1. Introduction
One of the celebrated contributions to the field of thermoelasticity is the coupled theory, which was formulated by Biot in 1956 [
1], in which the author tackled one of the faults of the classical uncoupled theory of thermoelasticity by modifying the energy equation to contain a term representing the strain field. Since Biot’s model was based upon Fourier’s law, it failed to address the second defect of the classical uncoupled theory, which means that the generated heat waves still propagate with an infinite velocity. Hence, the behavior of Biot’s theory contradicts the laws of physics, especially for some problems such as utilizing laser heat sources, where their pulse duration is extremely short, and problems with large temperature gradients [
2,
3].
After Biot’s attempt, great efforts were made to obtain a generalization that addressed the defect found in the coupled theory; this point became the focus of attention for those interested in thermoelasticity. Authentic progress was made in 1967 when Lord and Shulman [
4] formulated a new model based on Cattaneo’s approach [
5,
6] instead of Fourier’s Law. This theory was followed by several essential generalizations [
7,
8,
9]; most of these theories were dependent on adjusting the heat equation. The DPL model or the generalized theory with dual-phase-lag is one of the essential generalizations developed by Tzou [
10,
11], where the energy equation was modified to contain two distinct phase-lags: one symbolizes the temperature gradient, while the other symbolizes the heat flux. Several authors have employed the DPL model to study thermoelastic waves under the effect of different fields [
12,
13,
14,
15,
16,
17,
18,
19].
Since the discovery of lasers, many applications in physics, mechanics, and engineering have been implemented based on their various properties, especially in materials processing, such as drilling of holes, spot welding, glazing of materials, and surface-hardening scribing [
20]. Several authors have employed the generalized theories of thermoelasticity to study the thermoelastic interactions induced by a pulsed laser, considering different aspects [
21,
22,
23,
24]. Zenkour and Aboelregal [
25] studied the fractional influences in a half-space solid exposed to non-Gaussian laser radiation by utilizing the two-temperature generalized model with a fractional-order energy equation. Bassiouny et al. [
26] investigated the thermoelastic conduct of an elastic semi-infinite solid under the influence of a pulsed laser, by applying the theory of fractional-order strain thermoelasticity. Allam and Tayel [
27] applied five different theories to study the interaction caused by surface absorption of a pulsed laser in a functionally graded thermoelastic semi-infinite medium. Abbas and Marin [
28] employed the Lord and Shulman model to study the effect of the relaxation time in a 2D thermoelastic semi-infinite solid illuminated by a laser pulse. Abouelregal and Zenkour [
29] employed the generalized two-temperature thermoelastic theory to discuss thermoelastic responses in a half-space, whose pounding plane was exposed to a laser pulse. Tayel and Hassan [
30] and Tayel [
31] studied the thermoelastic interaction induced by both surface and volumetric absorption techniques, respectively, in a one-dimensional semi-infinite medium, considering the absence and existence of cooling, by employing various thermoelasticity theories.
Integral transforms have been effectively employed for solving many problems in physics, applied mathematics, and engineering sciences. Although Laplace transform is considered one of the most essential integral transformations applied to solve coupling problems in the theory of thermoelasticity, its inverse is very difficult to obtain using the usual methods. This difficulty has prompted those interested in thermoelasticity to apply numerical methods or to use asymptotic expansion techniques that are adequate for short times. This technique was used in the context of the coupled theory by Hetnarski [
32,
33] and applied by several authors to some generalized thermoelastic problems [
34,
35,
36].
The main goals of this work are to study the thermoelastic interaction induced by the volumetric absorption technique of a laser pulse in a 2D semi-infinite medium and to investigate the effects of the phase-lag parameters of the DPL theory of thermoelasticity on the existence and absence of a cooling effect. The medium is studied under the influence of a laser beam, the spatial and temporal profiles of which are considered Gaussian. The medium surface is exposed to temperature-dependent heat losses and is considered traction-free.
2. Problem Formulation
A thermoelastic, isotropic, and homogeneous 2D semi-infinite medium is considered under the influence of a laser beam that is incident-normal to a small specified region of the medium’s surface. The medium is initially at a uniform temperature and its surface is taken as stress-free and assumed to be exposed to temperature-dependent cooling. The cylindrical coordinate system is utilized in the problem, with the z-axis oriented inward and vertically.
According to the heating process, which is considered axisymmetric, all quantities will depend on
,
and
only and, thus, the displacement vector
will possess the following components:
Consequently, the nonvanishing strain components are
Thus, the dilatation
takes the form
Following [
10,
11], the linear heat equation for a homogeneous and isotropic body in the context of the DPL model is given as
where
stands for thermal conductivity;
for density;
for the absolute temperature,
, for the specific heat at constant strain;
for the reference temperature, which is chosen such that
and
,
for phase-lags of the temperature gradient and the heat flux, respectively, where
. Moreover,
, in which
and
are lamé’s constants and
is the thermal expansion.
For volumetric absorption in a 2D medium,
is given as
where
denote the transition coefficient of the illuminated surface, the maximum value of the laser intensity, the temporal laser pulse shape, a spatial constant, and the absorption coefficient of the material, respectively.
The axially symmetric equations of motion in terms of displacements and absence of body forces are
Furthermore, the nonvanishing stresses are determined by
where
represents the increment of the temperature.
Due to the foregoing formulation, the boundary conditions will be
where
represents the coefficient of the heat transfer responsible for cooling, and
is the surface temperature.
Additionally, the initial conditions are
Now, we introduce the following nondimensional variables
where
,
.
For seeking the simplicity primes will be dropped, and thus Equations (3), (5) and (6) in the nondimensional forms will be
where
,
.
Combining Equations (15) and (16) by applying the operators
for (15) and
for (16), then adding them, one gets
In the nondimensional form, the stress components become
In addition, Equation (11) will be written as
3. Problem Solution
The specific conditions in Equation (12) and the basic Equations (14) and (17) predict that the double-transformation Laplace and Hankel integral transforms [
37] are more appropriate to be applied for
and
, respectively, in which the transformation is given as
where
is the Laplace transform variable, the superscripts dash and tilde indicate the Laplace and Hankel transformation of
, respectively, and
is the Bessel function of the first kind of order
in which
Thus, Equations (14) and (17) become, respectively
where
is the Laplace transform of
, and
is the Hankel transform of order zero of
.
The elimination of
between Equations (24) and (25) gives
where
,
.
Consequently, Equation (26) can be written as
where
are the roots of the following auxiliary equation:
The solution of Equation (27) after considering the behavior of
as
is given as
where
represents the coefficient of the particular solution of Equation (27); using the undetermined coefficients method, one gets
and thus
In a similar fashion, the elimination of
between Equations (24) and (25) gives
Solving (32), one can obtain
where
is the coefficient of the particular solution of (32).
Introducing Equations (29) and (33) into Equation (25) yields
Applying (23) to Equation (16), one gets
Substituting for
and
in Equation (38), then solving the nonhomogeneous second-order ordinary differential equation, this gives
where
.
Applying (23) on the nondimensional form of Equation (2) and making use of the relation
for
it follows
where
represents the Hankel transform of
.
Now, in order to obtain
, we shall substitute Equations (37) and (39) into Equation (40); one gets
The stress components of the problem can be obtained by applying (23) on (18), (19), (20) and (21); this gives the following relations:
From the stresses above, only the stresses that related to the boundary conditions will be picked out to be calculated; hence, introducing Equations (31), (37), (39), and (41) into (43) and (45), it follows
where
Now making use of Equations (31), (46), and (47), Equations (22) can be written as
where
Solving (48), (49), and (50), one gets
Substituting Equations (51)–(53) into Equation (31) and setting
, this gives the surface temperature
as follows:
7. Results and Discussion
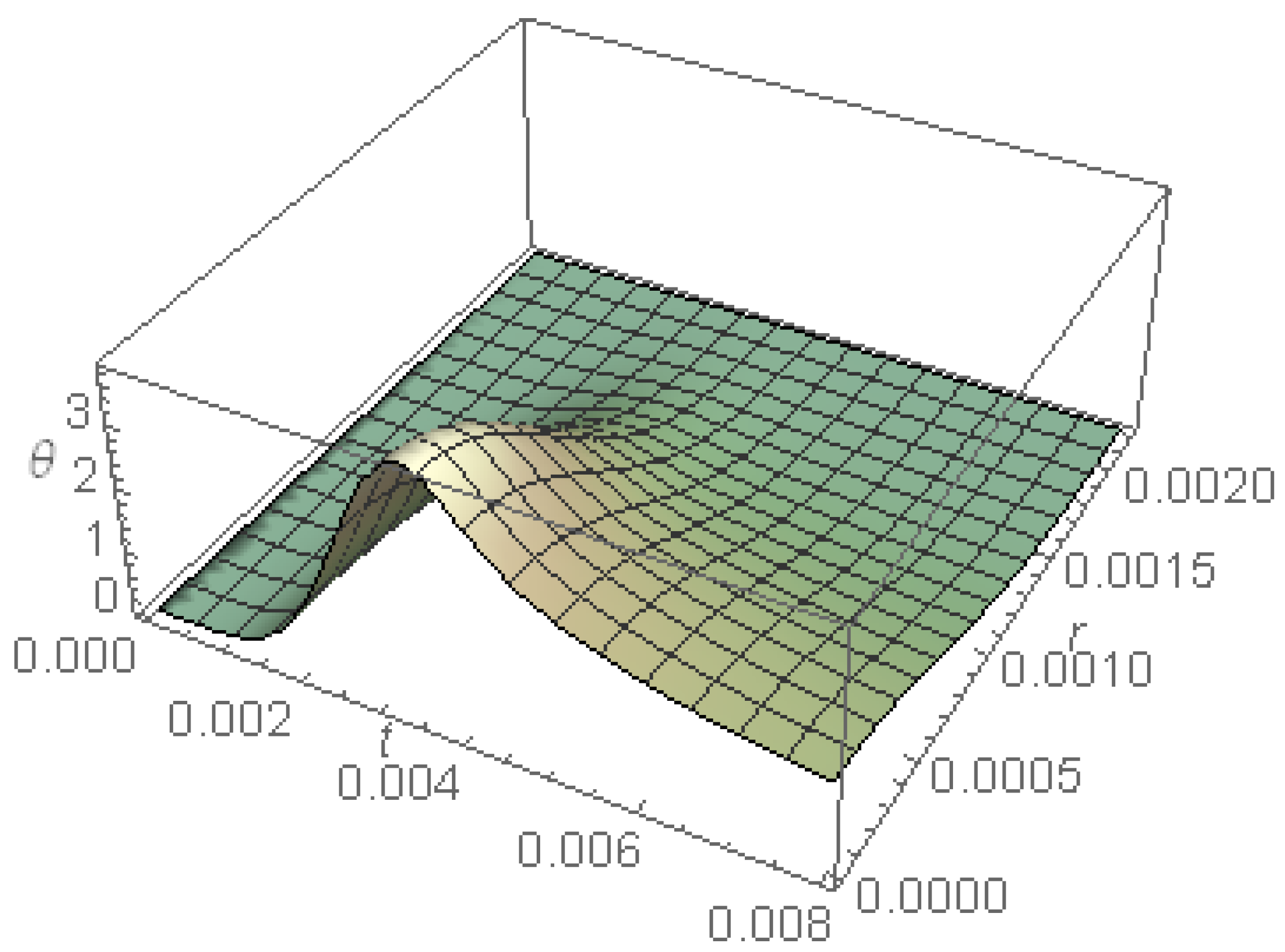
Figure 1 represents the surface temperature
calculated for
in the absence of cooling. The figure shows that the surface temperature increases until it reaches its maximum, which clearly shifted to a greater time than that of the maximum of
. After
reaches its maximum, it begins to decrease and does not reach the zero-value even after the pulse is switched off. Moreover, in the radial direction,
has a weak gradient near the surface; this gradient becomes stronger as
r-increases until the temperature vanishes. The behavior of the temperature depends on two main occurrences, namely, the conductivity of the material and the absorbed energy, where at the beginning of the illumination process and due to the increased pulse, the absorbed energy will be greater than the conductivity of the material, so
increases; this behavior lasts up to when the absorbed energy is matched to the conducted energy; exactly at this time, the surface temperature attains its maximum. After that, and according to the chosen pulse shape, the absorbed energy begins to decrease, and the conductivity of the material gains the upper hand; this leads to a decrease in the surface temperature. After the pulse is switched off, the gradient of the temperature becomes smaller than that during the pulse, which is due to the absence of the laser radiation; this leads to a small gradient and, consequently, small conduction of the heat energy.
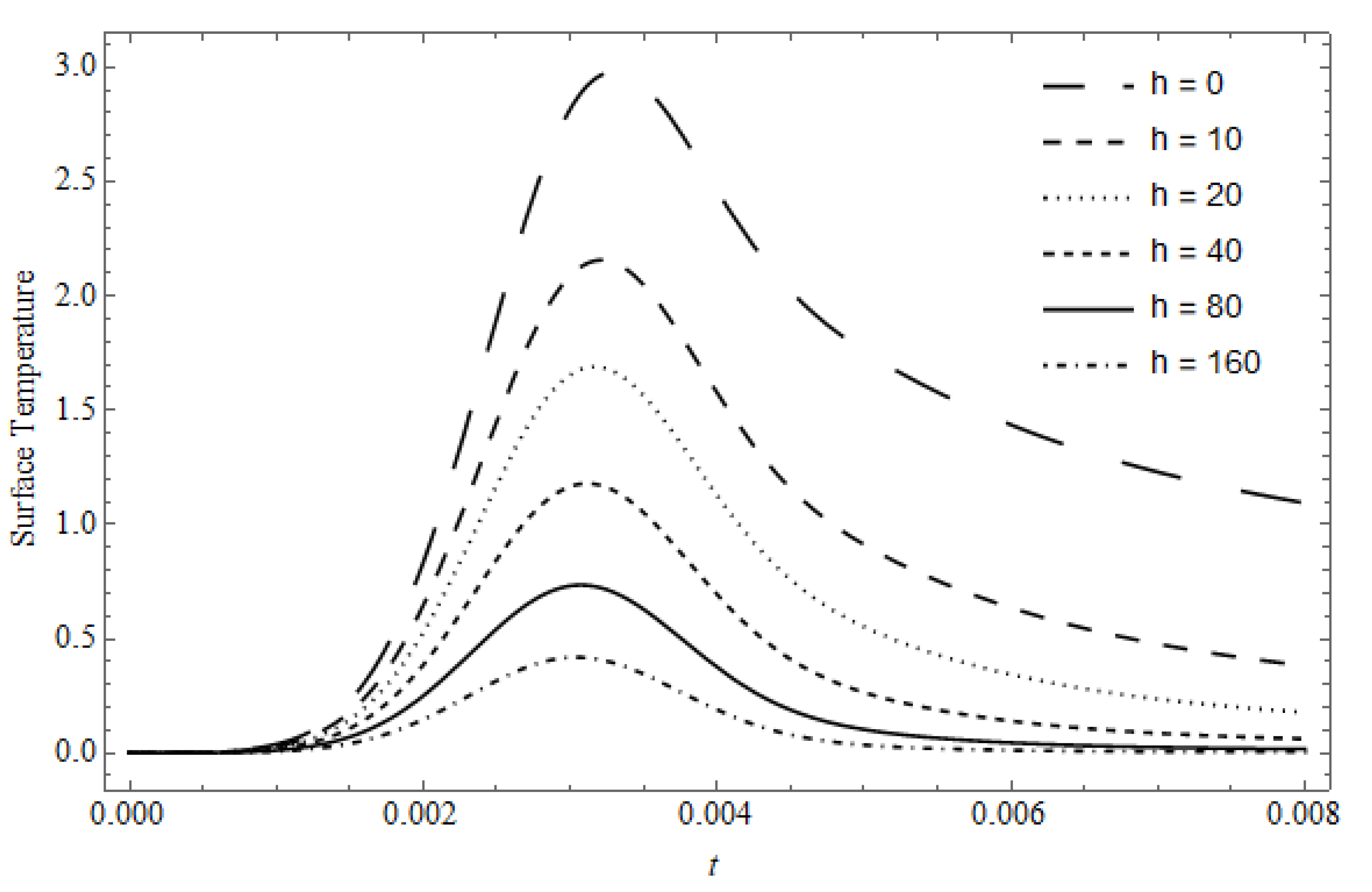
Figure 2 represents the time-dependent surface temperature, with
as a parameter, calculated for
and
. As expected, the surface temperature clearly decreases with increasing values of the cooling coefficient; moreover, as the cooling coefficient takes small values, the maximum value of the surface temperature is shifted towards greater time than that of the maximum of
Beside the general decrease in surface temperature with increasing
, its behavior after it reaches its maximum, and at the times where the laser is switched off, decreases until the surface temperature approximately takes the shape of
This behavior is due to the contribution of the cooling effect together with the conductivity of the material, especially after the laser is switched off and the absorbed energy is stopped.
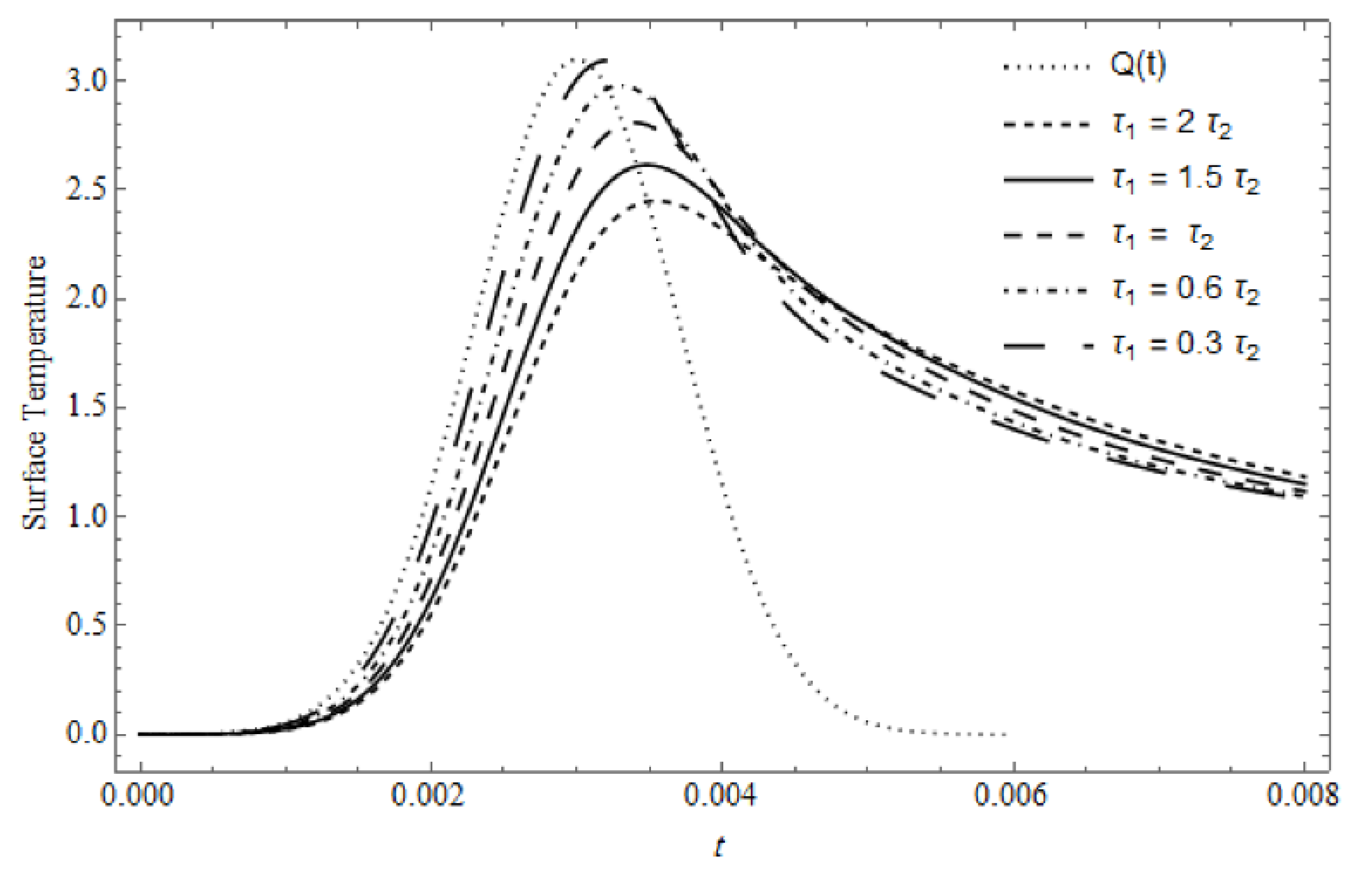
Figure 3 represents the time-dependent laser pulse shape and the surface temperature, with
as a parameter in the absence of cooling, calculated for
. The figure shows that compared to the chosen temporal pulse shape,
, for
, the maximum surface temperature becomes smaller and shifts evidently towards greater time than that for
. This means that the surface temperature for
needs more time and consumes more energy to reach its maximum; this behavior is similar to the behavior that appears in [
31] for the classical coupled theory.
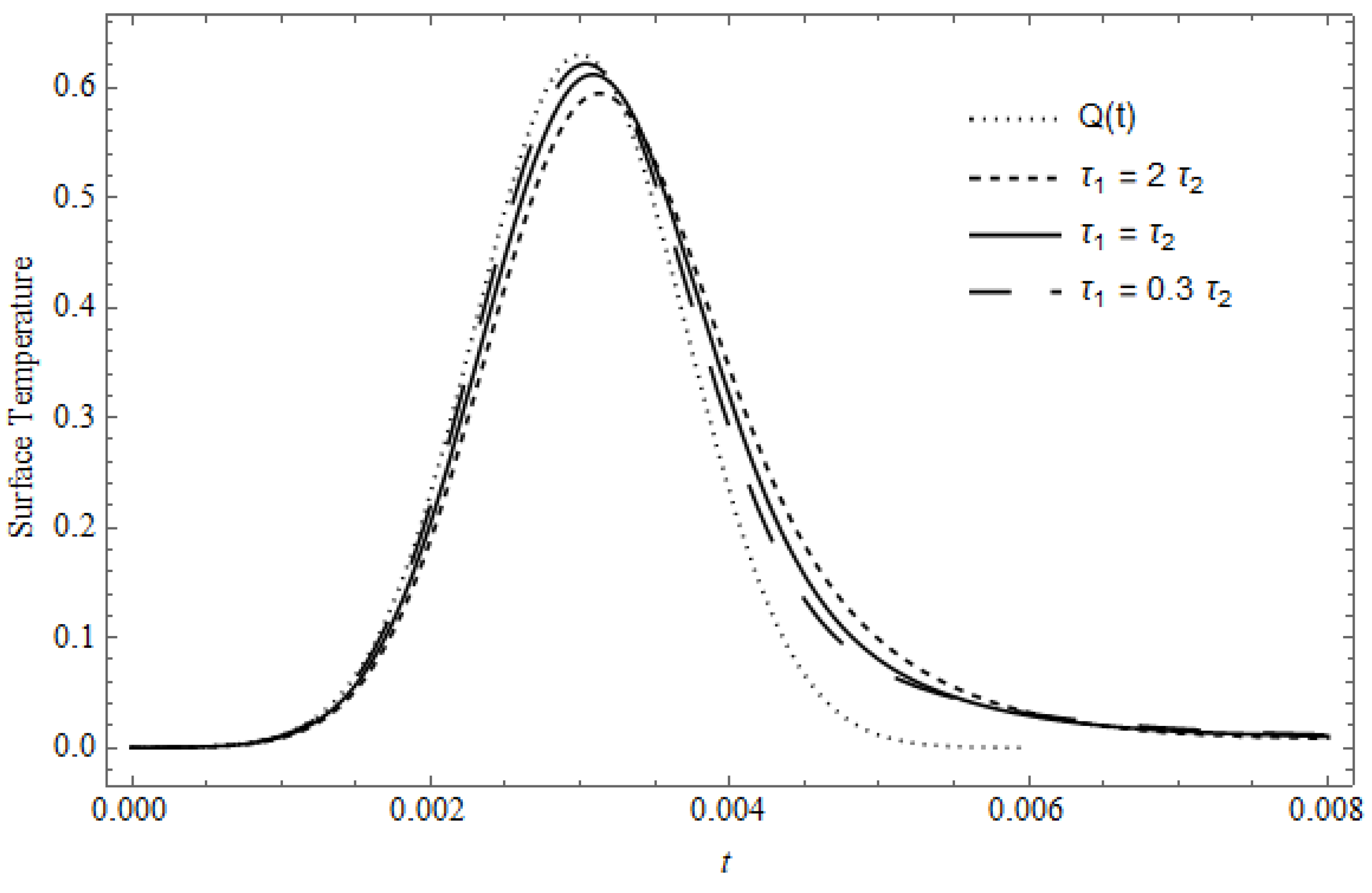
Figure 4 represents the time-dependent laser pulse shape and the surface temperature, with
as a parameter in the presence of heat losses, calculated for
,
, and
. As seen, the effect of cooling is very pronounced, where the values of the surface temperature are decreased and its maximum is slightly shifted from the time of the maximum of
. Moreover, after the laser is switched off, the temperature approximately reaches zero, which does not occur in the absence of cooling; these behaviors are due to the cooling and the conductivity of the material. The behavior of this figure is slightly similar to the behavior of the previous figure, where the time needed to reach the peak is slightely shifted towards greater time for
than for
Figure 5 represents the temperature
as a function of
and
in the absence of cooling, calculated for
and
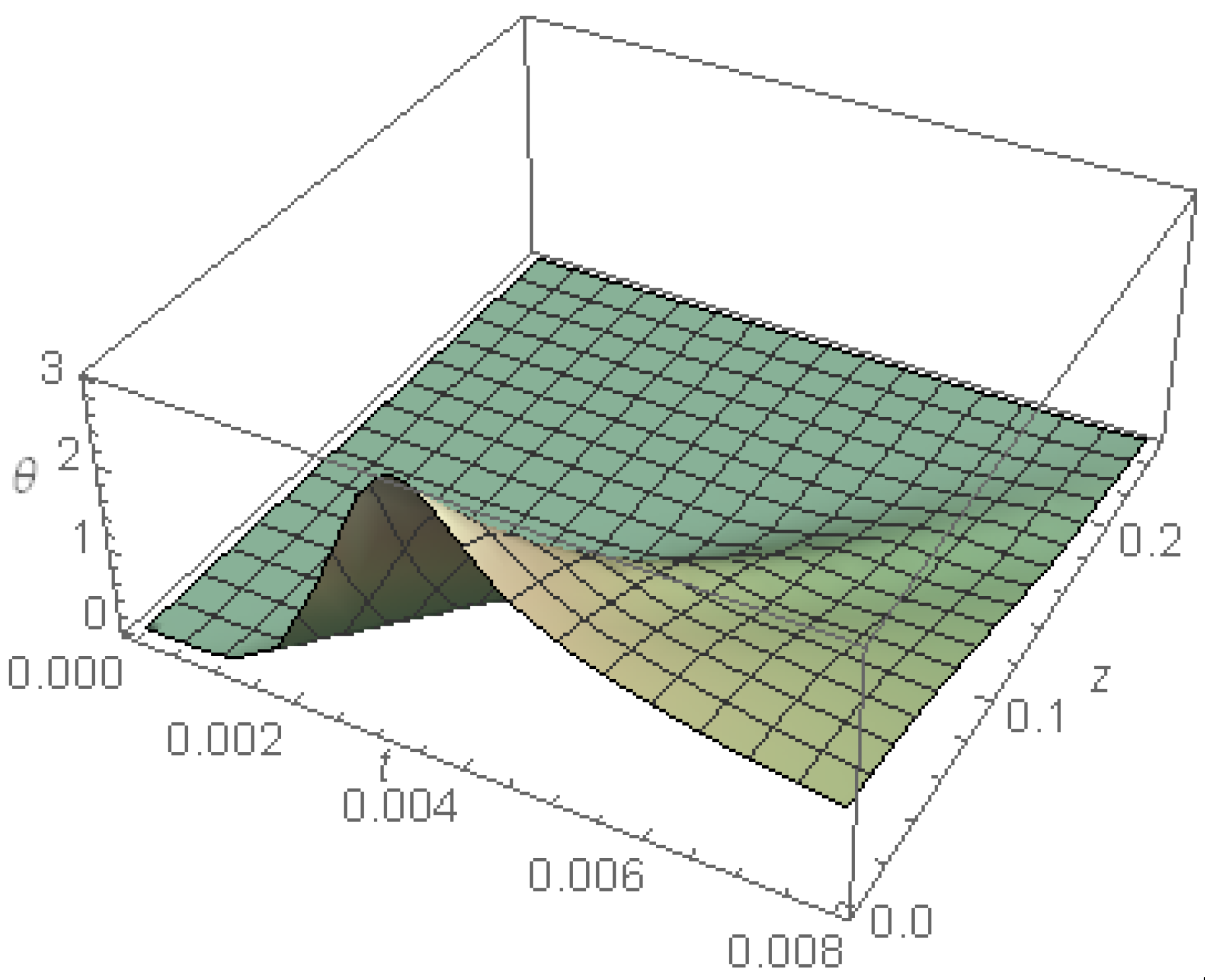
. The finite velocity that distinguishes the DPL model appears evidently through the strong gradient at all locations, especially before the pulse is switched off. After the temperature reaches its maximum, a small temperature gradient begins to appear near the surface. The figure shows that the temperature is fully compatible with the time pulse profile, where the temperature increases until it reaches its maximum and then begins to decline. The temperature shows its highest value at the irradiated surface; this value decreases as z increases until it vanishes.
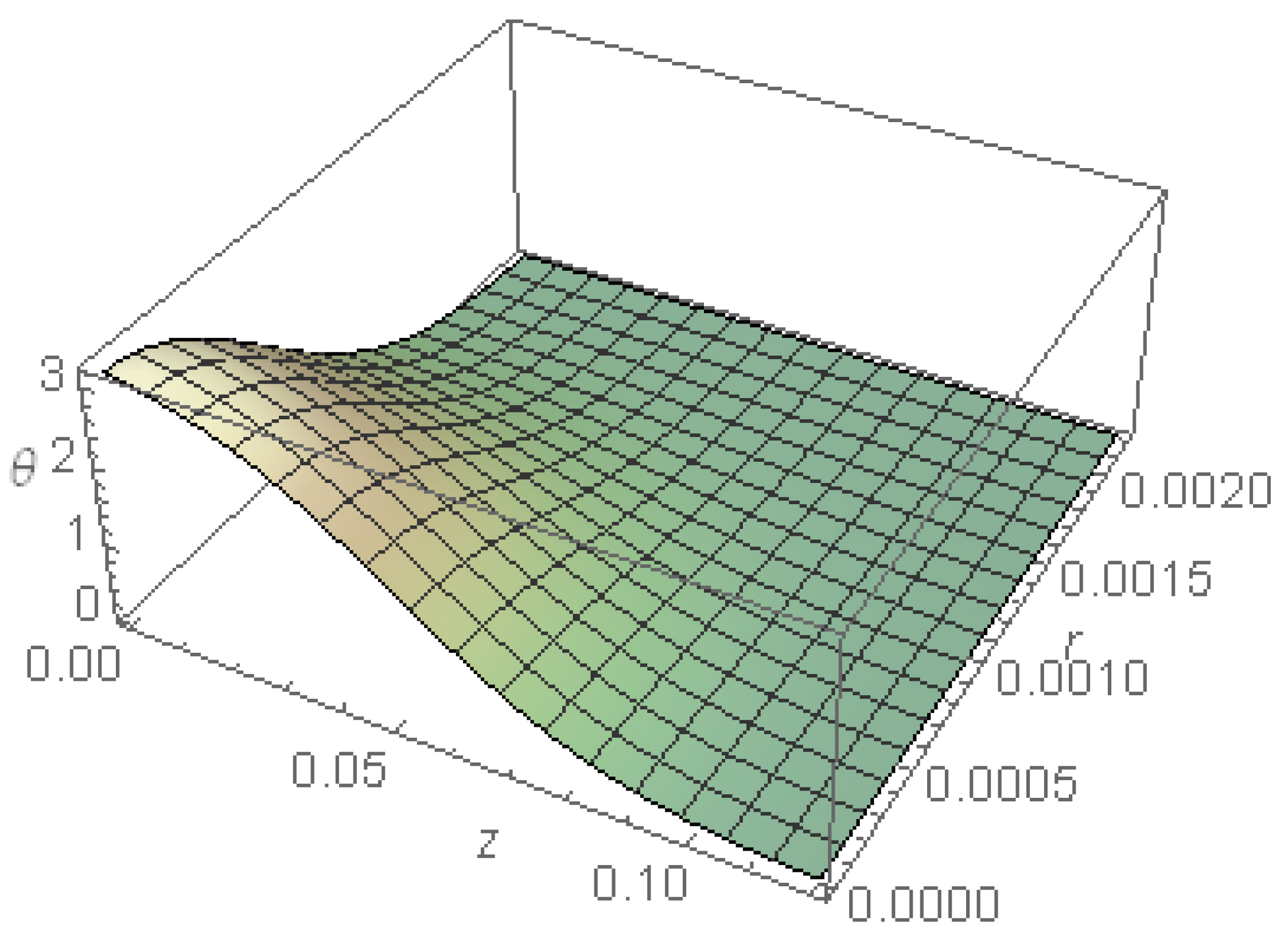
Figure 6 represents the temperature of the medium as a function of
and
in the absence of cooling, calculated for
and
. It is evident that the maximum temperature occurs at the illuminated surface and the temperature has a weak gradient in a small region adjacent to the target surface, as
and
increases; the gradient becomes strong until the temperature vanishes. This figure agrees with the previous figure, for which the finite velocity of the employed model evidently appears.
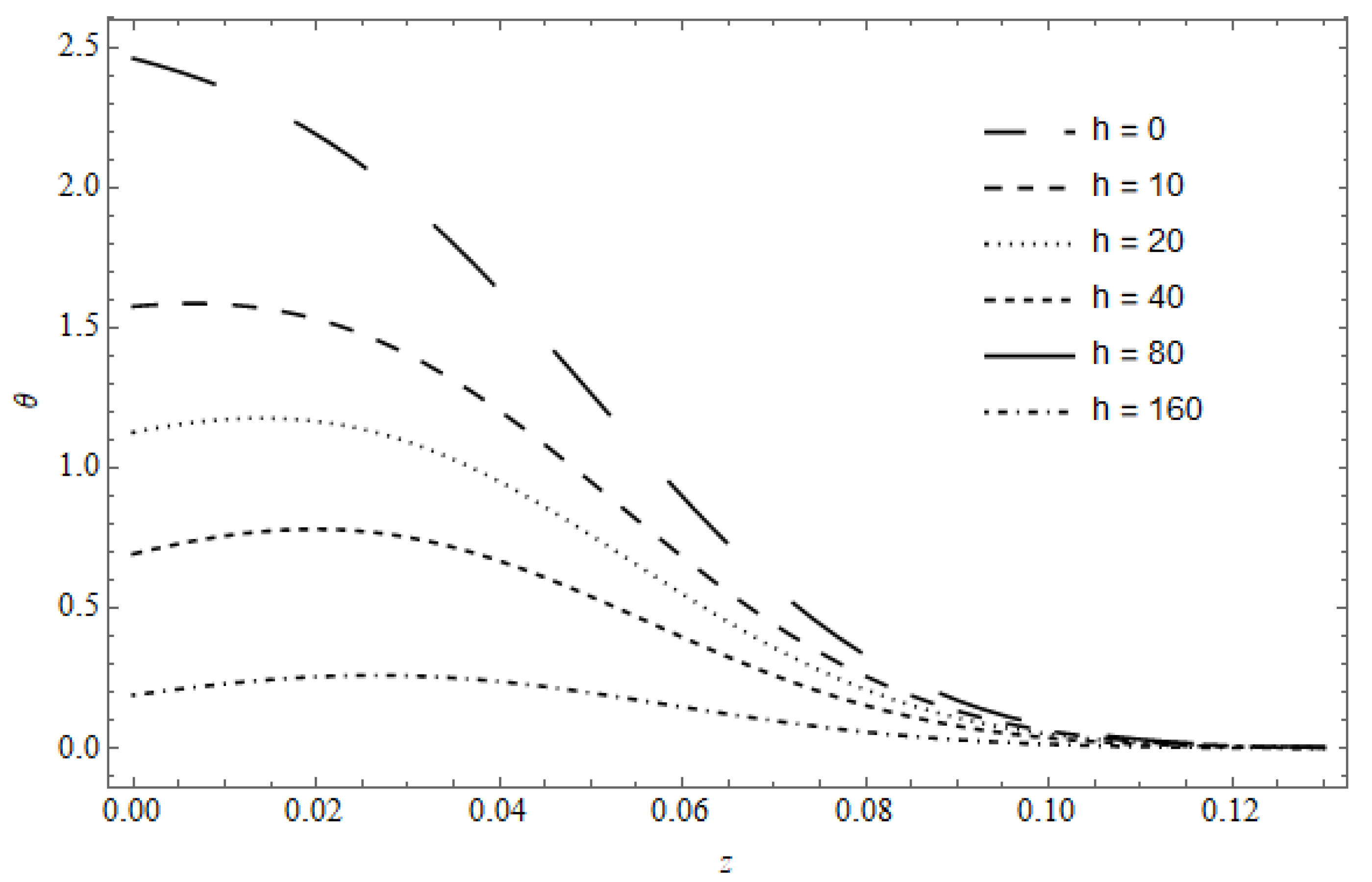
Figure 7 represents the temperature versus
z, with
as a parameter, calculated for
and
. As expected, the temperature decreases as
h increases; moreover, a weak gradient near the surface is observed; this gradient moves deeper into the medium as
increases. The maximum temperature is slightly shifted, nearer to the surface; this behavior can be observed from the value
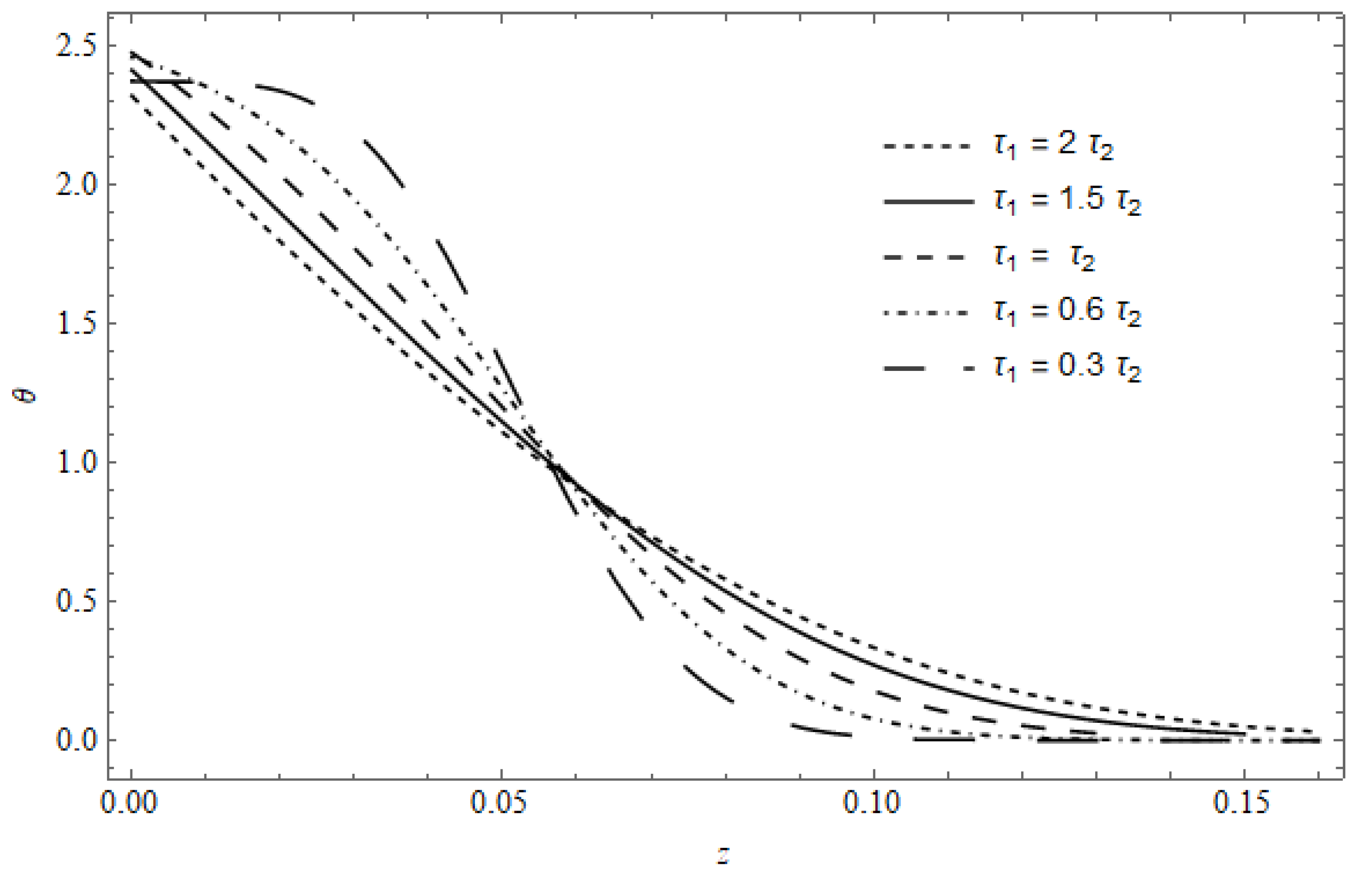
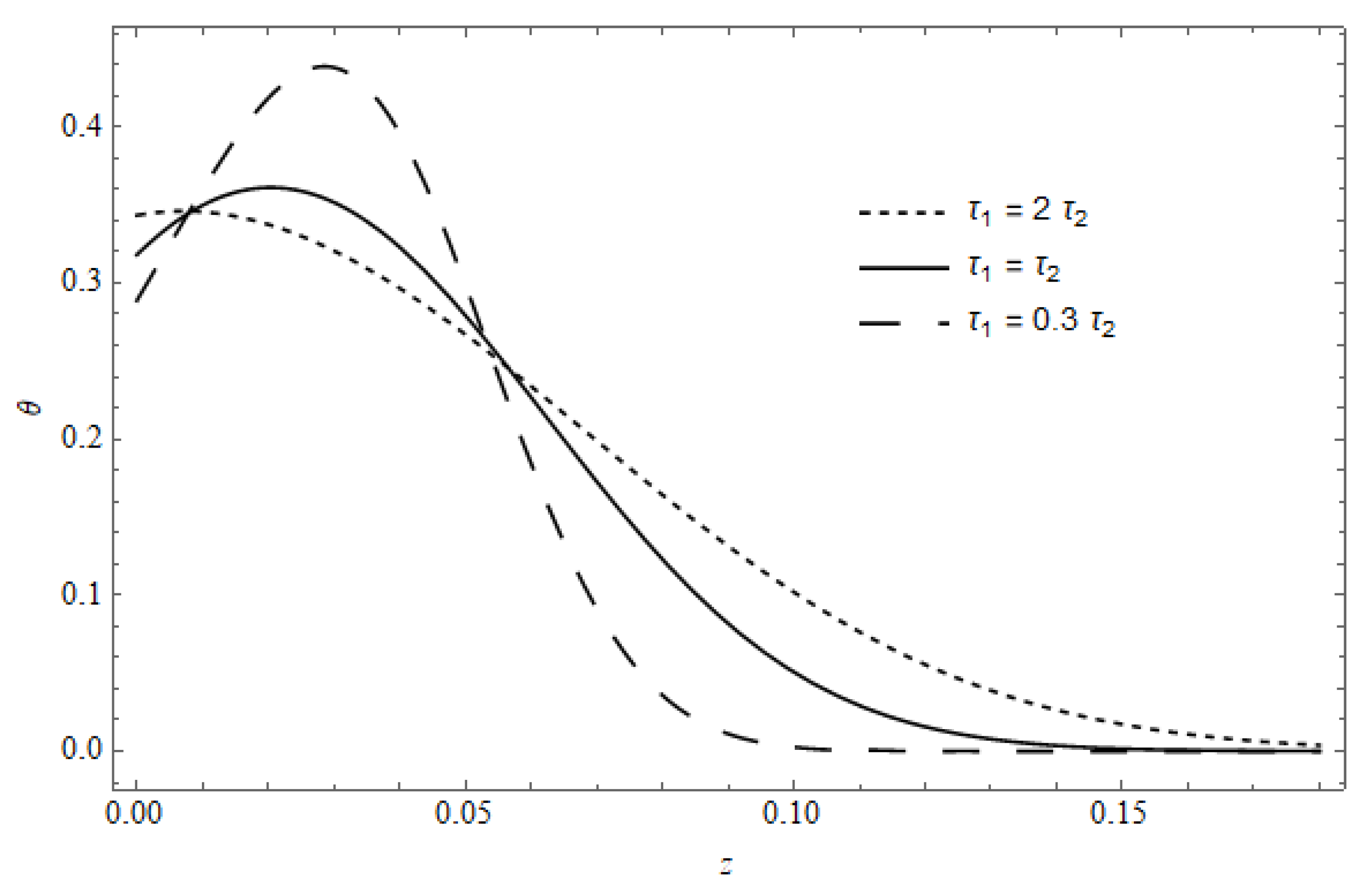
Figure 8 represents the temperature versus
z in the absence of cooling, with
as a parameter, calculated for
and
. The figure shows that, near the surface, the temperature gradients in the case of
are stronger than that of
, which has lower gradients; this behavior is evident for the curve of
. Additionally, the penetration of temperature into the medium increases as
increases and becomes greater as
; this behavior is clearly shown for
, demonstrated by comparison with the other values of
. Again, the behavior of the temperature when
is similar to the behavior of the classical coupled theory of thermoelasticity in [
31].
Figure 9 represents the temperature distribution versus
z, with
as a parameter, calculated for
,
and
. The main behavior of the previous figure is observed here for both the gradient of the temperature and the penetration into the medium. The figure shows a pronounced contribution to the cooling, where for
it is clear that the maximum does not occur at the illuminated surface but is shifted to greater
values and the temperature at the surface decreases as
decreases.
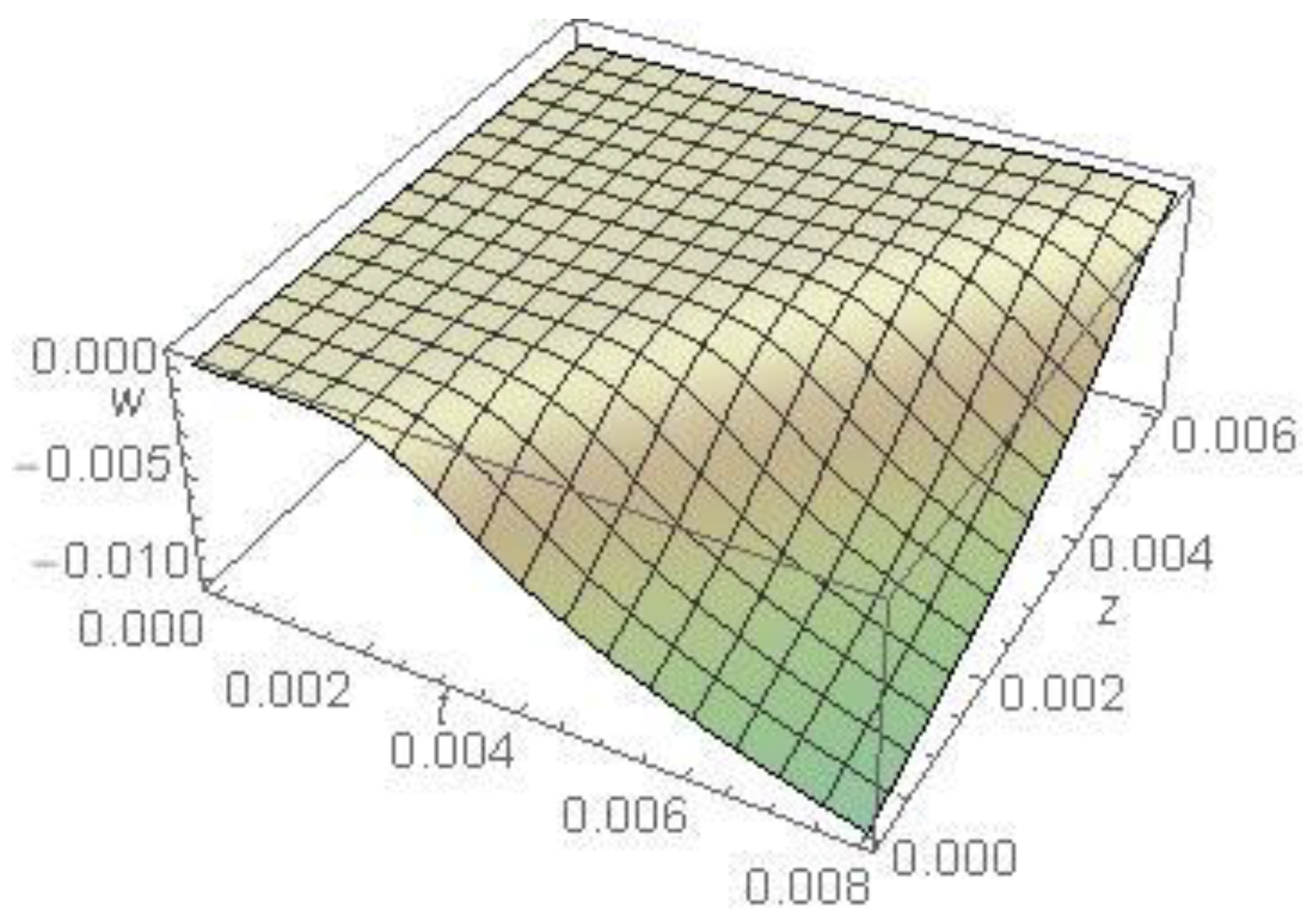
Figure 10 represents the component of the displacement
of the medium as a function of
and
in the absence of cooling, calculated for
and
The negative sign of the displacement refers to its direction, where it occurs in the direction of the free surface. As seen, the displacement does not show a behavior before the time
; this behavior is attributed to the small temperature at this time; moreover, the displacement increases with increased time. The maximum displacement appears at the surface and decreases as
takes greater values until it vanishes; this behavior is due to temperature behavior.
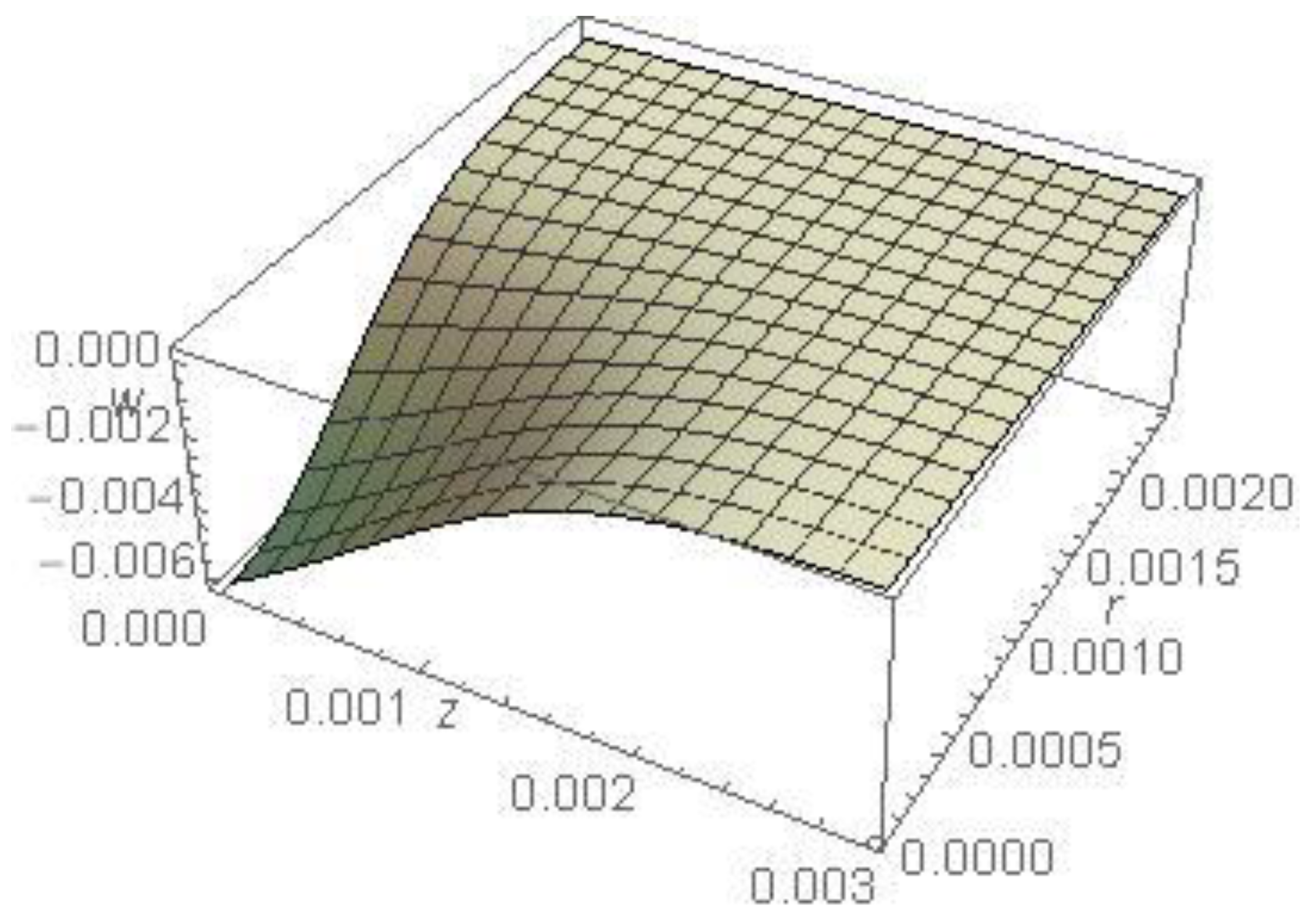
Figure 11 represents the component of the displacement
of the medium as a function of
and
in the absence of cooling, calculated for
and
This figure agrees with the previous figure, where the maximum displacement is observed at the surface and decreases by increasing both
and
. The figure also shows a negative sign for the displacement in the
r-direction; this behavior is due to a decrease in the distance between the particles in the
r-direction.
Figure 12 represents the distribution of the displacement
, with
as a parameter, calculated for
and
. As seen from the figure, the displacement decreases with an increase in
; this behavior is owed to the decrease in the corresponding temperature (see
Figure 7).
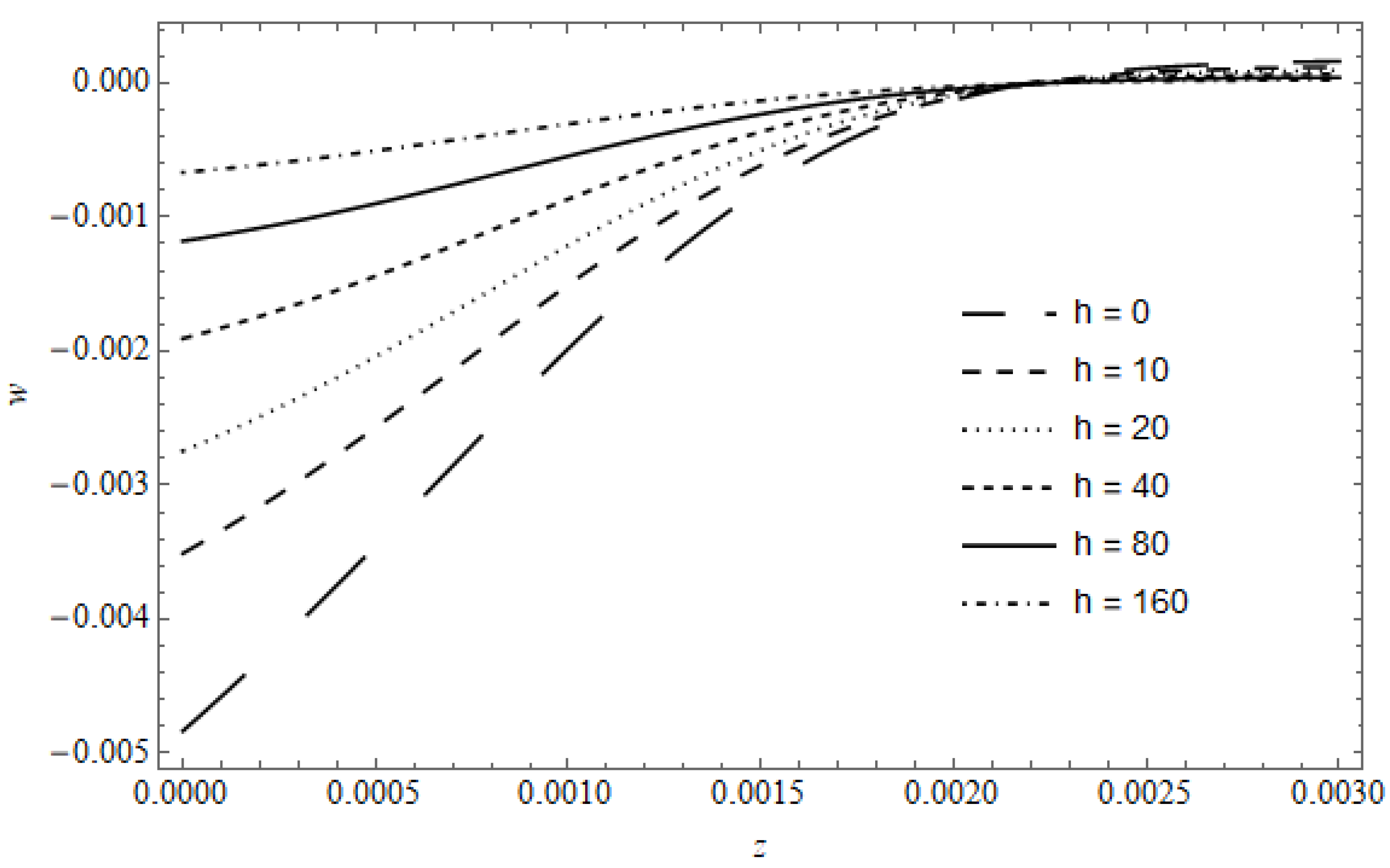
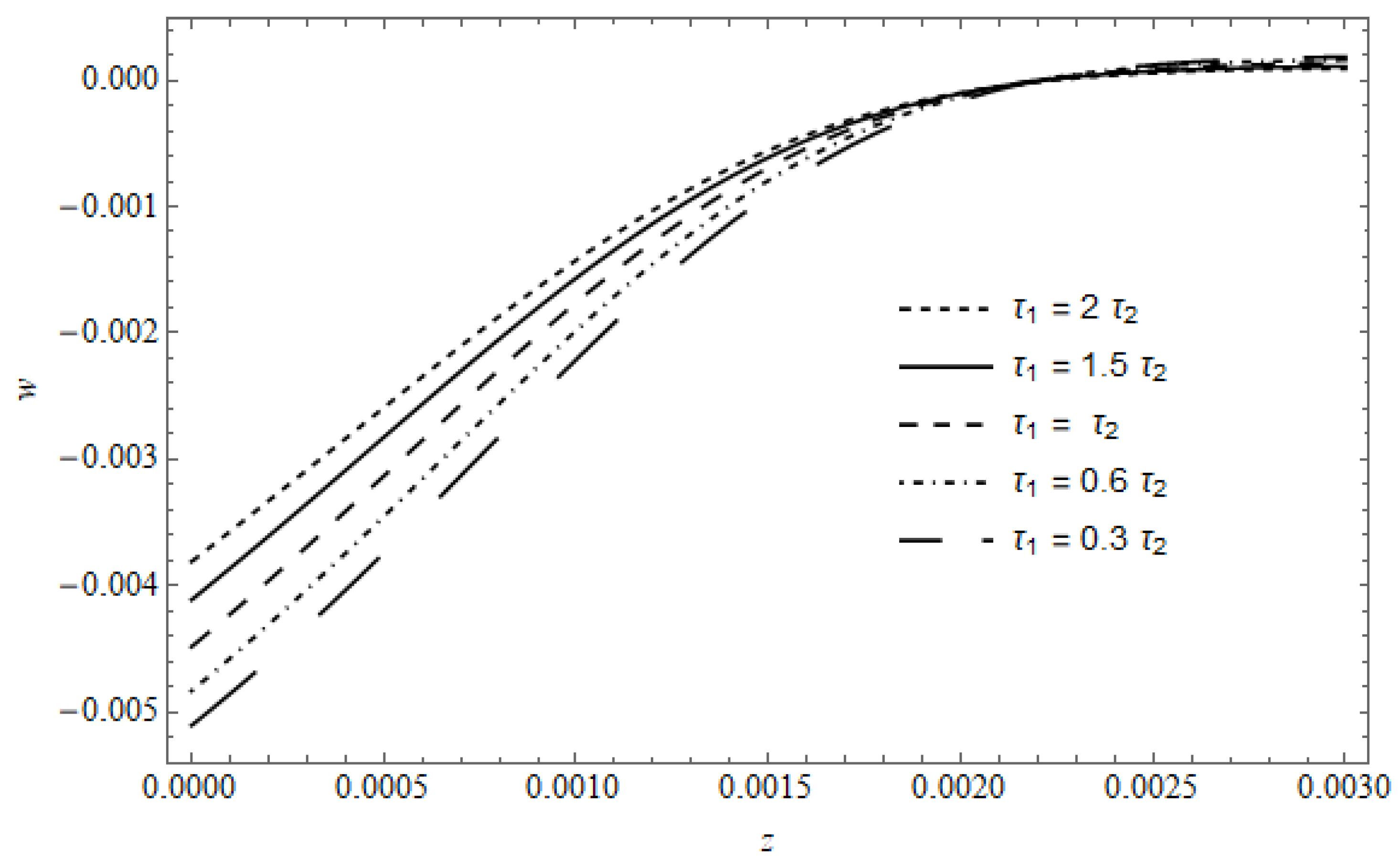
Figure 13 represents the displacement
in the absence of cooling, with
as a parameter, calculated for
and
. The figure shows that as
takes values greater than
, the displacement decreases, and vice versa. Observing the behaviors of both the temperature and the displacement, one can note that the smallest and deeper temperatures produce the smallest displacements; this conduct can be explained from
Figure 8, where for
, the gradient of the temperature in the vicinity of the surface and the penetration into the medium is greater than in the case of
; this means that the first case consumes more energy in heating the surrounding and to penetrate than the second case and, thus, its temperature and displacement is the smallest.
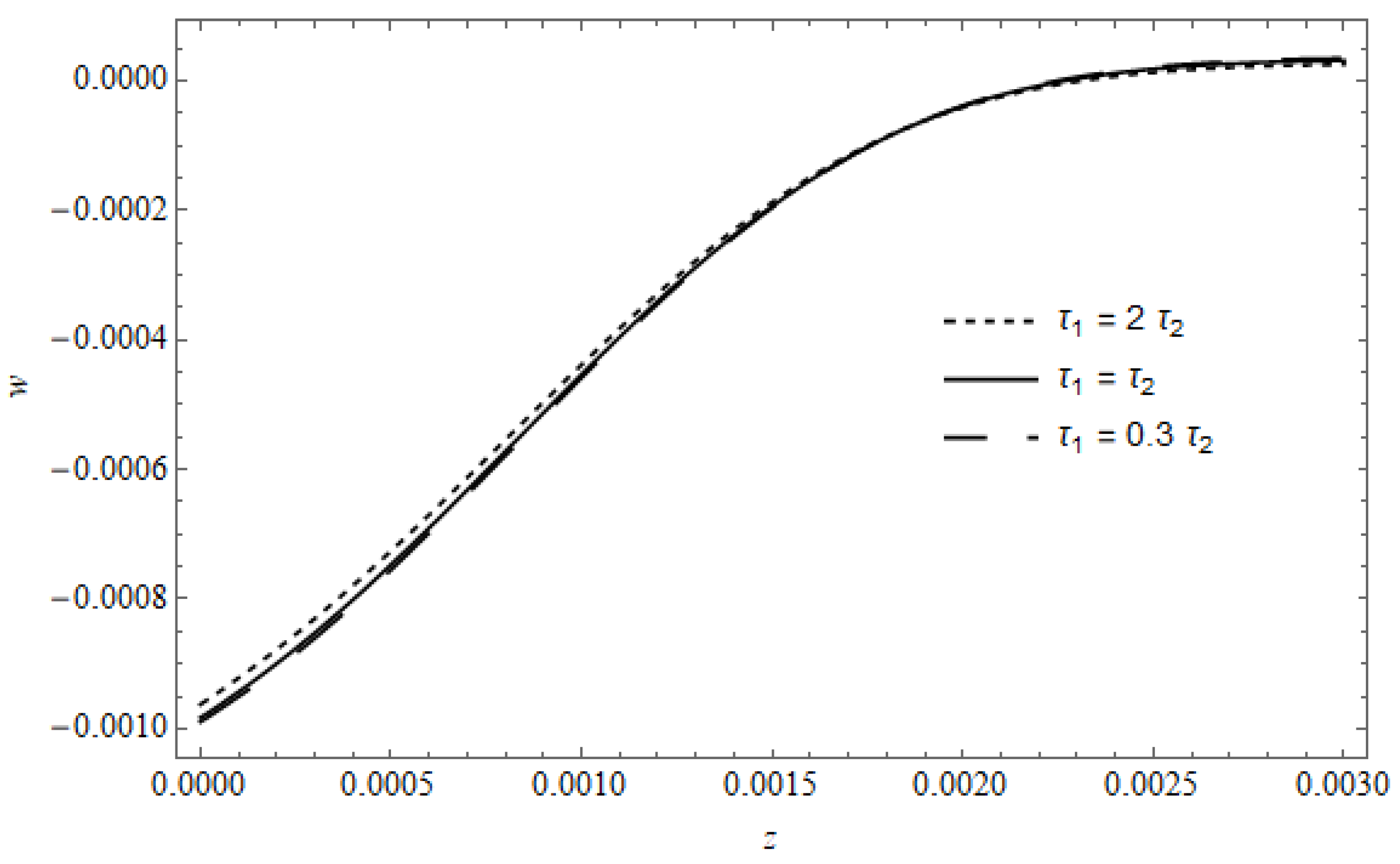
Figure 14 represents the displacement
with the existence of cooling, with
as a parameter, calculated for
and
. The figure shows a clear influence for the heat losses, where the difference between the three curves becomes approximately slight; this is despite the compatibility of the behavior of this figure with the previous figure.
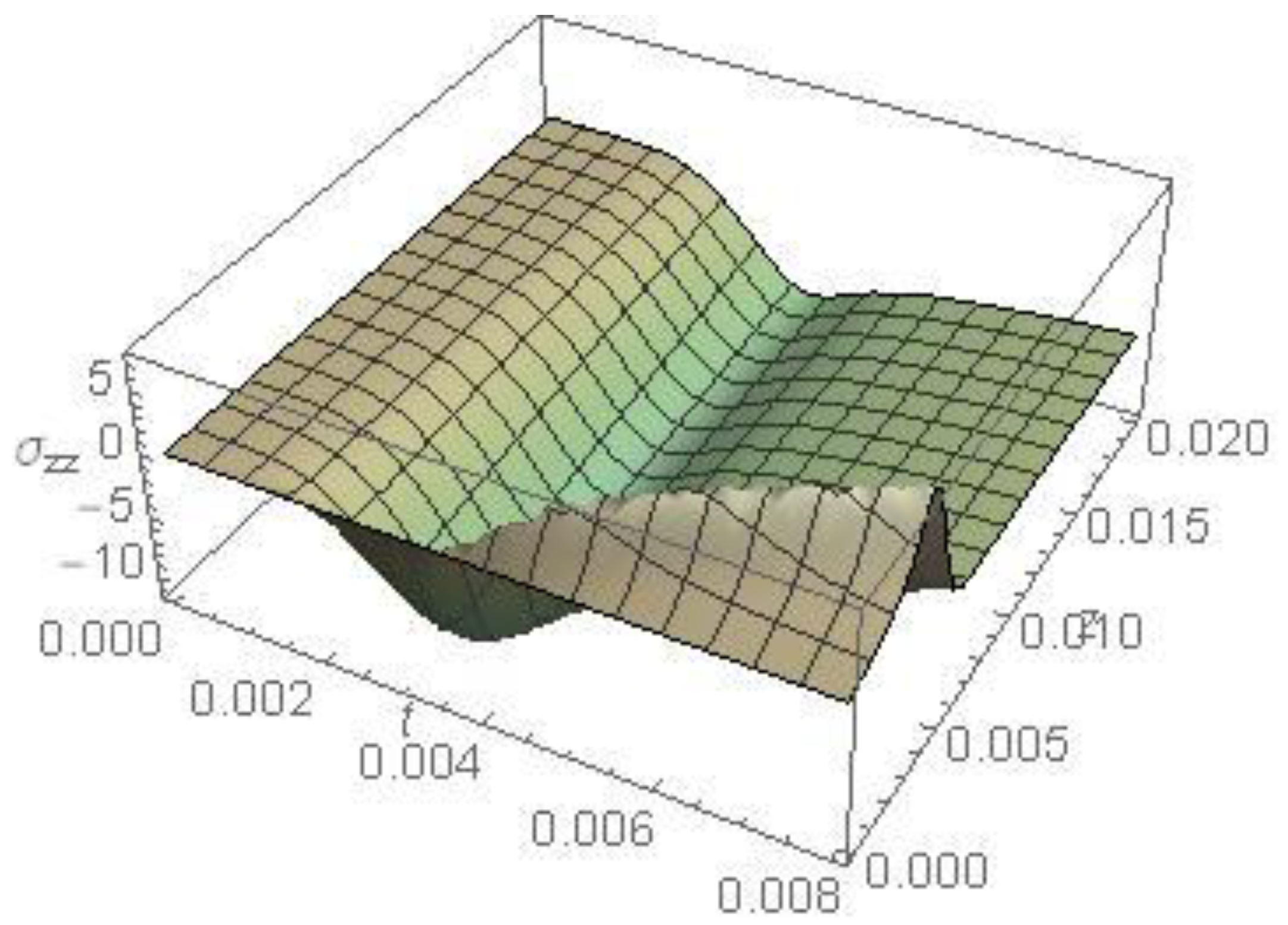
Figure 15 represents the stress component
as a function of
and
in the absence of cooling, calculated for
and
. The general behavior of
depends on the behavior of both the gradient of the displacement and the temperature (see equation 7); hence, as seen, before the laser pulse reaches its peak, the temperature and the displacement increase, but the temperature has the superiority; this explains the negative values of
. After the laser pulse reaches its peak, the absorbed energy decreases, and then the temperature decreases while the displacement and its gradient are still increasing; this explains the positive values of
near the surface. One can observe that this behavior is clear after the temperature reaches its maximum. By increasing z-values, the influence of the gradient of the displacement begins to decay to permit the temperature to gain the upper hand again; this gives
negative values until the stress vanishes.
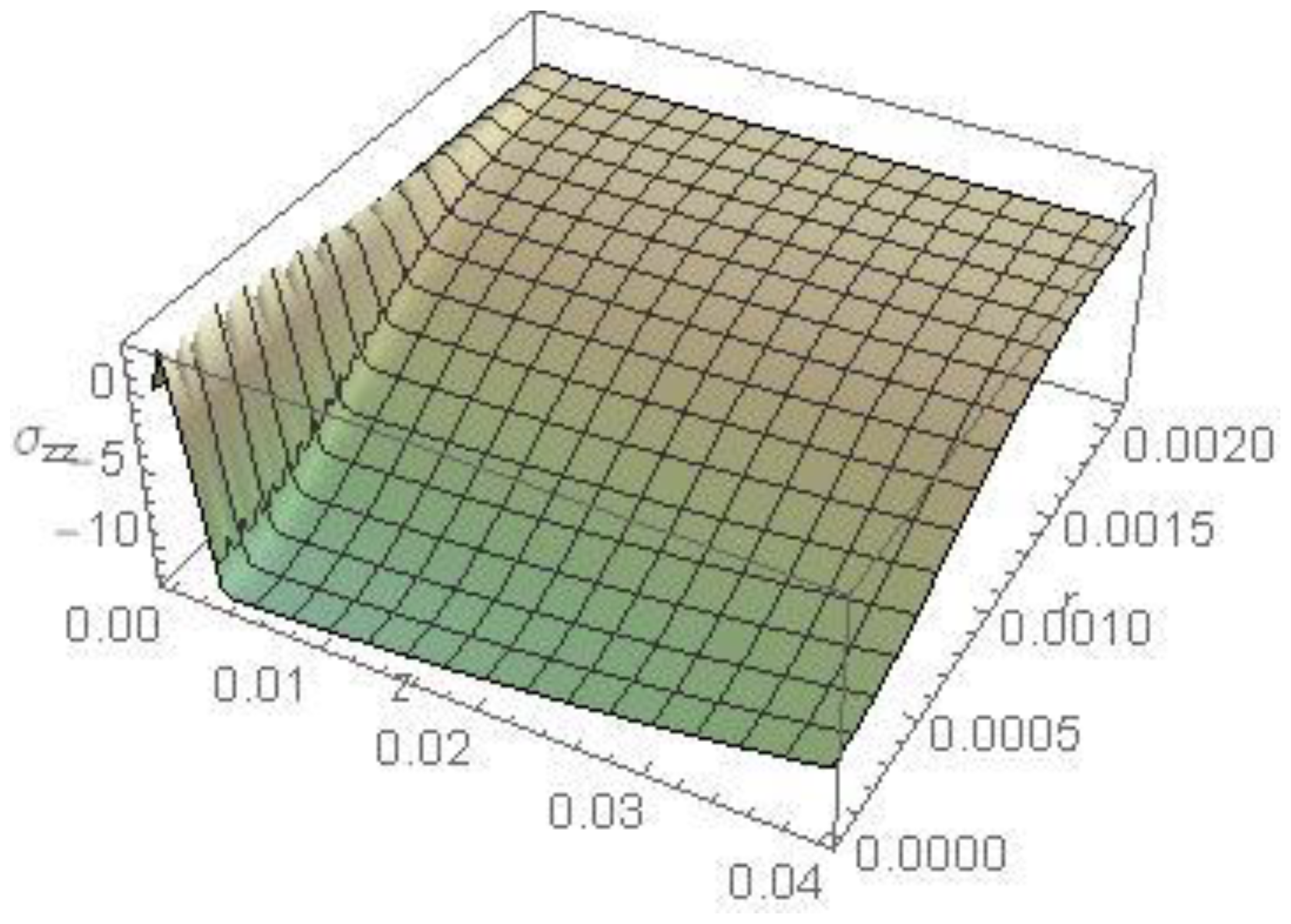
Figure 16 represents the stress component
as a function of
and
in the absence of cooling, calculated for
and
. It is clear that the stress
at the surface satisfies the boundary condition for all values of
r. Near the surface,
begins to increase until it reaches a maximum value, then it decreases with increasing
until the stress vanishes (this will be seen in a later figure). The figure also shows that except at the surface
, the stress begins with a maximum value in the
r-direction, then decreases until it vanishes.
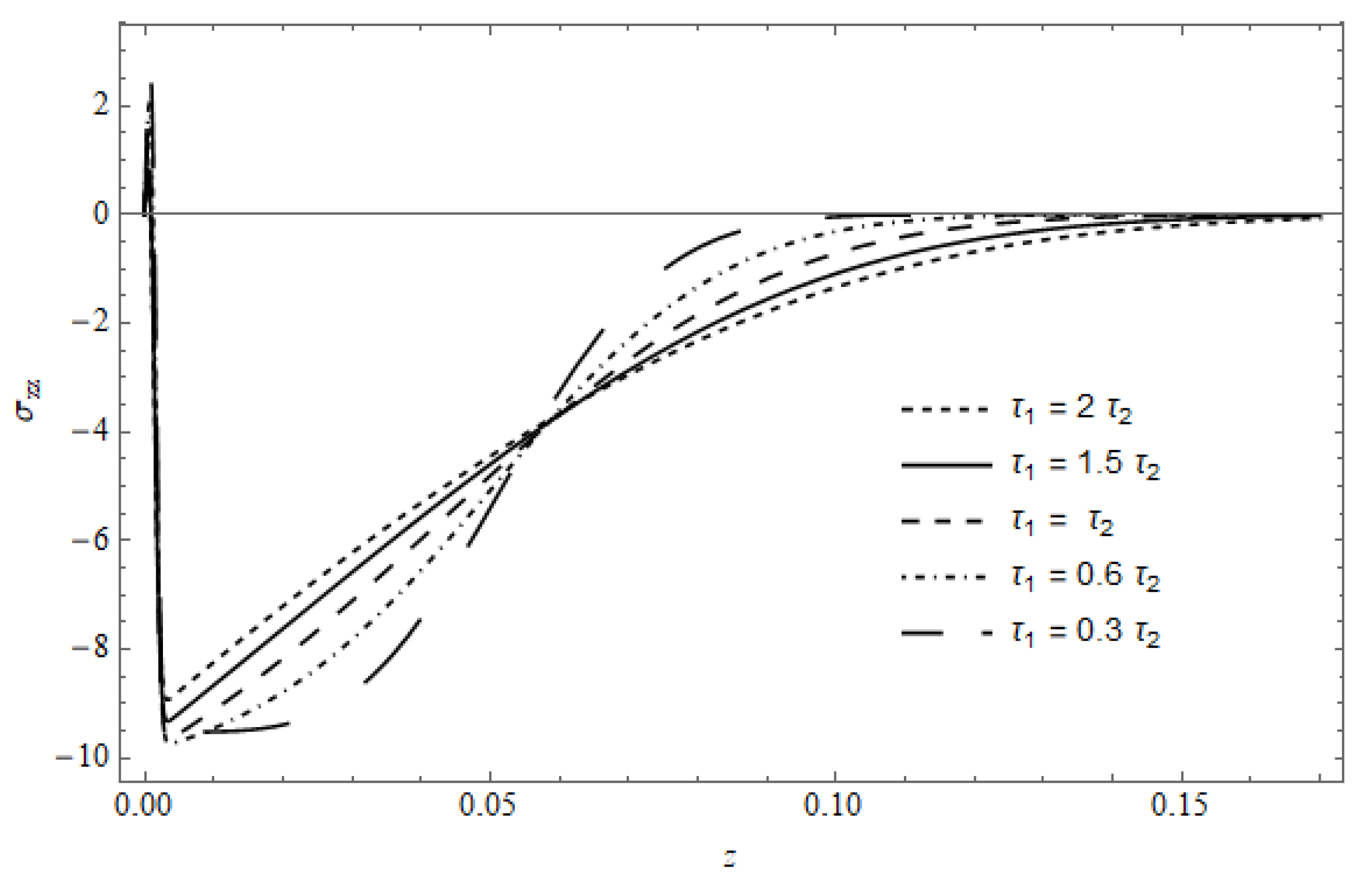
Figure 17 represents the stress component
versus
z, with
as a parameter, calculated for
and
. As seen for different
values, the stresses in the vicinity of the surface are almost identical in their gradients. As
z increases, the performance of the temperature with cooling appears evident, as in
Figure 7.
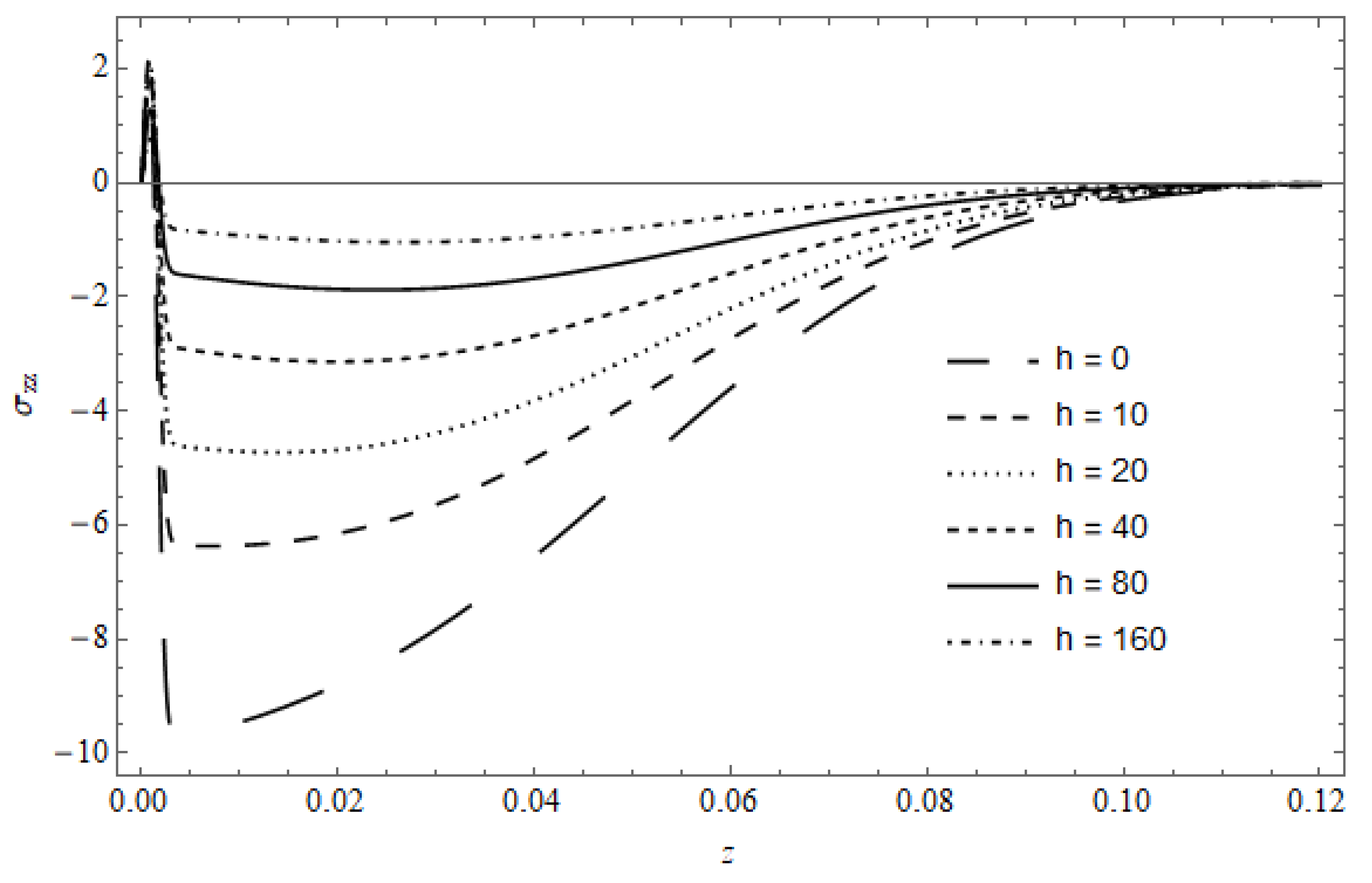
Figure 18 represents the stress component
versus
z in the absence of cooling, with
as a parameter, calculated for
and
. The figure shows that the stress in the vicinity of the surface is slightly affected by
; as
z increases, a pronounced effect for
is observed, where the behavior of the temperature appears with
(see
Figure 8).
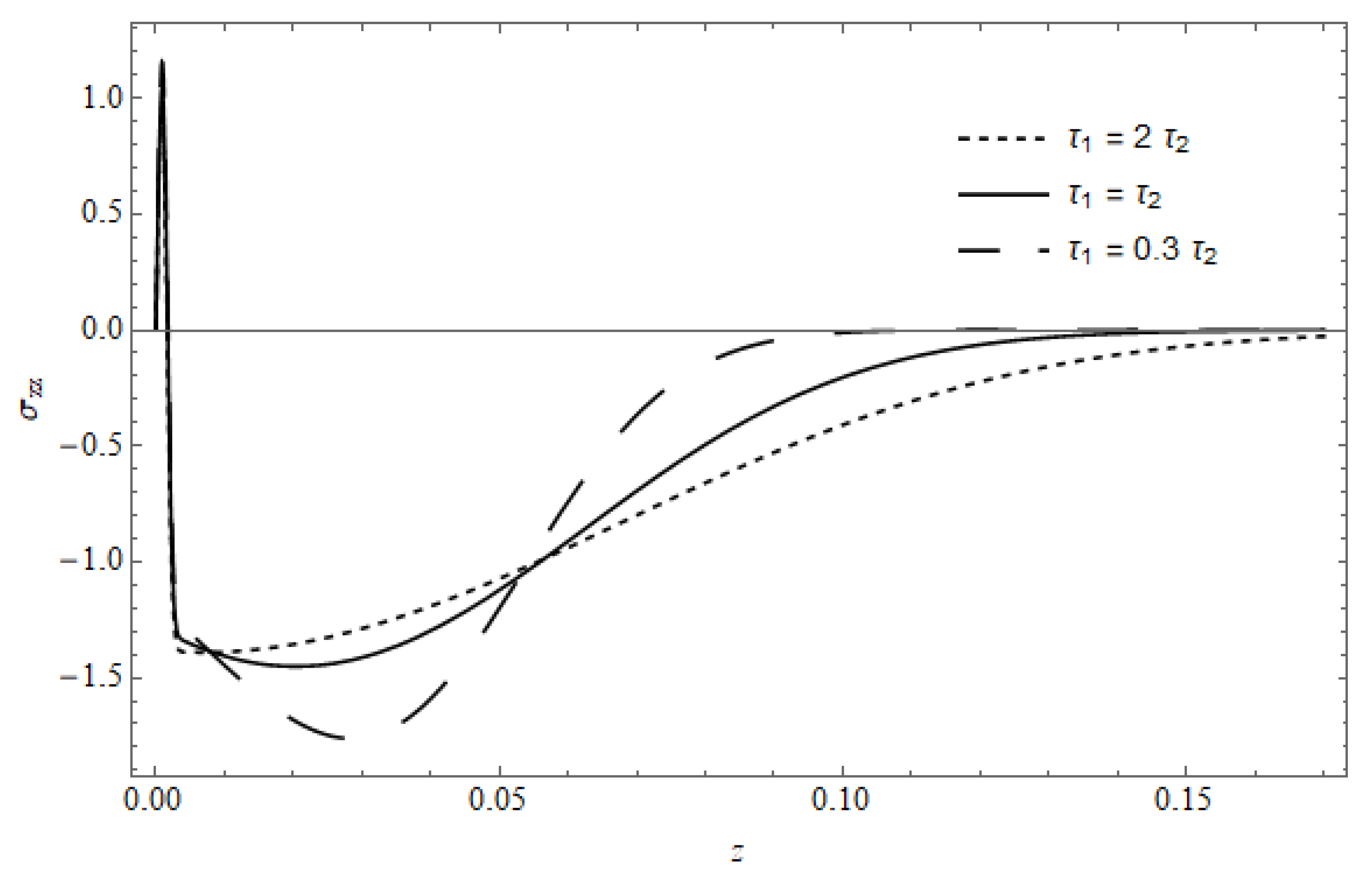
Figure 19 represents the stress component
versus
z, with
as a parameter in the existence of cooling, calculated for
and
. As seen, the behavior of
at the surface coincides for the three curves; as
z increases, the effect of the temperature is clear (see
Figure 9).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


















