Generalized 5-Point Approximating Subdivision Scheme of Varying Arity


 ,
,  ,
, 
Abstract
:1. Introduction
2. Preliminaries
3. The 5-Point Approximating Schemes
3.1. 5-Point Binary Approximating Scheme
3.1.1. Convergence Criteria
3.1.2. Continuity
3.1.3. Hölder Regularity
3.1.4. Limit Stencils
3.2. The 5-Point Ternary Approximating Scheme
3.2.1. Continuity
3.2.2. Hölder’s Regularity
3.2.3. Limit Stencils
3.3. The 5-Point Quaternary Approximating Scheme
3.3.1. Continuity
3.3.2. Hölder’s Regularity
3.3.3. Limit Stencil
4. Results and Discussion
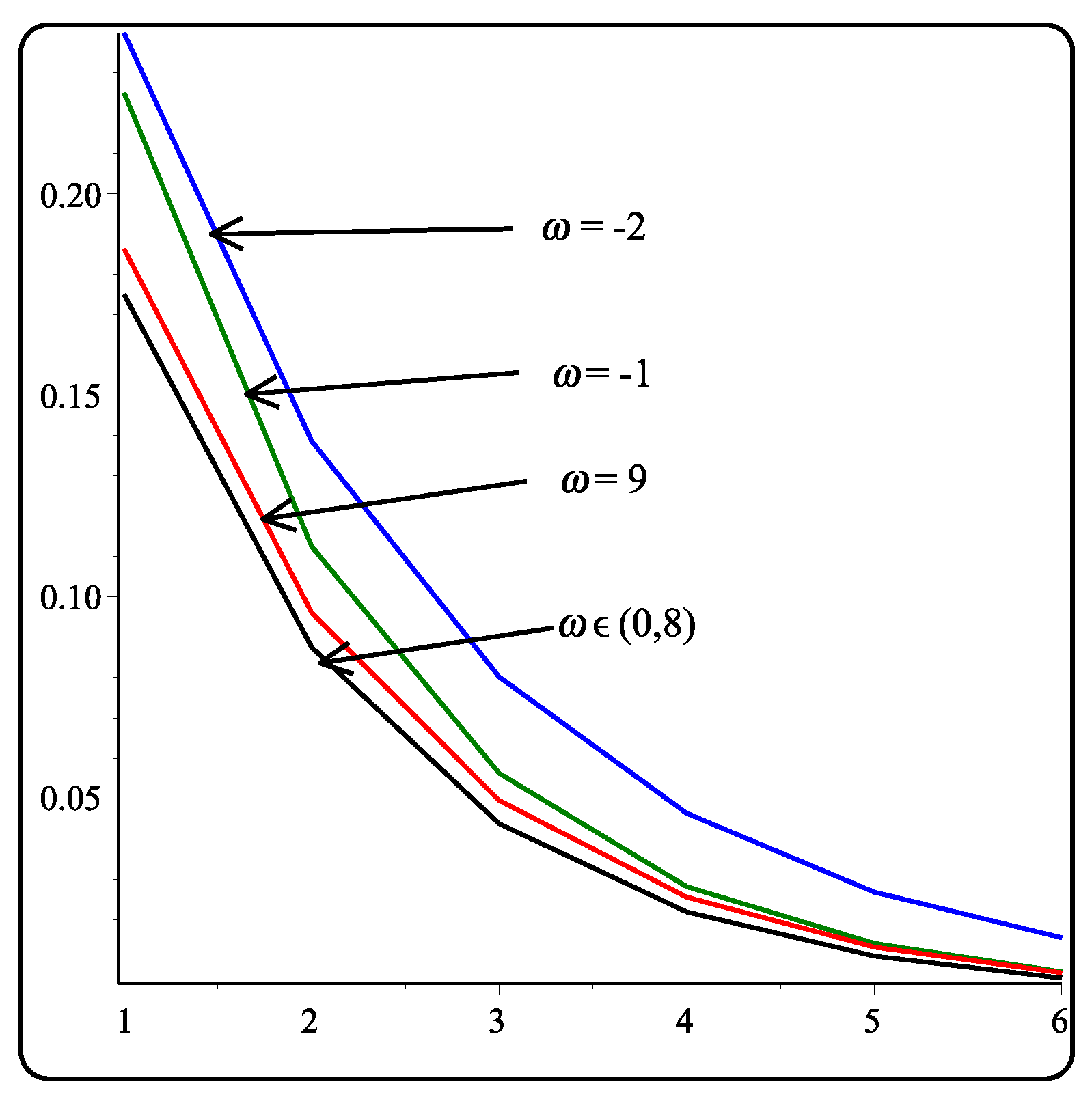
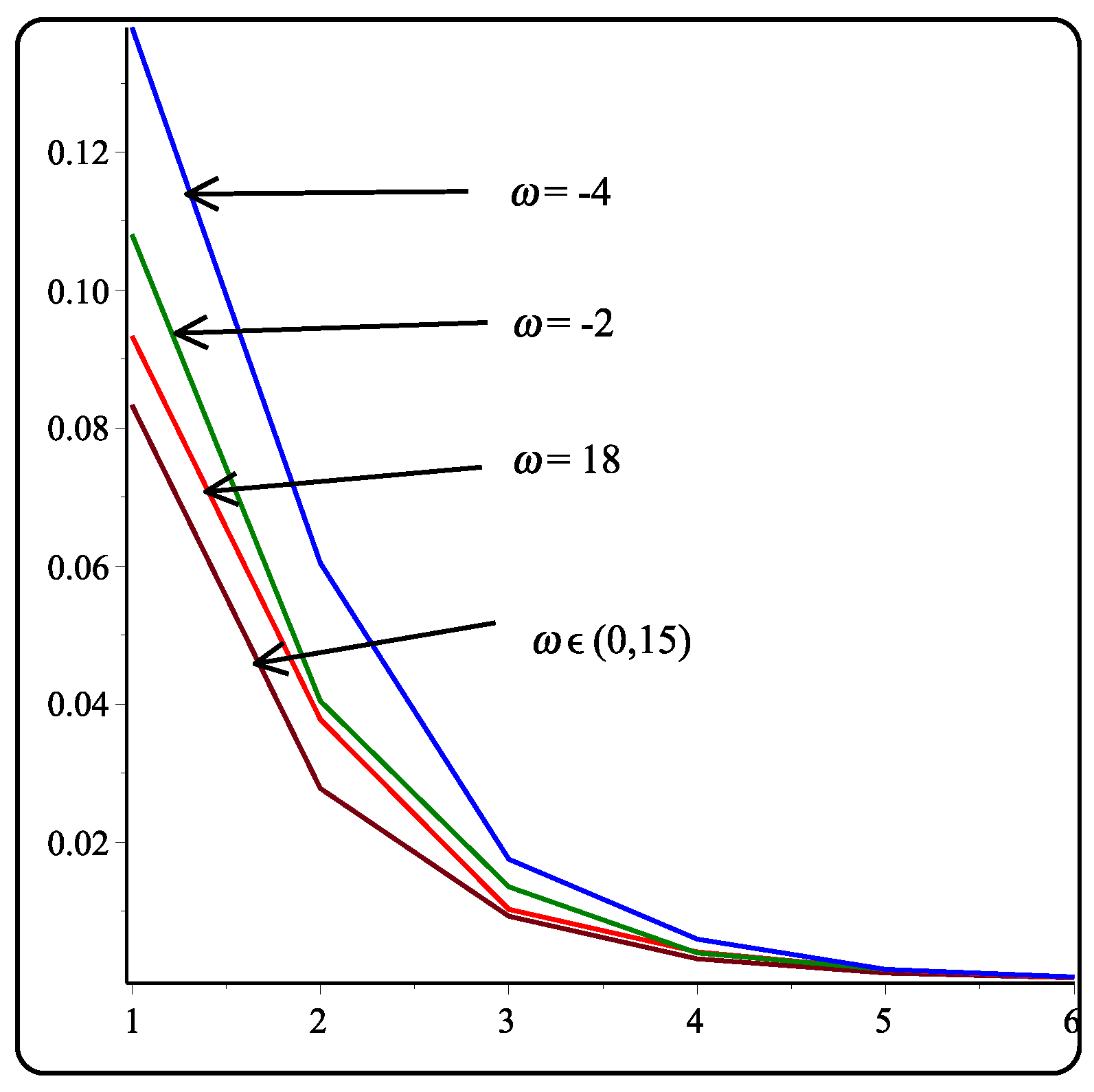
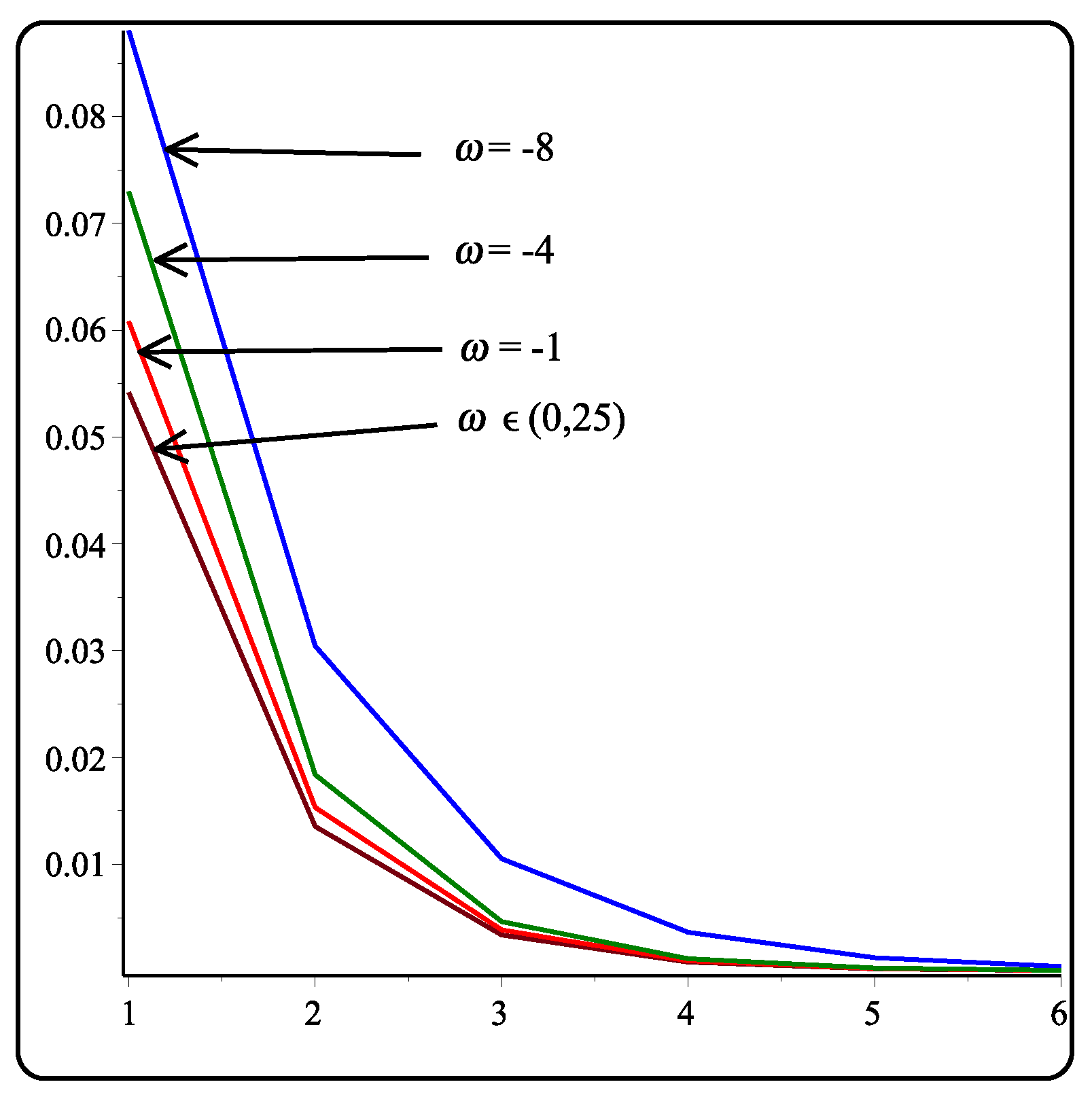
4.1. Error Bound
4.2. Continuity
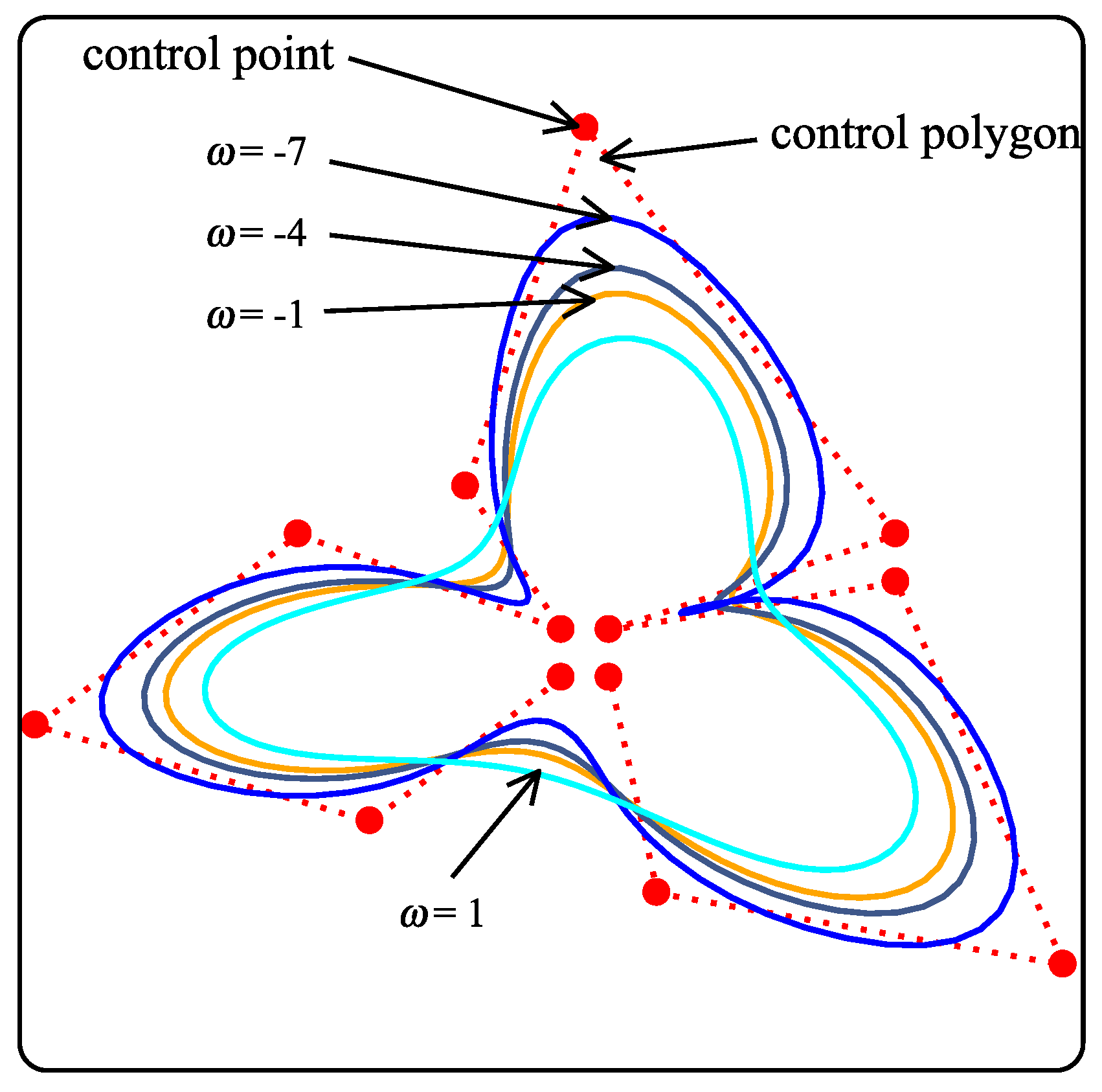
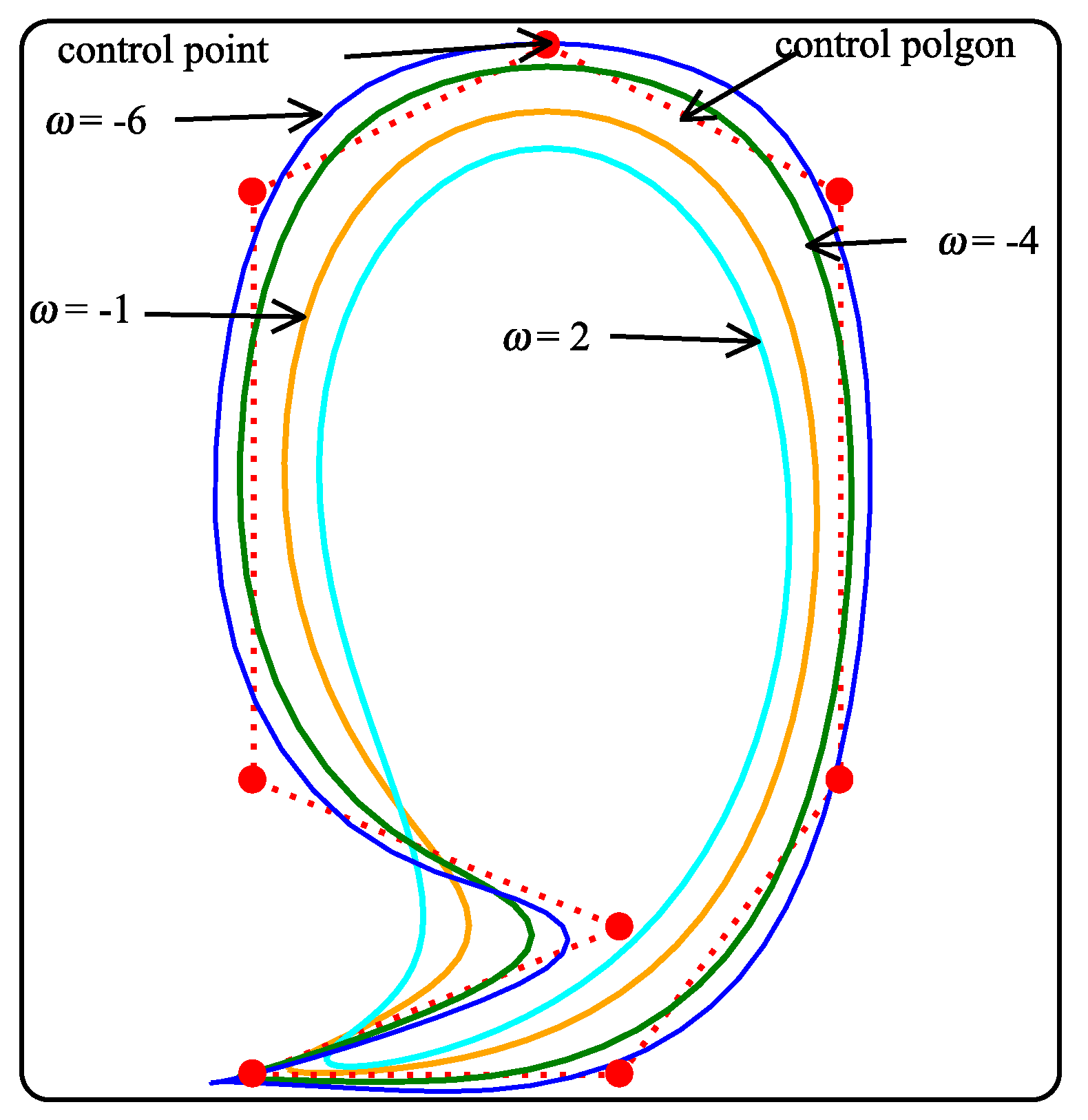
4.3. Shapes of Limit Curves
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- De Rham, G. Un peu de mathématiques à propos d’une courbe plane. Elem. Math. 1947, 2, 73–76. [Google Scholar]
- Chaikin, G.M. An algorithm for high-speed curve generation. Comput. Gr. Imag. Process. 1974, 3, 346–349. [Google Scholar] [CrossRef]
- Doo, D.; Sabin, M. Behaviour of recursive division surfaces near extraordinary points. Comput. Aided Des. 1978, 10, 356–360. [Google Scholar] [CrossRef]
- Catmull, E.; Clark, J. Recursively generated B-spline surfaces on arbitrary topological meshes. Comput. Aided Des. 1978, 10, 350–355. [Google Scholar] [CrossRef]
- Deslauriers, G.; Dubuc, S. Symmetric iterative interpolation processes. In Constructive Approximation; DeVore, R.A., Saff, E.B., Eds.; Springer: Boston, MA, USA, 1989; pp. 49–68. [Google Scholar]
- Dyn, N.; Levine, D.; Gregory, J.A. A butterfly subdivision scheme for surface interpolation with tension control. ACM Trans. Gr. 1990, 9, 160–169. [Google Scholar] [CrossRef]
- Cai, Z. Convergence, error estimation and some properties of four-point interpolation subdivision scheme. Comput. Aided Geom. Des. 1995, 12, 459–468. [Google Scholar]
- Hassan, M.F.; Ivrissimitzis, I.P.; Dodgson, N.A.; Sabin, M.A. An interpolating 4-point C2 ternary stationary subdivision scheme. Comput. Aided Geom. Des. 2002, 19, 1–18. [Google Scholar] [CrossRef]
- Hassan, M.; Dodgson, N.A. Ternary and Three-point Univariate Subdivision Schemes; No. UCAM-CL-TR-520; Cambridge Computer Laboratory: Cambridge, UK, September 2001. [Google Scholar]
- Mustafa, G.; Liu, X. A subdivision scheme for volumetric models. Appl. Math. J. Chin. Univ. 2005, 20, 213–224. [Google Scholar] [CrossRef]
- Siddiqi, S.S.; Ahmad, N. A C6 approximating subdivision scheme. Appl. Math. Lett. 2008, 21, 722–728. [Google Scholar] [CrossRef] [Green Version]
- Hormann, K.; Sabin, M.A. A family of subdivision schemes with cubic precision. Comput. Aided Geom. Des. 2008, 25, 41–52. [Google Scholar] [CrossRef]
- Faheem, K.; Mustafa, G. Ternary six-point interpolating subdivision scheme. Lobachevskii J. Math. 2008, 29, 153–163. [Google Scholar] [CrossRef]
- Mustafa, G.; Khan, F. A new 4-point quaternary approximating subdivision scheme. Abstr. Appl. Anal. 2009, 2009. [Google Scholar] [CrossRef]
- Mustafa, G.; Khan, F.; Ghaffar, A. The m-point approximating subdivision scheme. Lobachevskii J. Math. 2009, 30, 138–145. [Google Scholar] [CrossRef]
- Siddiqi, S.S.; Rehan, K. Modified form of binary and ternary 3-point subdivision schemes. Appl. Math. Comput. 2010, 216, 970–982. [Google Scholar] [CrossRef]
- Mustafa, G.; Ghaffar, A.; Khan, F. The odd-point ternary approximating schemes. Am. J. Comput. Math. 2011, 1, 111–118. [Google Scholar] [CrossRef] [Green Version]
- Ghaffar, A.; Mustafa, G.; Qin, K. Unification and application of 3-point approximating subdivision schemes of varying arity. Open J. Appl. Sci. 2012, 2, 48–52. [Google Scholar] [CrossRef]
- Ghaffar, A.; Mustafa, G.; Qin, K. The 4-point 3-ary approximating subdivision scheme. Open J. Appl. Sci. 2013, 3, 106–111. [Google Scholar] [CrossRef]
- Mustafa, G.; Ghaffar, A.; Aslam, M. A subdivision-regularization framework for preventing over fitting of data by a model. AAM 2013, 8, 178–190. [Google Scholar]
- Mustafa, G.; Ashraf, P.; Deng, J. Generalized and unified families of interpolating subdivision schemes. Numer. Math. Theory Method. Appl. 2014, 7, 193–213. [Google Scholar] [CrossRef]
- Siddiqi, S.S.; Younis, M. The Quaternary Interpolating Scheme for Geometric Design. Int. Sch. Res. Not. 2013, 2013. [Google Scholar] [CrossRef]
- Rehan, K.; Siddiqi, S.S. A Family of Ternary Subdivision Schemes for Curves. Appl. Math. Comput. 2015, 270, 114–123. [Google Scholar] [CrossRef]
- Rehan, K.; Sabri, M.A. A combined ternary 4-point subdivision scheme. Appl. Math. Comput. 2016, 276, 278–283. [Google Scholar] [CrossRef]
- Ashraf, P.; Sabir, M.; Ghaffar, A.; Nisar, K.S.; Khan, I. Shape-Preservation of Ternary Four-point Interpolating Non-stationary Subdivision Scheme. Front. Phys. 2020, 7. [Google Scholar] [CrossRef]
- Ghaffar, A.; Ullah, Z.; Bari, M.; Nisar, K.S.; Al-Qurashi, M.M.; Baleanu, D. A new class of 2m-point binary non-stationary subdivision schemes. Adv. Differ. Equ. 2019, 2019, 325. [Google Scholar] [CrossRef]
- Ghaffar, A.; Ullah, Z.; Bari, M.; Nisar, K.S.; Baleanu, D. Family of odd point non-stationary subdivision schemes and their applications. Adv. Differ. Equ. 2019, 2019, 1–20. [Google Scholar] [CrossRef]
- Ghaffar, A.; Bari, M.; Ullah, Z.; Iqbal, M.; Nisar, K.S.; Baleanu, D. A New Class of 2q-Point Nonstationary Subdivision Schemes and Their Applications. Mathematics 2019, 7, 639. [Google Scholar] [CrossRef] [Green Version]
- Ghaffar, A.; Iqbal, M.; Bari, M.; Muhammad Hussain, S.; Manzoor, R.; Sooppy Nisar, K.; Baleanu, D. Construction and Application of Nine-Tic B-Spline Tensor Product SS. Mathematics 2019, 7, 675. [Google Scholar] [CrossRef] [Green Version]
- Dyn, N.; Iske, A.; Quak, E.; Floater, M.S. Tutorials on Multiresolution in Geometric Modelling, Summer School Lecture Notes Series: Mathematics and Visualization; Springer Science & Business Media: Berlin, Germany, 2002. [Google Scholar]
- Mustafa, G.; Hashmi, M.S. Subdivision depth computation for n-ary subdivision curves/surfaces. Vis. Comput. 2010, 26, 841–851. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 0.175000 | 0.087500 | 0.043750 | 0.021875 | 0.010938 | 0.005469 | |
| 0.239815 | 0.138643 | 0.080153 | 0.046338 | 0.026789 | 0.015488 | |
| 0.186290 | 0.096056 | 0.049529 | 0.025538 | 0.013168 | 0.006790 | |
| 0.225000 | 0.1125000 | 0.056250 | 0.0281500 | 0.0140750 | 0.00703850 |
| k | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 0.083333 | 0.027778 | 0.009259 | 0.003086 | 0.001029 | 0.000343 | |
| 0.088050 | 0.030437 | 0.010521 | 0.003637 | 0.001257 | 0.000435 | |
| 0.084496 | 0.028426 | 0.009563 | 0.003217 | 0.001082 | 0.000364 | |
| 0.085670 | 0.029085 | 0.009875 | 0.003353 | 0.001138 | 0.000386 |
| k | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 0.054167 | 0.013542 | 0.003385 | 0.000846 | 0.000212 | 0.000053 | |
| 0.088050 | 0.030437 | 0.010521 | 0.003637 | 0.001257 | 0.000435 | |
| 0.054449 | 0.013665 | 0.003430 | 0.000861 | 0.000216 | 0.000054 | |
| 0.054732 | 0.013790 | 0.003474 | 0.000875 | 0.000221 | 0.000056 |
| Scheme | Parameter | Continuity | Scheme | Parameter | Continuity |
|---|---|---|---|---|---|
| Binary | Binary | ||||
| Binary | Binary | ||||
| Binary | Binary | ||||
| Binary | Binary |
| Scheme | Parameter | Continuity |
|---|---|---|
| Ternary | ||
| Ternary | ||
| Ternary | ||
| Ternary | ||
| Ternary | ||
| Ternary |
| Scheme | Parameter | Continuity |
|---|---|---|
| Quaternary | ||
| Quaternary | ||
| Quaternary | ||
| Quaternary | ||
| Quaternary | ||
| Quaternary |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussain, S.M.; Rehman, A.U.; Baleanu, D.; Nisar, K.S.; Ghaffar, A.; Abdul Karim, S.A. Generalized 5-Point Approximating Subdivision Scheme of Varying Arity. Mathematics 2020, 8, 474. https://doi.org/10.3390/math8040474
Hussain SM, Rehman AU, Baleanu D, Nisar KS, Ghaffar A, Abdul Karim SA. Generalized 5-Point Approximating Subdivision Scheme of Varying Arity. Mathematics. 2020; 8(4):474. https://doi.org/10.3390/math8040474
Chicago/Turabian StyleHussain, Sardar Muhammad, Aziz Ur Rehman, Dumitru Baleanu, Kottakkaran Sooppy Nisar, Abdul Ghaffar, and Samsul Ariffin Abdul Karim. 2020. "Generalized 5-Point Approximating Subdivision Scheme of Varying Arity" Mathematics 8, no. 4: 474. https://doi.org/10.3390/math8040474
APA StyleHussain, S. M., Rehman, A. U., Baleanu, D., Nisar, K. S., Ghaffar, A., & Abdul Karim, S. A. (2020). Generalized 5-Point Approximating Subdivision Scheme of Varying Arity. Mathematics, 8(4), 474. https://doi.org/10.3390/math8040474