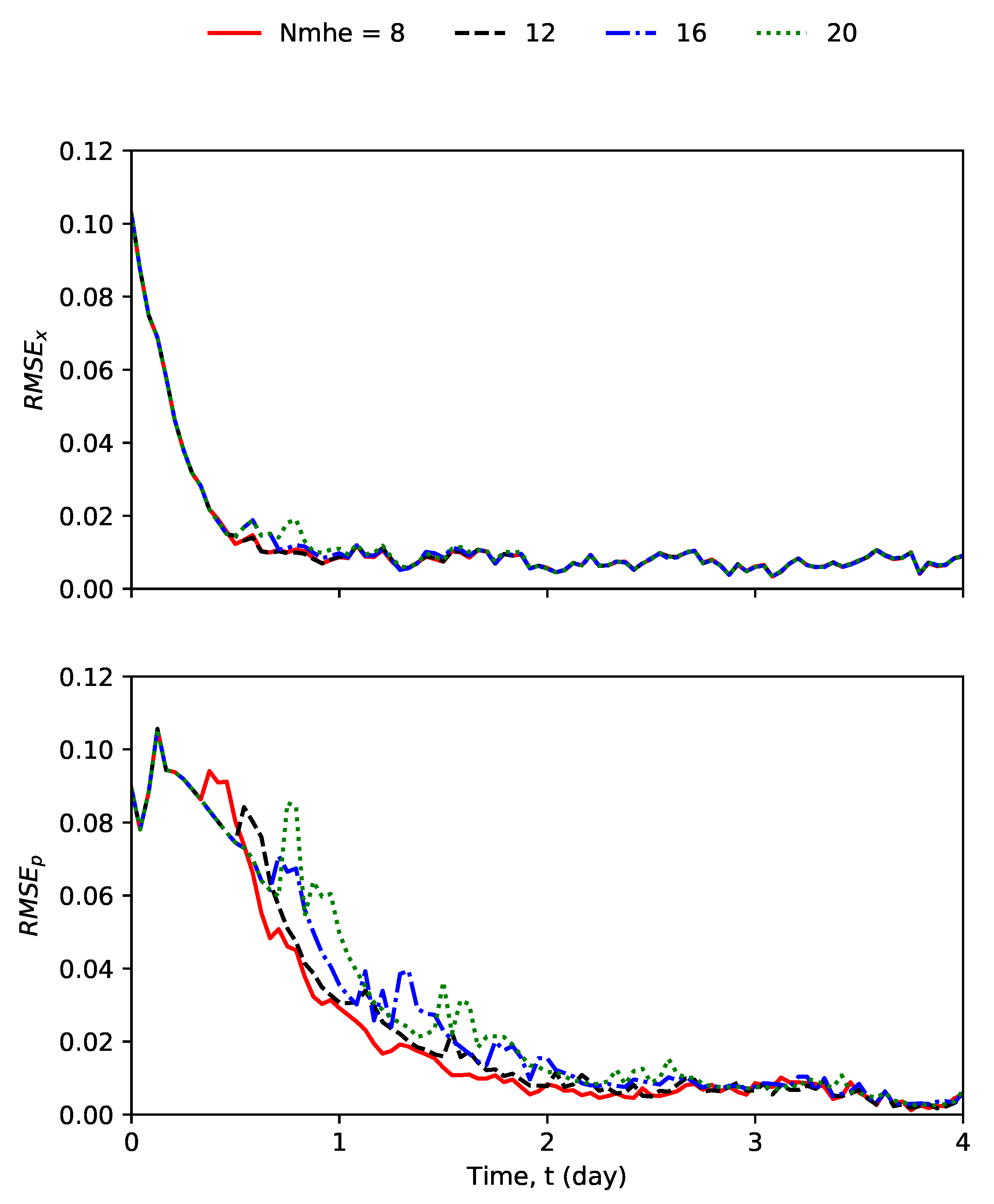
5.4.2. Effects of MHE Estimation Window Size
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- AQUASTAT Main Database. Food and Agriculture Organization of The United Nations (FAO). Available online: http://www.fao.org/nr/water/aquastat/data/query/index.html?lang=en (accessed on 31 October 2019).
- Fischer, G.; Tubiello, F.N.; van Velthuizen, H.; Wiberg, D.A. Climate change impacts on irrigation water requirements: Effects of mitigation, 1990–2080. Technol. Forecast. Soc. Chang. 2007, 74, 1083–1107. [Google Scholar] [CrossRef] [Green Version]
- Mao, Y.; Liu, S.; Nahar, J.; Liu, J.; Ding, F. Soil moisture regulation of agro-hydrological systems using zone model predictive control. Comput. Electron. Agric. 2018, 154, 239–247. [Google Scholar] [CrossRef]
- Narasingam, A.; Siddhamshetty, P.; Kwon, J.S.I. Handling Spatial Heterogeneity in Reservoir Parameters Using Proper Orthogonal Decomposition Based Ensemble Kalman Filter for Model-Based Feedback Control of Hydraulic Fracturing. Ind. Eng. Chem. Res. 2018, 57, 3977–3989. [Google Scholar] [CrossRef]
- Aanonsen, S.I. The Ensemble Kalman Filter in Reservoir Engineering—A Review. SPE J. 2009, 14, 393–412. [Google Scholar] [CrossRef]
- Siddhamshetty, P.; Kwon, J.S.I. Model-based feedback control of oil production in oil-rim reservoirs under gas coning conditions. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; IEEE: Milwaukee, WI, USA, 2018; pp. 2605–2610. [Google Scholar] [CrossRef]
- Hasan, A.; Foss, B.; Sagatun, S. Flow control of fluids through porous media. Appl. Math. Comput. 2012, 219, 3323–3335. [Google Scholar] [CrossRef]
- Bengtsson, L.; Ghil, M.; Källén, E. Dynamic Meteorology: Data Assimilation Methods; Springer: New York, NY, USA, 1981. [Google Scholar]
- Ghil, M.; Malanotte-Rizzoli, P. Data Assimilation in Meteorology and Oceanography. In Advances in Geophysics; Elsevier: Amsterdam, The Netherlands, 1991; Volume 33, pp. 141–266. [Google Scholar] [CrossRef]
- van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef] [Green Version]
- Marquardt, D.W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Kool, J.B.; Parker, J.C.; van Genuchten, M.T. Determining soil hydraulic properties from one-step outflow experiments by parameter estimation: I. Theory and numerical studies. Soil Sci. Soc. Am. J. 1985, 49, 1348–1354. [Google Scholar] [CrossRef] [Green Version]
- Toorman, A.F.; Wierenga, P.J.; Hills, R.G. Parameter estimation of hydraulic properties from one-step outflow data. Water Resour. Res. 1992, 28, 3021–3028. [Google Scholar] [CrossRef]
- van Dam, J.C.; Stricker, J.N.M.; Droogers, P. Inverse method for determining soil hydraulic functions from one-step outflow experiments. Soil Sci. Soc. Am. J. 1992, 56, 1042. [Google Scholar] [CrossRef]
- Il Hwang, S.; Powers, S.E. Estimating unique soil hydraulic parameters for sandy media from multi-step outflow experiments. Adv. Water Resour. 2003, 26, 445–456. [Google Scholar] [CrossRef]
- Russo, D.; Bresler, E.; Shani, U.; Parker, J.C. Analyses of infiltration events in relation to determining soil hydraulic properties by inverse problem methodology. Water Resour. Res. 1991, 27, 1361–1373. [Google Scholar] [CrossRef]
- Abbaspour, K.C.; van Genuchten, M.T.; Schulin, R.; Schläppi, E. A sequential uncertainty domain inverse procedure for estimating subsurface flow and transport parameters. Water Resour. Res. 1997, 33, 1879–1892. [Google Scholar] [CrossRef] [Green Version]
- Ritter, A.; Hupet, F.; MunÄoz-Carpena, R.; Lambot, S.; Vanclooster, M. Using inverse methods for estimating soil hydraulic properties from field data as an alternative to direct methods. Agric. Water Manag. 2003, 59, 77–96. [Google Scholar] [CrossRef]
- Rashid, N.S.A.; Askari, M.; Tanaka, T.; Simunek, J.; van Genuchten, M.T. Inverse estimation of soil hydraulic properties under oil palm trees. Geoderma 2015, 241–242, 306–312. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.B.; Liu, Y.; Nie, W.B.; Ma, X.Y. Inverse modeling of soil hydraulic parameters based on a hybrid of vector-evaluated genetic algorithm and particle swarm optimization. Water 2018, 10, 84. [Google Scholar] [CrossRef] [Green Version]
- Montzka, C.; Moradkhani, H.; Weihermüller, L.; Franssen, H.J.H.; Canty, M.; Vereecken, H. Hydraulic parameter estimation by remotely-sensed top soil moisture observations with the particle filter. J. Hydrol. 2011, 399, 410–421. [Google Scholar] [CrossRef]
- Lü, H.; Yu, Z.; Zhu, Y.; Drake, S.; Hao, Z.; Sudicky, E.A. Dual state-parameter estimation of root zone soil moisture by optimal parameter estimation and extended Kalman filter data assimilation. Adv. Water Resour. 2011, 34, 395–406. [Google Scholar] [CrossRef]
- Li, C.; Ren, L. Estimation of unsaturated soil hydraulic parameters using the ensemble Kalman filter. Vadose Zone J. 2011, 10, 1205–1227. [Google Scholar] [CrossRef]
- Medina, H.; Romano, N.; Chirico, G.B. Kalman filters for assimilating near-surface observations into the Richards equation - Part 2: A dual filter approach for simultaneous retrieval of states and parameters. Hydrol. Earth Syst. Sci. 2014, 18, 2521–2541. [Google Scholar] [CrossRef] [Green Version]
- Moradkhani, H.; Sorooshian, S.; Gupta, H.V.; Houser, P.R. Dual state–parameter estimation of hydrological models using ensemble Kalman filter. Adv. Water Resour. 2005, 28, 135–147. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Huang, C.; Shen, H.; Li, X. Comparison of ensemble-based state and parameter estimation methods for soil moisture data assimilation. Adv. Water Resour. 2015, 86, 425–438. [Google Scholar] [CrossRef]
- Chaudhuri, A.; Franssen, H.J.H.; Sekhar, M. Iterative filter based estimation of fully 3D heterogeneous fields of permeability and Mualem-van Genuchten parameters. Adv. Water Resour. 2018, 122, 340–354. [Google Scholar] [CrossRef]
- Rao, C.; Rawlings, J.; Mayne, D. Constrained state estimation for nonlinear discrete-time systems: Stability and moving horizon approximations. IEEE Trans. Autom. Control 2003, 48, 246–258. [Google Scholar] [CrossRef] [Green Version]
- Yin, X.; Decardi-Nelson, B.; Liu, J. Subsystem decomposition and distributed moving horizon estimation of wastewater treatment plants. Chem. Eng. Res. Des. 2018, 134, 405–419. [Google Scholar] [CrossRef]
- Yin, X.; Liu, J. Distributed moving horizon state estimation of two-time-scale nonlinear systems. Automatica 2017, 79, 152–161. [Google Scholar] [CrossRef]
- Bo, S.; Sahoo, S.R.; Yin, X.; Liu, J.; Shah, S.L. Simultaneous parameter and state estimation of agro-hydrological systems. In Proceedings of the IFAC 2020 World Congress, Berlin, Germany, 12–17 July 2020. [Google Scholar]
- Nahar, J. Closed-loop Irrigation Scheduling and Control. Ph.D. Thesis, University of Alberta, Edmonton, AB, Canada, 2019. [Google Scholar]
- Richards, L.A. Capillary conduction of liquids through porous mediums. Physics 1931, 1, 318–333. [Google Scholar] [CrossRef]
- Almendro-Candel, M.B.; Lucas, I.G.; Navarro-Pedreño, J.; Zorpas, A.A. Physical Properties of Soils Affected by the Use of Agricultural Waste. In Agricultural Waste and Residues; Aladjadjiyan, A., Ed.; IntechOpen: Rijeka, Croatia, 2018; Chapter 2. [Google Scholar] [CrossRef] [Green Version]
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. J. Geophys. Res. 1994, 99, 10143. [Google Scholar] [CrossRef]
- Gillijns, S.; Mendoza, O.; Chandrasekar, J.; De Moor, B.; Bernstein, D.; Ridley, A. What is the ensemble Kalman filter and how well does it work? In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; IEEE: Minneapolis, MN, USA, 2006; p. 6. [Google Scholar]
- Sahoo, S.R.; Yin, X.; Liu, J. Optimal sensor placement for agro-hydrological systems. AIChE J. 2019, e16795. [Google Scholar] [CrossRef]
- Villaverde, A.F.; Barreiro, A.; Papachristodoulou, A. Structural identifiability of dynamic systems biology models. PLoS Comput. Biol. 2016, 12, e1005153. [Google Scholar] [CrossRef] [Green Version]
- Nahar, J.; Liu, J.; Shah, S.L. Parameter and state estimation of an agro-hydrological system based on system observability analysis. Comput. Chem. Eng. 2019, 121, 450–464. [Google Scholar] [CrossRef]
- Eykhoff, P. System Identification: Parameter and State Estimation; Wiley: London, UK, 1974. [Google Scholar]
- Yuan, Z.; Zhao, C.; Di, Z.; Wang, W.X.; Lai, Y.C. Exact controllability of complex networks. Nat. Commun. 2013, 4, 2447. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carsel, R.F.; Parrish, R.S. Developing joint probability distributions of soil water retention characteristics. Water Resour. Res. 1988, 24, 755–769. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (m) | (m/s) | (1/m) | n | |||
|---|---|---|---|---|---|---|
| Loam | −0.514 | 0.430 | 0.0780 | 3.60 | 1.56 |
| (m) | (m/s) | (1/m) | n | |||
|---|---|---|---|---|---|---|
| Loam (true value) | −0.514 | 0.430 | 3.60 | 1.56 | 0.0780 | |
| Initial guess | −0.617 | 0.387 | 3.24 | 1.72 | 0.0780 |
| (m) | (m/s) | (1/m) | |||||
|---|---|---|---|---|---|---|---|
| Lower bounds | −1.00 | 0.344 | 2.88 | 1.25 | −∞ | 0.00 | |
| Upper bounds | 0.516 | 4.32 | 1.87 | ∞ | 0.00 |
| Cases | (m/s) | ||||
|---|---|---|---|---|---|
| (true value) | 0.0780 | 0.430 | 3.60 | 1.56 | |
| 0.0780 | 0.430 | 3.60 | 1.56 | ||
| 0.0702 | 0.430 | 3.60 | 1.56 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bo, S.; Sahoo, S.R.; Yin, X.; Liu, J.; Shah, S.L. Parameter and State Estimation of One-Dimensional Infiltration Processes: A Simultaneous Approach. Mathematics 2020, 8, 134. https://doi.org/10.3390/math8010134
Bo S, Sahoo SR, Yin X, Liu J, Shah SL. Parameter and State Estimation of One-Dimensional Infiltration Processes: A Simultaneous Approach. Mathematics. 2020; 8(1):134. https://doi.org/10.3390/math8010134
Chicago/Turabian StyleBo, Song, Soumya R. Sahoo, Xunyuan Yin, Jinfeng Liu, and Sirish L. Shah. 2020. "Parameter and State Estimation of One-Dimensional Infiltration Processes: A Simultaneous Approach" Mathematics 8, no. 1: 134. https://doi.org/10.3390/math8010134
APA StyleBo, S., Sahoo, S. R., Yin, X., Liu, J., & Shah, S. L. (2020). Parameter and State Estimation of One-Dimensional Infiltration Processes: A Simultaneous Approach. Mathematics, 8(1), 134. https://doi.org/10.3390/math8010134