1. Introduction
Uncertainties such as nonmeasurable disturbances or unavoidable simplifications in plant modelling justify feedback control loops, which, by permanently supervising the output, can correct its deviation from the reference or track reference changes. Better performances of the output response are linked to larger control bandwidths, which are provided by larger gains of feedback controllers (magnitude frequency response). Limited actuator ranges usually constrain the bandwidth and performance. Even for unlimited linear ranges or very powerful actuators, sensor noise amplifications at the control inputs impose an important constraint to the bandwidth to avoid fatigue or even saturation of actuators (Horowitz [
1] labelled this fact as ‘the cost of feedback’). With this in mind, Quantitative Feedback Theory (QFT) [
1,
2,
3] proposes incorporating feedforward controllers when external inputs are available (reference or measurable disturbance inputs [
4]), reducing feedback gain to only that strictly necessary to compensate for the uncertainties. However, reduction of the feedback gain increases the feedforward gain to maintain a specific performance that is linked with the chosen closed-loop bandwidth. Then, the control action is univocally conditioned by the plant frequency response and the desired performance, but its convenient allocation between feedback and feedforward control actions can prevent excessive sensor noise amplification linked with feedback gain. These facts, which are common knowledge in single-input control, have not yet been fully exploited in multi-input control.
The use of multiple control inputs can undoubtedly improve closed-loop performance. A great variety of control structures and design methods are available in the scientific literature. Some works focused on widening the range of operating points for the output [
5,
6]. Other works focused on improving the output dynamic performance and simultaneously searched for a profitable combination of control inputs, branding them as input (valve) position control, mid-ranging control [
7], or input resetting control [
8]—their foundation [
9] has inspired a set of works in the robust framework of QFT with the named missions of feedback and feedforward [
10,
11,
12,
13]. Thus, the robustly designed control elements determine the intervention or inhibition of plants (one for each input) along the frequency band. Let us consider the following facts: (i) some plants could provide the performance using less control action than others, p.e., those plants of larger magnitude, considering that magnitude dominance can change over the frequency band; (ii) plants that do not significantly contribute to the performance at certain frequencies are advised to be inhibited; (iii) the collaboration of productive plants can reduce the control action that is needed at their inputs—the virtual total control effort is divided among them. The frequency inhibition of unproductive plants is relevant for several reasons. It prevents high-frequency signals from exciting the actuators of plants that are useless at high frequencies [
10]. Similarly, it also avoids inconvenient steady-state displacements of the operating point of plants that are useless at low frequencies [
11]; applied works such as [
14,
15] highlight the relevance of resetting the steady-state points of high-frequency intervention plants. Finally, stability issues become critical when plants are out of phase, despite the fact that their magnitude contribution may be large and nearly the same [
16,
17]; Reference [
12] presented an appropriate intervention of the magnitude frequency response of plants that were not minimum phase.
Structures with exclusive feedback controllers to the control inputs are the only possibility for rejection at the output of nonmeasurable disturbances. In [
10,
11], robust design methods of the feedback controllers distributed the frequency band among the most favourable plants to minimise the control action at each input (any number of inputs were possible) while achieving the desired performance of the output response. The control architecture of [
10] allowed the collaboration of plants over the same frequency band while the architecture of [
11] required separated work-bands in favour of an easier design method; unstable, nonminimum phase, or delayed plants were investigated in [
12].
The reference tracking problem admits feedforward elements that can reduce the gain of feedback controllers to palliate noise amplification at control inputs [
13]. Beyond that, the priority of the method in [
13] was achieving correct distribution of the bandwidth among the inputs (plants) to obtain the performance using the minimum possible control action at each input.
The fact that disturbances are sometimes measurable variables opens the possibility of connecting feedforward paths to the control inputs, which can be exploited by this work. A control architecture with feedback and feedforward elements will be presented for robust disturbance rejection. The method will distribute the frequency band among the most favourable inputs (those that demand less control action). Finally, a robust design of the control elements will guarantee the prescribed performance and stability for a set of possible plant models. Feedforward will reduce feedback, reporting important benefits with regard to excessive sensor noise amplification at the control inputs that could saturate actuators and spoil the expected performance in feedback-only control structures. Whenever external disturbances are measurable, the contribution of this work can be of importance in a great variety of fields where multi-input control has been successfully applied. Remarkable application fields include bioprocesses [
14,
15], thermal systems [
18], medical systems [
19,
20], scanner imaging [
21,
22], massive data storage devices [
23,
24], fuel engines [
25] and electrical vehicles [
26], robotics [
27,
28,
29], and unmanned aerial vehicles [
30].
2. Control Architecture and Robust Design Method
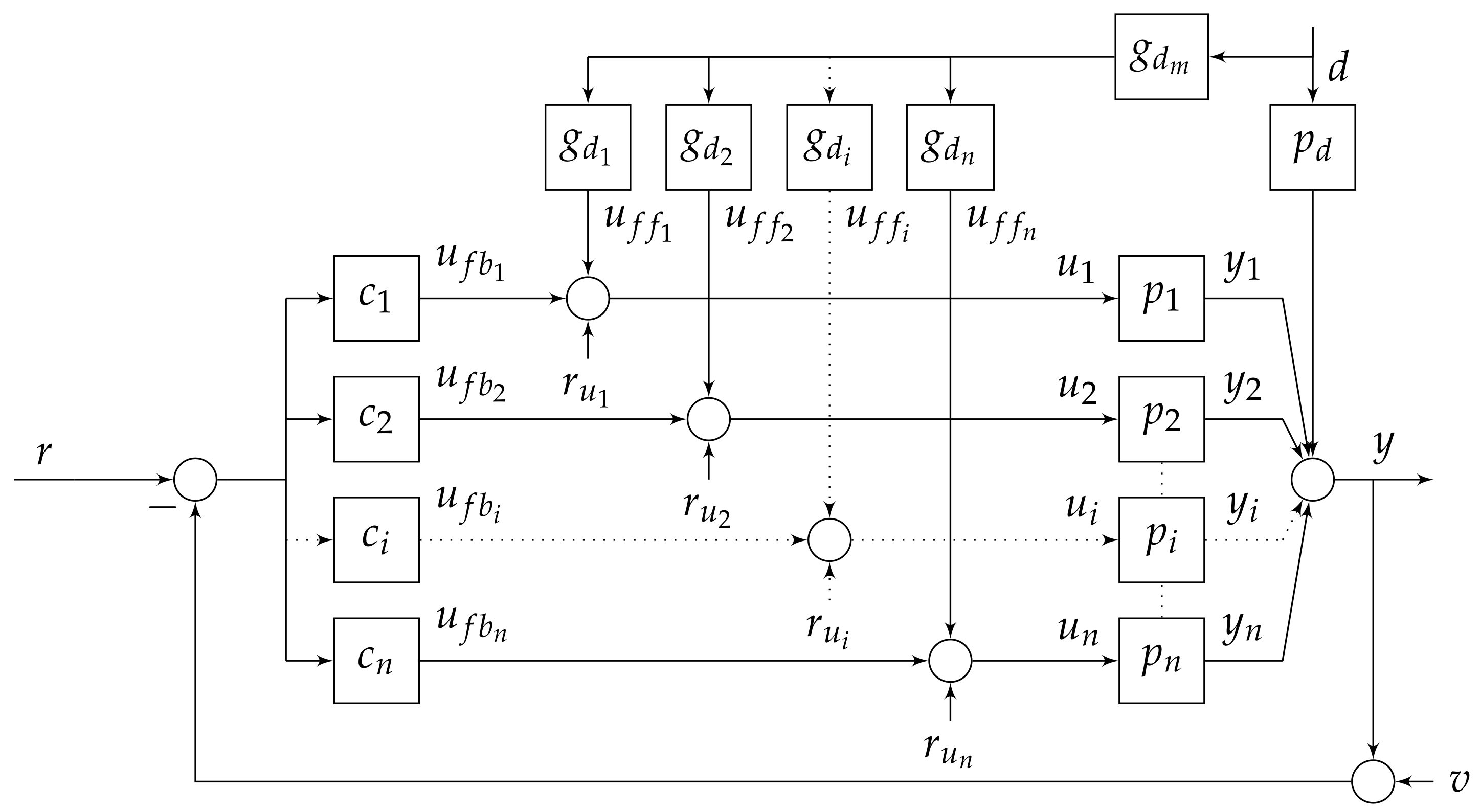
Figure 1 depicts the multiple-input single-output (MISO) system and the proposed control architecture. The
y output deviation is modelled by the influence of
control inputs and a
d disturbance input, achieving a vector of
transfer functions (plants)
. Let us consider a total number
z of uncertain parameters in these dynamical models. By defining
as a vector of those uncertain parameters in a set of all possible values of
in
, the MISO uncertain system can be formally defined as
Henceforth, labels or denote plant models of delimited uncertainty.
An appropriate control must compensate for the output deviation from the constant reference,
, when a
d disturbance occurs; reference tracking problems were discussed in [
13]. Measurable disturbances are considered in the new design method. In such a case, the robust control specification is posed in the frequency domain as
where
is an upper tolerance on the set of
frequency responses.
As demonstrated in [
10], when
d is nonmeasurable (i.e.,
, the parallel structure of feedback controllers
allows any distribution of frequencies for
participation to fulfil
. Several
plants could even collaborate over the same frequencies to reduce each
. On the other hand, a series structure of feedback controllers [
11] obliges to a predefined location of plants inside the structure and requires separated frequency work-bands for the
inputs. In spite of this, a method was provided to sort the plants and assign a convenient frequency band to each input to use the least
possible.
Beyond those solutions, feedforward loops from the external input
d to the control inputs
are now being added. Individual elements
allow the frequency band distribution for
inputs with regard to feedforward tasks, while the feedforward master
locates the responses
e, taking advantage of the measurable information
d; as long as there is a set of possible plants (
1), there is a bunch of responses. The dispersion of frequency responses is constrained by feedback, which can be freely distributed among
by controllers
. In summary, a total feedforward
is contributed by individual feedforward channels
, which supply
, and a total feedback
is contributed by individual feedback loops
, which supply
. Both components
and
build the control action
, which, for
d handling, can be written and overbounded as
In SISO control (
), the desired performance for
univocally fixes the only control action
, which can be distributed as desired between feedback and feedforward components. QFT prioritises feedforward to reduce as much feedback as possible and its said drawbacks; [
4] provided a design solution inside a tracking error structure such as ours, which pursues the smallest
gain that guarantees the existence of
to meet (
2); in this way, the amplification of sensor noise
v at the control input
that depends on
gain is also reduced as much as possible. However, evaluating (
5), a reduction of
occurs at the expense of an increase in
, since
is unique to provide the performance, i.e., the gain of
increases.
On the other hand, a multi-input availability offers many more possibilities. Let us note that despite the distribution between
and
that was selected to achieve the performance (
2), infinite combinations of
(
4) and
(
3) could build them. The goal is to find the solution that uses the set of smaller control inputs
. The authors of [
13] provided a method for the problem of robust reference tracking (
). The key point was the more the gain of a plant, the less the need of control action to contribute to the performance, which foresaw the use of inputs towards plants with higher gains at each frequency.
In the current case, let us suppose a single input
(plant
) participates in the disturbance rejection. If plant models are perfectly known, the control action
would cancel the
d disturbance influence on the
y output. Here, the whole set of plant uncertainties is being considered in the robust design. Then, the frequency response
is a rough approximation of the less favourable
if only
participates in the
d disturbance rejection;
is the plant
of least magnitude at a particular
inside the uncertain set
; and
is the plant
of largest magnitude at
inside
.
Next, the
frequency responses of all inputs
are compared at each frequency to decide which inputs are of sufficient interest for participation; those that yield the smallest
magnitude are considered. At any frequency, the contribution of as many inputs as possible is desired, if it yields a total plant
with
significantly greater magnitude than the individuals
(let us advance that
will be designed as filters with unitary gain at the pass band). Thus, the potential collaboration of plants would reduce individual feedforward actuations
because the virtual need of total feedforward
would be significantly reduced. A two-in-two comparison of
is advised. As a rule of thumb, a difference in
magnitude greater than
dB makes the plant associated with larger
magnitude useless. When a plant cannot report benefits at a certain frequency, its disconnection is recommended to avoid useless signals reaching the actuators. A second relevant point is to check that the
phase-shift of those plants that are likely to collaborate is less than
, since the vector sum of plants in the counter-phase would reduce the total magnitude of
(
7). The disconnection of useless plans in the counter-phase is a priority for stability issues [
12].
The
comparisons decide the smallest
input at each frequency, i.e., the desired frequency band allocation among inputs. Then, the design of
and
must attain the planned distribution and, simultaneously,
,
, and
must achieve the specification (
2). The design method is described as follows: First,
are designed as filters with unitary gain over the pass-band. This yields a convenient plant
(
7) that selects the most powerful
plants at each frequency for feedforward tasks. Subsequently, feedback
must reduce the influence of
uncertainty in
deviations around zero only to the extent that a master feedforward
can further position the magnitude frequency responses inside tolerance
. The required amount of feedback
could be provided with several combinations of
, but the one according to the planned distribution will save the control action by using the most powerful plants at each frequency for feedback tasks too. The set of controllers
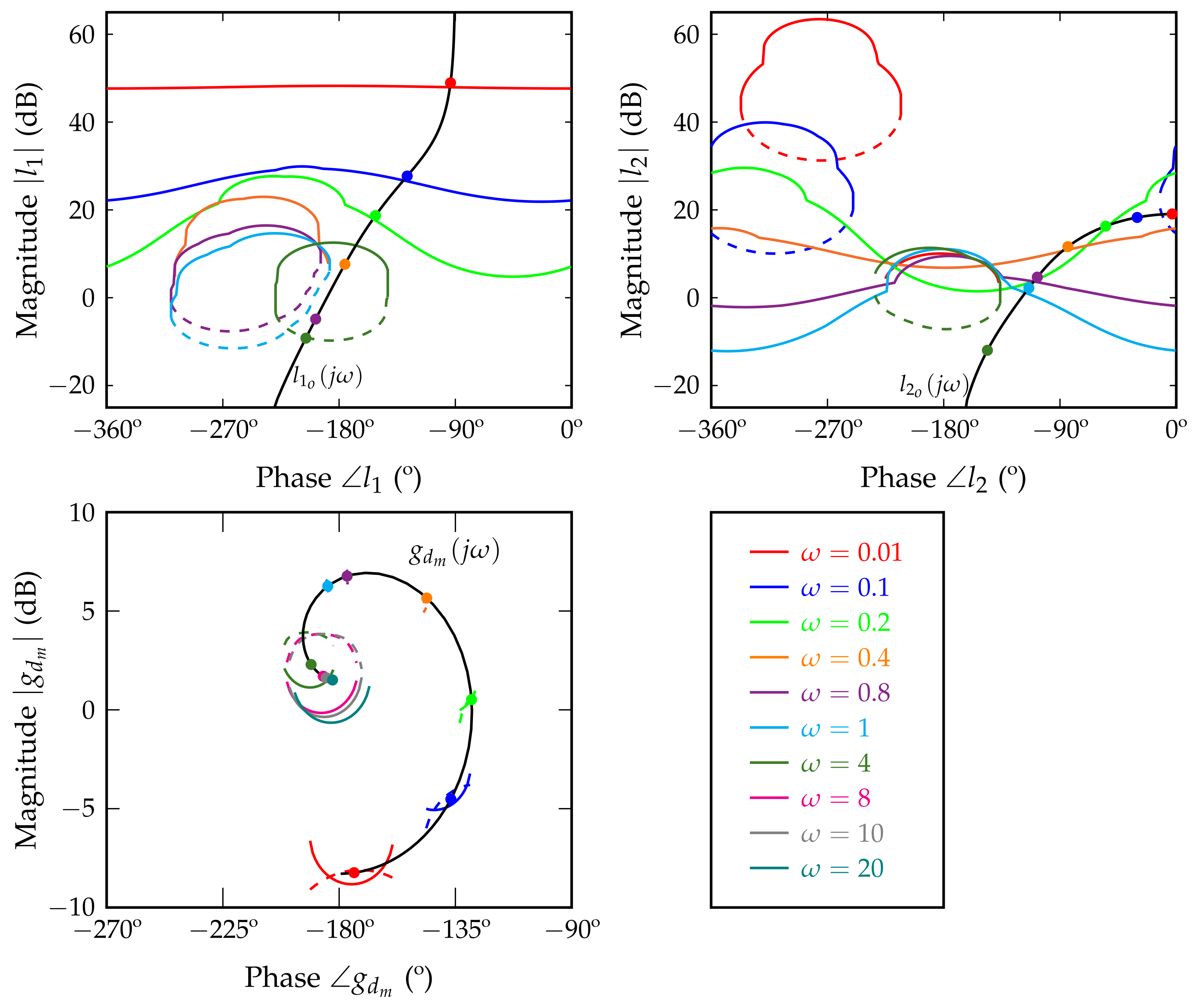
are designed via loop-shaping of
to satisfy the bounds
at a discrete set of frequencies
. The QFT bounds
translate the closed loop specification into terms of restrictions for
nominal at specific frequencies
that are conveniently selected according to the plant and specifications; the bounds are depicted on a mod-arg plot [
2,
3]. During
shaping, when it lies exactly on the bounds, it guarantees the minimum gain of the
controller to achieve the specification by the whole set of plant cases. A sequential process between the
loops is arbitrated. Thus, if at some point the controller
is to be adjusted and the other controllers
take known values in the sequence, the robust disturbance rejection specification (
2) can be rewritten as
and their representative
bounds can be computed by choosing
,
,
,
,
,
, and
in the solution given to
in [
13]; this work provided the formulation to make the design of
and
independent. After the bound computation, the essence of loop-shaping is that
reaches the necessary gain at the frequencies where the
plant must work and filters (gain below 0 dB) those frequencies where
must not work. Special attention must be paid to the frequencies where several inputs must collaborate. A detailed explanation of the global procedure is given in [
10].
The full achievement of (
2) ends with the design of the master feedforward
. The specification format can now be adapted to
of function
gndbnds in the QFT toolbox [
31]. By choosing
,
,
,
,
, and
, the regions that are permitted for
on a mod-arg plot are determined; the loop-shaping of
is conducted on these bounds.
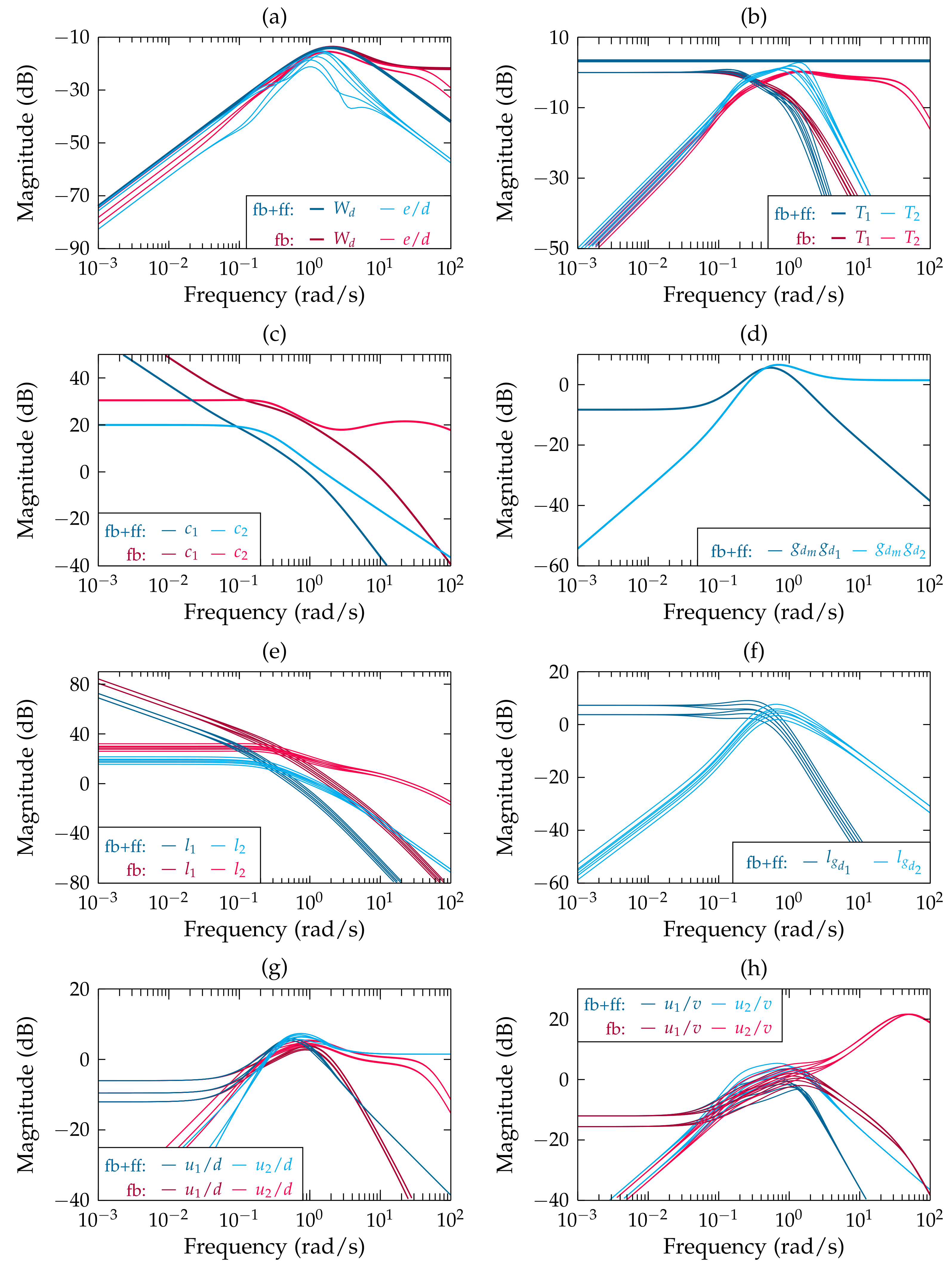
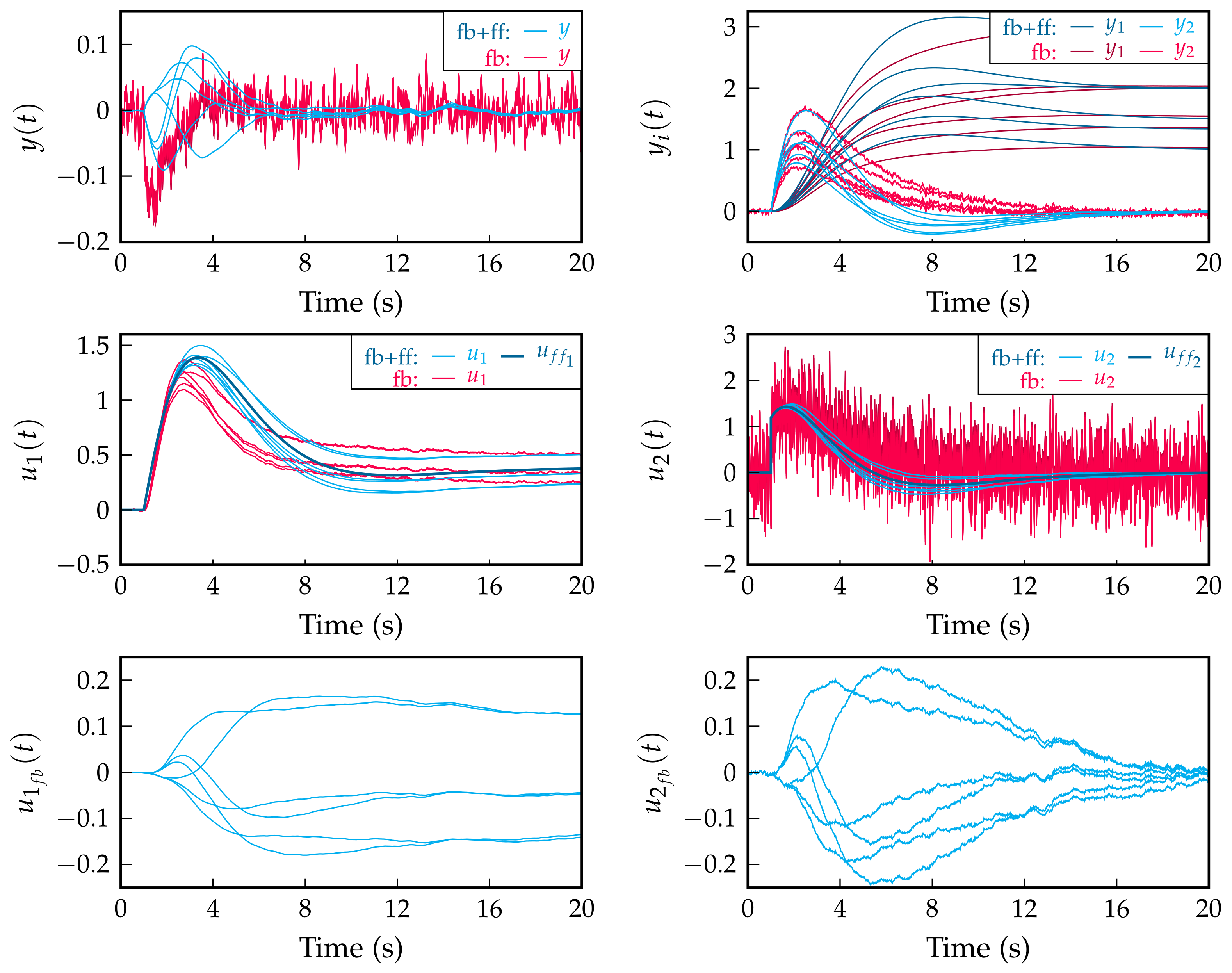
Considering the whole set of external inputs, the output error responds to
and the control inputs are
where
. Two benefits are mentioned. The availability of multiple inputs made it possible to select the intervention of the more favourable plants
at each frequency to achieve
using the minimum
. Individual feedforward
and individual feedback
either disconnected or not the commanded inputs at each frequency; integrators or derivators are recommended to connect or disconnect plants at low frequency to fully eliminate steady-state errors [
13]. Further,
and
were in charge of providing
; let us recall that
were filters of unitary gain at the pass-band. The use of feedforward
allows reducing the amount of feedback
; in fact, the formal QFT method pursues the minimum set of
for the existence of
. As
reduces,
(
11) also reduces in comparison with
solutions (feedback-only control structures are the only option when disturbances are nonmeasurable, as in [
10,
12]).
An additional flexibility of multi-input systems is the possibility of moving the system operating point
by changing the input resetting point
of the plants that do not work at low frequencies [
9,
12,
32].
The output reference
is considered constant in the present work. For tracking control problems, feedforwarding
can achieve important benefits; a control architecture and design method were provided in [
13].











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}