
Size Effects in Finite Element Modelling of 3D Printed Bone Scaffolds Using Hydroxyapatite PEOT/PBT Composites

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction

2. Materials and Methods
2.1. Materials
2.2. Methods
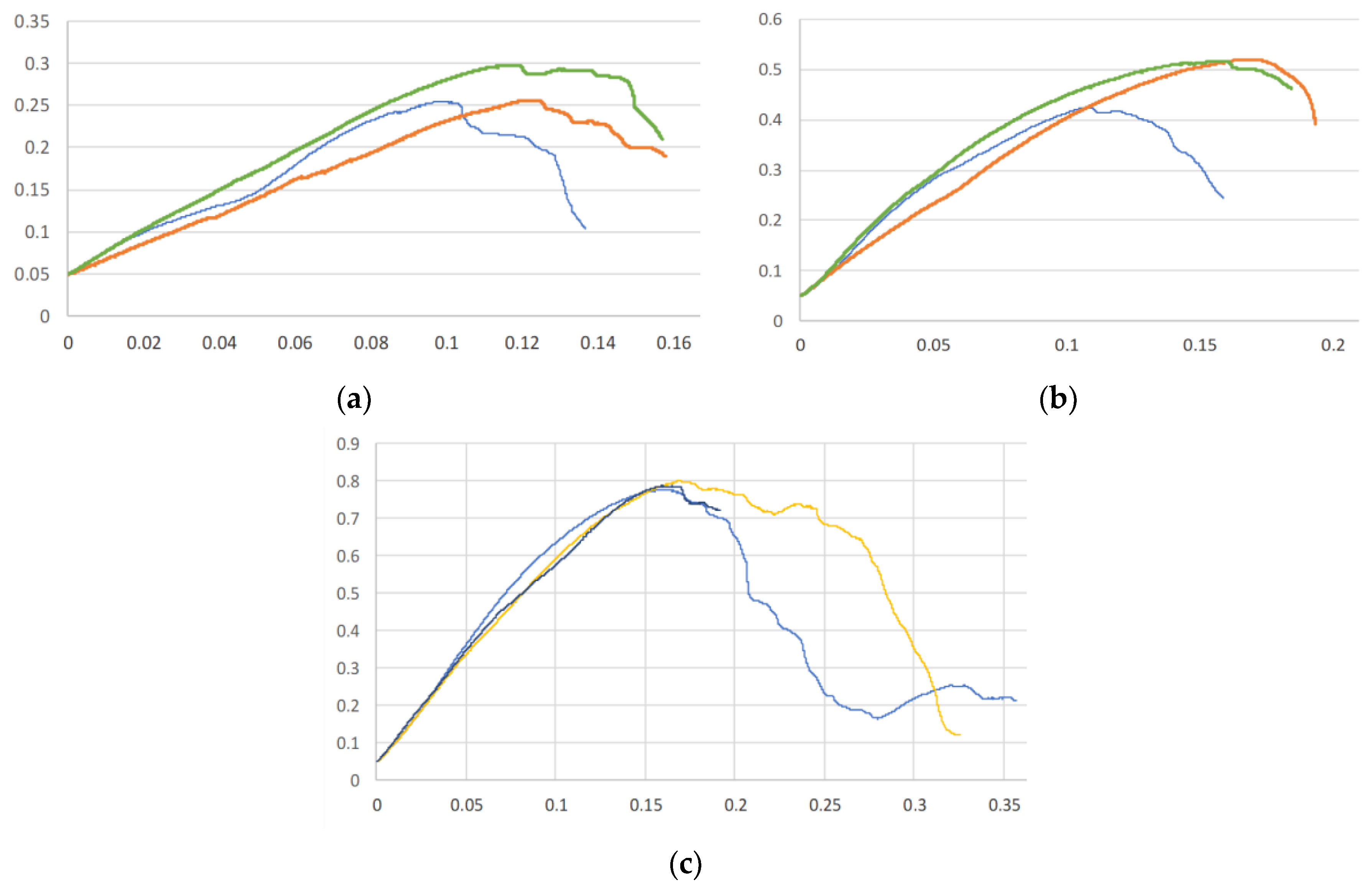
3. Results
3.1. G25_nanoHA 1.25
3.2. G25_nanoHA_1.00
3.3. G25_nanoHA_0.75
4. Discussion
4.1. Sensitivity Analysis
4.1.1. Poisson’s Ratio of the Base Material
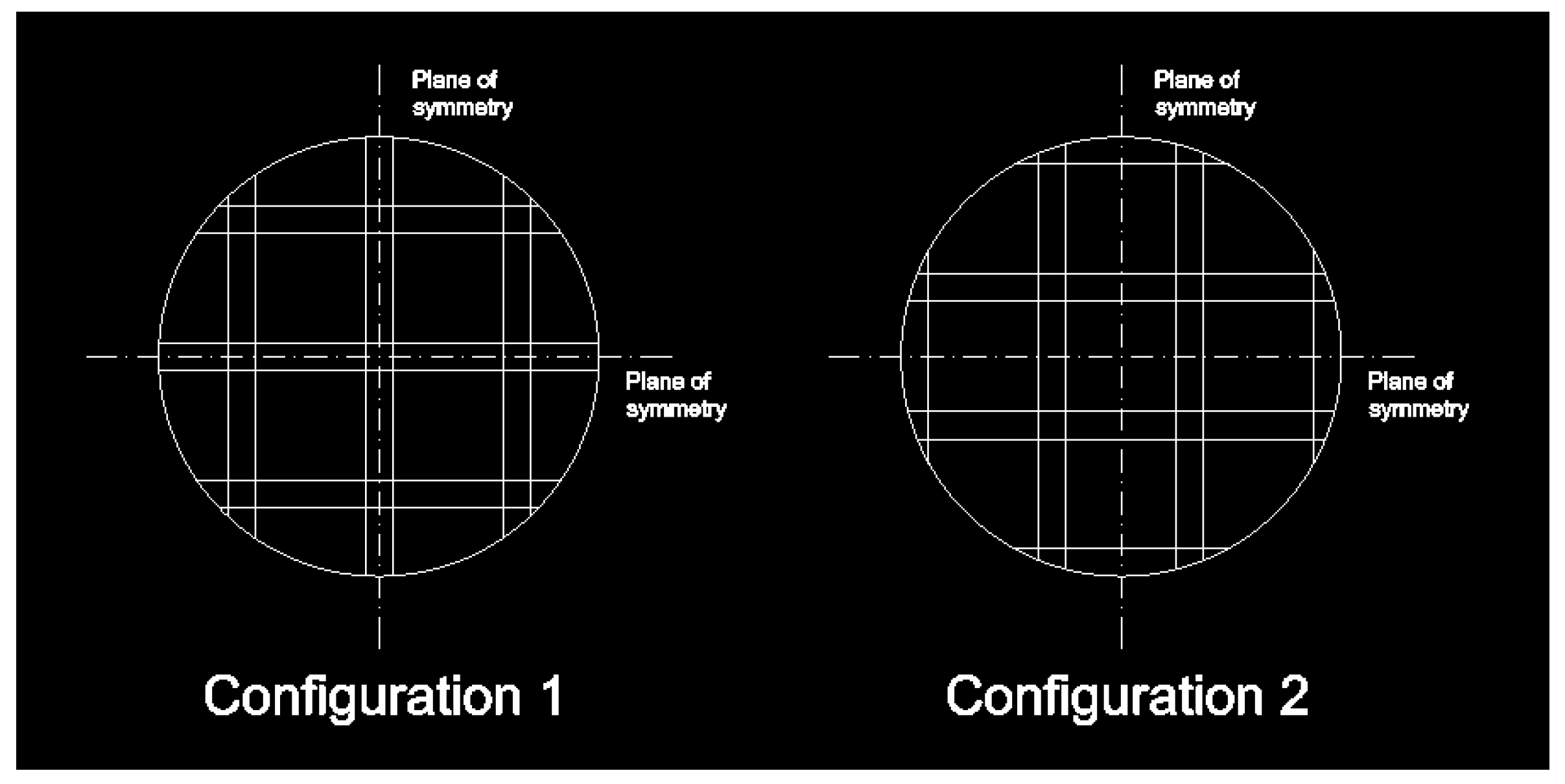
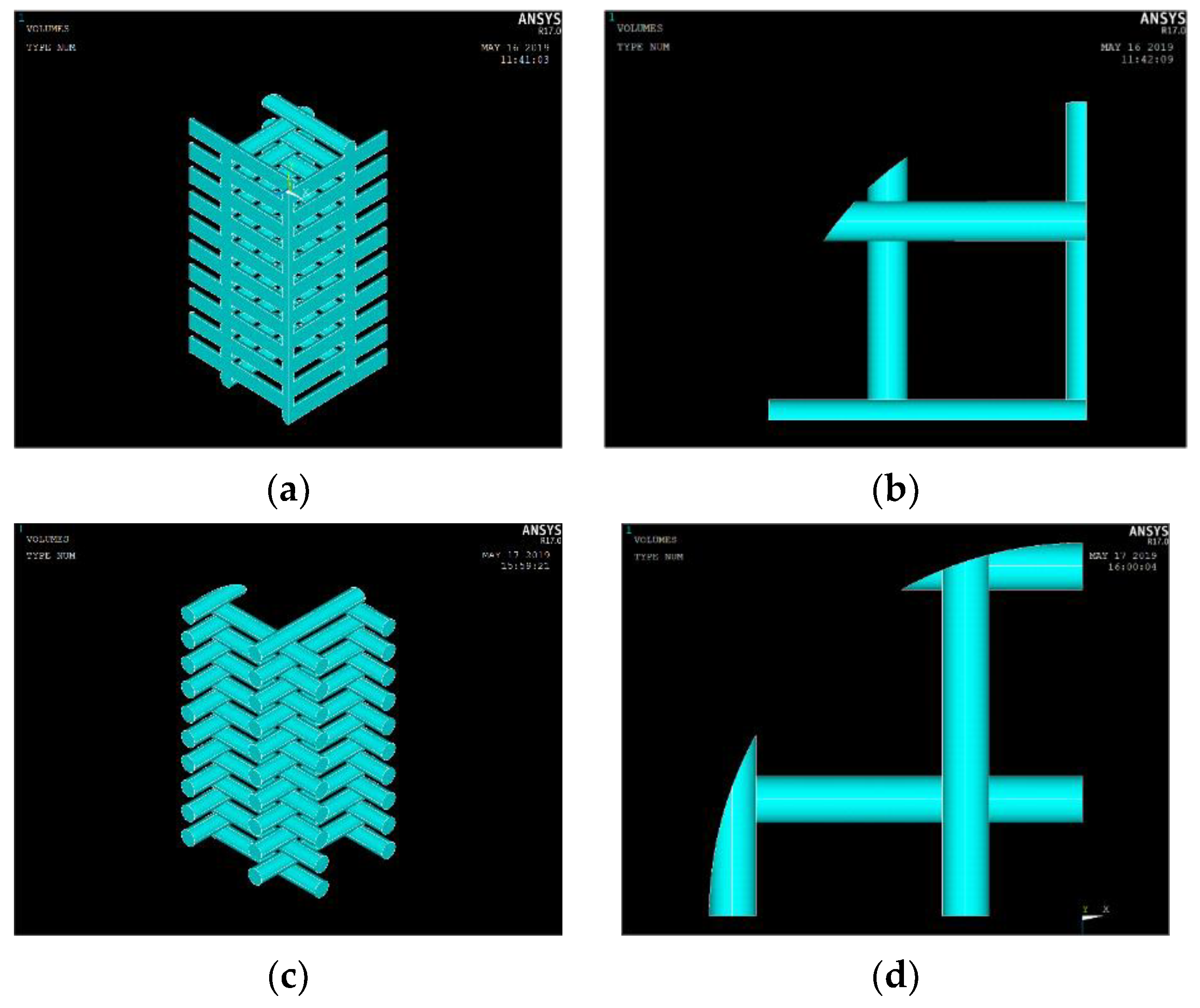
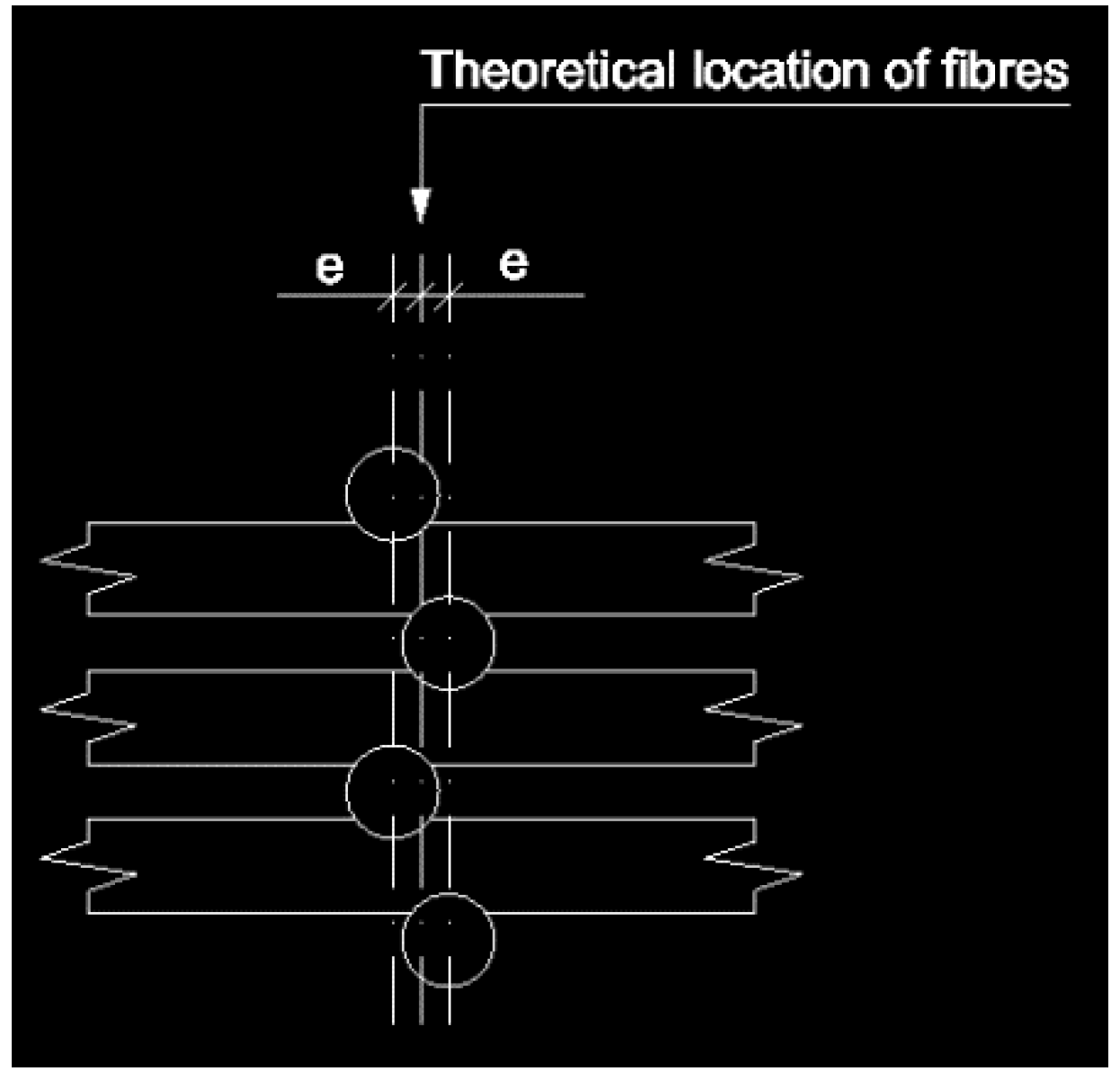
4.1.2. Position of the Fibres within the Scaffold
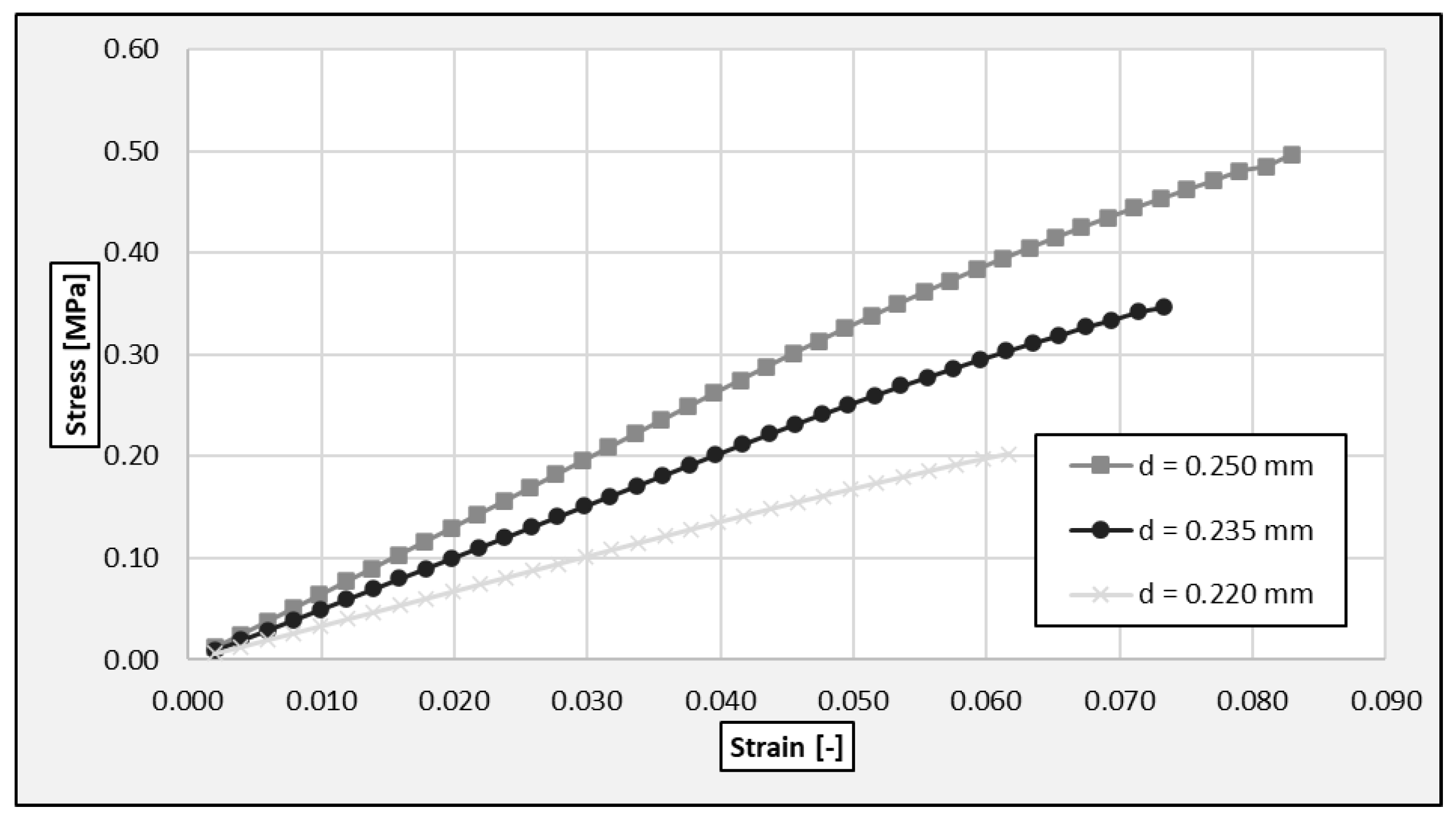
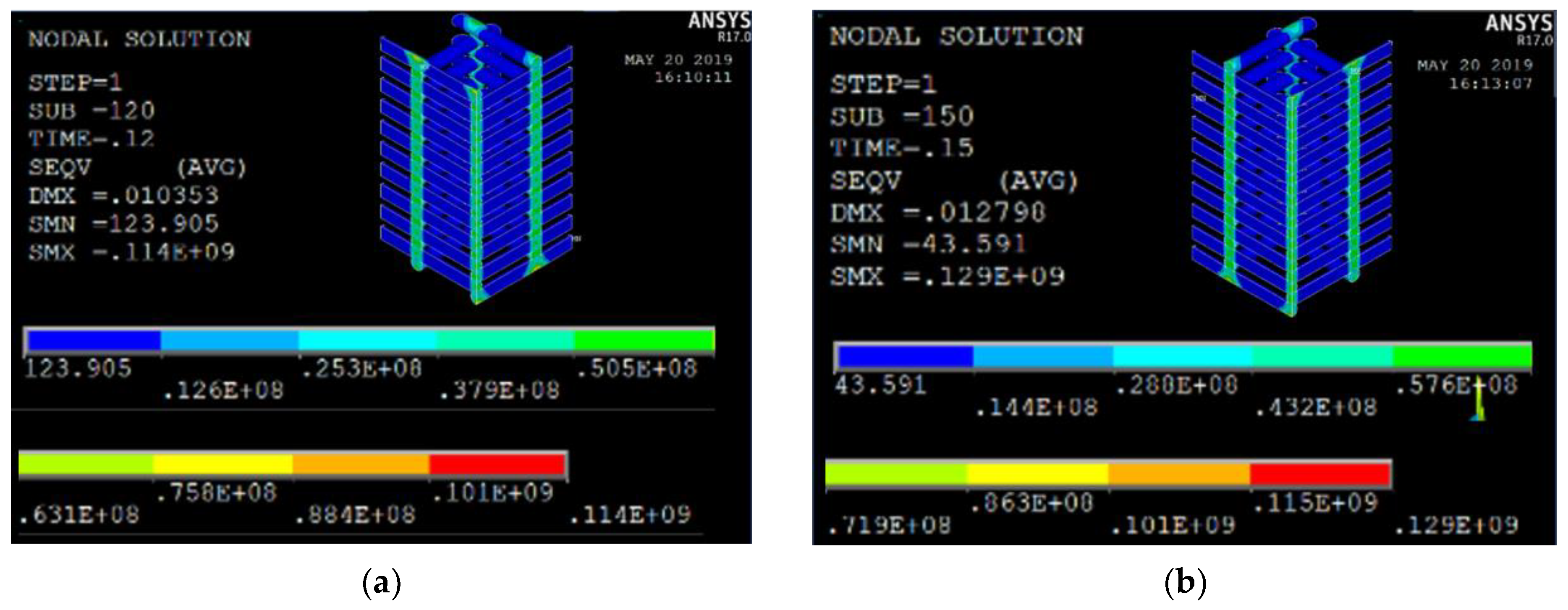
4.1.3. Fibre Diameter
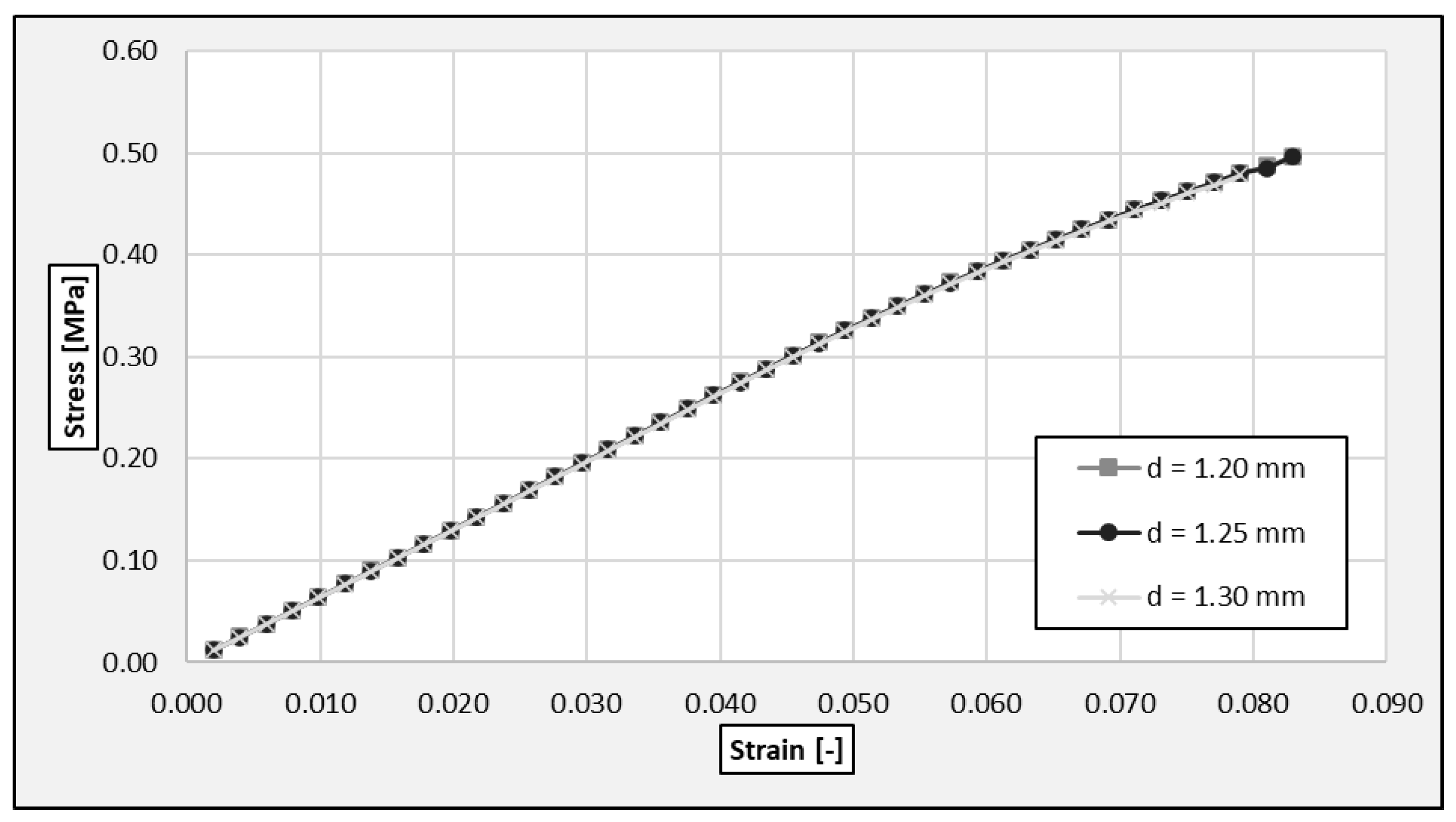
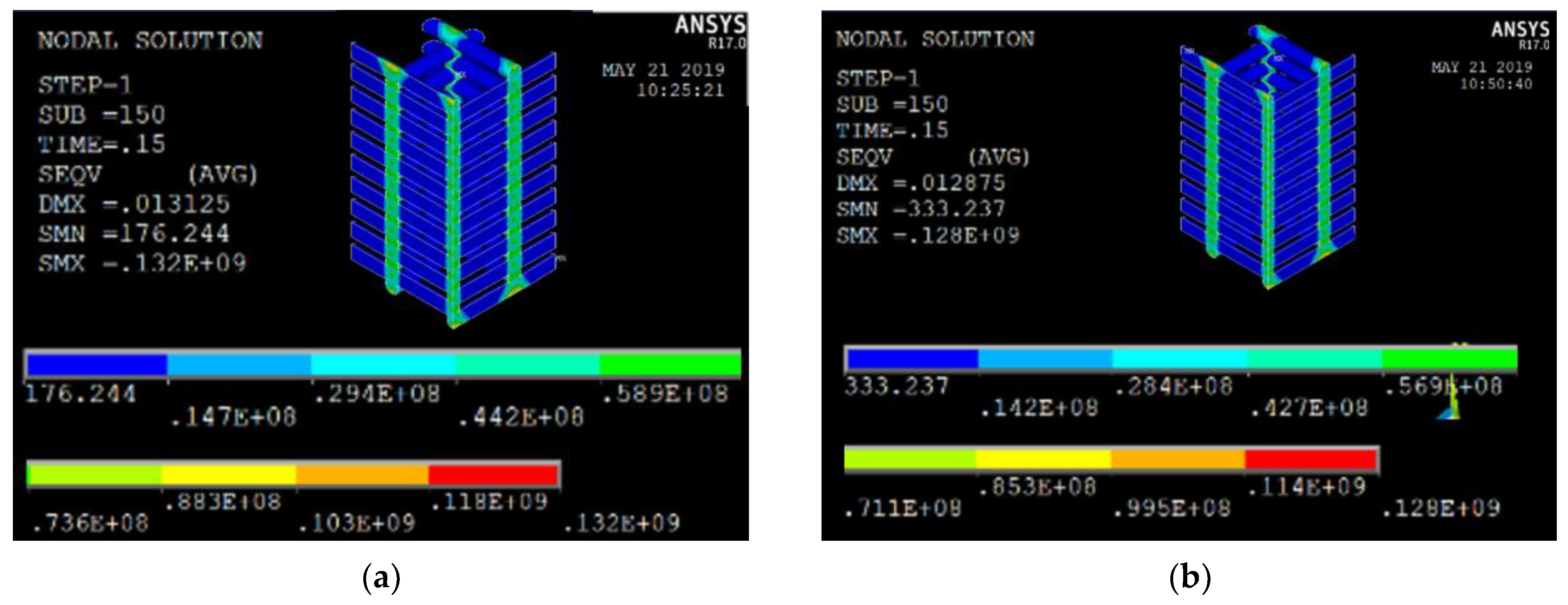
4.1.4. Strand Distance
4.1.5. Layer Height
4.1.6. Sample Diameter
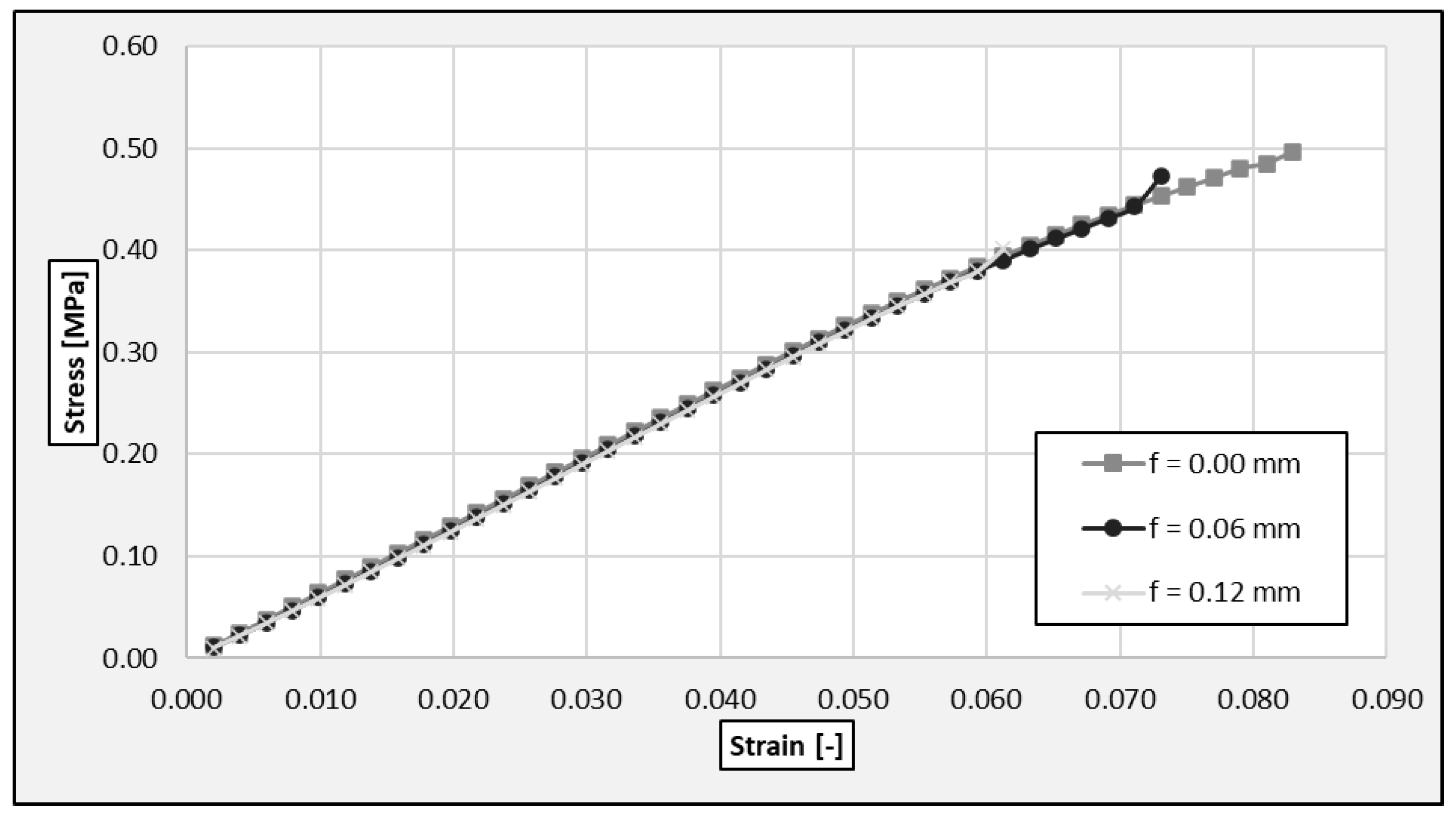
4.1.7. Deflection of Fibres during the Printing Process
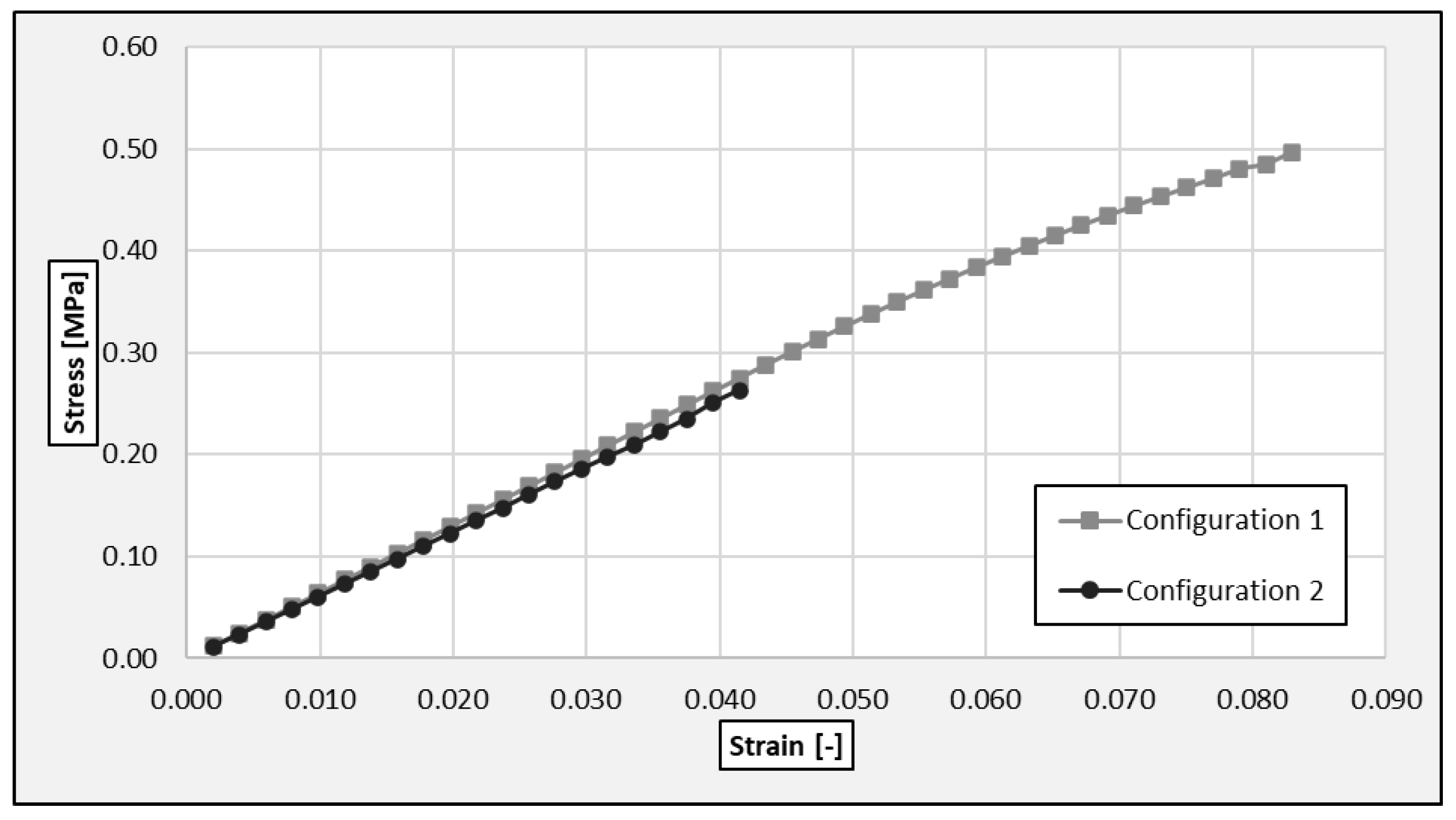
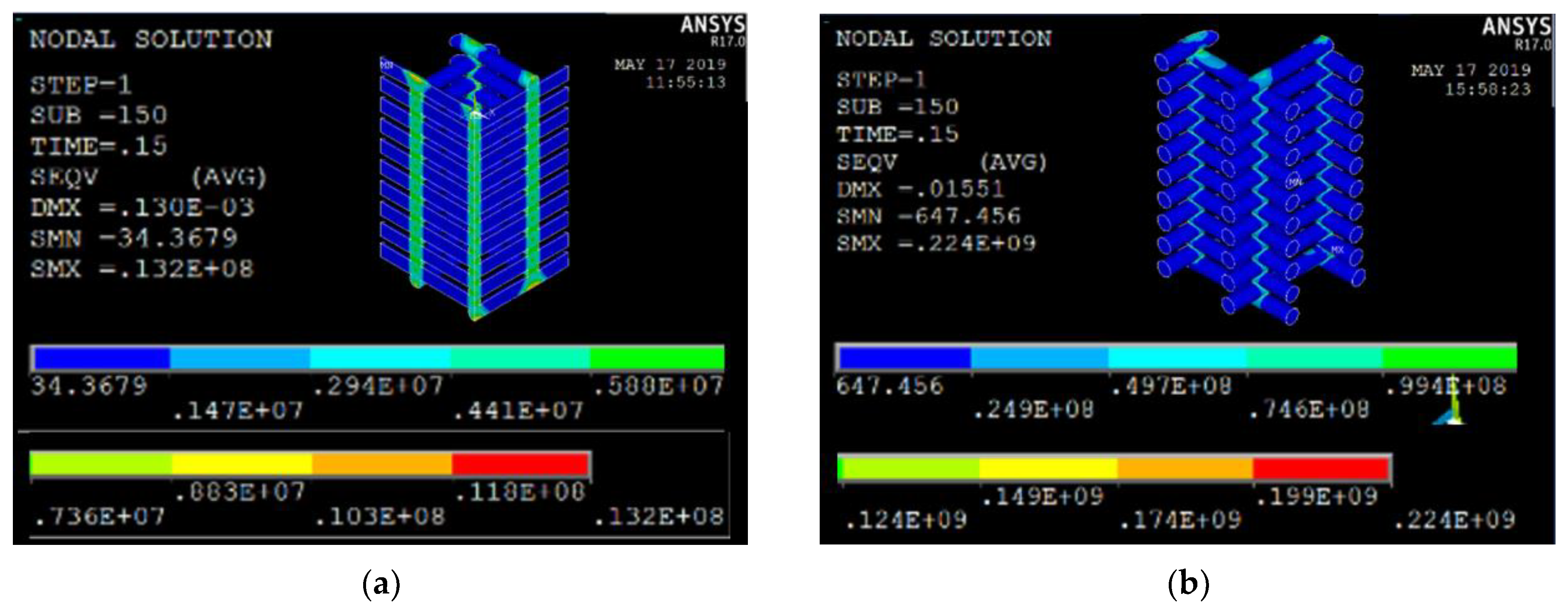
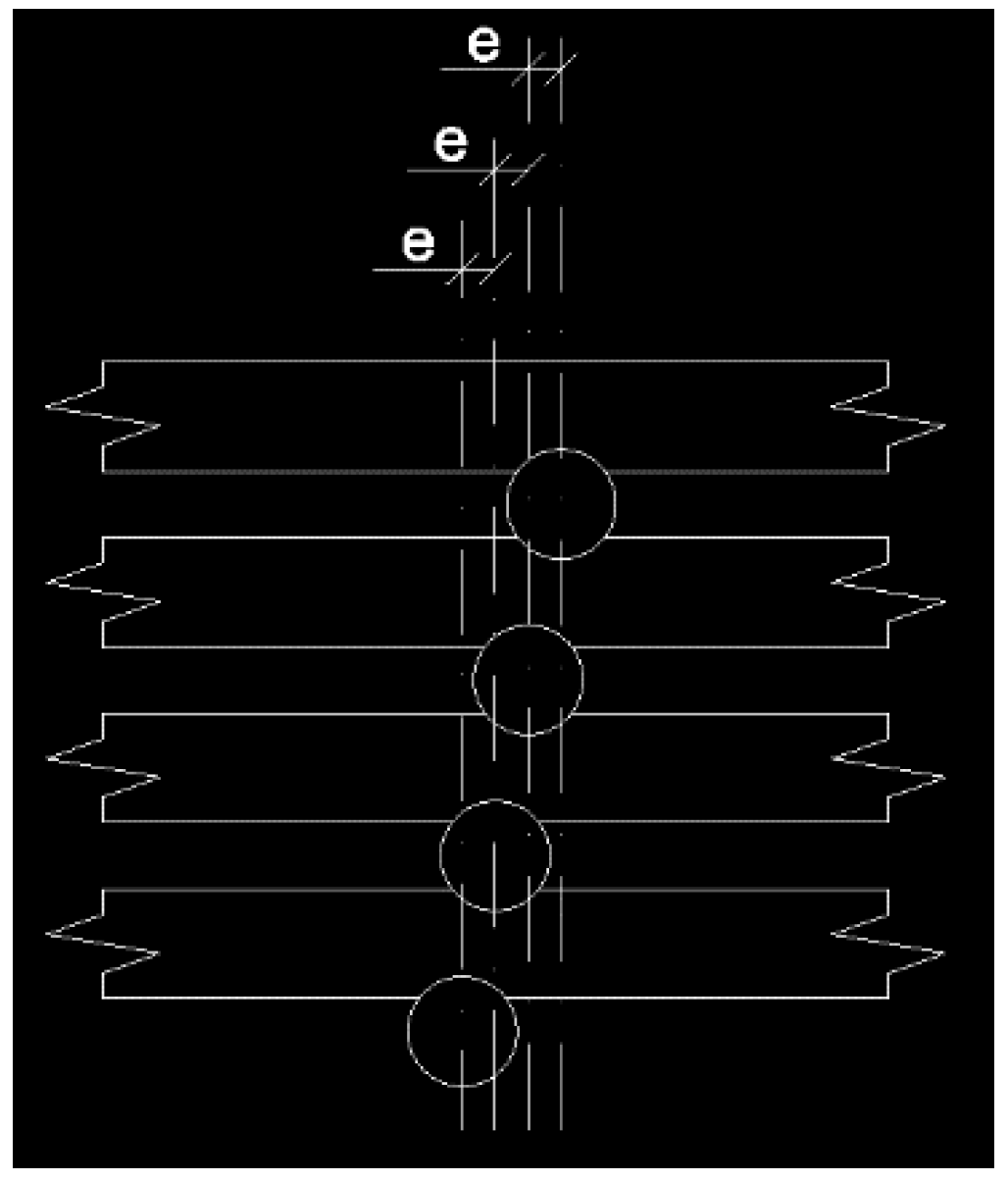
4.1.8. Straightness of the Columns Responsible for Load Transmission
- Alternate variations in the strand distance (situation one);
- Cumulative variations in the strand distance (situation two).
4.1.9. Existence of Broken Fibres
- No broken fibres within the scaffold—Situation one.
- One broken fibre within the scaffold (breakage located in one intersection between perpendicular fibres)—Situation two.
- Two broken fibres within the scaffold (breakages located in two different intersections between perpendicular fibres)—Situation three.
- One broken fibre within the scaffold (breakage located far from any intersection between perpendicular fibres)—Situation four.
- Two broken fibres within the scaffold (breakages located far from any intersection between perpendicular fibres)—Situation five.
4.2. Design Safety Factor to Consider Uncertainty
4.2.1. Derivation of the Global Mean
4.2.2. Derivation of the Global Standard Deviation
4.2.3. Derivation of the Safety Factor
4.2.4. Use Case
- Increasing the execution control, enabling to reduce the factor γMP;
- Improving the material, pushing forward the stress limits and the global stiffness;
- Increasing the fibre diameter and/or reducing the strand distance, thus increasing the column area.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stevens, M.M. Biomaterials for Bone Tissue Engineering. Mater. Today 2008, 11, 18–25. [Google Scholar] [CrossRef]
- Fernandez-Yague, M.A.; Abbah, S.A.; McNamara, L.; Zeugolis, D.I.; Pandit, A.; Biggs, M.J. Biomimetic Approaches in Bone Tissue Engineering: Integrating Biological and Physicomechanical Strategies. Adv. Drug Deliv. Rev. 2015, 84, 1–29. [Google Scholar] [CrossRef]
- Rezwan, K.; Chen, Q.Z.; Blaker, J.J.; Boccaccini, A.R. Biodegradable and Bioactive Porous Polymer/Inorganic Composite Scaffolds for Bone Tissue Engineering. Biomaterials 2006, 27, 3413–3431. [Google Scholar] [CrossRef]
- Jakus, A.E.; Rutz, A.L.; Jordan, S.W.; Kannan, A.; Mitchell, S.M.; Yun, C.; Koube, K.D.; Yoo, S.C.; Whiteley, H.E.; Richter, C.-P.; et al. Hyperelastic “Bone”: A Highly Versatile, Growth Factor–Free, Osteoregenerative, Scalable, and Surgically Friendly Biomaterial. Sci. Transl. Med. 2016, 8, 358ra127. [Google Scholar] [CrossRef] [Green Version]
- Karageorgiou, V.; Kaplan, D. Porosity of 3D Biomaterial Scaffolds and Osteogenesis. Biomaterials 2005, 26, 5474–5491. [Google Scholar] [CrossRef]
- Hutmacher, D.W. Scaffolds in Tissue Engineering Bone and Cartilage. Biomaterials 2000, 21, 2529–2543. [Google Scholar] [CrossRef]
- Lee, W.C.; Lim, C.H.Y.X.; Shi, H.; Tang, L.A.L.; Wang, Y.; Lim, C.T.; Loh, K.P. Origin of Enhanced Stem Cell Growth and Differentiation on Graphene and Graphene Oxide. ACS Nano 2011, 5, 7334–7341. [Google Scholar] [CrossRef] [PubMed]
- Chung, C.; Kim, Y.-K.; Shin, D.; Ryoo, S.-R.; Hong, B.H.; Min, D.-H. Biomedical Applications of Graphene and Graphene Oxide. Acc. Chem. Res. 2013, 46, 2211–2224. [Google Scholar] [CrossRef] [PubMed]
- Raucci, M.G.; Giugliano, D.; Longo, A.; Zeppetelli, S.; Carotenuto, G.; Ambrosio, L. Comparative Facile Methods for Preparing Graphene Oxide-Hydroxyapatite for Bone Tissue Engineering. J. Tissue Eng. Regen. Med. 2017, 11, 2204–2216. [Google Scholar] [CrossRef]
- Badar, M.; Rahim, M.I.; Kieke, M.; Ebel, T.; Rohde, M.; Hauser, H.; Behrens, P.; Mueller, P.P. Controlled Drug Release from Antibiotic-Loaded Layered Double Hydroxide Coatings on Porous Titanium Implants in a Mouse Model. J. Biomed. Mater. Res. A 2015, 103, 2141–2149. [Google Scholar] [CrossRef] [PubMed]
- Ai, J.; Chen, Y.; Jing, H.; Gao, X.; Liu, J.; Ma, K.; Suo, J.; Yu, S.; Song, S. Dynamic Release of Antibiotic Drug Gentamicin Sulfate from Novel Zirconium Phosphate Nano-Platelets. Sci. Adv. Mater. 2014, 6, 2603–2610. [Google Scholar] [CrossRef]
- Rodriguez-Losada, N.; Wendelbo, R.; Garcia-Fernandez, M.; Pavia, J.; Martinez-Montañez, E.; Lara-Muñoz, J.P.; Arenas, E.; Aguirre-Gomez, J.A. Graphene Derivative Scaffolds Facilitate in Vitro Cell Survival and Maturation of Dopaminergic SN4741 Cells. Acta Physiol. 2014, 212, 69. [Google Scholar] [CrossRef] [Green Version]
- Fiorillo, M.; Verre, A.F.; Iliut, M.; Peiris-Pagés, M.; Ozsvari, B.; Gandara, R.; Cappello, A.R.; Sotgia, F.; Vijayaraghavan, A.; Lisanti, M.P. Graphene Oxide Selectively Targets Cancer Stem Cells, across Multiple Tumor Types: Implications for Non-Toxic Cancer Treatment, via “Differentiation-Based Nano-Therapy”. Oncotarget 2015, 6, 3553–3562. [Google Scholar] [CrossRef] [Green Version]
- Butscher, A.; Bohner, M.; Roth, C.; Ernstberger, A.; Heuberger, R.; Doebelin, N.; von Rohr, P.R.; Müller, R. Printability of Calcium Phosphate Powders for Three-Dimensional Printing of Tissue Engineering Scaffolds. Acta Biomater. 2012, 8, 373–385. [Google Scholar] [CrossRef]
- Butscher, A.; Bohner, M.; Hofmann, S.; Gauckler, L.; Müller, R. Structural and Material Approaches to Bone Tissue Engineering in Powder-Based Three-Dimensional Printing. Acta Biomater. 2011, 7, 907–920. [Google Scholar] [CrossRef] [PubMed]
- Moroni, L.; de Wijn, J.R.; van Blitterswijk, C.A. 3D Fiber-Deposited Scaffolds for Tissue Engineering: Influence of Pores Geometry and Architecture on Dynamic Mechanical Properties. Biomaterials 2006, 27, 974–985. [Google Scholar] [CrossRef]
- Woodfield, T.B.F.; Malda, J.; de Wijn, J.; Péters, F.; Riesle, J.; van Blitterswijk, C.A. Design of Porous Scaffolds for Cartilage Tissue Engineering Using a Three-Dimensional Fiber-Deposition Technique. Biomaterials 2004, 25, 4149–4161. [Google Scholar] [CrossRef] [PubMed]
- Tjong, S.C. Structural and Mechanical Properties of Polymer Nanocomposites. Mater. Sci. Eng. R Rep. 2006, 53, 73–197. [Google Scholar] [CrossRef]
- Paul, D.R.; Robeson, L.M. Polymer Nanotechnology: Nanocomposites. Polymer 2008, 49, 3187–3204. [Google Scholar] [CrossRef] [Green Version]
- Schieker, M.; Seitz, H.; Drosse, I.; Seitz, S.; Mutschler, W. Biomaterials as Scaffold for Bone Tissue Engineering. Eur. J. Trauma 2006, 32, 114–124. [Google Scholar] [CrossRef]
- Pavlidou, S.; Papaspyrides, C.D. A Review on Polymer–Layered Silicate Nanocomposites. Prog. Polym. Sci. 2008, 33, 1119–1198. [Google Scholar] [CrossRef]
- Alexandre, M.; Dubois, P. Polymer-Layered Silicate Nanocomposites: Preparation, Properties and Uses of a New Class of Materials. Mater. Sci. Eng. R Rep. 2000, 28, 1–63. [Google Scholar] [CrossRef]
- Potts, J.R.; Dreyer, D.R.; Bielawski, C.W.; Ruoff, R.S. Graphene-Based Polymer Nanocomposites. Polymer 2011, 52, 5–25. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; de Wijn, J.R.; van Blitterswijk, C.A. Composite Biomaterials with Chemical Bonding between Hydroxyapatite Filler Particles and PEG/PBT Copolymer Matrix. J. Biomed. Mater. Res. 1998, 40, 490–497. [Google Scholar] [CrossRef]
- Liu, Q.; de Wijn, J.R.; de Groot, K.; van Blitterswijk, C.A. Surface Modification of Nano-Apatite by Grafting Organic Polymer. Biomaterials 1998, 19, 1067–1072. [Google Scholar] [CrossRef]
- Liu, Q.; de Wijn, J.R.; van Blitterswijk, C.A. Nano-Apatite/Polymer Composites: Mechanical and Physicochemical Characteristics. Biomaterials 1997, 18, 1263–1270. [Google Scholar] [CrossRef] [Green Version]
- Liu, O.; Du Wijn, J.R.; Van Blitterswijk, C.A. Intermolecular complexation between peg/pbt block copolymer and polyelectrolytes polyacrylic acid and maleic acid copolymer. Eur. Polym. J. 1997, 33, 1041–1047. [Google Scholar] [CrossRef]
- Liu, Q.; De Wijn, J.R.; Bakker, D.; Van Blitterswijk, C.A. Surface Modification of Hydroxyapatite to Introduce Interfacial Bonding with PolyactiveTM 70/30 in a Biodegradable Composite. J. Mater. Sci. Mater. Med. 1996, 7, 551–557. [Google Scholar] [CrossRef]
- Munarin, F.; Petrini, P.; Gentilini, R.; Pillai, R.S.; Dirè, S.; Tanzi, M.C.; Sglavo, V.M. Micro- and Nano-Hydroxyapatite as Active Reinforcement for Soft Biocomposites. Int. J. Biol. Macromol. 2015, 72, 199–209. [Google Scholar] [CrossRef]
- Nandakumar, A.; Cruz, C.; Mentink, A.; Birgani, Z.T.; Moroni, L.; van Blitterswijk, C.; Habibovic, P. Monolithic and Assembled Polymer—Ceramic Composites for Bone Regeneration. Acta Biomater. 2013, 9, 5708–5717. [Google Scholar] [CrossRef] [PubMed]
- Fouad, H.; Elleithy, R.; Alothman, O.Y. Thermo-Mechanical, Wear and Fracture Behavior of High-Density Polyethylene/Hydroxyapatite Nano Composite for Biomedical Applications: Effect of Accelerated Ageing. J. Mater. Sci. Technol. 2013, 29, 573–581. [Google Scholar] [CrossRef]
- Sinha, R.; Cámara-Torres, M.; Scopece, P.; Falzacappa, E.V.; Patelli, A.; Moroni, L.; Mota, C. A Hybrid Additive Manufacturing Platform to Create Bulk and Surface Composition Gradients on Scaffolds for Tissue Regeneration. bioRxiv 2020, 165605. [Google Scholar] [CrossRef]
- Olivares, A.L.; Marsal, È.; Planell, J.A.; Lacroix, D. Finite Element Study of Scaffold Architecture Design and Culture Conditions for Tissue Engineering. Biomaterials 2009, 30, 6142–6149. [Google Scholar] [CrossRef]
- Miranda, P.; Pajares, A.; Guiberteau, F. Finite Element Modeling as a Tool for Predicting the Fracture Behavior of Robocast Scaffolds. Acta Biomater. 2008, 4, 1715–1724. [Google Scholar] [CrossRef]
- Sandino, C.; Planell, J.A.; Lacroix, D. A Finite Element Study of Mechanical Stimuli in Scaffolds for Bone Tissue Engineering. J. Biomech. 2008, 41, 1005–1014. [Google Scholar] [CrossRef] [PubMed]
- Milan, J.-L.; Planell, J.A.; Lacroix, D. Computational Modelling of the Mechanical Environment of Osteogenesis within a Polylactic Acid–Calcium Phosphate Glass Scaffold. Biomaterials 2009, 30, 4219–4226. [Google Scholar] [CrossRef] [Green Version]
- Almeida, H.A. Design of Tissue Engineering Scaffolds Based on Hyperbolic Surfaces: Structural Numerical Evaluation. Med. Eng. 2014, 8, 1033–1040. [Google Scholar] [CrossRef] [PubMed]
- Dinis, J.C.; Morais, T.F.; Amorim, P.H.J.; Ruben, R.B.; Almeida, H.A.; Inforçati, P.N.; Bártolo, P.J.; Silva, J.V.L. Open Source Software for the Automatic Design of Scaffold Structures for Tissue Engineering Applications. Procedia Technol. 2014, 16, 1542–1547. [Google Scholar] [CrossRef]
- De Amorim Almeida, H.; da Silva Bártolo, P.J. Virtual Topological Optimisation of Scaffolds for Rapid Prototyping. Med. Eng. Phys. 2010, 32, 775–782. [Google Scholar] [CrossRef]
- Cámara-Torres, M.; Duarte, S.; Sinha, R.; Egizabal, A.; Álvarez, N.; Bastianini, M.; Sisani, M.; Scopece, P.; Scatto, M.; Bonetto, A.; et al. 3D Additive Manufactured Composite Scaffolds with Antibiotic-Loaded Lamellar Fillers for Bone Infection Prevention and Tissue Regeneration. Bioact. Mater. 2021, 6, 1073–1082. [Google Scholar] [CrossRef]
- Bastianini, M.; Scatto, M.; Sisani, M.; Scopece, P.; Patelli, A.; Petracci, A. Innovative Composites Based on Organic Modified Zirconium Phosphate and PEOT/PBT Copolymer. J. Compos. Sci. 2018, 2, 31. [Google Scholar] [CrossRef] [Green Version]
- F04 Committee. ASTM F2027-08, Standard Guide for Characterization and Testing of Raw or Starting Biomaterials for Tissue-Engineered Medical Products; ASTM International: West Conshohocken, PA, USA, 2008. [Google Scholar]
- D20 Committee. ASTM D638-08, Standard Test Method for Tensile Properties of Plastics; ASTM International: West Conshohocken, PA, USA, 2008. [Google Scholar]
- D20 Committee. ASTM D695-10, Standard Test Method for Compressive Properties of Rigid Plastics; ASTM International: West Conshohocken, PA, USA, 2010. [Google Scholar]
- Technical Committee: ISO/TC 61/SC 2 Mechanical Behavior. ISO 527-1:2019 Plastics—Determination of Tensile Properties—Part 1: General Principles; IOS: Geneva, Switzerland, 2019; p. 26. [Google Scholar]
- Technical Committee: ISO/TC 61/SC 2 Mechanical Behavior. ISO 527-2:2012 Plastics—Determination of Tensile Properties—Part 2: Test Conditions for Moulding and Extrusion Plastics; IOS: Geneva, Switzerland, 2012; p. 11. [Google Scholar]
- Technical Committee: ISO/TC 61/SC 13 Composites and Reinforcement Fibres. ISO 527-4:1997 Plastics—Determination of Tensile Properties—Part 4: Test Conditions for Isotropic and Orthotropic Fibre-Reinforced Plastic Composites; IOS: Geneva, Switzerland, 1997; p. 11. [Google Scholar]
- F04 Committee. ASTM F2150-02e1, Standard Guide for Characterization and Testing of Biomaterial Scaffolds Used in Tissue-Engineered Medical Products; ASTM International: West Conshohocken, PA, USA, 2002. [Google Scholar]
- Technical Committee: ISO/TC 61/SC 2 Mechanical Behavior. ISO 604:2002 Plastics—Determination of Compressive Properties; IOS: Geneva, Switzerland, 2002; p. 18. [Google Scholar]
- Calderón-Uríszar-Aldaca, I.; Biezma, M.V.; Matanza, A.; Briz, E.; Bastidas, D.M. Second-Order Fatigue of Intrinsic Mean Stress under Random Loadings. Int. J. Fatigue 2020, 130, 105257. [Google Scholar] [CrossRef]
- Calderon-Uriszar-Aldaca, I.; Briz, E.; Biezma, M.V.; Puente, I. A Plain Linear Rule for Fatigue Analysis under Natural Loading Considering the Coupled Fatigue and Corrosion Effect. Int. J. Fatigue 2019, 122, 141–151. [Google Scholar] [CrossRef]
- Calderon-Uriszar-Aldaca, I.; Biezma, M.V. A Plain Linear Rule for Fatigue Analysis under Natural Loading Considering the Sequence Effect. Int. J. Fatigue 2017, 103, 386–394. [Google Scholar] [CrossRef] [Green Version]




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scaffold Type | Fibre Diameter (mm) | Strand Distance (mm) | Layer Height (mm) | Scaffold Diameter (mm)] | Scaffold Height (mm) |
|---|---|---|---|---|---|
| G25_nanoHA 1.25 | 0.25 | 1.25 | 0.20 | 4.00 | 4.05 |
| G25_nanoHA_1.00 | 0.25 | 1.00 | 0.20 | 4.00 | 4.05 |
| G25_nanoHA_0.75 | 0.25 | 0.75 | 0.20 | 4.00 | 4.05 |
| Sample | Young Modulus (MPa) | Yield Strength (MPa) | Elongation at Yield (%) |
|---|---|---|---|
| G25_nanoHA 1.25_1 | 2.33 | 0.25 | 9.80 |
| G25_nanoHA 1.25_2 | 1.86 | 0.25 | 12.20 |
| G25_nanoHA 1.25_3 | 2.56 | 0.29 | 11.60 |
| G25_nanoHA_1.25 (Mean) | 2.25 | 0.26 | 11.20 |
| G25_nanoHA_1.25 (SD) | 0.36 | 0.02 | 1.25 |
| G25_nanoHA_1.00_1 | 5.54 | 0.42 | 10.90 |
| G25_nanoHA_1.00_2 | 3.98 | 0.52 | 16.00 |
| G25_nanoHA_1.00_3 | 5.88 | 0.50 | 13.50 |
| G25_nanoHA_1.00 (Mean) | 5.13 | 0.48 | 13.47 |
| G25_nanoHA_1.00 (SD) | 1.01 | 0.05 | 2.55 |
| G25_nanoHA_0.75_1 | 6.93 | 0.78 | 15.90 |
| G25_nanoHA_0.75_2 | 6.17 | 0.80 | 16.90 |
| G25_nanoHA_0.75_3 | 5.90 | 0.79 | 16.40 |
| G25_nanoHA_0.75 (Mean) | 6.33 | 0.79 | 16.40 |
| G25_nanoHA_0.75 (SD) | 0.53 | 0.01 | 0.50 |
| Scaffold | G25 nanoHA 1.25 | G25 nanoHA 1.00 | G25 nanoHA 0.75 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Model | Mean | SD | Model | Mean | SD | Model | Mean | SD | ||
| Young’s Modulus | (MPa) | 6.60 | 2.25 | 0.36 | 7.90 | 5.13 | 1.01 | 15.49 | 6.33 | 0.53 |
| Source | Base | Variation 1 | Variation 2 |
|---|---|---|---|
| Poisson’s Ratio | 0.4 | 0.375 | 0.35 |
| Position of fibres | At plane of sym. | Out plane of sym. | - |
| Fibre diameter (mm) | 0.25 | 0.235 | 0.22 |
| Strand distance (mm) | 1.25 | 1.2 | 1.3 |
| Layer height (mm) | 0.2 | 0.215 | 0.23 |
| Sample diameter (mm) | 4 | 3.9 | 4.1 |
| Deflection of fibres (mm) | 0 | 0.06 | 0.12 |
| Straightness of columns | Straight | Alternated | Cumulated |
| Existence of broken fibres | No broken fibres | breakage at crossing | far from crossing |
| Poisson’s Ratio (-) | Elastic Modulus (MPa) |
|---|---|
| 0.400 | 6.60 |
| 0.375 | 6.57 |
| 0.350 | 6.54 |
| Poisson’s Ratio (-) | Elastic Modulus (MPa) |
|---|---|
| 0.400 | 6.60 |
| 0.375 | 6.26 |
| Fibre Diameter (mm) | Elastic Modulus (MPa) |
|---|---|
| 0.250 | 6.60 |
| 0.235 | 5.08 |
| 0.220 | 3.39 |
| Strand Distance (mm) | Elastic Modulus (MPa) |
|---|---|
| 1.20 | 6.61 |
| 1.25 | 6.60 |
| 1.30 | 6.58 |
| Layer Height (mm) | Elastic Modulus (MPa) |
|---|---|
| 0.200 | 6.60 |
| 0.215 | 5.53 |
| 0.230 | 4.07 |
| Sample Diameter (mm) | Elastic Modulus (MPa) |
|---|---|
| 3.90 | 6.61 |
| 4.00 | 6.60 |
| 4.10 | 6.62 |
| Deflection of the Printed Fibres (mm) | Elastic Modulus (MPa) |
|---|---|
| 0.00 | 6.60 |
| 0.06 | 6.45 |
| 0.12 | 6.41 |
| Deviation (mm) | Elastic Modulus (MPa) |
|---|---|
| 0.000 | 6.70 |
| 0.025 | 5.76 |
| 0.050 | 3.99 |
| Deviation (mm) | Elastic Modulus (MPa) |
|---|---|
| 0.000 | 6.70 |
| 0.005 | 6.69 |
| 0.009 | 6.67 |
| Situation (#) | Elastic Modulus (MPa) |
|---|---|
| Situation 1 | 6.70 |
| Situation 2 | 6.57 |
| Situation 3 | 6.43 |
| Situation 4 | 6.70 |
| Situation 5 | 6.70 |
| Variable (xi) | Source (-) | Fi,min (#) | Fi,max (#) | μi (#) | σi (#) |
|---|---|---|---|---|---|
| x1 | Poisson’s Ratio | 0.9909 | 1.0000 | 0.9955 | 0.0028 |
| x2 | Position of the fibres | 0.9485 | 1.0000 | 0.9742 | 0.0157 |
| x3 | Fibre Diameter | 0.5136 | 1.0000 | 0.7568 | 0.1478 |
| x4 | Strand Distance | 0.9955 | 1.0000 | 0.9977 | 0.0014 |
| x5 | Layer Height | 0.6167 | 1.0000 | 0.8083 | 0.1165 |
| x6 | Sample Diameter | 0.9545 | 1.0530 | 1.0038 | 0.0299 |
| x7 | Deflection of the fibres | 0.9712 | 1.0000 | 0.9856 | 0.0088 |
| x8 | Straightness of the columns | 0.5955 | 1.0000 | 0.7978 | 0.1230 |
| x9 | Existence of broken fibres | 0.9597 | 1.0000 | 0.9799 | 0.0122 |
| EA,FEM | Em,d | εm | δ | EFEM | σFEM | |
|---|---|---|---|---|---|---|
| (MPa) | (MPa) | (-) | (mm) | (MPa) | (MPa) | |
| G25 nanoHA 1.25 | 6.6 | 6.6 | 0.059 | 1.182 | 566.2 | 33.4 |
| G25 nanoHA 1.00 | 7.9 | 7.9 | 0.049 | 0.987 | 730.7 | 36.1 |
| G25 nanoHA 0.75 | 15.49 | 15.5 | 0.025 | 0.503 | 563.1 | 14.2 |
| EA,FEM | Em,d | εm | δ | EFEM | σFEM | |
|---|---|---|---|---|---|---|
| (MPa) | (MPa) | (-) | (mm) | (MPa) | (MPa) | |
| G25 nanoHA 1.25 | 6.6 | 3.0 | 0.130 | 2.600 | 566.2 | 73.6 |
| G25 nanoHA 1.00 | 7.9 | 3.6 | 0.109 | 2.172 | 730.7 | 79.3 |
| G25 nanoHA 0.75 | 15.49 | 7.0 | 0.055 | 1.108 | 563.1 | 31.2 |
| EA,FEM | Ek,d | εk | δ | EFEM | σFEM | |
|---|---|---|---|---|---|---|
| (MPa) | (MPa) | (-) | (mm) | (MPa) | (MPa) | |
| G25 nanoHA 1.25 | 6.6 | 1.6 | 0.251 | 5.022 | 566.2 | 142.2 |
| G25 nanoHA 1.00 | 7.9 | 1.9 | 0.210 | 4.195 | 730.7 | 153.3 |
| G25 nanoHA 0.75 | 15.49 | 3.6 | 0.107 | 2.140 | 563.1 | 60.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Calderon-Uriszar-Aldaca, I.; Perez, S.; Sinha, R.; Camara-Torres, M.; Villanueva, S.; Mota, C.; Patelli, A.; Matanza, A.; Moroni, L.; Sanchez, A. Size Effects in Finite Element Modelling of 3D Printed Bone Scaffolds Using Hydroxyapatite PEOT/PBT Composites. Mathematics 2021, 9, 1746. https://doi.org/10.3390/math9151746
Calderon-Uriszar-Aldaca I, Perez S, Sinha R, Camara-Torres M, Villanueva S, Mota C, Patelli A, Matanza A, Moroni L, Sanchez A. Size Effects in Finite Element Modelling of 3D Printed Bone Scaffolds Using Hydroxyapatite PEOT/PBT Composites. Mathematics. 2021; 9(15):1746. https://doi.org/10.3390/math9151746
Chicago/Turabian StyleCalderon-Uriszar-Aldaca, Iñigo, Sergio Perez, Ravi Sinha, Maria Camara-Torres, Sara Villanueva, Carlos Mota, Alessandro Patelli, Amaia Matanza, Lorenzo Moroni, and Alberto Sanchez. 2021. "Size Effects in Finite Element Modelling of 3D Printed Bone Scaffolds Using Hydroxyapatite PEOT/PBT Composites" Mathematics 9, no. 15: 1746. https://doi.org/10.3390/math9151746
APA StyleCalderon-Uriszar-Aldaca, I., Perez, S., Sinha, R., Camara-Torres, M., Villanueva, S., Mota, C., Patelli, A., Matanza, A., Moroni, L., & Sanchez, A. (2021). Size Effects in Finite Element Modelling of 3D Printed Bone Scaffolds Using Hydroxyapatite PEOT/PBT Composites. Mathematics, 9(15), 1746. https://doi.org/10.3390/math9151746