Nonlinear Dynamics and Control of a Cube Robot




Abstract
:1. Introduction
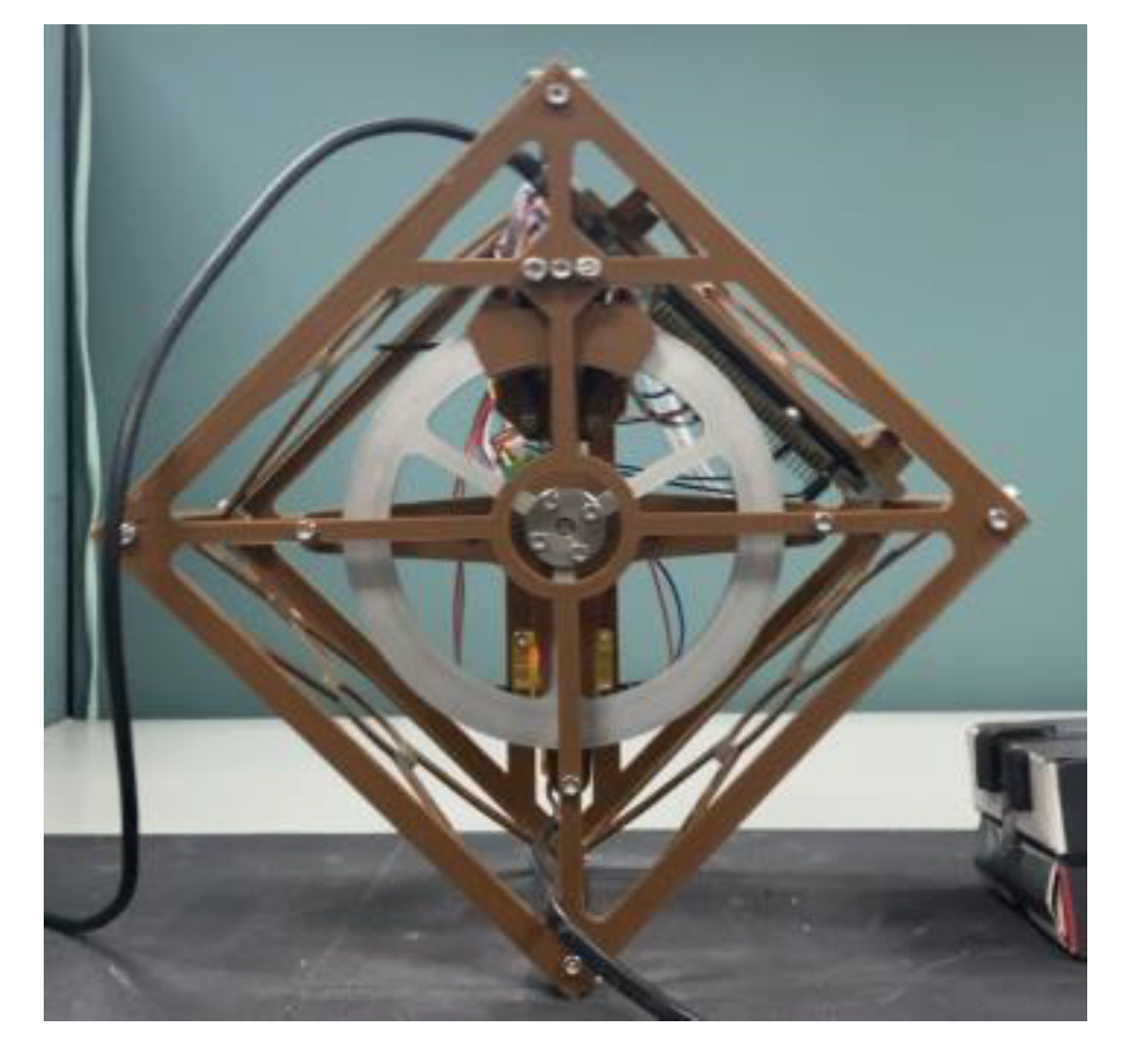
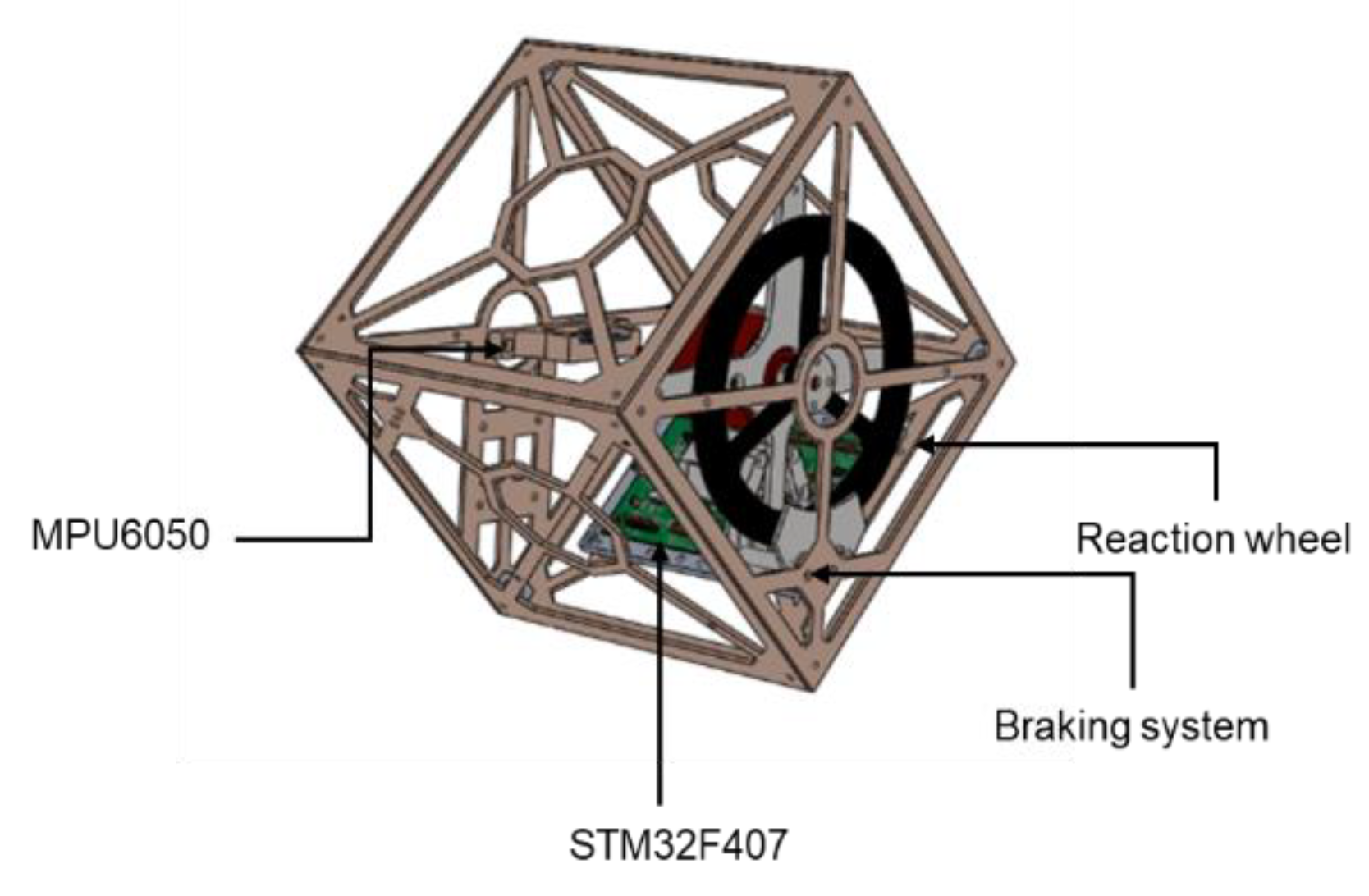
2. The Cube Robot Prototype
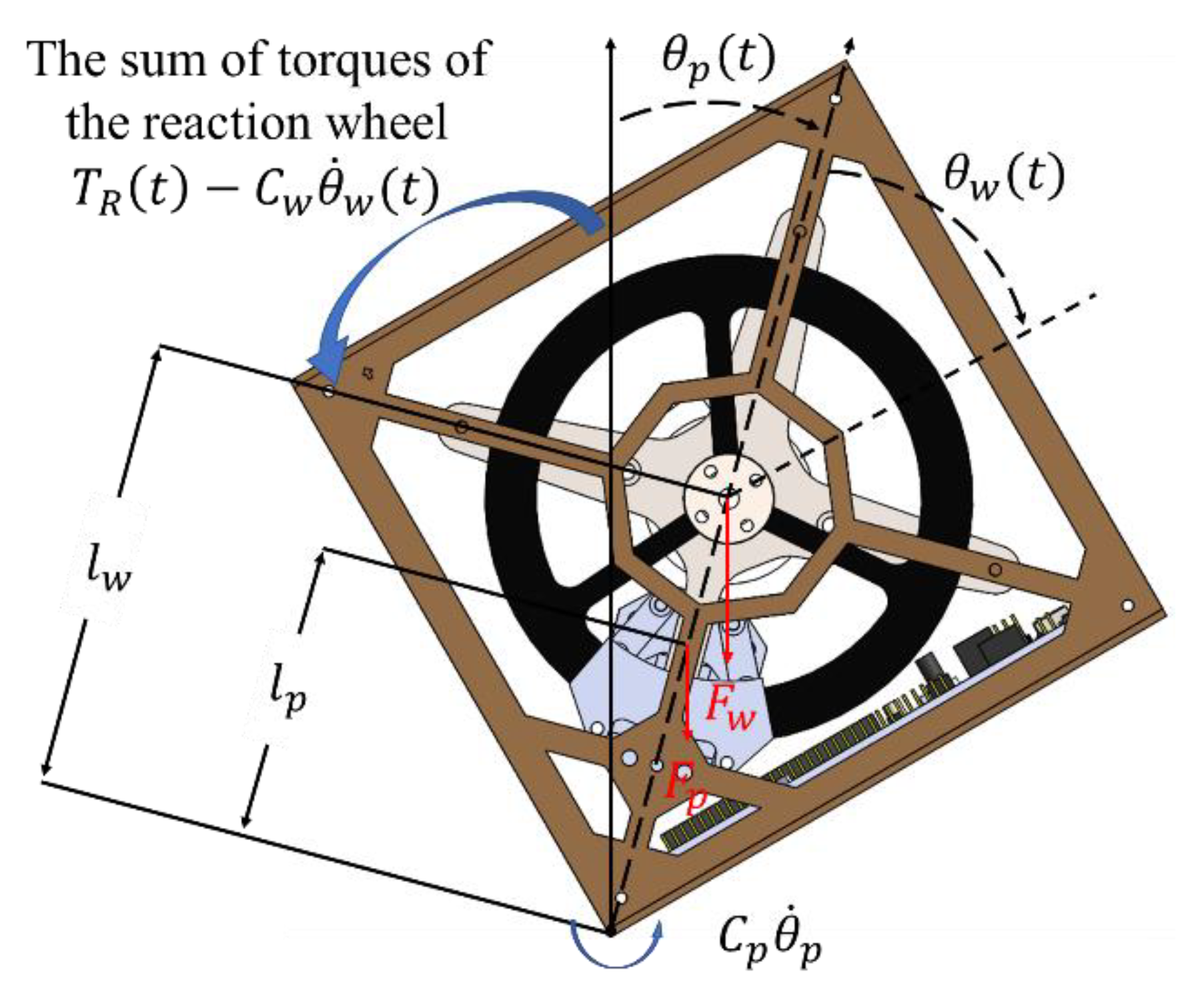
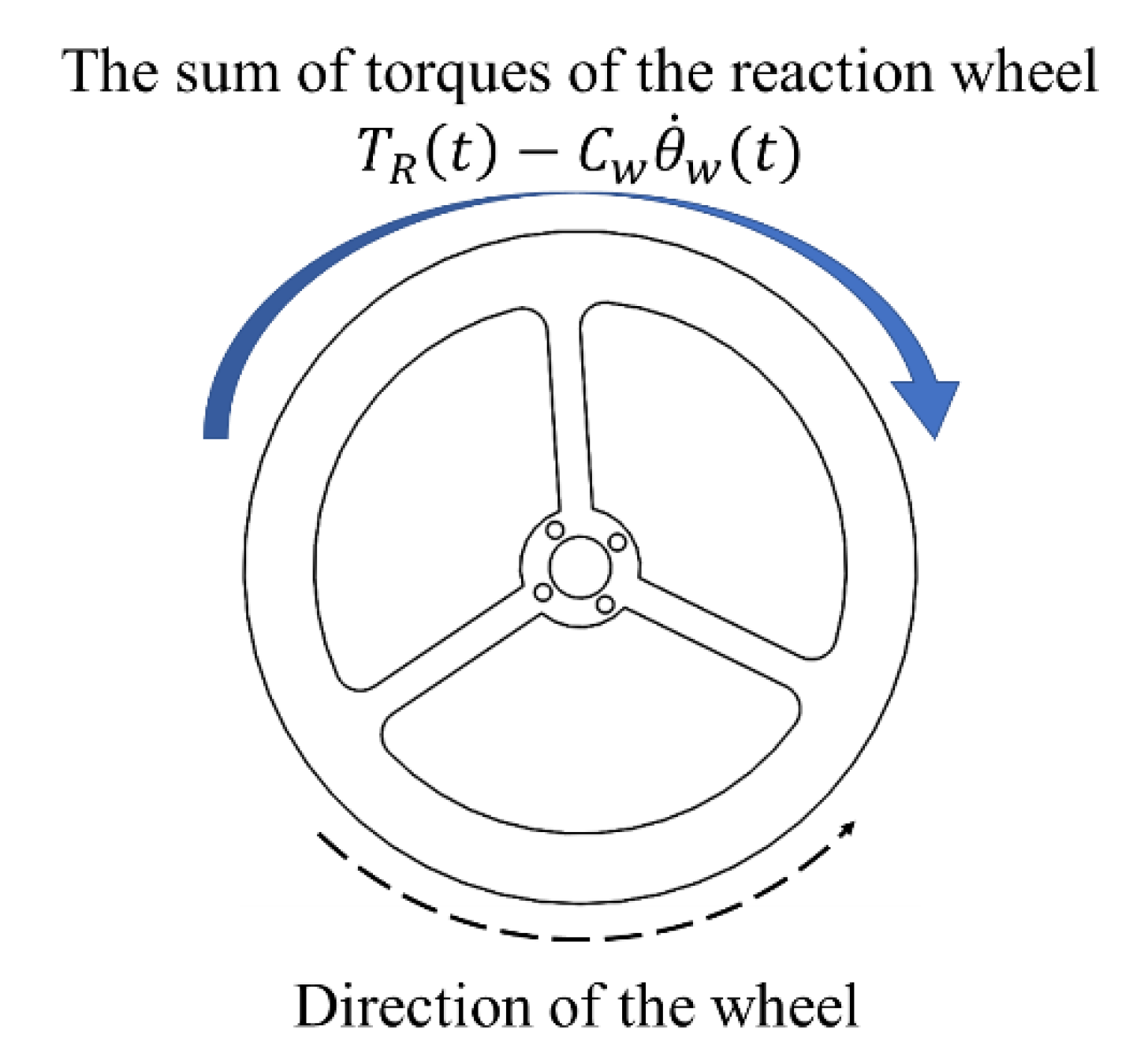
2.1. System Dynamics
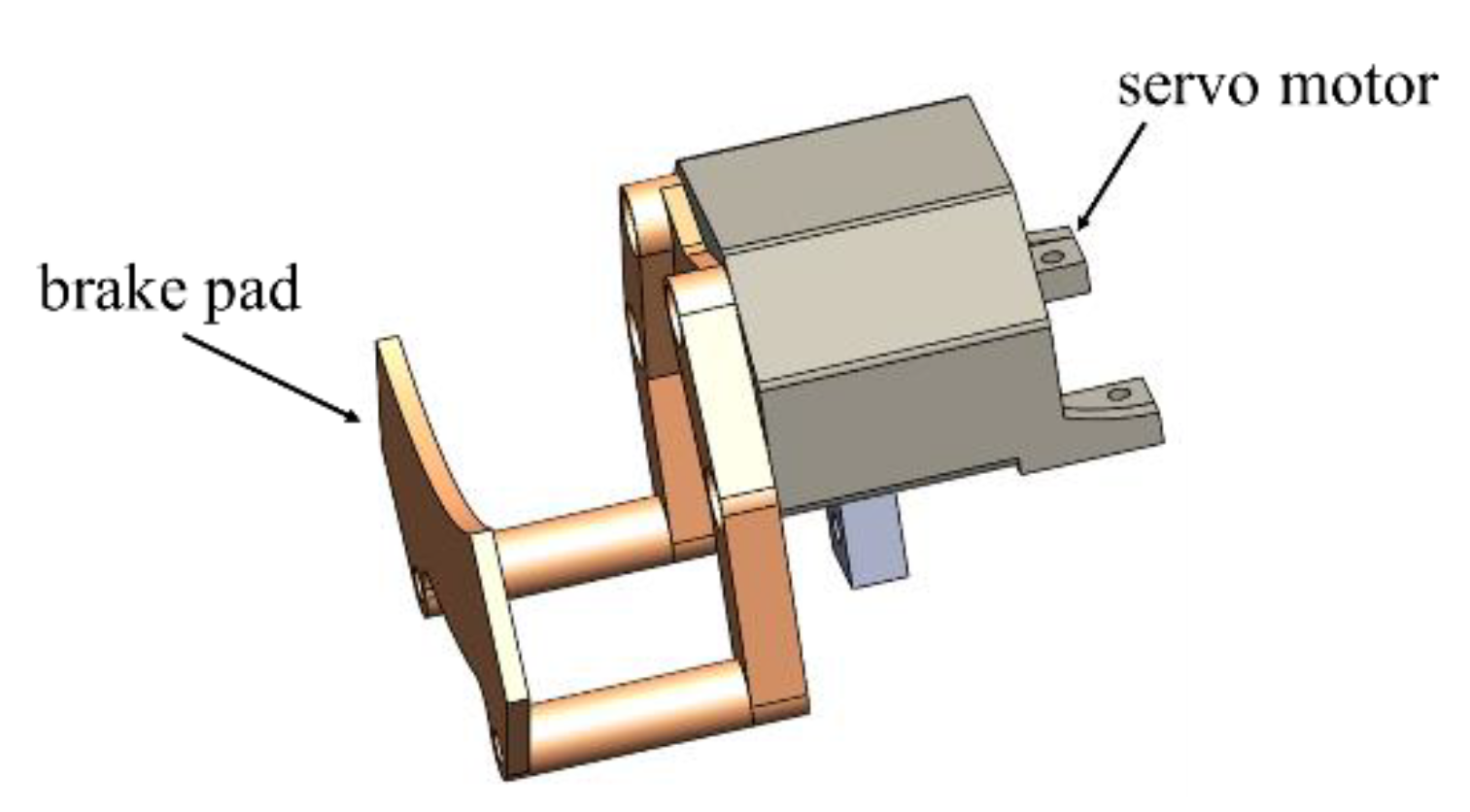
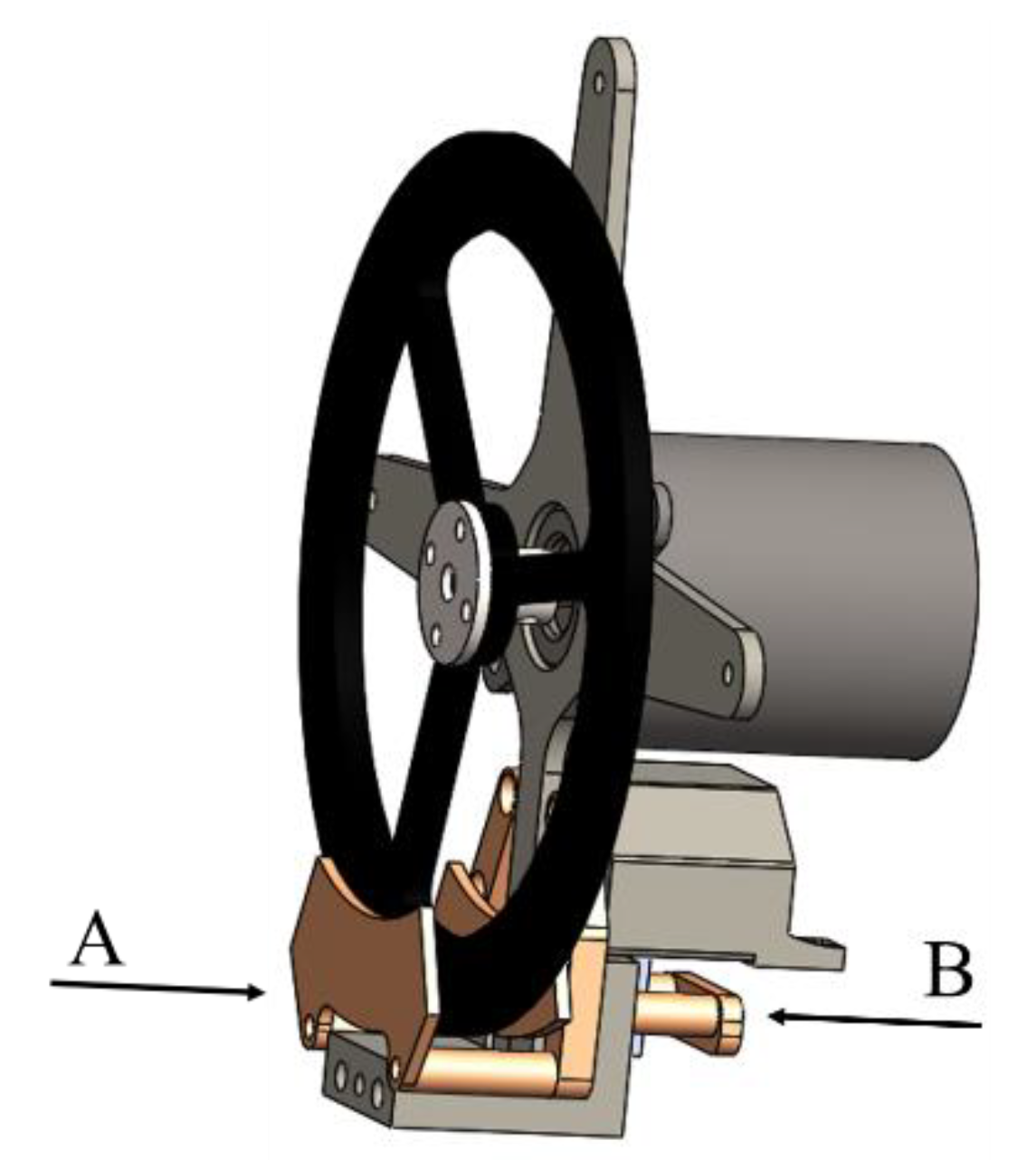
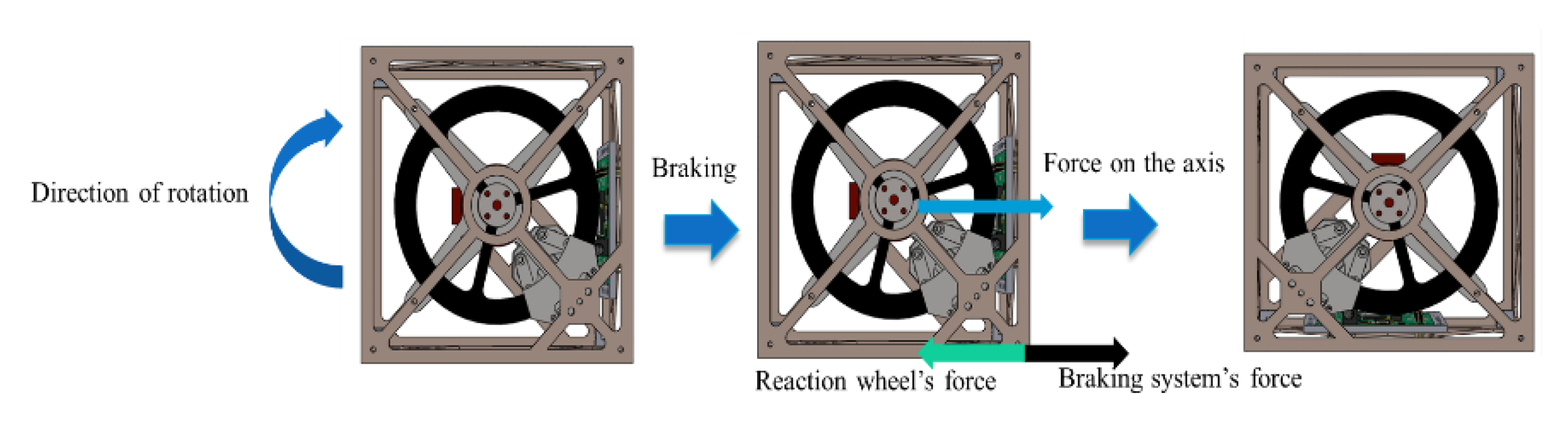
2.2. The Braking System
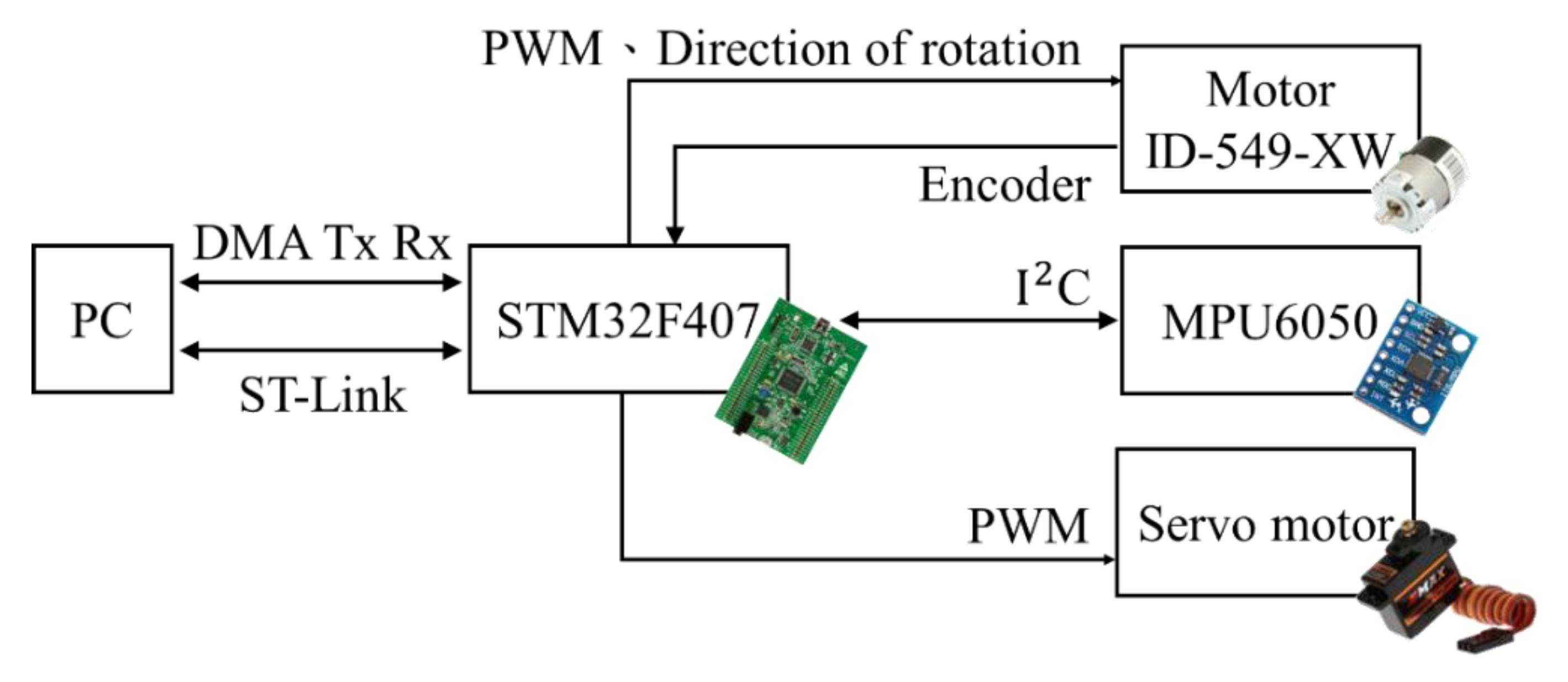
2.3. Signal Processing Units
3. Estimation and Control
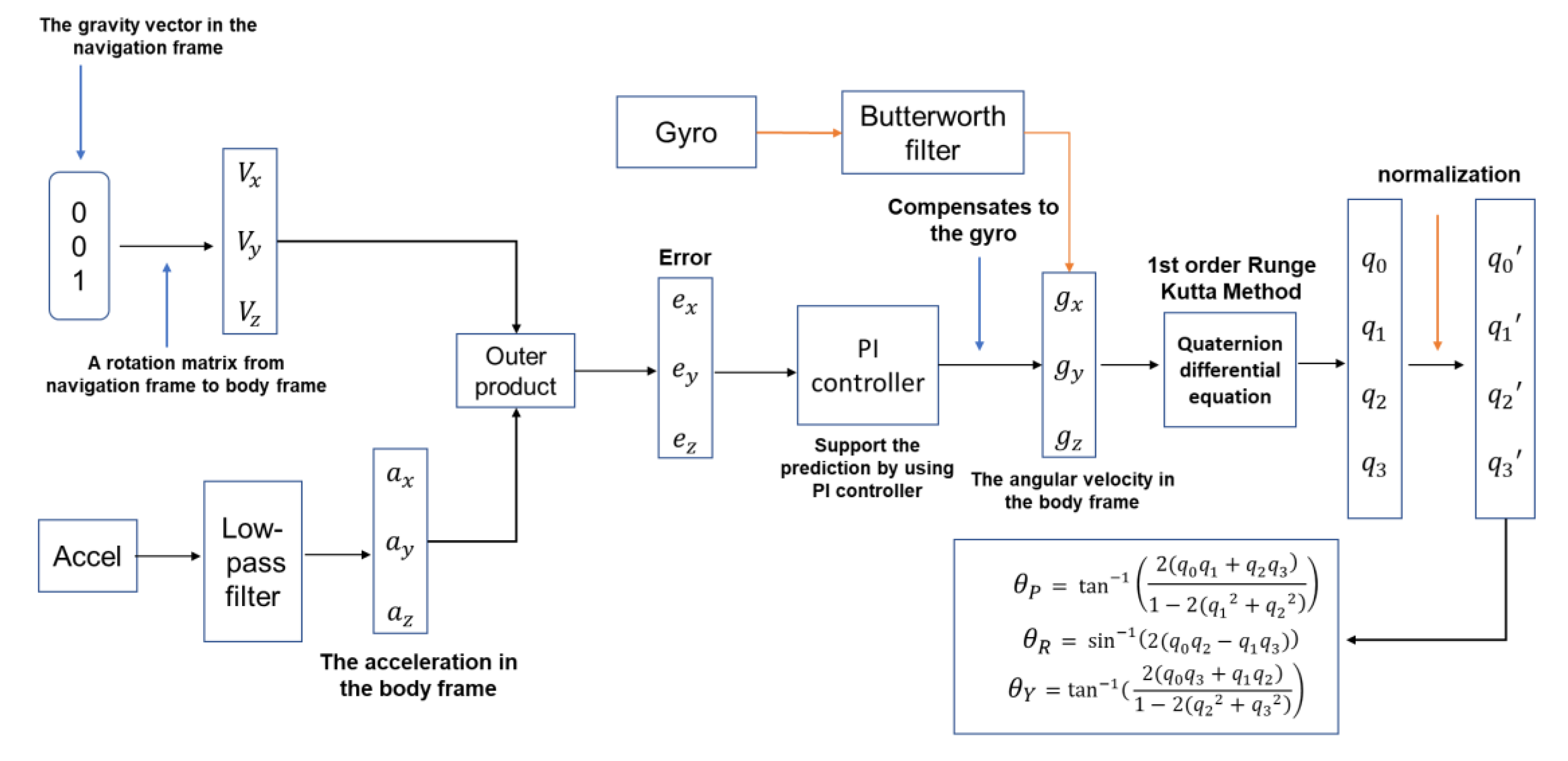
3.1. Attitude and Heading Reference System
3.2. Balancing Control
3.3. System Controllability
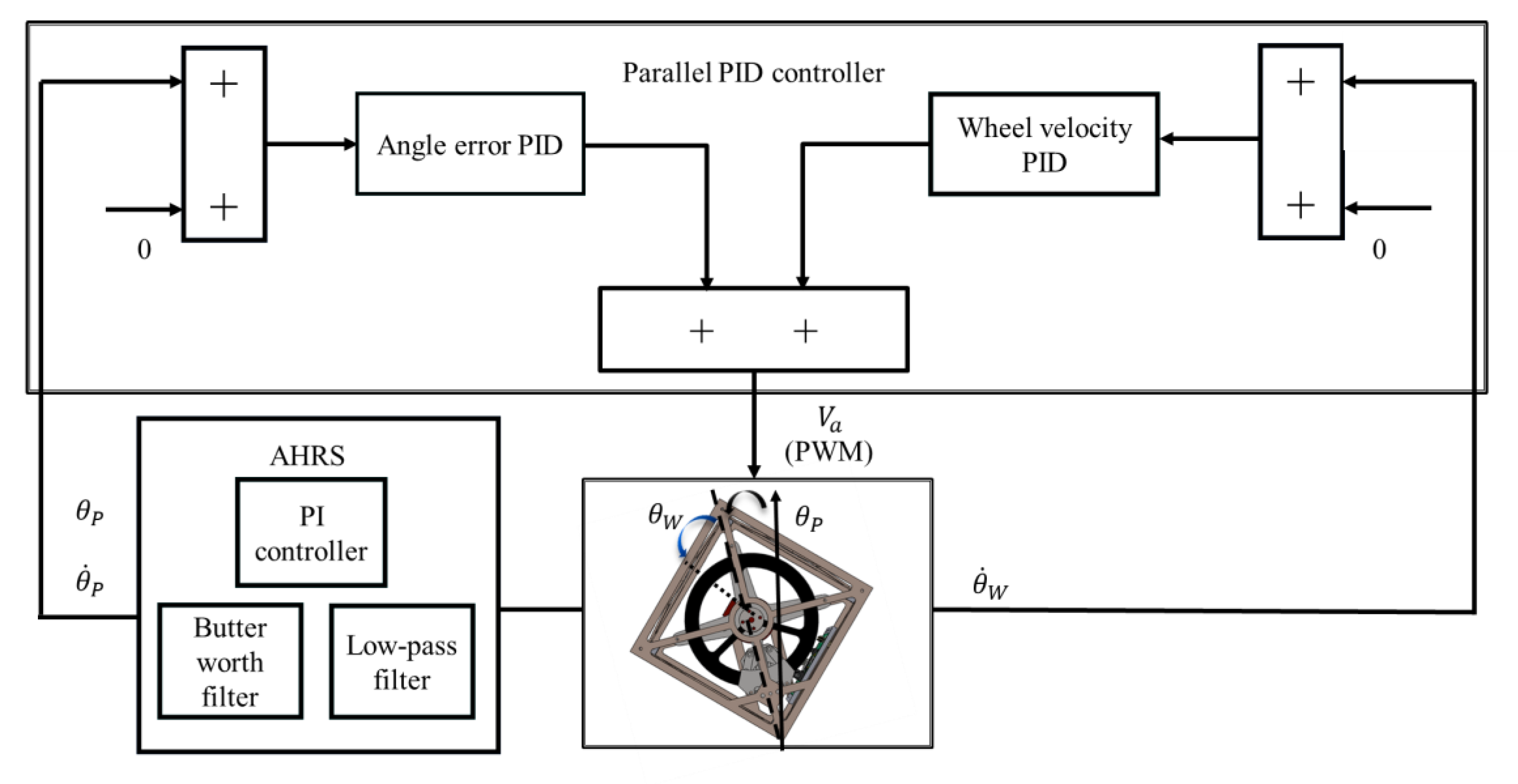
3.4. System Controller
3.5. Bouncing Control
4. Realization of the System
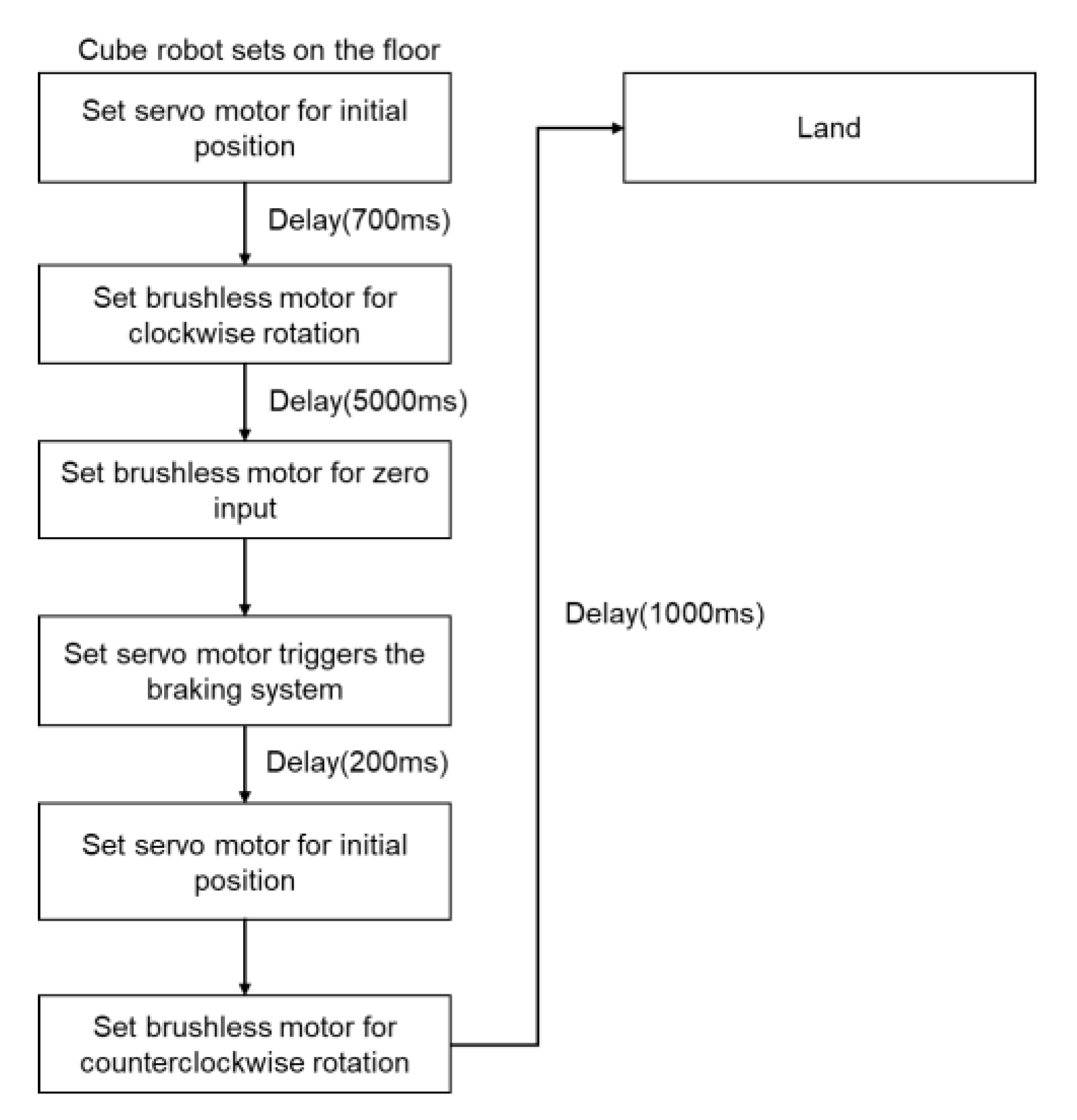
4.1. Bouncing Procedure
4.2. Bouncing Up and Balancing Procedure
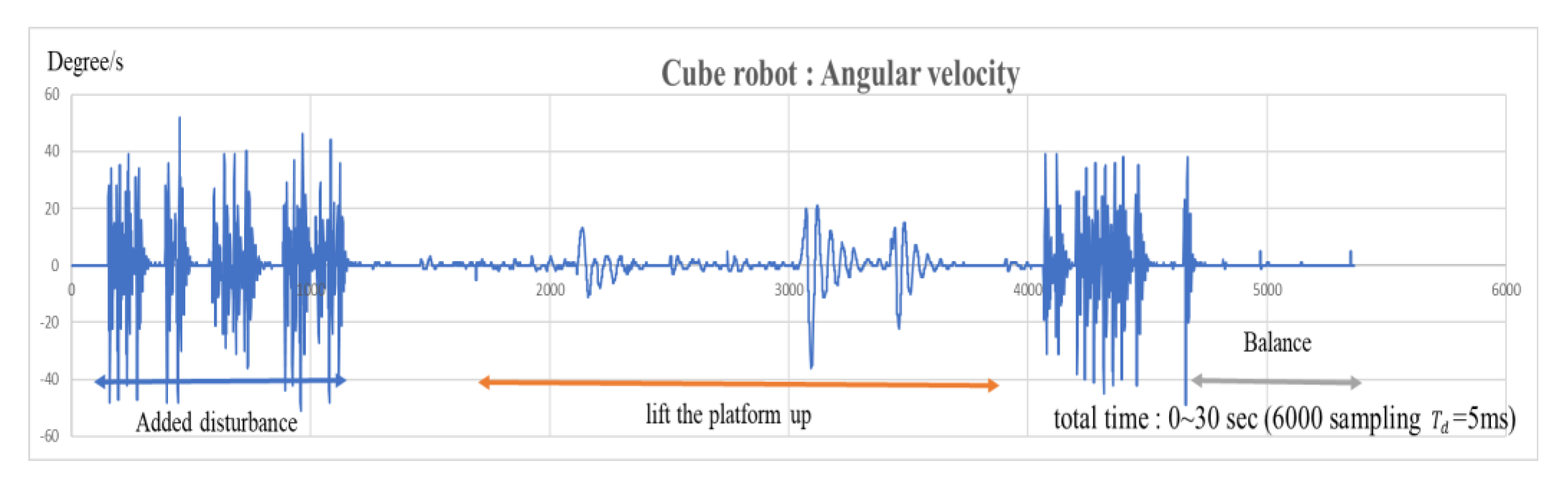
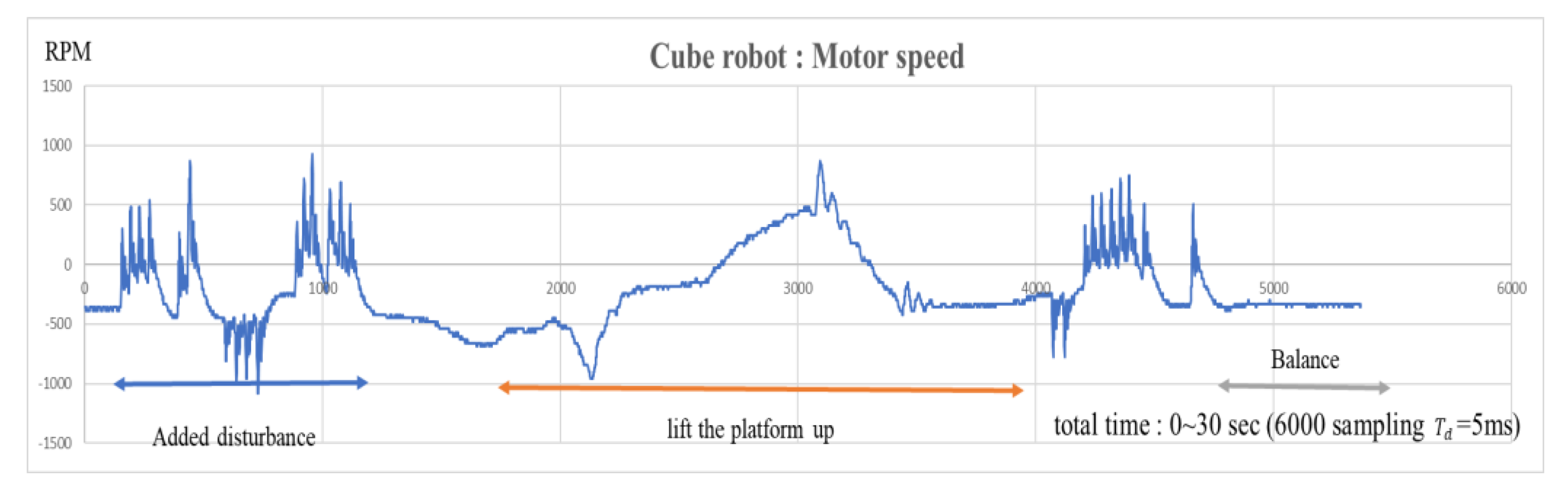
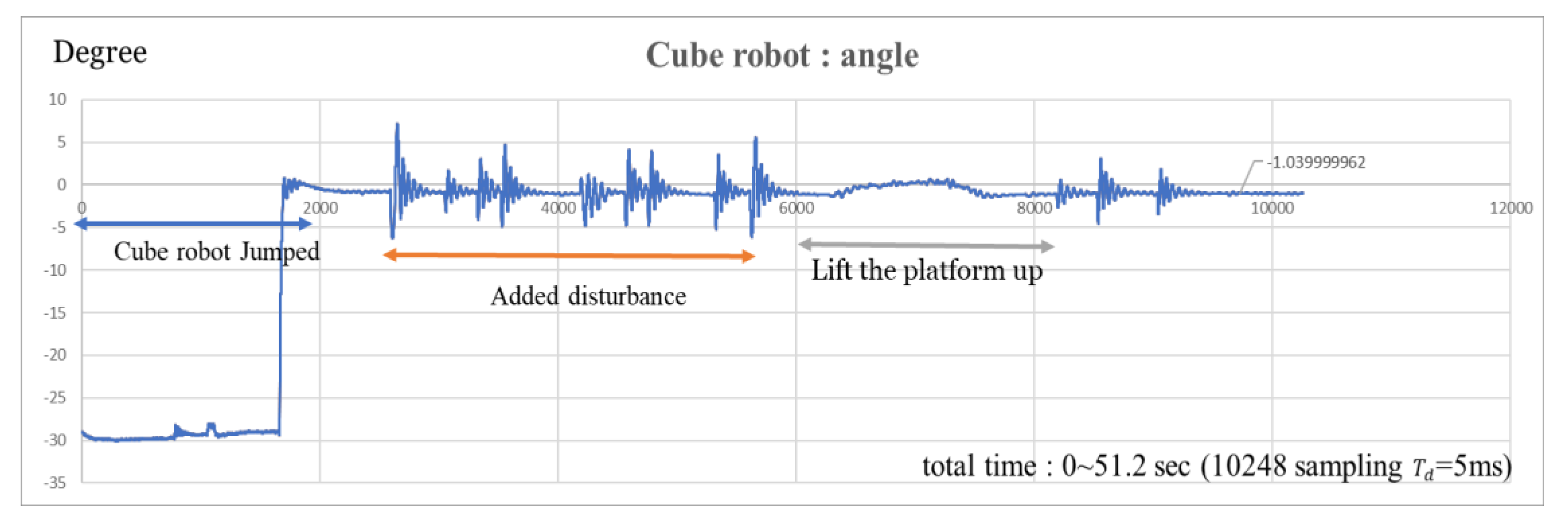
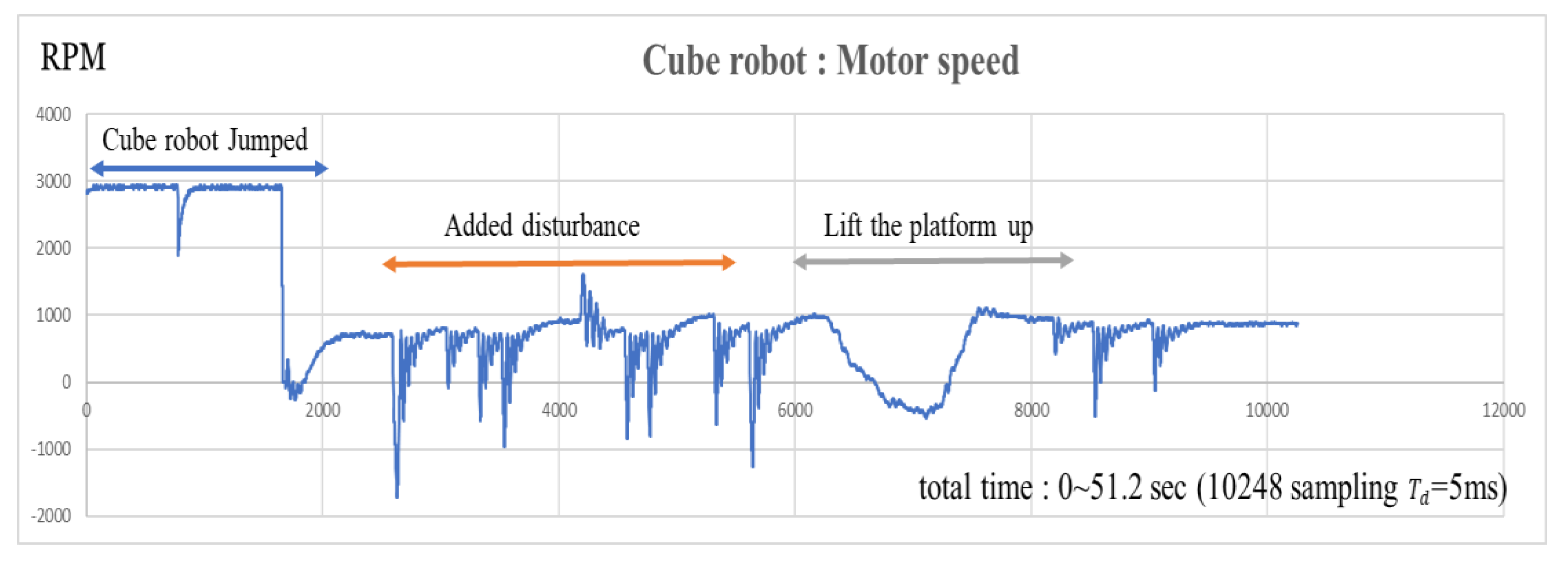
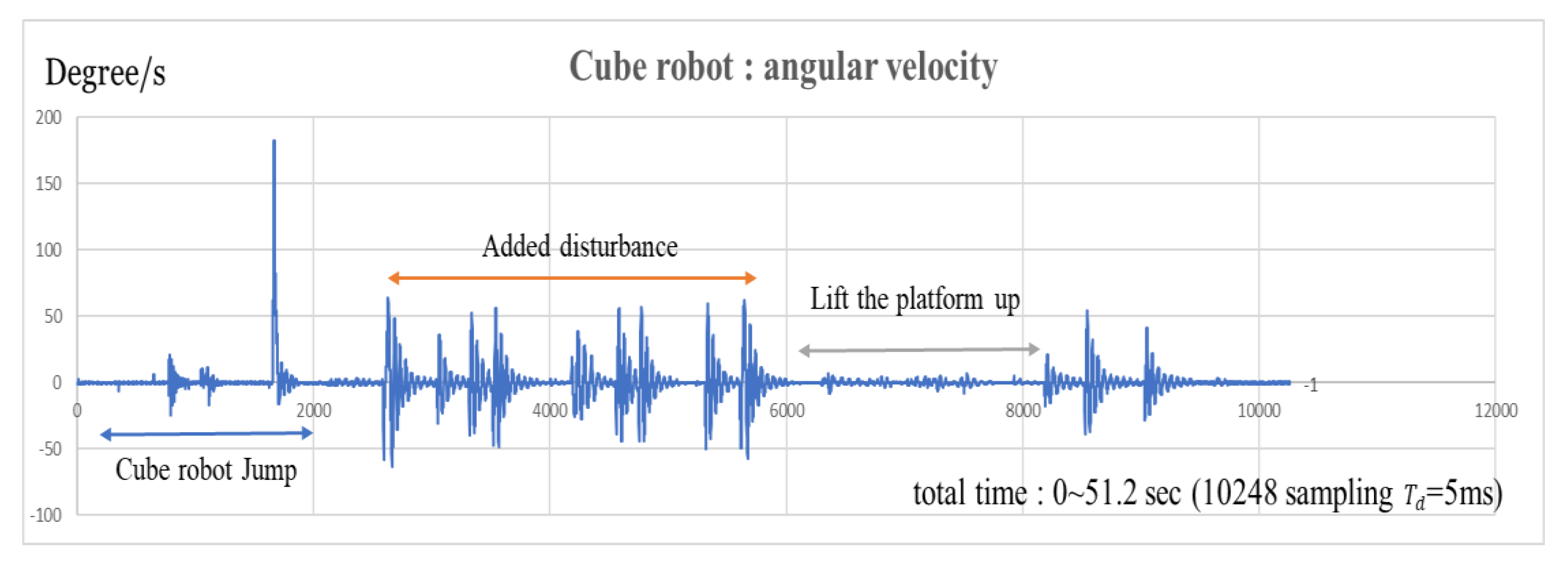
5. Experimental Results
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Gajamohan, M.; Merz, M.; Thommen, I.; Andrea, R. The cubli: A cube that can jump up and balance. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Algarve, Portugal, 7–12 October 2012; pp. 3722–3727. [Google Scholar]
- Brian, D.O.; Moore, J.B. Optimal Control: Linear Quadratic Methods; Courier Corporation: North Chelmsford, MA, USA, 2007. [Google Scholar]
- Chen, Z.; Ruan, X.; Li, Y.; Bai, Y.; Zhu, X. Dynamic modeling of a self-balancing cubical robot balancing on its edge. In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 29–31 December 2017; pp. 11–15. [Google Scholar]
- Chen, Z.; Ruan, X.; Li, Y.; Bai, Y.; Zhu, X. Dynamic modeling of a cubical robot balancing on its corner. In Proceedings of the MATEC Web of Conferences, Cheng Du, China, 16–17 December 2017; EDP Sciences: Paris, France, 2017; p. 0067. [Google Scholar]
- Chen, Z.; Ruan, X.; Li, Y.; Zhu, X. A sliding mode control method for the cubical robot. In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 544–548. [Google Scholar]
- Tian, L. Research on Fuzzy Control Algorithm of Cube System; Nanjing University of Science and Technology: Nanjing, China, 2006. [Google Scholar]
- Muehlebach, M.; Dandera, R. Nonlinear analysis and control of a reaction-wheel-based 3-D inverted pendulum. IEEE Trans. Control Syst. Technol. 2017, 25, 235–246. [Google Scholar] [CrossRef]
- Ang, K.; Chong, G.; Li, Y. PID control system analysis, design, and technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–576. [Google Scholar]
- Nazaruddin, Y.Y.; Andrini, A.D.; Anditio, B. PSO Based PID Controller for Quadrotor with Virtual Sensor. IFAC Papers OnLine 2018, 51, 358–363. [Google Scholar] [CrossRef]
- Fang, J.S.; Tsai, J.H.; Yan, J.J.; Tzou, C.H.; Guo, S.M. Design of Robust Trackers and Unknown Nonlinear Perturbation Estimators for a Class of Nonlinear Systems: HTRDNA Algorithm for Tracker Optimization. Mathematics 2019, 7, 1141. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Dempster, A.; Li, B.; Wang, J.; Rizos, C. A low-cost attitude heading reference system by combination of GPS and magnetometers and MEMS inertial sensors for mobile applications. J. Glob. Position. 2006, 5, 88–95. [Google Scholar] [CrossRef] [Green Version]
- Che-Yu, L. Realization of One-Dimensional Cube Robot Capable of Bounce and Self-Balancing Based on Linear Quadratic Regulator Control. Master’s Thesis, Cheng Kung University, Tainan City, Taiwan, 2008. [Google Scholar]
- Bar-itzhack, I.Y.; Oshman, Y. Attitude determination from vector observations: Quaternion estimation. IEEE Trans. Control Syst. Technol. 1985, 1, 128–136. [Google Scholar] [CrossRef]
- Sheppred, S.W. Quaternion from rotation matrix. J. Guid. Control 1978, 1, 223–224. [Google Scholar] [CrossRef]
- Krasjet. Quaternion and the Rotation in Three Dimensional; Department of Mathematics, Faculty of Science: Ankara, Turkey, 2018; pp. 24–35. [Google Scholar]
- Zupan, E.; Saje, M.; Zupan, D. Quaternion-based dynamics of geometrically nonlinear spatial beams using the Runge–Kutta method. Finite Elem. Anal. Des. 2012, 54, 48–60. [Google Scholar] [CrossRef] [Green Version]
- Farhangian, F.; Landry, R. Accuracy Improvement of Attitude Determination Systems Using EKF-Based Error Prediction Filter and PI Controller. Sensors 2020, 20, 4055. [Google Scholar] [CrossRef] [PubMed]
- Zhi-Wei, W. Reduction of Vehicle Vibration and Energy Consumption on Rugged Roads by H∞ Control Laws. Master’s Thesis, National Chiao Tung University, Hsinchu City, Taiwan, 2003. [Google Scholar]
- Bruton, S.L.; Kutz, J.N. Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficient | Value |
|---|---|
| (m/s2) | 9.81 |
| (kg) | 0.723 |
| (kg) | 0.162 |
| (kg ) | |
| (kg ) | |
| 0.11 | |
| 0.095 | |
| (kg ) | |
| (kg ) | 0.6 |
| (N ) | |
| 0.8158 | |
| (H) | 3.6 × |
| (v ) | |
| 30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, T.-L.; Chen, S.-J.; Chiu, C.-C.; Yan, J.-J. Nonlinear Dynamics and Control of a Cube Robot. Mathematics 2020, 8, 1840. https://doi.org/10.3390/math8101840
Liao T-L, Chen S-J, Chiu C-C, Yan J-J. Nonlinear Dynamics and Control of a Cube Robot. Mathematics. 2020; 8(10):1840. https://doi.org/10.3390/math8101840
Chicago/Turabian StyleLiao, Teh-Lu, Sian-Jhe Chen, Cheng-Chang Chiu, and Jun-Juh Yan. 2020. "Nonlinear Dynamics and Control of a Cube Robot" Mathematics 8, no. 10: 1840. https://doi.org/10.3390/math8101840
APA StyleLiao, T. -L., Chen, S. -J., Chiu, C. -C., & Yan, J. -J. (2020). Nonlinear Dynamics and Control of a Cube Robot. Mathematics, 8(10), 1840. https://doi.org/10.3390/math8101840