1. Introduction
Set optimization has become an important research area and has gained tremendous interest within the optimization community due to its wide and important applications; see, e.g., [
1,
2,
3,
4]. There exist various research fields that directly lead to problems which can most satisfactorily be modeled and solved in the unified framework provided by set optimization. For example, duality in vector optimization, gap functions for vector variational inequalities, fuzzy optimization, as well as many problems in image processing, viability theory, economics etc. all lead to optimization problems that can be modeled as set-valued optimization problems. For an introduction to set optimization and its applications, we refer to [
5].
For example, it is well known that uncertain optimization problems can be modeled by means of set optimization. Uncertainty here means that some parameters are not known. Instead, possibly only an estimated value or a set of possible values can be determined. As inaccurate data can have severe impacts on the model and therefore on the computed solution, it is important to take such uncertainty into account when modeling an optimization problem. If uncertainty is included in the optimization model, one is left with not only one objective function value, but possibly a whole set of values. This leads to a set-valued optimization problem, where the objective map is set-valued.
Recently, it has been shown that certain concepts of robustness for dealing with uncertainties in vector optimization can be described using approaches from set-valued optimization (see [
2,
3] and a practical application in the context of layout optimization of photovoltaic powerplants in [
6]). The concept of interval arithmetic for computations with strict error bounds [
7] is also a special case of dealing with set-valued mappings.
To obtain minimal solutions of a set-valued optimization problem, one must analyze whether one set dominates another set in a certain sense, i.e., by means of a given set relation. As it turns out, however, (depending on the chosen set relation), this intuitive and natural mathematical modeling framework often reaches its limitations and leads to very large or—even worse—empty solution sets. This is especially important throughout the design and implementation process of numerical algorithms for set optimization problems: The criteria involved in the definition of the set relations are usually based on set inclusions which for continuous problems are very sensitive to numerical inaccuracies or even just round-off errors.
A simple way to remedy this is to use approximate solution concepts: Here, the strict set inclusions are in a way relaxed by extending (enlarging/translating) the quantities that are to be compared such that one obtains more robust results for the involved inclusion tests.
The goal of this paper lies in the characterization of several well-known set relations by means of a very broad, manageable and easy-to-compute functional in the context of approximate solutions to set optimization problems using the set approach. In contrast to recent results in this area (for example see [
8,
9,
10,
11]), we assume that the spaces in which the sets are compared are not endowed with a particular topology. Therefore, our results generalize those found in the literature by dismissing topological properties. Please note that the references [
10,
11] present results on scalarizing functionals, but the functional acts on a real linear topological space and no relation to approximate solutions is presented there. Moreover, in [
8,
9], the oriented distance functional (which implicitly requires a topology) is used to derive characterizations of set relations. To the best of our knowledge, our approach of combining algebraic tools with approximate minimality notions in set optimization is original. That way, our results are not only valid in a broader mathematical setting but also provide some further insight into the purely algebraic tools and theoretical requirements necessary to acquire our findings. This is not only mathematically interesting, but deepens the theoretical understanding of approximate minimality in set optimization. It is furthermore in line with the recent increased interest in studying optimality conditions and separation concepts in spaces without a particular topology underneath it, see [
12,
13,
14,
15,
16,
17,
18,
19,
20,
21] and the references therein.
2. Preliminaries
Throughout this work, let
Y be a real linear space. Following the nomenclature of [
22], for a nonempty set
, we denote by
the algebraic interior of
F and for any given
, let
We say that
F is
k-vectorially closed if
. Obviously, it holds
for all
.
We denote by
the power set of
Y without the empty set. For two elements
A,
B of
, we denote the sum of sets by
The set
is a cone if for all
and
,
holds true. The cone
F is convex if
.
Now let
and
. We recall the functional
from Gerstewitz [
23] (which has very recently been extended to the space
Y without assuming any topology, see [
24] and the references therein)
The functional
was originally introduced as scalarizing functional in vector optimization. Please note that the construction of
was mentioned by Krasnosel’skiĭ [
25] (see Rubinov [
26]) in the context of operator theory.
Figure 1 visualizes the functional
, where
has been taken as the natural ordering cone in
and
. We can see that the set
is moved along the line
up until
y belongs to
. The functional
assigns the smallest value
t such that the property
is fulfilled.
The functional
plays an important role as nonlinear separation functional for not necessarily convex sets. Applications of
include coherent risk measures in financial mathematics (see, for instance, [
27]) and uncertain programming (see [
2,
3]). Several important properties of
(in the case that
Y is endowed with a topology) were studied in [
28,
29]. Now let us recall the definition of
E-monotonicity of a functional.
Definition 1. Let . A functional is called E-monotoneif Below we provide some properties of the functional
introduced in (
1).
Proposition 1 ([
22]).
Let C and E be nonempty subsets of Y, and let . Then the following properties hold.- (a)
⟺.
- (b)
⟺.
- (c)
is E-monotone if and only if .
- (d)
.
The set relations to be defined below rely on set inclusions where the set C is attached pointwise to the considered sets . The following corollary relates and respectively by means of the functional in the case that C is a convex cone.
Corollary 1 ([
14], Corollary 2.3).
Let be a convex cone, and . Then it holds A well-known set relation is the upper set less order relation introduced by Kuroiwa [
30,
31]. We recall a generalized version of this relation here, where the underlying set
C is not necessarily a convex cone and thus the resulting relation is not necessarily an order.
Definition 2 (Upper Set Less Relation, [
32]).
Let . The upper set less relation is defined for two sets by The following theorem shows a first connection between the upper set less relation and the nonlinear scalarizing functional .
Theorem 1 ([
14], Theorem 3.2).
Let be a convex cone, and . Then The converse implication in Theorem 1 is not generally fulfilled, even if the underlying sets are convex, see ([
33], Example 3.2). However, we have the following result.
Theorem 2 ([
14], Theorem 3.3).
Let . For two sets and , it holdsAssume on the other hand that there exists a such that is attained for all , C is -vectorially closed and . Then Remark 1. - (1)
Please note that for any , the set relation by Theorem 2 also implies .
- (2)
Let and . If there exists an element such that is attained for all , C is -vectorially closed and , then it follows from Theorem 2 that
In the second part of Theorem 2, we need the assumption that there exists a
such that
is attained for all
. Sufficient conditions for such an attainment property, i.e., assertions concerning the existence of solutions of the corresponding optimization problems (extremal principles) are given in the literature. The well-known Theorem of Weierstrass says that a lower semi-continuous function on a nonempty weakly compact set in a reflexive Banach space has a minimum. An extension of the Theorem of Weierstrass is given by Zeidler ([
34], Proposition 9.13): A proper lower semi-continuous and quasi-convex function on a nonempty closed bounded convex subset of a reflexive Banach space has a minimum. Since the functional
is studied here in the context of real linear spaces that are not endowed with a particular topology, we cannot rely on continuity assumptions. Therefore, we propose the following theorem without any attainment property.
Theorem 3 ([
14], Theorem 3.6).
Let , and such that and . Then We also consider the following set relation, which compares sets based on their lower bounds (compare [
30,
31] for the according definition for orders).
Definition 3 (Lower Set Less Relation, [
32]).
Let . The lower set less relation is defined for two sets by Because is equivalent to , we obtain the following corollaries from Theorems 1, 2 and 3.
Corollary 2 ([
14], Corollary 3.9).
Let be a convex cone, and . Then Corollary 3 ([
14], Corollary 3.10).
Let . For two sets and , it holdsAssume on the other hand that there exists a such that is attained for all , C is -vectorially closed and . Then Corollary 4 ([
14], Corollary 3.11).
Let , and such that and . Then We also study the so-called
set less relation (see [
35,
36] for the case where the underlying set
C is a convex cone).
Definition 4 (Set Less Relation, [
32]).
Let . The set less relation is defined for two sets by We immediately obtain the following results.
Corollary 5 ([
14], Corollary 3.13).
Let be a convex cone, and . Then Corollary 6 ([
14], Corollary 3.14).
Let . For two sets and , it holdsAssume on the other hand that there exists a such that is attained for all , and there exists such that is attained for all , C is both - and -vectorially closed, and . Then Corollary 7 ([
14], Corollary 3.15).
Let , and such that , , and . Then 3. Approximate Minimal Elements of Set Optimization Problems
The following definition describes minimality in the setting of a family of sets (see ([
5], Definition 2.6.19) for the corresponding definition for preorders).
Definition 5 (Minimal Elements).
Let be a family of elements of . is called a minimal element of w. r. t. ⪯ ifThe set of all minimal elements of w. r. t. ⪯ will be denoted by . Please note that if the elements of
are single-valued and
with
being a convex cone, then Definition 5 reduces to the standard notion of minimality in vector optimization (compare, for example, ([
15], Definition 4.1)). From vector optimization, it is well known that usually, the existence of minimal elements can only be guaranteed under additional assumptions (for an existence result of minimal elements in set optimization, see, for example, [
37]). Since the set
may be empty, it is common practice to use a weaker notion of minimality, so-called approximate minimality. For this reason, we extend three notions of approximate minimality that were originally introduced in [
38]. In [
38], the following definitions are given for
(see Definition 3). In order to stay as general as possible, we define approximate minimality using set relations that are not required to possess any ordering structure.
Definition 6. Let be a family of elements of , , and ⪯ be a binary relation on .
- (a)
is called an –approximate minimal element of w. r. t. ⪯ if - (b)
is called an –approximate minimal element of w. r. t. ⪯ if - (c)
is called an –approximate minimal element of w. r. t. ⪯ if , for all .
The set of all –approximate minimal elements of w. r. t. ⪯ () will be denoted by .
Please note that Definition 6 (a) is a natural formulation for approximate minimality, while Definition 6 (b) is derived from the standard notion of approximate efficiency for vector-valued maps (see ([
38], Remark 2.5)). Definition 6 (c) represents an approximate version of the well-known nondomination concept of vector optimization.
Here we consider a set-valued optimization problem in the following setting: Let
, a set-valued mapping
and a set relation ⪯ be given. We are looking for
approximate minimal elements w. r. t. the order relation ⪯ in the sense of Definition 6 of the problem
We say that
is an
–approximate minimal solution (
) of (
2) w. r. t. ⪯ if
is an
–approximate minimal element of the family of sets
,
w. r. t. ⪯. The family of sets
,
, is denoted by
.
Now we will present characterizations of approximate minimal solutions of (
2) w. r. t. ⪯. In what follows, we will use the following notation. For some
, let us denote
and
The following proposition will be useful in the theorem below.
Proposition 2. is an -approximate minimal solution of the problem (2) w. r. t. ⪯ if and only if for any , we have . Proof. First note that
means that
such that
or
. Let
be an
-approximate minimal solution of the problem (
2) w. r. t. ⪯. Then we must consider two cases:
- Case 1:
For and , there is nothing left to show.
- Case 2:
For and , we obtain due to ’s -approximate minimality, as desired.
Conversely, assume that for all
,
holds true. Suppose, by contradiction, that
is not an
-approximate minimal solution of the problem (
2) w. r. t. ⪯. This implies the existence of some
with the properties
and
, in contradiction to the assumption. □
Now we consider a functional
with the property
Then we have the following characterization for
-approximate minimal solution of the problem (
2) w. r. t. ⪯.
Theorem 4. is an -approximate minimal solution of the problem (2) w. r. t. ⪯ if and only if the following system (in the unknown x)is impossible. Proof. First note that due to Proposition 2,
is an
-approximate minimal solution of the problem (
2) w. r. t. ⪯ if and only if for
, we have
. Furthermore, we have
□
In a similar manner as Proposition 2 and Theorem 4, one can verify the following results. For this, we assume that we are given a functional
with the property
Proposition 3. is an -approximate minimal solution of the problem (2) w. r. t. ⪯ if and only if for any , we have . Theorem 5. is an -approximate minimal solution of the problem (2) w. r. t. ⪯ if and only if the following system (in the unknown x)is impossible. Let us now consider problem (
2) with the set relation
. Motivated by Theorem 3 and Corollary 4 above, we consider the functionals
(
) defined by
Assumption 1. For , , and we assume that
- (a-H1)
C is k-vectorially closed, , and for all and , the infimum is attained;
- (a-H2)
C is k-vectorially closed, , and for all and , the infimum is attained;
- (b)
and .
We next present a sufficient and necessary condition for
-approximate minimal solutions of the problem (
2) w. r. t. the relation
.
Corollary 8. Let Assumption 1 (a-) or (b) be satisfied. Then is an -approximate minimal solution () of the problem (2) w. r. t. if and only if the following system (in the unknown x)is impossible. Proof. The proof follows by Theorems 2, 3, 4 and 5. □
Furthermore, let us consider problem (
2) with
. We define the functions
for
by
Assumption 2. For , , and we assume that
- (a-H1)
C is k-vectorially closed, , and for all and , the infimum is attained;
- (a-H2)
C is k-vectorially closed, , and for all and , the infimum is attained;
- (b)
and for all .
In the following, we present a sufficient and necessary condition for
-approximate minimal solutions of the problem (
2) w. r. t.
.
Corollary 9. Let Assumption 2 (a-) or (b) be satisfied. Then is an -approximate minimal solution () of the problem (2) w. r. t. if and only if the following system (in the unknown x)is impossible. Proof. The proof follows by Corollaries 3 and 4 as well as Theorems 4 and 5. □
Finally, we have the following result for
-approximate minimal solutions of the problem (
2) w. r. t.
.
Corollary 10. Let and suppose that Assumptions 1 (a-) and 2 (a-) or Assumptions 1 (b) and 2 (b) are satisfied for the same . Then is an -approximate minimal solution of the problem (2) w. r. t. if and only if the following system (in the unknown x):is impossible. 4. Numerical Procedure for Computing -Approximate Minimal Elements of a Family of Finitely Many Elements
Finding
-approximate minimal elements of a family of finitely many elements of
is very important. A first approach to deriving and implementing numerical methods for obtaining
-approximate minimal elements has been presented in [
38] for the lower set less relation
. The assumption that the given family is finitely valued is oftentimes not a restriction, as many continuous set optimization problem can be appropriately discretized, see the discussion in [
39] and the theoretical investigations for linear programs [
40] as well as the numerical studies in [
41]. In this section, we propose numerical methods for obtaining approximate minimal elements as proposed in Definition 5 for general set relations under suitable assumptions.
Please note that the following algorithms can be found in [
38] for the specific case that the set relation is equal to
. We present them here for general set relations ⪯. The following algorithm is an extension of the so-called
Graef-Younes method [
42,
43] and it is useful for sorting out elements which do not belong to the set of
–approximate minimal elements.
| Algorithm 1: (Method for sorting out elements of a family of finitely many sets which are not - (-, -, respectively) approximate minimal elements). |
| Input:, set relation ⪯, |
| % initialization |
| , |
| % iteration loop |
| fordo |
| if |
| , respectively, |
| , , respectively, then |
| |
| end if |
| end for |
| Output: |
Remark 2. - 1.
Please note that the if-condition in Algorithm 1 is usually not implemented straightforwardly but instead an additional loop over the elements of the set is performed. We nevertheless use the above notation of this step to be consistent with the literature on algorithms of Graef-Younes type.
- 2.
Note also that the if-condition describes approximate minimality in the set . Therefore, Definition 6 does not have to be applied to the whole set , but to a smaller set , which can drastically reduce the numerical effort. In this way, non-approximate minimal elements can be eliminated from the set , as the following theorem shows.
Theorem 6. - 1.
Algorithm 1 is well-defined.
- 2.
Algorithm 1 generates a nonempty set .
- 3.
Every - (-, -, respectively) approximate minimal element of w. r. t. ⪯ also belongs to the set generated by Algorithm 1.
Proof. The statements 1 and 2 are easily checked (We loop over a finite number of elements, all the necessary comparisons are well-defined and after the first step, the set
already consists of an element.) and therefore, their proofs are omitted. Now let
be an
- (
-,
-, respectively) approximate minimal element of
. Then we have
Because of
, by the above implications we directly obtain
which verifies that the if-condition in Algorithm 1 is satisfied and
is added to
. □
After the application of Algorithm 1 we have only created a smaller set
containing all the approximate minimal elements of the original family of sets. To filter out solely the approximate minimal elements, another step is required which we handle in the following algorithm:
| Algorithm 2: (Method for finding - (-, -, respectively) approximate minimal elements of a family of finitely many sets). |
| Input:, set relation ⪯, |
| % initialization |
|
| % forward iteration loop |
| fordo |
| if |
| , |
| , , respectively, then |
| |
| end if |
| end for |
|
|
| % backward iteration loop |
| fordo |
| if |
| , |
| , , respectively, then |
| |
| end if |
| end for |
| Output: |
|
|
| % final comparison |
| fordo |
| if |
| , respectively, |
| , respectively, then |
| |
| end if |
| end for |
| Output: |
Remark 3. - 1.
Again, for determining whether the implications in the definition of minimality are fulfilled, one must loop over the elements of the sets of , and , resp.
- 2.
Please note that we formulated Algorithm 2 to have two outputs and . For practical purposes it would suffice to use which in fact contains all the approximate minimal elements and no more. However, the theoretical investigations below show that the set is in its own right interesting to be examined further.
We start the investigation of the above algorithms for the (arguably simplest) case of -approximate minimality. The following result shows that every element of the set is an -approximate minimal element of w. r. t. ⪯ (but not necessarily an -approximate minimal element of the set ).
Lemma 1. Every element of generated by Algorithm 2 after the backward iteration is also an -approximate minimal element of w. r. t. ⪯.
Proof. Let
. By the forward iteration, we obtain
The backward iteration yields
This means that
which is equivalent to
This is the definition of an
-approximate minimal element of
w. r. t. ⪯. □
Theorem 7. Algorithm 2 generates exactly all -approximate minimal elements of w. r. t. ⪯ within the set .
Proof. Let
be an arbitrary element in
. Then
, as
, and due to the third if-statement in Algorithm 2
Suppose that
is not
-approximate minimal in
. Then there exists some
such that
If
, then this is a contradiction to (
3). If
, then due to the
-approximate minimality of
in
(see Lemma 1), we obtain
, a contradiction to (
4).
Conversely, let
be
-approximate minimal in
. This means, by definition that
Now let us assume, by contradiction, that
. Then, there exists some
with
, a contradiction. □
To obtain similar results as in Lemma 1 and Theorem 7 for - (-, respectively) approximate minimal elements of w. r. t. ⪯, we need the following assumption.
Assumption 3. Suppose that one of the following conditions holds:
- 1.
The set relation ⪯ is irreflexive.
- 2.
The set relation ⪯ is reflexive and for every , .
Assumption 4. Suppose that for all , it we have or .
Below we give some examples of set relations that fulfill the above assumptions.
Example 1. - 1.
Consider the certainly less relation, which is defined as (see ([32], Definition 3.12))where . Then is irreflexive if C is pointed, i.e., (hence, ). - 2.
Let us recall the possibly less relation, given as (compare [32,37,44])where such that . Then is reflexive. If C is a convex cone with , then for all . - 3.
If C is a convex cone with and , then holds true for all .
Lemma 2. Let Assumption 3 (Assumption 4, respectively) be fulfilled. Then every element of generated by Algorithm 2 is also an - (-, respectively) approximate minimal element of w. r. t. ⪯.
Proof. Let
. By the forward iteration, we obtain
The backward iteration yields (
5) ((
6), respectively) for every
. Together, this means that
Since the set relation is, due to Assumption 3 either irreflexive or reflexive and for every
,
, (
7) is equivalent to the implication given in Definition 6 (a), and hence,
is an
–approximate minimal element of
w. r. t. ⪯. Similarly, according to Assumption 4, it holds for all
or
. With this in mind, the implication (
8) coincides with Definition 6 (b), and hence,
. □
Theorem 8. Let Assumption 3 (Assumption 4, respectively) be fulfilled. Then Algorithm 2 generates exactly all - (-, respectively) approximate minimal elements of w. r. t. ⪯.
Proof. Let
be an arbitrary element in
. Then
, as
, and due to the third if-statement in Algorithm 2
Suppose that
is not
- (
-, respectively) approximate minimal in
. Then there exists some
such that
If
, then this is a contradiction to (
9) ((
10), respectively). If
, then
, as
is
- (
-, respectively) approximate minimal in
according to Lemma 2. But this contradicts the implication (
11) ((
12), respectively).
Conversely, let
be an
- (
-, respectively) approximate minimal element in the set
, i.e.,
Now let us assume, by contradiction, that
. Then, there exists some
with
(
, respectively), but
, a contradiction to (
13). □
To illustrate the algorithms, we will apply the forward and backward iteration for a rather academic example in
. Note, however, that its (even computerized) application is not limited to these finite-dimensional structures as the algorithms are based on elementary finite iteration loops. So, once a way has been established to numerically assert the relation
for two sets
A and
B out of a certain family of sets, the algorithms can directly be applied. For the case of polyhedral sets, such a comparison principle has, for example, been established in [
45] and similar computational approaches were developed in [
46].
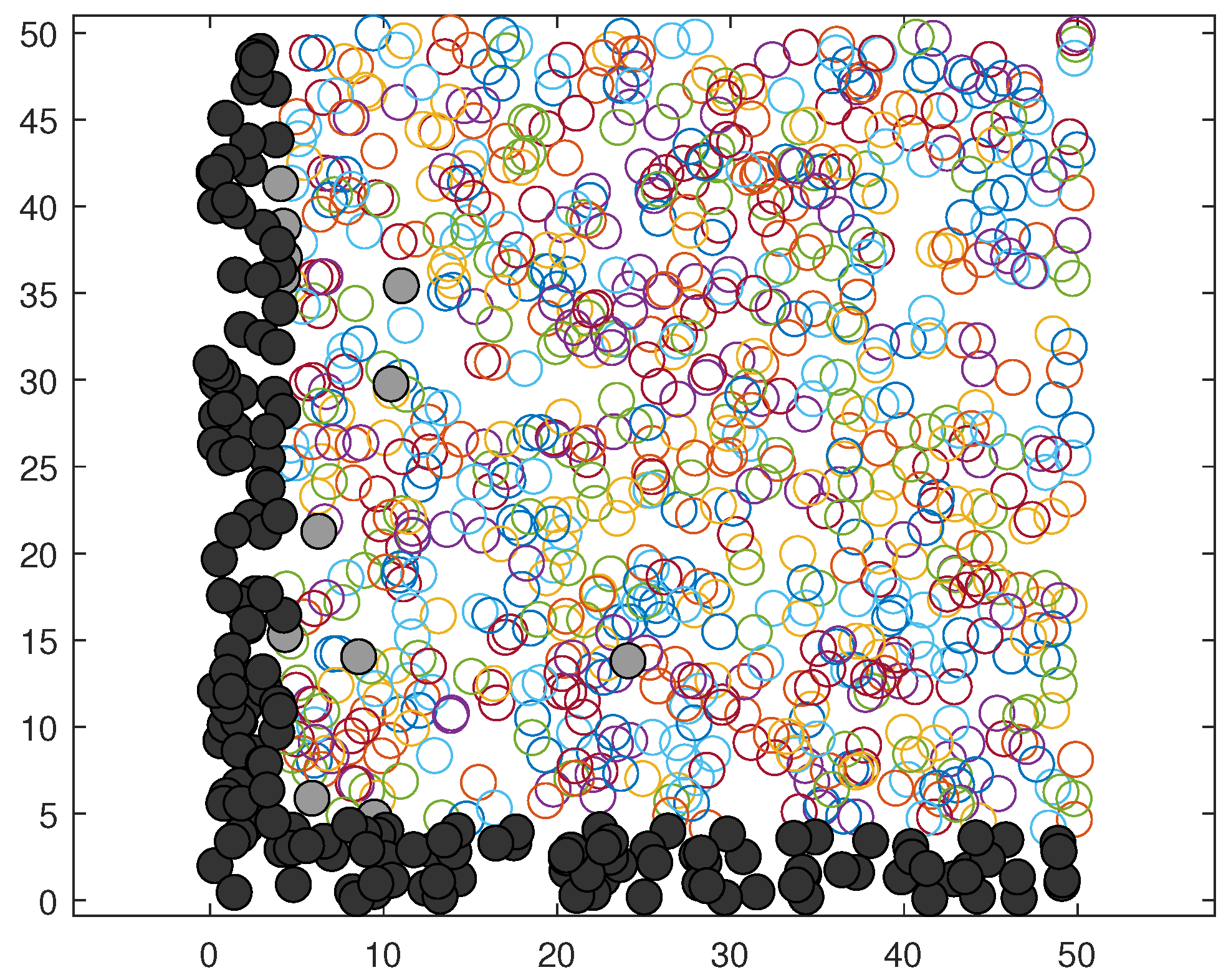
Example 2. For this example, let , and . As the family of sets , we have randomly computed 1000 sets, for easy comparison each set is a ball of radius one in . We are interested in the -approximate minimal elements of the set and make use of Algorithm 2 to obtain those. Notice that Assumption 4 is trivially fulfilled. Out of the 1000 sets, a total number of 177 are -approximate minimal w. r. t. to ⪯. Algorithm 2 generates at first 189 sets in ; then, 177 sets are collected within the set and . We used the same data as in Example 4.7 and 4.14 from [32], and according to our earlier results, a total number of 93 elements are minimal. In Figure 2, the sets within are the lightly and darkly filled circles, while the -approximate minimal elements of the set (that is, the sets in and ) are the darkly filled circles. For comparison, Algorithm 2 is also used on the same family of sets with (see ([32], Example 4.7 and 4.14)), with 103 sets within and 93 sets within and , see Figure 3. Let us note that this example is chosen to illustrate the efficiency of Algorithm 2 as it is to be expected for problems with relatively homogeneous distribution of set size and structure, see the according discussion in the vector-valued case [15,43]. Of course, the notion of approximate minimality makes sense when minimal elements do not exist (in the vector-valued case, this can happen when the set of feasible elements in the objective space is open). In the future, we will study continuity notions of set-valued mappings that appear in set optimization problems and investigate existence results.

{kind=link}
{kind=link}
{kind=link}


