1. Introduction
Since the first work by Cosserat and Cosserat [
1], who introduced the theory of the so-called micropolar materials, there were several models to extend it to other type of elastic materials. For instance, assuming that the bulk density is equal to the product of the density matrix by the volume fraction, Cowin and Nunziato [
2,
3] introduced the theory of elastic solids with voids, where the pores are distributed within the material. Rocks, woods, biological materials (as bones), or soils are some examples of this kind of materials. Later, heat effects were also included and the number of papers dealing with these porous-thermoelastic problems is really huge (see, among others, [
4,
5,
6,
7,
8,
9]), and their numerical issues [
10,
11,
12,
13,
14,
15].
It is well-known that there is a paradox of instantaneous propagation of the thermal waves in the classical heat theory provided by the Fourier law. In order to overcome it, several proposals were made since 1990. One of them was proposed by Green and Naghdi [
16], where a new variable, the thermal displacement, was considered. Here, we will study the type II theory, which is also called thermoelasticity without energy dissipation.
In this paper, we also assume that the process is quasi-static and so, we neglect the inertia term in the motion equation. This expression was intorduced by Mosconi [
17] and we note that the system of equations that we obtain differs substantially from the original one, leading to a mixture of some parabolic and hyperbolic equations. One interesting question is, therefore, if the behavior of the solution with respect to the time variable remains unaltered in the quasi-static case. The number of contributions has increased over the last years (see, among others, [
18,
19,
20,
21]). In a recent article by Magaña and Quintanilla [
22], they considered that this quasi-static hypothesis was also imposed in the volume fraction and in the temperature. So, it led to a set of different problems for which they proved the existence and uniqueness of solution and the slow or exponential energy decay. Here, we continue this research, aiming to provide an a priori error analysis of a fully discrete approximation and to perform some numerical simulations.
The paper is structured in the following way. In
Section 2, we describe the thermo-mechanical problem following [
22] and we recall an existence and uniqueness result. Then, in
Section 3, we present the discrete problem, using the finite element method to approximate the spatial variable and the implicit Euler scheme to discretize the time derivatives. A discrete stability property and a priori error estimates are proved, from which the linear convergence of the algorithm is deduced under adequate additional regularity. Finally, in
Section 4, some numerical results are presented to demonstrate the accuracy of the algorithm and the behavior of the solution.
2. The Thermo-Mechanical Problem and Its Variational Formulation
In this section, we describe briefly the problem and we recall an existence and uniqueness result (see [
22] for further details).
Without loss of generality, we suppose that the spatial variable x lies in the interval and that the time t goes from 0 to T, where denotes the final time. Moreover, the subscript x indicates the spatial derivative and a dot over a variable represents the time derivative.
Defining the displacement field, the porosity field and the temperature field by u, and , respectively, the porous-thermo-mechanical problem is written as follows.
Find the displacement field
, the porosity field
and the temperature field
such that
where
,
,
b,
,
J,
,
,
m,
c and
are constitutive parameters satisfying some conditions which will be detailed later, and
,
,
,
and
are given initial conditions. The influence of the dissipation constants
and
will be numerically studied in
Section 4.2.
In what follows, we obtain the variational formulation of the thermo-mechanical problem (
1)–(
6). Let
, and denote by
the scalar product in this space, with corresponding norm
. Moreover, let us define
with norm
.
Let us denote by
and
the velocity and porosity speed. Therefore, integrating by parts it leads to the following variational formulation of problem (
1)–(
6).
Find the velocity field
, the porosity speed
and the temperature
such that
,
,
and, for a.e.
and
,
where the displacement and the porosity fields
u and
are recovered from the equations:
The following existence and uniqueness result has been recently proved in [
22].
Theorem 1. Assume that the constitutive coefficients satisfy the following conditions: Then, there exists a unique solutionto problem (1)–(6). Regarding the energy decay, it was also proved in [
22] that the energy of the system related to problem (
1)–(
6) decays in a slow way. However, if we replace the Fourier law by the type II thermal law (see Remark 1), then using the theory of linear semigroups it was shown in [
22] that the energy decays in an exponential way.
3. An a Priori Error Analysis
In this section, we study a fully discrete approximation of the porous-thermo-mechanical problem (
1)–(
6) described in the previous section. First, in order to obtain the spatial approximation, we assume that the interval
is divided into
M subintervals
of length
. Therefore, to approximate the variational space
V, we define the finite dimensional space
given by
where
represents the space of polynomials of degree less or equal to one in the subinterval
; i.e., the finite element space
is made of continuous and piecewise affine functions. Here,
denotes the spatial discretization parameter. Furthermore, let the discrete initial conditions
,
,
,
and
be defined as
where
is the classical finite element interpolation operator over
(see [
23]).
Secondly, we consider a uniform partition of the time interval , denoted by , with step size and nodes for .
Therefore, using the well-known implicit Euler scheme, the fully discrete approximations of the above variational problem are the following.
Find the discrete velocity
, the discrete porosity speed
and the discrete temperature
such that
,
,
and, for all
and
,
where the discrete displacement and the discrete porosity
and
are now recovered from the equations:
We note that, using the well-known Lax Milgram lemma (see, for instance, [
23]) and the required assumptions on the constitutive parameters, it is straightforward to obtain that discrete problem (
11)–(
14) has a unique solution.
Remark 1. Proceeding as in the derivation of variational problems (7)–(10) and (11)–(14) we could study the rest of the problems considered in [22]. In particular, we could study the following problem which involves the type II thermal law, which is written as: Find the displacement field , the porosity field and the temperature field such thatwhere α represents the thermal displacement which satisfies , l is a new constitutive parameter, and , , , , and are given initial conditions. Therefore, the resulting variational problem is written as follows. Find the velocity field , the porosity speed and the temperature such that , , and, for a.e. and ,where the displacement, the porosity and the thermal displacement u, φ and α are recovered from the equations: So this problem is approximated by the discrete problem defined by the following.
Find the discrete velocity , the discrete porosity speed and the discrete temperature such that , , and, for all and ,where the discrete displacement , the discrete porosity and the discrete thermal displacement are now recovered from the equations: We will prove now a discrete stability property for problem (
11)–(
14).
Lemma 1. Let the assumptions of Theorem 1 hold. It follows that the sequences , generated by discrete problem (11)–(14), satisfy the stability estimate:where C is a positive constant which is independent of the discretization parameters h and k. Proof. Taking
as a test function in variational Equation (
11) we find that
and, using the Cauchy’s inequality
we get the following estimates for the velocity field:
Now, we deal with the porosity speed. Thus, taking
s a test function in variational Equation (
12) we have
taking into account that
and using again inequality (
15) after several simple calculations it leads to the following estimates
Finally, we obtain the estimates on the discrete temperature. Therefore, taking
as a test function in variational Equation (
13) we get
and using inequality (
15) several times and keeping in mind that
we find the following estimates:
Combining estimates (
17)–(
18) we obtain
Multiplying the above estimates by
k and summing up to
n we have
Combining estimates (
16) and (
19) it follows that
Now, using the definition of the discrete displacements we easily find that
and applying a discrete version of Gronwall’s inequality (see, e.g., [
24]) we conclude the desired stability property. □
In the rest of the section, we will prove some a priori error estimates on the numerical errors , , , and .
Theorem 2. Let the assumptions of Theorem 1 still hold. If we denote by the solution to problem (7)–(10) and by the solution to problem (11)–(14), then we have the following a priori error estimates, for all ,where C is again a positive constant which does not depend on parameters h and k, and is the integration error given by Proof. As a first step, we get some error estimates for the velocity field. So, we subtract variational Equation (
7) at time
for a test function
and discrete variational Equation (
11) to obtain, for all
,
Therefore, it follows that, for all
,
Using several times inequality (
15) we get the following estimates for the velocity field, for all
,
Now, we obtain the error estimates for the porosity speed. Thus, subtracting variational Equation (
8) at time
for a test function
and discrete variational Equation (
12) we get, for all
,
and so, for all
we have
Keeping in mind that
using inequality (
15) we obtain the following estimates, for all
,
Finally, we obtain the error estimates for the temperature field. Then, we subtract variational Equation (
9) at time
for a test function
and discrete variational Equation (
13) we get, for all
,
and so, we find that, for all
,
Taking into account that
we have, for all
,
Now, we combine estimates (
22) and (
23) to obtain
Multiplying the above estimates by
k and summing up to
n it follows that
and, together with estimates (
21), it leads to
Finally, keeping in mind that
where
is the integration error defined in (
20), using again a discrete version of Gronwall’s inequality (see [
24]) we obtain the desired a priori error estimates. □
The estimates provided in the above theorem can be used to obtain the convergence order of the approximations given by discrete problem (
11)–(
14). Hence, as an example, if we assume the additional regularity:
we obtain the linear convergence of the algorithm applying some results on the approximation by finite elements (see [
23]) and previous estimates already derived in [
24], that is, we can prove that there exists a positive constant
, independent of the discretization parameters
h and
k, such that
5. Conclusions
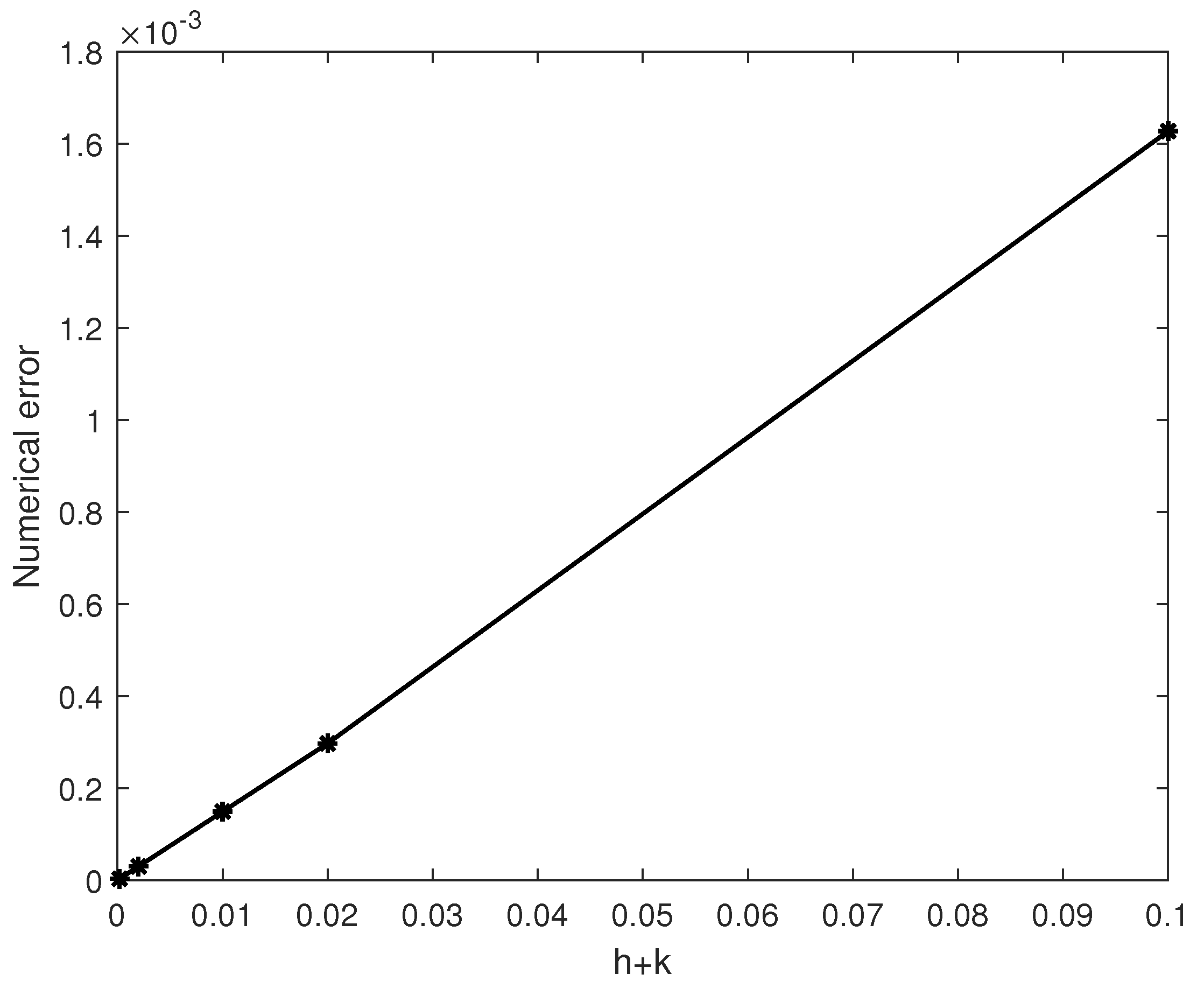
In this paper, we have studied, from the numerical point of view, several porous-thermoelastic problems assuming that the inertia effects are negligible (and so, the problems became quasi-static). As an example, we have focused on the study of the quasi-static porous-thermoelastic problem where the thermal law was modeled by the classical Fourier law. By using the implicit Euler scheme and the finite element method to discretize both the time derivatives and spatial variable, fully discrete approximations have been introduced. A discrete stability property and a priori error estimates have been proved, and the linear convergence has been deduced under some adequate additional regularity. Finally, we have provided some numerical simulations to show the numerical convergence of the algorithm in
Section 4.1, where the linear convergence seems to be achieved. Then, in
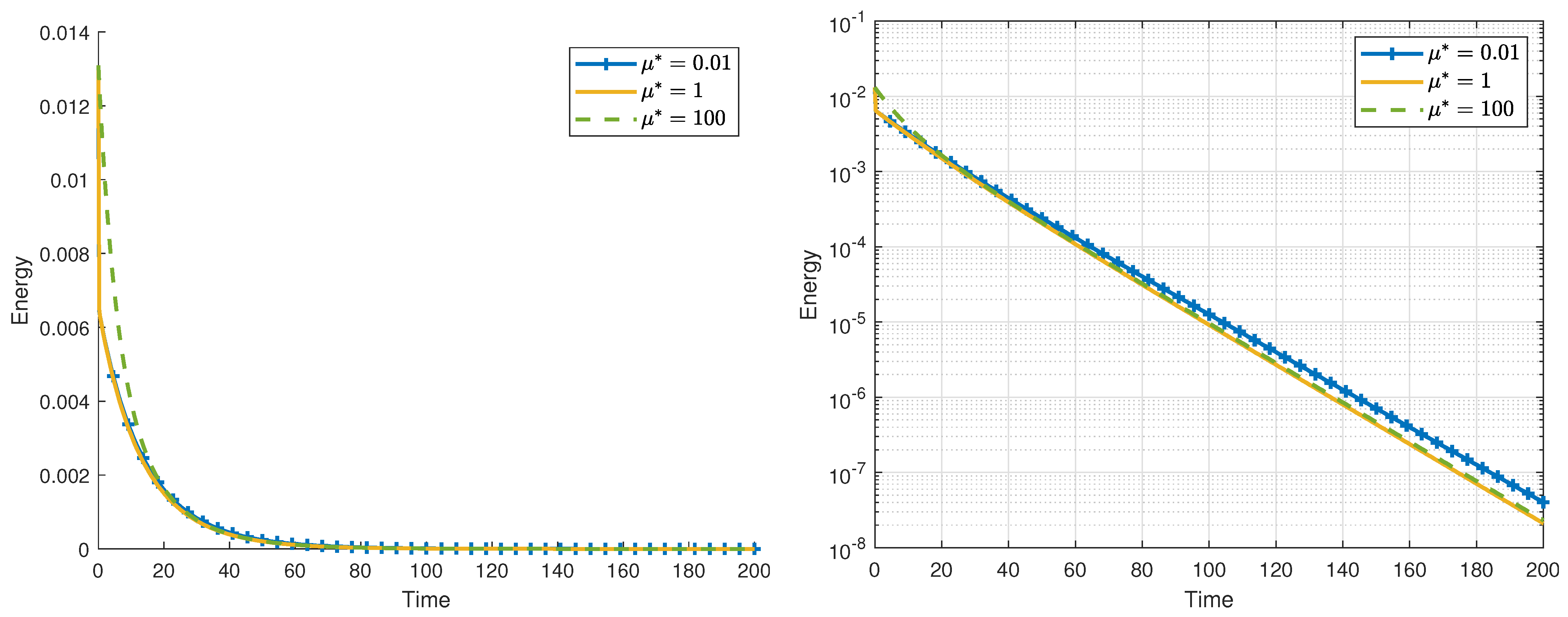
Section 4.2 a parametric study has been performed with respect to dissipative parameters
and
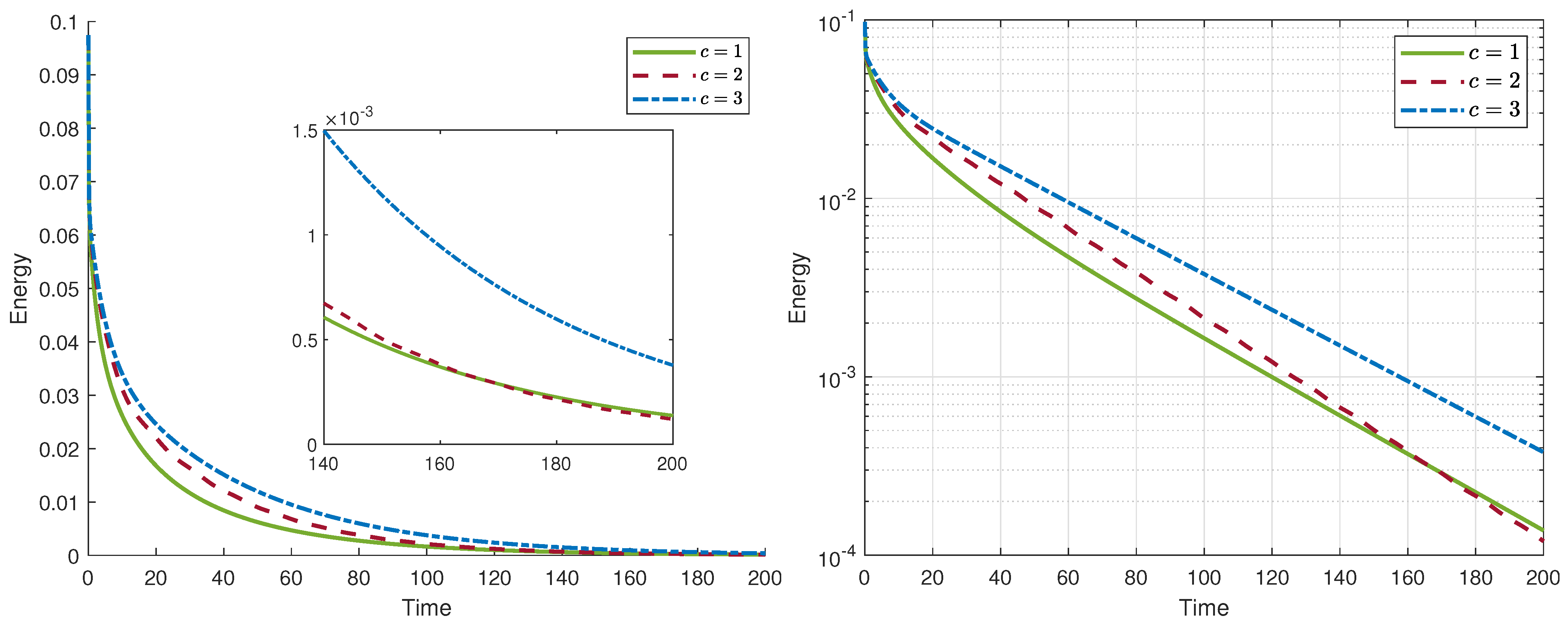
. Finally, the problem involving the so-called type II thermal law has been considered. A detailed analysis on some constitutive coefficients, as suggested in [
22], has been shown.
At this time, the lack of experimental results does not allow to show which model is closer to reality. Both models behave similarly from a numerical point of view. In addition, the performance and complexity is similar in both cases. Therefore, the selection of the most appropriate model will depend on the specific application.









{kind=link}
{kind=link}
{kind=link}
{kind=link}