
Dynamical Analysis of Bio-Ethanol Production Model under Generalized Nonlocal Operator in Caputo Sense




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction and Motivation
2. Preliminaries
3. Model Formulation and Its Analysis
- The parameter denotes the flow rate via reactor;
- The death coefficient is represented by ;
- is the dimensionless rate of death;
- and is the saturation constant and the inhibition constant by ethanol, respectively;
- , , and denote the biomass, substrate, and ethanol, respectively;
- , , and represent the dimensionless biomass, substrate, and ethanol concentrations, respectively;
- the volume of the reactor;
- t and represent time and dimensionless time, respectively;
- and denote the biomass and ethanol/biomass yield coefficient, respectively;
- The ethanol production’s kinetic constant is represented by ;
- denotes the rate of the specific growth rate;
- is the maximum rate of specific growth;
- and denote the residence time and dimensionless residence time, respectively;
- represents the recycle ratio which is based on the flow rates of volume;
- is the parameter which represents the effective recycle.
4. Dynamical Analysis
4.1. Theoretical Analysis of the Proposed Model
- (A1): All parameters are positive.
- (A2):
- (A3):
4.1.1. Existence of Solution via Fixed Point Results
4.1.2. Ulam’s Stability
- for
- for
4.2. Computational Analysis of the Proposed Model
Predictor-Corrector Algorithm
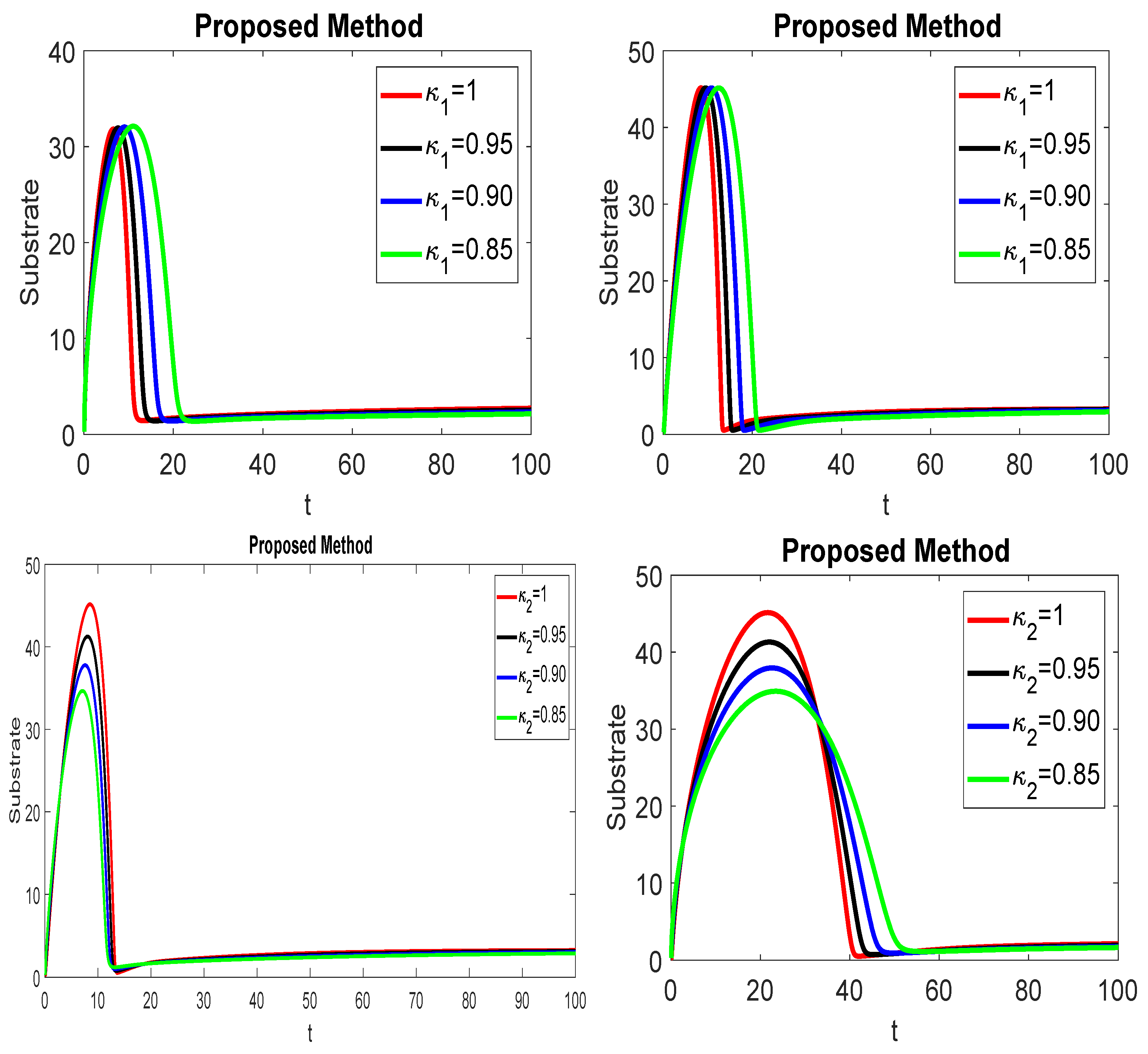
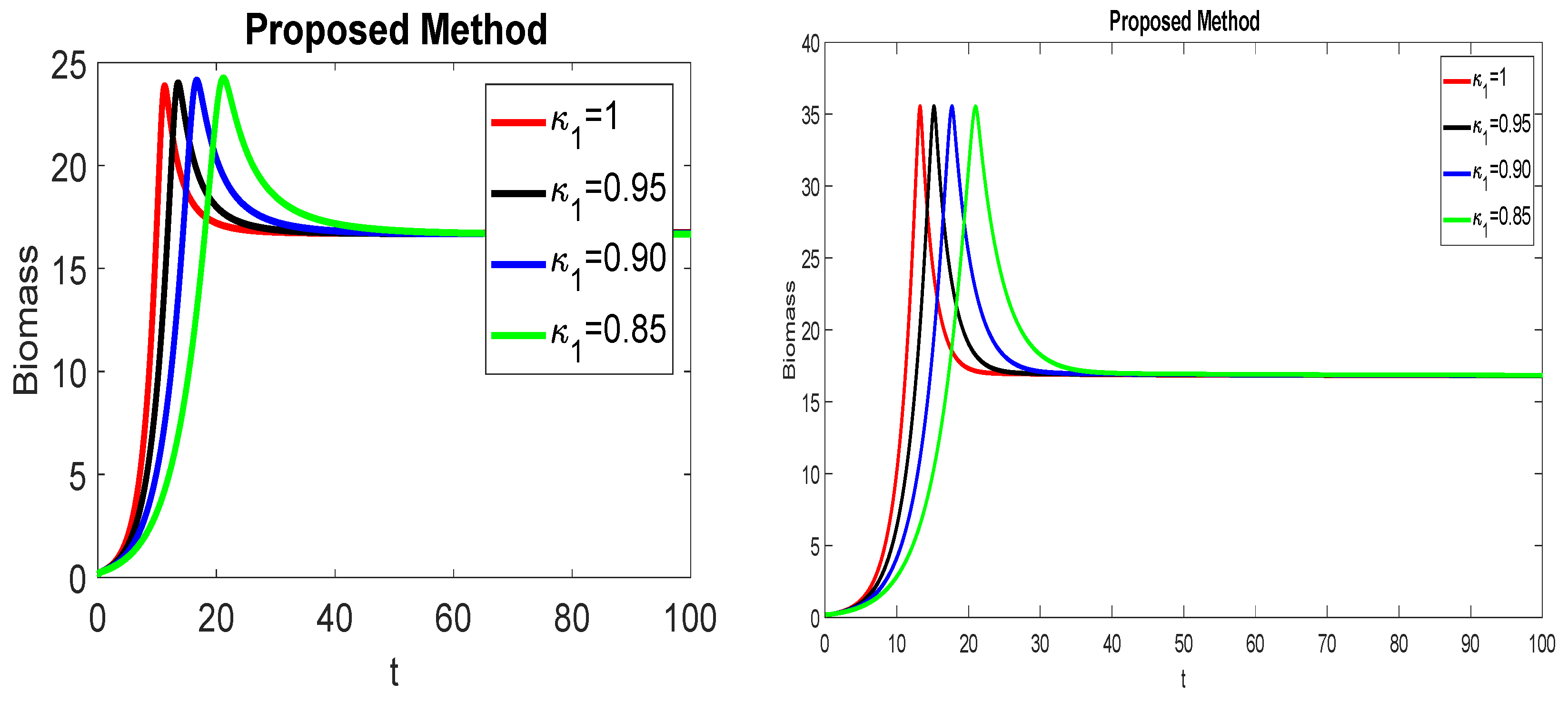
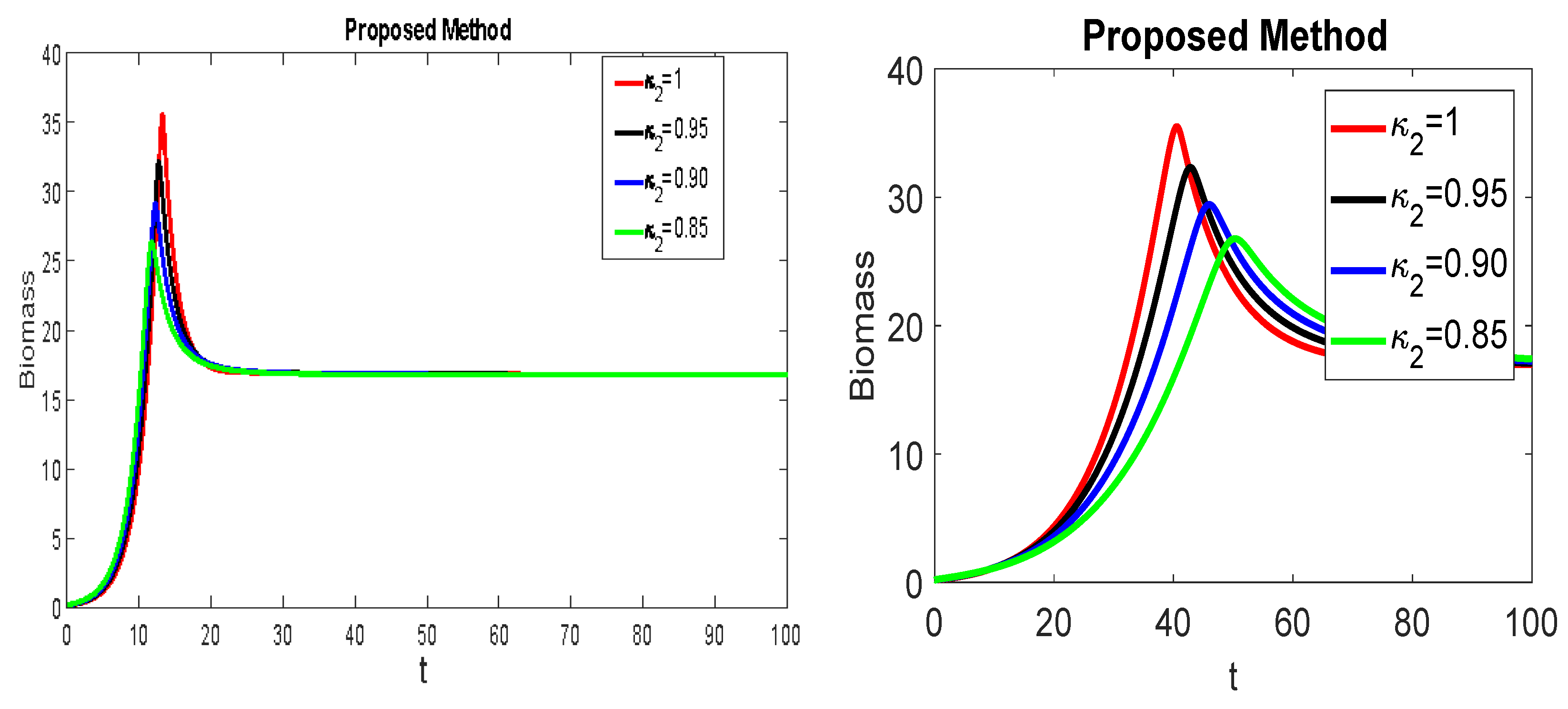
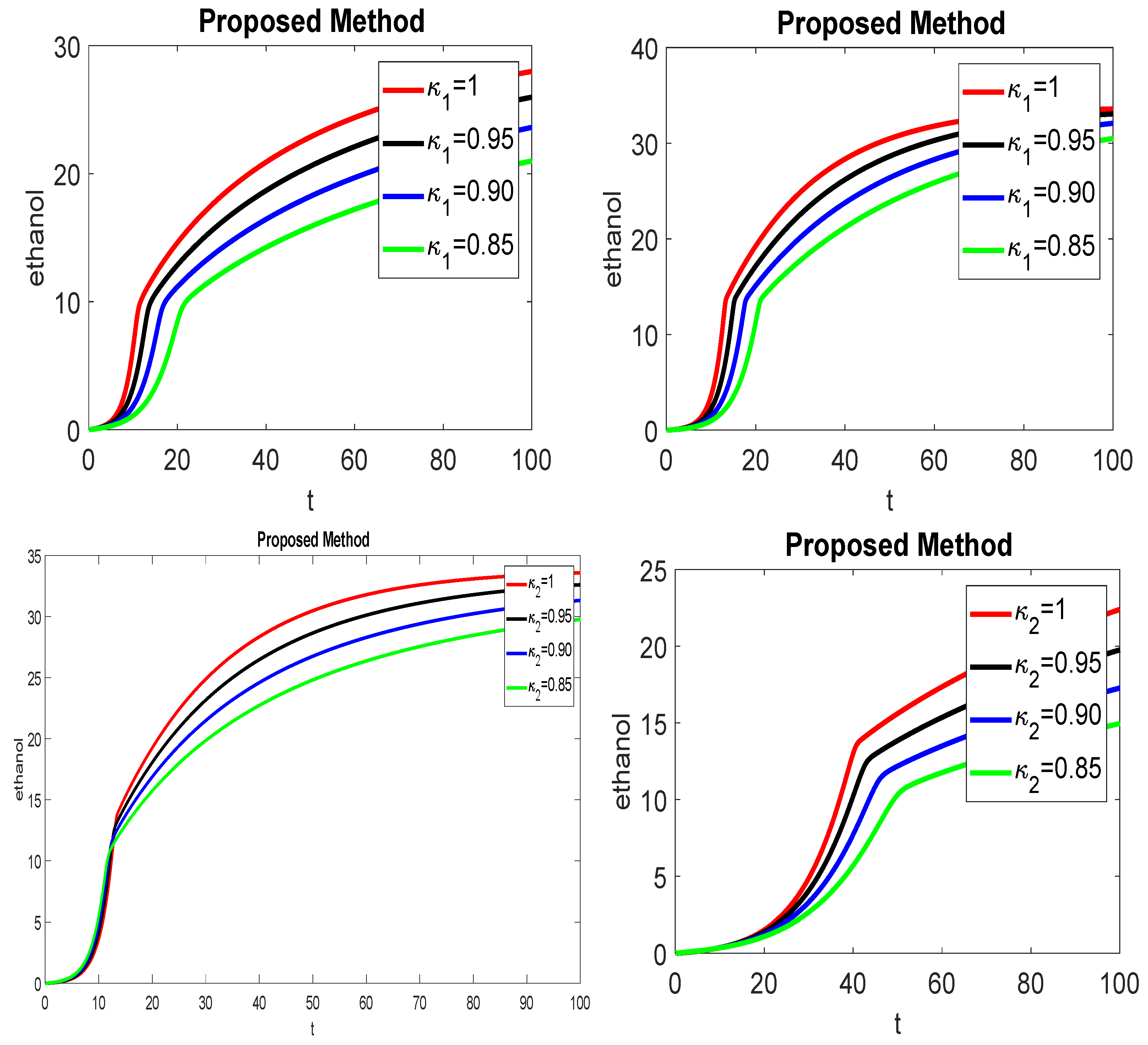
5. Graphical Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kaparaju, P.; Serrano, M.; Thomsen, A.B.; Kongjan, P.; Angelidaki, I. Bioethanol, biohydrogen and biogas production from wheat straw in a biorefinery concept. Bioresour. Technol. 2009, 100, 2562–2568. [Google Scholar] [CrossRef]
- Nigam, P.S.; Singh, A. Production of liquid biofuels from renewable resources. Prog. Energy Combust. Sci. 2011, 37, 52–68. [Google Scholar] [CrossRef]
- Stichnothe, H.; Azapagic, A. Bioethanol from waste: Life cycle estimation of the greenhouse gas saving potential. Resour. Conserv. Recycl. 2011, 53, 624–630. [Google Scholar] [CrossRef]
- Shuler, M.L.; Fikret, K. Bioprocess Engineering: Basic Concepts; Prentice-Hall International: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Alqahtani, R.T.; Nelson, M.I.; Worthy, A.L. Analysis of a chemostat model with variable yield coefficient and substrate inhibition: Contois growth kinetics. Chem. Eng. Commun. 2015, 202, 332–344. [Google Scholar] [CrossRef] [Green Version]
- Alqahtani, R.T.; Nelson, M.I.; Worthy, A.L. A biological treatment of industrial wastewaters: Contois kinetics. ANZIAM J. 2015, 56, 397–415. [Google Scholar] [CrossRef]
- Ajbar, A.H. Study of complex dynamics in pure and simple microbial competition. Chem. Eng. Sci. 2012, 80, 188–194. [Google Scholar] [CrossRef]
- Isla, M.A.; Comelli, R.N.; Seluy, L.G. Wastewater from the soft drinks industry as a source for bioethanol production. Bioresour. Technol. 2013, 136, 140–147. [Google Scholar] [CrossRef] [PubMed]
- Comelli, R.N.; Seluy, L.G.; Isla, M.A. Performance of several saccharomyces strains for the alcoholic fermentation of sugar-sweetened high-strength wastewaters: Comparative analysis and kinetic modelling. New Biotechnol. 2016, 33, 874–882. [Google Scholar] [CrossRef]
- Bhowmik, S.K.; Alqahtani, R.T. Mathematical analysis of bioethanol production through continuous reactor with a settling unit. Comput. Chem. Eng. 2018, 111, 241–251. [Google Scholar] [CrossRef]
- Ahmad, S.; Ullah, A.; Akgül, A.; Baleanu, D. Analysis of the fractional tumour-immune-vitamins model with Mittag–Leffler kernel. Results Phys. 2020, 19, 103559. [Google Scholar] [CrossRef]
- Ahmad, S.; Ullah, A.; Shah, K.; Akgül, A. Computational analysis of the third order dispersive fractional PDE under exponential-decay and Mittag-Leffler type kernels. Numer. Methods Partial. Differ. Equ. 2020. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.H.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 1–13. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with non-local and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, S.; Ullah, A.; Arfan, M.; Shah, K. On analysis of the fractional mathematical model of rotavirus epidemic with the effects of breastfeeding and vaccination under Atangana-Baleanu (AB) derivative. Chaos Solitons Fractals 2020, 140, 110233. [Google Scholar] [CrossRef]
- Ahmad, S.; Ullah, A.; Akgül, A.; De la Sen, M. A study of fractional order Ambartsumian equation involving exponential decay kernel. AIMS Math. 2021, 6, 9981–9997. [Google Scholar] [CrossRef]
- Ullah, A.; Abdeljawad, T.; Ahmad, S.; Shah, K. Study of a fractional-order epidemic model of childhood diseases. J. Funct. Spaces 2020, 2020, 5895310. [Google Scholar] [CrossRef] [PubMed]
- Diethelm, K.; Ford, N.J.; Freed, A.D. A predictor–corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 2002, 29, 3–22. [Google Scholar] [CrossRef]
- Owolabi, K.M.; Atangana, A. Analysis and application of new fractional Adams-Bashforth scheme with Caputo-Fabrizio derivative. Chaos Solitons Fractals 2017, 105, 111–119. [Google Scholar] [CrossRef]
- Shawagfeh, N.T. The decomposition method for fractional differential equations. J. Fract. Calc. 1999, 16, 27–33. [Google Scholar]
- Darania, P.; Ebadian, A. A method for the numerical solution of the integro-differential equations. Appl. Math. Comput. 2007, 188, 657–668. [Google Scholar] [CrossRef]
- Hashim, I.; Abdulaziz, O.; Momani, S. Homotopy analysis method for fractional IVPs. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 674–684. [Google Scholar] [CrossRef]
- Katugampola, U.N. A new approach to generalized fractional derivatives. Bull. Math. Anal. Appl. 2014, 6, 1–15. [Google Scholar]
- Katugampola, U.N. New approach to generalized fractional integral. Appl. Math. Comput. 2011, 218, 860–865. [Google Scholar] [CrossRef] [Green Version]
- Odibat, Z.; Baleanu, D. Numerical simulation of initial value problems with generalized Caputotype fractional derivatives. Appl. Numer. Math. 2020, 156, 94–105. [Google Scholar] [CrossRef]
- Kumar, P.; Erturk, V.S.; Murillo-Arcila, M. A complex fractional mathematical modeling for the love story of Layla and Majnun. Chaos Solitons Fractals 2021, 150, 111091. [Google Scholar] [CrossRef]
- Kongson, J.; Thaiprayoon, C.; Sudsutad, W. Analysis of a fractional model for HIV CD4+ T-cells with treatment under generalized Caputo fractional derivative. AIMS Math. 2021, 6, 7285–7304. [Google Scholar] [CrossRef]
- Asl, M.S.; Javidi, M. An improved PC scheme for nonlinear fractional differential equations: Error and stability analysis. J. Comput. Appl. Math. 2017, 324, 101–117. [Google Scholar] [CrossRef]
- Garrappa, R. On some explicit Adams multistep methods for fractional differential equations. J. Comput. Appl. Math. 2009, 299, 392–399. [Google Scholar] [CrossRef] [Green Version]
- Odibat, Z.; Shawagfeh, N. An optimized linearization-based predictor–corrector algorithm for the numerical simulation of nonlinear FDEs. Phys. Scr. 2020, 95, 065202. [Google Scholar] [CrossRef]
- Garrappa, R. Numerical Solution of Fractional Differential Equations: A Survey and a Software Tutorial. Mathematics 2018, 6, 16. [Google Scholar] [CrossRef] [Green Version]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alqahtani, R.T.; Ahmad, S.; Akgül, A. Dynamical Analysis of Bio-Ethanol Production Model under Generalized Nonlocal Operator in Caputo Sense. Mathematics 2021, 9, 2370. https://doi.org/10.3390/math9192370
Alqahtani RT, Ahmad S, Akgül A. Dynamical Analysis of Bio-Ethanol Production Model under Generalized Nonlocal Operator in Caputo Sense. Mathematics. 2021; 9(19):2370. https://doi.org/10.3390/math9192370
Chicago/Turabian StyleAlqahtani, Rubayyi T., Shabir Ahmad, and Ali Akgül. 2021. "Dynamical Analysis of Bio-Ethanol Production Model under Generalized Nonlocal Operator in Caputo Sense" Mathematics 9, no. 19: 2370. https://doi.org/10.3390/math9192370
APA StyleAlqahtani, R. T., Ahmad, S., & Akgül, A. (2021). Dynamical Analysis of Bio-Ethanol Production Model under Generalized Nonlocal Operator in Caputo Sense. Mathematics, 9(19), 2370. https://doi.org/10.3390/math9192370