On the Effects of Circulation around a Circle on the Stability of a Thomson Vortex N-gon



Abstract
:1. Introduction
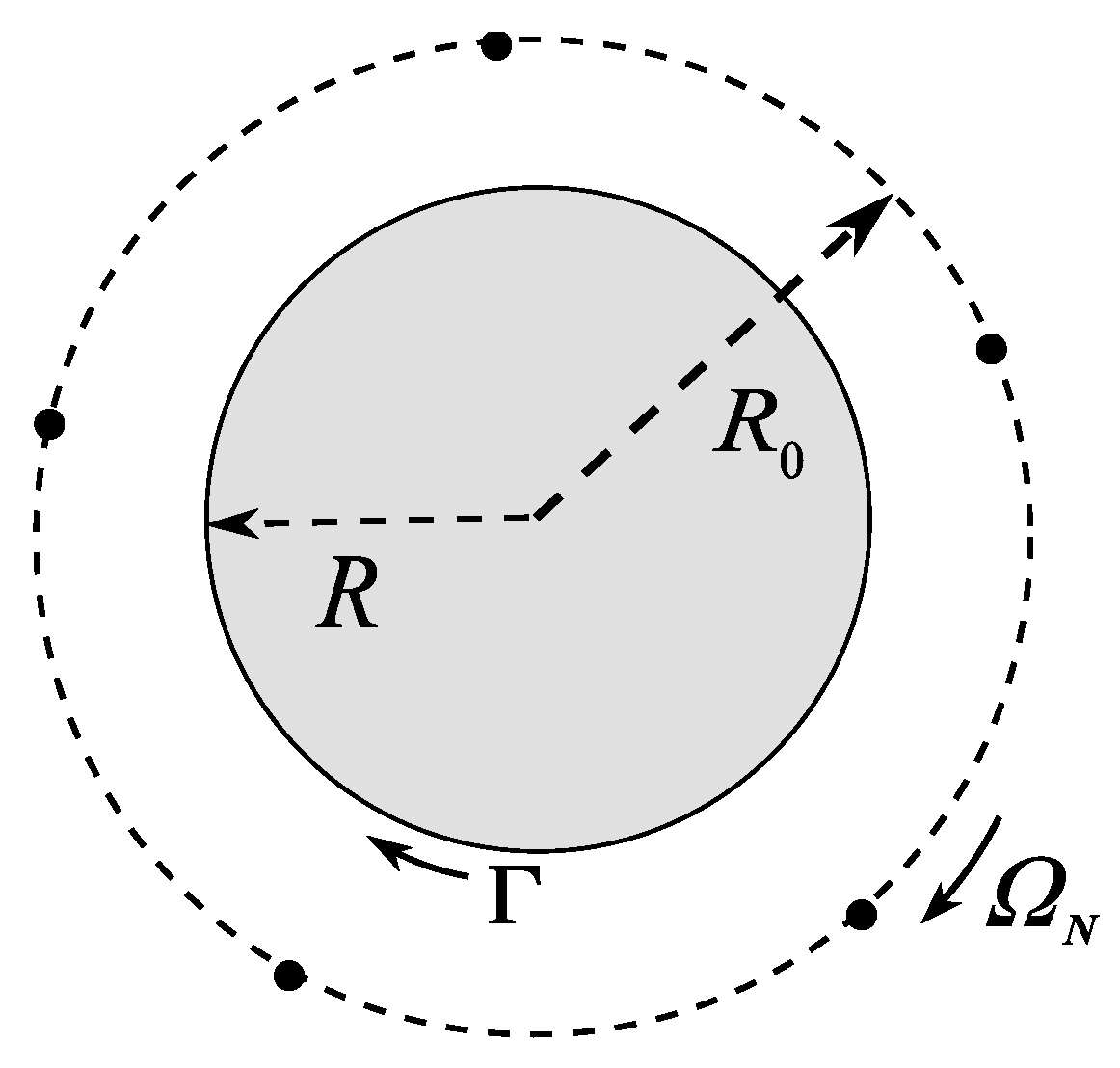
2. Problem Formulation
3. Stability of a Regular Vortex -gon for
4. Linear Analysis of Stability of the Vortex -gon in the Case of Arbitrary
4.1. The Perturbations Equation
4.2. Orbital Stability and Instability of Two-Dimension Invariant Set: General Definitions and Theorems
- 1°
- orbitally stable in an exact nonlinear setting if the inequalitiesare valid;
- 2°
- unstable if there is at least one value such that
- 3°
- If conditions and are not valid, then the solution (4) is stable in a linear setting, and nonlinear analysis is required to solve the stability problem.
4.3. Stability Diagram of a Regular Vortex N-gon
5. The Double-Zero Resonance in the Stability Problem of the Thomson Vortex Triangle
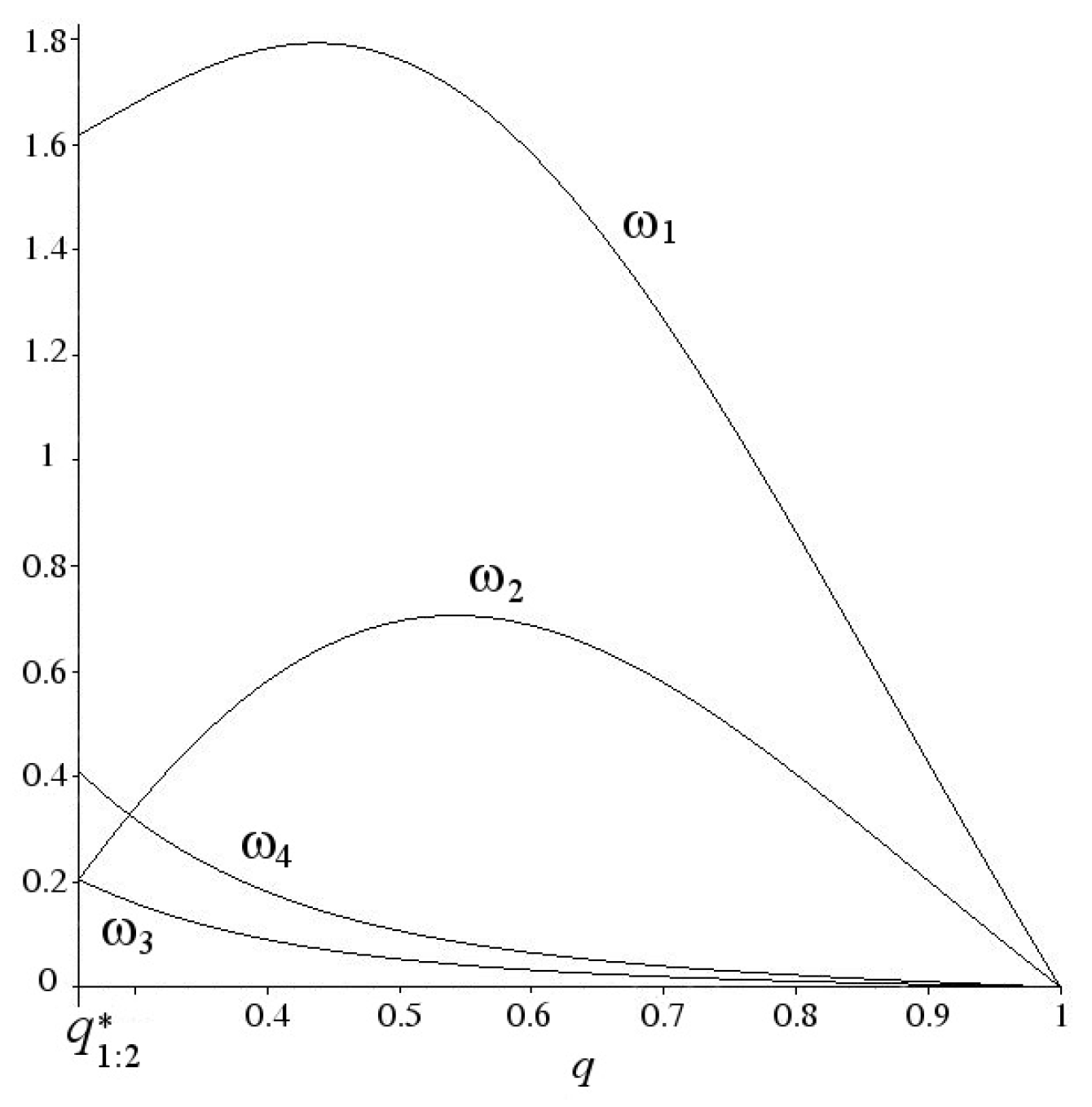
6. The Resonance 1:2 in the Stability Problem of the Thomson Vortex Pentagon
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Properties of Eigenvalues λ1k, λ2k and iλ0k of Matrices F1, F2 and G0
- The function is positive in the interval :
- The function does not have zeros in the interval :
- The function given by Formula (19) satisfies inequalityin the interval .
- In the case the value is positive:is defined by Formula (35).
- In the case of odd for any the inequalityis valid.
References
- Aref, H. Point vortex dynamics: A classical mathematics playground. J. Math. Phys. 2007, 48, 065401. [Google Scholar] [CrossRef] [Green Version]
- Aref, H.; Newton, P.K.; Stremler, M.A.; Tokieda, T.; Vainchtein, D.L. Vortex Crystals. Adv. Appl. Mech. 2003, 39, 1–79. [Google Scholar]
- Newton, P.K. The n-Vortex Problem: Analytical Techniques; Appl. Math. Sci.; Springer: New York, NY, USA, 2001; Volume 145. [Google Scholar]
- Borisov, A.V.; Mamaev, I.S. Mathematical Methods in the Dynamics of Vortex Structures; Institute of Computer Sciences: Moscow/Izhevsk, Russia, 2005. [Google Scholar]
- Kilin, A.A.; Borisov, A.V.; Mamaev, I.S. Dynamics of point vortices inside and outside of a circular domain. In Fundamental and Applied Problems in Vortex Theory; Institute of Computer Sciences: Moscow/Izhevsk, Russia, 2003; pp. 414–440. [Google Scholar]
- Saffman, P.G. Vortex Dynamics; Series Cambridge Monogr. Mech. and Appl. Math. Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Kozlov, V.V. General Theory of Vortices; Dynamical systems X., Encyclopaedia Math. Sci., 67; Springer: Berlin, Germany, 2003. [Google Scholar]
- Yarmchuk, E.; Gordon, M.; Packard, R. Observation of stationary vortex array in rotating superfluid helium. Phys. Rev. Lett. 1979, 43, 214–217. [Google Scholar] [CrossRef]
- Fine, K.; Cass, A.; Flynn, W.; Dryscoll, C. Relaxation of 2D Turbulence to Vortex Crystal. Phys. Rev. Lett. 1995, 75, 3277–3280. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kurakin, L.G.; Yudovich, V.I. The stability of stationary rotation of a regular vortex polygon. Chaos 2002, 12, 574–595. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.C. On the motion of vortices in two dimensions. I, II. Proc. Natl. Acad. Sci. USA 1941, 27, 575–577. [Google Scholar] [CrossRef] [Green Version]
- Milne-Thomson, L.M. Theoretical Hydrodynamics; Macmillan: London, UK, 1968. [Google Scholar]
- Havelock, T.H. The stability of motion of rectilinear vortices in ring formation. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1931, 11, 617–633. [Google Scholar] [CrossRef]
- Kurakin, L.G. Stability, resonances, and instability of the regular vortex polygons in the circular domain. Dokl. Phys. 2004, 49, 658–661. [Google Scholar] [CrossRef]
- Kurakin, L.G. On the Stability of Thomson’s Vortex Pentagon Inside a Circular Domain. Regul. Chaotic Dyn. 2012, 17, 150–169. [Google Scholar] [CrossRef]
- Kurakin, L.G.; Ostrovskaya, I.V. Stability of the Thomson Vortex Polygon with Evenly Many Vortices outside a Circular Domain. Sib. Math. J. 2010, 51, 463–474. [Google Scholar] [CrossRef]
- Kurakin, L.G. The stability of the steady rotation of a system of three equidistant vortices outside a circle. J. Appl. Math. Mech. 2011, 75, 227–234. [Google Scholar] [CrossRef]
- Kurakin, L.G.; Ostrovskaya, I.V. Nonlinear stability analysis of a regular vortex pentagon outside a circle. Regul. Chaotic Dyn. 2012, 17, 385–396. [Google Scholar] [CrossRef]
- Kurakin, L.G.; Melekhov, A.P.; Ostrovskaya, I.V. A survey of the stability criteria of Thomson’s vortex polygons outside a circular domain. Bol. Soc. Mat. Mex. 2016, 22, 733–744. [Google Scholar] [CrossRef]
- Kolmogorov, A.N. On conservation of conditionally periodic motions for a small change in hamilton’s function. Dokl. Akad. Nauk SSSR 1954, 98, 527–530. [Google Scholar]
- Arnold, V.I. Small denominators and problems of stability of motion in classical and celestial mechanics. Russ. Math. Surv. 1963, 18, 85–191. [Google Scholar] [CrossRef]
- Moser, J. Lectures on Hamiltonian Systems; Memoirs of the American Mathematical Society: Providence, RI, USA, 1968; Volume 81. [Google Scholar]
- Markeev, A.P. Libration Points in Celestial Mechanics and Space Dynamics; Nauka: Moscow, Russia, 1978. [Google Scholar]
- Khazin, L.G.; Shnol, E.E. Stability of Critical Equilibrium States; Manchester University Press: Manchester, NH, USA, 1991. [Google Scholar]
- Koshel, K.V.; Ryzhov, E.A.; Carton, X.J. Vortex Interactions Subjected to Deformation Flows: A Review. Fluids 2019, 4, 14. [Google Scholar] [CrossRef] [Green Version]
- Borisov, A.V.; Mamaev, I.S.; Romodanov, S.M. Dynamic interaction of point vortices and a two-dimentional cylinder. J. Math. Phys. 2007, 48, 065403. [Google Scholar] [CrossRef] [Green Version]
- Kurakin, L.G.; Lysenko, I.A.; Ostrovskaya, I.V.; Sokolovskiy, M.A. On stability of the Thomson’s vortex n-gon in the geostrophic model of the point vortices in two-layer fluid. J. Nonlinear Sci. 2019, 29, 1659–1700. [Google Scholar] [CrossRef]
- Kurakin, L.G.; Lysenko, I.A. On the stability of the orbit and the invariant set of Thomson’s vortex polygon in a two-fluid plasma. Rus. J. Nonlin. Dyn. 2020, 16, 3–11. [Google Scholar]
- Gantmacher, F.R. Lectures on Analytical Mechanics; Glavnaya Redaktsiya Fiziko-Matematicheskoj Literatury, Nauka: Moscow, Russia, 1966. [Google Scholar]
- Routh, E.J. A Treatise on the Stability of a Given State Motion; Macmillan: London, UK, 1877; 108p. [Google Scholar]
- Sokol’sky, A.G. On Stability of an Autonomous Hamiltonian System with Two Degrees of Freedom under First-Order Resonance. J. Appl. Math. Mech. 1977, 41, 20–28. [Google Scholar] [CrossRef]
- Markeev, A.P. Stability of a canonical system with two degrees of freedom in the presence of resonance. J. Appl. Math. Mech. 1968, 32, 766–772. [Google Scholar] [CrossRef]
- Bautin, N.N. Behavior of Dynamics Systems Near the Boundary of the Stability Region; Gostekhizdat: Moscow, Russia, 1984. [Google Scholar]
- Kurakin, L.G.; Ostrovskaya, I.V.; Sokolovskiy, M.A. On the stability of discrete tripole, quadrupole, Thomson’ vortex triangle and square in a two-layer/homogeneous rotating fluid. Regul. Chaotic Dyn. 2016, 21, 291–334. [Google Scholar] [CrossRef]
- Kurosh, A.G. Course of Higher Algebra; Nauka: Moscow, Russia, 1962. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | |||
|---|---|---|---|
| 2 | 0 | ||
| 3 | |||
| 4 | 0 | ||
| 5 | |||
| 6 | 0 |
| N | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kurakin, L.; Ostrovskaya, I. On the Effects of Circulation around a Circle on the Stability of a Thomson Vortex N-gon. Mathematics 2020, 8, 1033. https://doi.org/10.3390/math8061033
Kurakin L, Ostrovskaya I. On the Effects of Circulation around a Circle on the Stability of a Thomson Vortex N-gon. Mathematics. 2020; 8(6):1033. https://doi.org/10.3390/math8061033
Chicago/Turabian StyleKurakin, Leonid, and Irina Ostrovskaya. 2020. "On the Effects of Circulation around a Circle on the Stability of a Thomson Vortex N-gon" Mathematics 8, no. 6: 1033. https://doi.org/10.3390/math8061033
APA StyleKurakin, L., & Ostrovskaya, I. (2020). On the Effects of Circulation around a Circle on the Stability of a Thomson Vortex N-gon. Mathematics, 8(6), 1033. https://doi.org/10.3390/math8061033