
Complementary Airflow Control of Oscillating Water Columns for Floating Offshore Wind Turbine Stabilization

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
- Novel multi-purpose FOWT structure harvesting both wind and wave energy.
- Mathematical dynamic FOWT model incorporating OWC pressure and forces.
- Novel active structural control using the OWC devices.
- Complementary airflow control between the OWC devices for platform pitch and fore-aft displacement reduction.
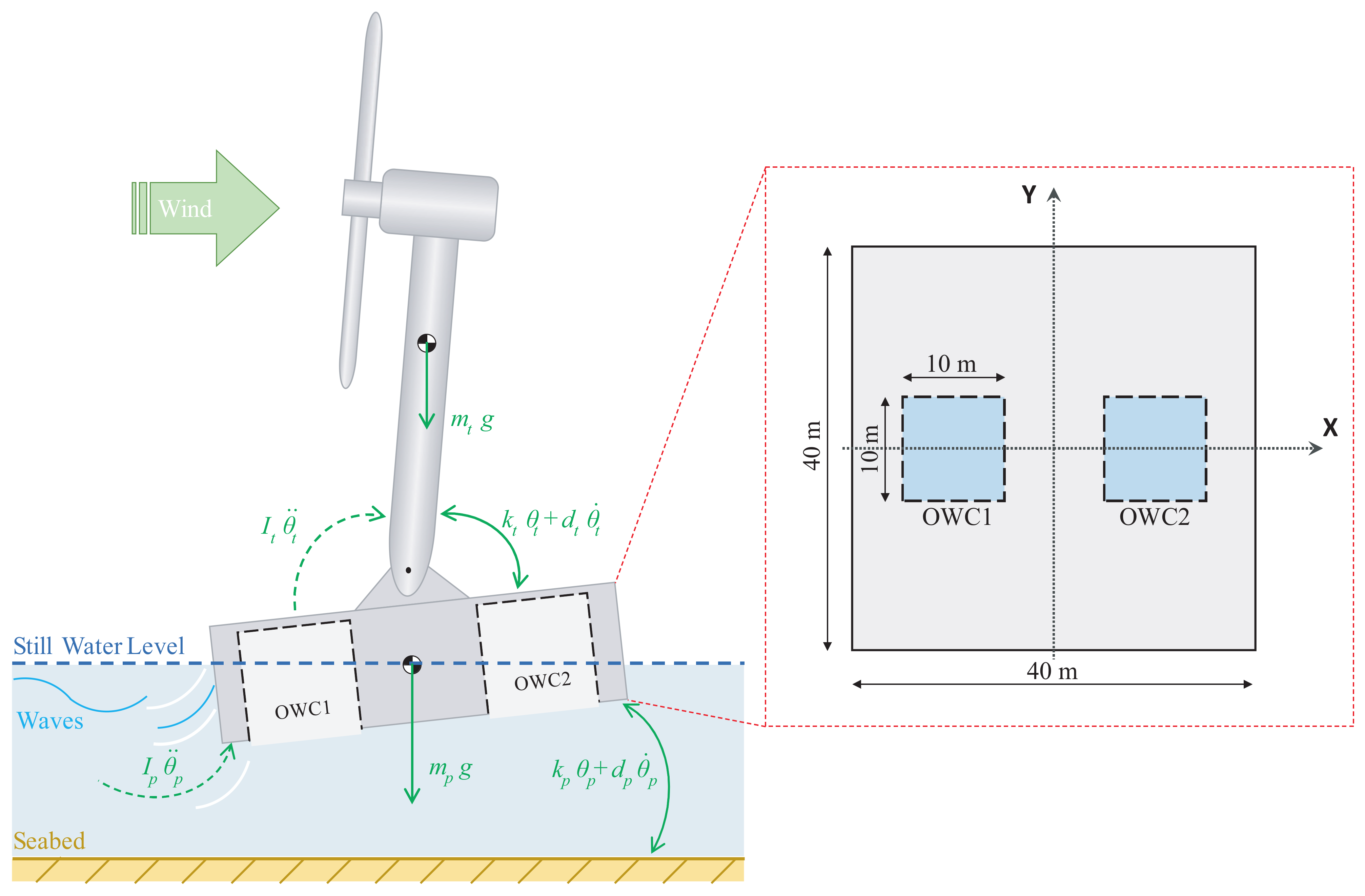
2. OWC-Based FOWT Platform Model
2.1. Dynamic Model of an OWC-Based FOWT
2.2. Oscillating Water Columns Forces
- The ocean waves are large enough to make the water free-surface inside the chambers oscillate as the same body (piston).
- The water free-surface inside the chamber only oscillates along the chamber’s vertical axis.
- The water free-surface is a rigid piston with a thickness that may be non-zero but the sum of the mass and added mass of the rigid piston is practically independent of its thickness.
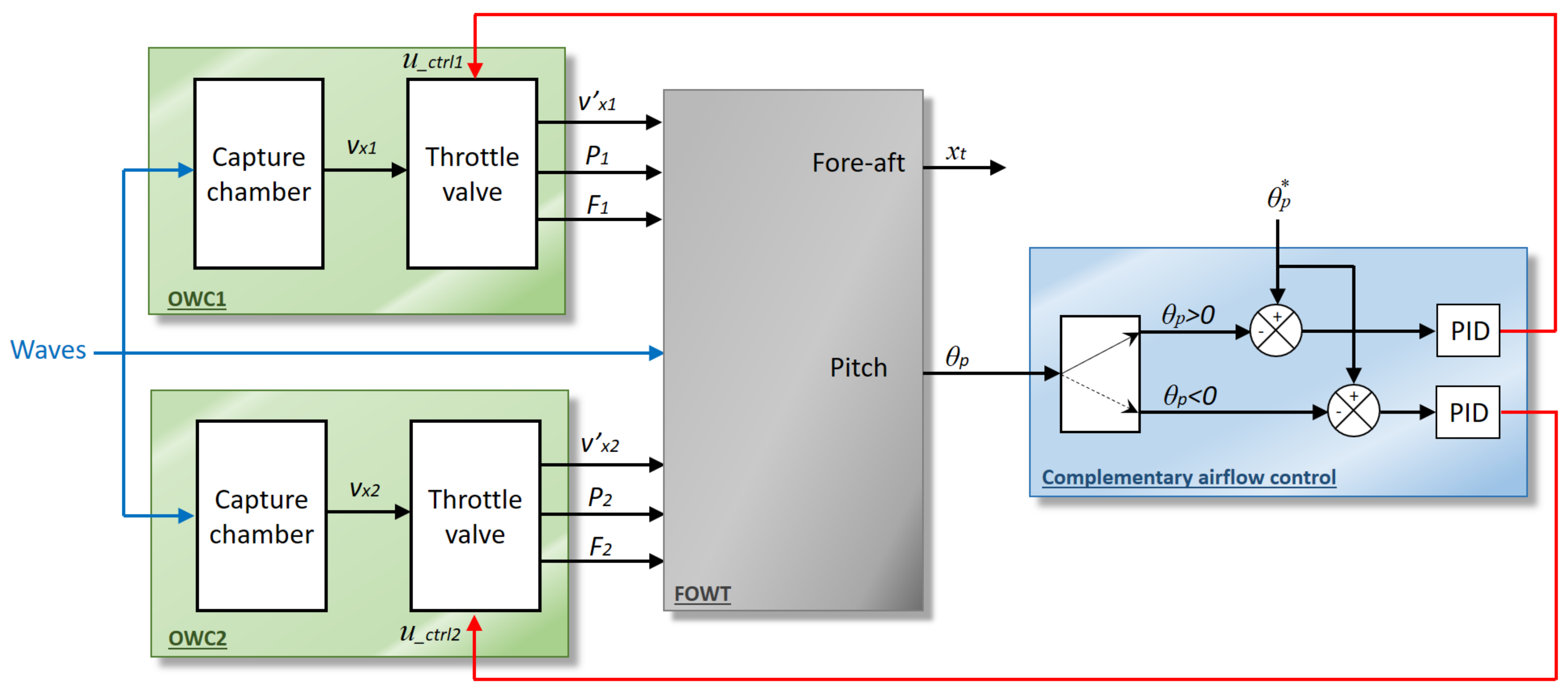
3. Proposed Complementary Airflow Control
4. Results and Discussions
4.1. Free Decay Response
4.2. Simulation Results with Different Waves
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Snyder, B.; Kaiser, M.J. Ecological and economic cost-benefit analysis of offshore wind energy. Renew. Energy 2009, 34, 1567–1578. [Google Scholar] [CrossRef]
- Kaldellis, J.K.; Kapsali, M. Shifting towards offshore wind energy-recent activity and future development. Energy Policy 2013, 53, 136–148. [Google Scholar] [CrossRef]
- Perez-Collazo, C.; Greaves, D.; Iglesias, G. A review of combined wave and offshore wind energy. Renew. Sustain. Energy Rev. 2015, 42, 141–153. [Google Scholar] [CrossRef] [Green Version]
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine; (No. NREL/TP-500-41958); National Renewable Energy Lab. (NREL): Golden, CO, USA, 2007.
- Jonkman, J.M.; Matha, D. A Quantitative Comparison of the Responses of Three Floating Platform Concepts; (No. NREL/CP-500e46726); National Renewable Energy Lab. (NREL): Golden, CO, USA, 2010.
- Lackner, M.A. Controlling platform motions and reducing blade loads for floating wind turbines. Wind Eng. 2009, 33, 541–553. [Google Scholar] [CrossRef]
- Staino, A.; Basu, B. Emerging trends in vibration control of wind turbines: A focus on a dual control strategy. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140069. [Google Scholar] [CrossRef] [PubMed]
- Dinh, V.N.; Basu, B.; Nagarajaiah, S. Semi-active control of vibrations of spar type floating offshore wind turbines. Smart Struct. Syst. 2016, 18, 683–705. [Google Scholar]
- Lackner, M.A.; Rotea, M.A. Passive structural control of offshore wind turbines. Wind Energy 2011, 14, 373–388. [Google Scholar] [CrossRef]
- Si, Y.; Karimi, H.R.; Gao, H. Modeling and parameter analysis of the OC3-Hywind floating wind turbine with a tuned mass damper in nacelle. J. Appl. Math. 2013, 2013, 679071. [Google Scholar] [CrossRef] [Green Version]
- Luo, N.; Pacheco, L.; Vidal Seguí, Y.; Li, H. Smart structural control strategies for offshore wind power generation with floating wind turbines. Renew. Energ. Power Qual. J. (RE&PQJ) 2012, 10, 1200–1205. [Google Scholar]
- Stewart, G.M.; Lackner, M.A. Offshore wind turbine load reduction employing optimal passive tuned mass damping systems. IEEE Trans. Control Syst. Technol. 2013, 21, 1090–1104. [Google Scholar] [CrossRef]
- He, E.M.; Hu, Y.Q.; Zhang, Y. Optimization design of tuned mass damper for vibration suppression of a barge-type offshore floating wind turbine. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2017, 231, 302–315. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, J.; Chen, M.Z.; Li, Z.; Sun, Y. Load mitigation for a barge-type floating offshore wind turbine via inerter-based passive structural control. Eng. Struct. 2018, 177, 198–209. [Google Scholar] [CrossRef]
- Lackner, M.A.; Rotea, M.A. Structural control of floating wind turbines. Mechatronics 2011, 21, 704–719. [Google Scholar] [CrossRef]
- Si, Y.; Karimi, H.R. Gain scheduling H2/H∞ structural control of a floating wind turbine. IFAC Proc. Vol. 2014, 47, 6788–6793. [Google Scholar] [CrossRef]
- Hu, Y.; He, E. Active structural control of a floating wind turbine with a stroke-limited hybrid mass damper. J. Sound Vib. 2017, 410, 447–472. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, X.; Wei, X. Robust structural control of an underactuated floating wind turbine. Wind Energy 2020, 23, 2166–2185. [Google Scholar] [CrossRef]
- Hu, J.; Zhou, B.; Vogel, C.; Liu, P.; Willden, R.; Sun, K.; Zang, J.; Geng, J.; Jin, P.; Cui, L.; et al. Optimal design and performance analysis of a hybrid system combing a floating wind platform and wave energy converters. Appl. Energy 2020, 269, 114998. [Google Scholar] [CrossRef]
- Sarmiento, J.; Iturrioz, A.; Ayllón, V.; Guanche, R.; Losada, I.J. Experimental modelling of a multi-use floating platform for wave and wind energy harvesting. Ocean Eng. 2019, 173, 761–773. [Google Scholar] [CrossRef]
- Yu, J.; Li, Z.; Yu, Y.; Hao, S.; Fu, Y.; Cui, Y.; Xu, L.; Wu, H. Design and Performance Assessment of Multi-Use Offshore Tension Leg Platform Equipped with an Embedded Wave Energy Converter System. Energies 2020, 13, 3991. [Google Scholar] [CrossRef]
- Kluger, J.M.; Slocum, A.H.; Sapsis, T.P. A First-Order Dynamics and Cost Comparison of Wave Energy Converters Combined with Floating Wind Turbines. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017; pp. 577–585. [Google Scholar]
- Slocum, A.; Kluger, J.; Mannai, S. Energy Harvesting and Storage System Stabilized Offshore Wind Turbines. In Proceedings of the 2019 Offshore Energy and Storage Summit (OSES), Brest, France, 10–12 July 2019; pp. 1–6. [Google Scholar]
- Kamarlouei, M.; Gaspar, J.F.; Calvario, M.; Hallak, T.S.; Mendes, M.J.; Thiebaut, F.; Soares, C.G. Experimental analysis of wave energy converters concentrically attached on a floating offshore platform. Renew. Energy 2020, 152, 1171–1185. [Google Scholar] [CrossRef] [Green Version]
- Vijfhuizen, W.J.M.J. Design of a Wind and Wave Power Barge. Master’s Dissertation, Department of Naval Architecture and Mechanical Engineering, Universities of Glasgow and Strathclyde, Glasgow, Scotland, September 2006. [Google Scholar]
- M’zoughi, F.; Garrido, I.; Bouallègue, S.; Ayadi, M.; Garrido, A.J. Intelligent Airflow Controls for a Stalling-Free Operation of an Oscillating Water Column-Based Wave Power Generation Plant. Electronics 2019, 8, 70. [Google Scholar] [CrossRef] [Green Version]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; De La Sen, M. ANN-Based Airflow Control for an Oscillating Water Column Using Surface Elevation Measurements. Sensors 2020, 20, 1352. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; De La Sen, M. Self-Adaptive Global-Best Harmony Search Algorithm-Based Airflow Control of a Wells-Turbine-Based Oscillating-Water Column. Appl. Sci. 2020, 10, 4628. [Google Scholar] [CrossRef]
- Jonkman, J. Influence of control on the pitch damping of a floating wind turbine. In Proceedings of the 46th IEEE Aerospace Science Meeting Exhibit, Reno, NV, USA, 7–10 January 2008; pp. 1–15. [Google Scholar]
- Aboutalebi, P.; M’zoughi, F.; Garrido, I.; Garrido, A.J. Performance Analysis on the Use of Oscillating Water Column in Barge-Based Floating Offshore Wind Turbines. Mathematics 2021, 9, 475. [Google Scholar] [CrossRef]
- Aubault, A.; Alves, M.; Sarmento, A.N.; Roddier, D.; Peiffer, A. Modeling of an oscillating water column on the floating foundation WindFloat. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 235–246. [Google Scholar]
- Henriques, J.C.C.; Sheng, W.; Falcão, A.; Gato, L.M.C. A comparison of biradial and wells air turbines on the Mutriku breakwater OWC wave power plant. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering, Trondheim, Norway, 25–30 June 2017; pp. 1–12. [Google Scholar]
- M’zoughi, F.; Bouallegue, S.; Garrido, A.J.; Garrido, I.; Ayadi, M. Fuzzy gain scheduled PI-based airflow control of an oscillating water column in wave power generation plants. IEEE J. Ocean. Eng. 2018, 44, 1058–1076. [Google Scholar] [CrossRef]
- Torresi, M.; Camporeale, S.M.; Strippoli, P.D.; Pascazio, G. Accurate numerical simulation of a high solidity Wells turbine. Renew. Energy 2008, 33, 735–747. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Turbine | ITI Energy Barge | ||
|---|---|---|---|
| Feature | Value | Feature | Value |
| Rating power | 5 MW | Platform size | 40 m × 40 m × 10 m |
| Baseline control | Variable speed, collective pitch | Platform mass including Ballast | 5,452,000 kg |
| Cut-in, rated, cut-out wind speed | 3 m/s, 11.4 m/s, 25 m/s | Anchor depth | 150 m |
| Cut-in, rated rotor speed | 6.9 rpm, 12.1 rpm | Number of mooring lines | 8 |
| Tower mass | 347, 460 kg | Line diameter | 0.0809 m |
| Rotor diameter | 126 m | Line mass density | 130.4 kg/m |
| Hub height | 90 m | ||
| Tower | Barge Platform | ||
|---|---|---|---|
| Parameter | Value | Parameter | Value |
| Stiffness | = 9.7990 10 (N m rad) | Stiffness | = 1.4171 10 (N m rad) |
| Damping coefficient | = 2.1032 10 (N m s rad) | Damping coefficient | = 3.6374 10 (N m s rad) |
| Inertia | = 1.8217 10 (kg m) | Inertia | = 1.6945 10 (kg m) |
| Capture Chamber | Wells Turbine | ||
|---|---|---|---|
| Feature | Value | Feature | Value |
| Chamber’s inner width | = 10 m | Blade number | n = 5 |
| Chamber’s inner length | = 10 m | Blade span | b = 0.21 m |
| Chamber’s inner height | = 10 m | Blade chord length | l = 0.165 m |
| Water density | = 1029 kg/m | Turbine mean radius | r = 0.375 m |
| Atmospheric density | = 1.19 kg/m | Cross-sectional area | a = 0.4417 m |
| Atmospheric pressure | = 101.325 kPa | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
M’zoughi, F.; Aboutalebi, P.; Garrido, I.; Garrido, A.J.; De La Sen, M. Complementary Airflow Control of Oscillating Water Columns for Floating Offshore Wind Turbine Stabilization. Mathematics 2021, 9, 1364. https://doi.org/10.3390/math9121364
M’zoughi F, Aboutalebi P, Garrido I, Garrido AJ, De La Sen M. Complementary Airflow Control of Oscillating Water Columns for Floating Offshore Wind Turbine Stabilization. Mathematics. 2021; 9(12):1364. https://doi.org/10.3390/math9121364
Chicago/Turabian StyleM’zoughi, Fares, Payam Aboutalebi, Izaskun Garrido, Aitor J. Garrido, and Manuel De La Sen. 2021. "Complementary Airflow Control of Oscillating Water Columns for Floating Offshore Wind Turbine Stabilization" Mathematics 9, no. 12: 1364. https://doi.org/10.3390/math9121364
APA StyleM’zoughi, F., Aboutalebi, P., Garrido, I., Garrido, A. J., & De La Sen, M. (2021). Complementary Airflow Control of Oscillating Water Columns for Floating Offshore Wind Turbine Stabilization. Mathematics, 9(12), 1364. https://doi.org/10.3390/math9121364