1. Introduction
Coronavirus disease (COVID-19) is a condition caused by the newly found Coronavirus SARS-COV-2. The majority of patients infected with COVID-19 will have mild to moderate symptoms and will recover without therapy. When an infected individual coughs, sneezes, or exhales, the virus that causes COVID-19 is primarily transferred by droplets. These droplets are too heavy to float in the air and fall to the ground or other surfaces swiftly. If you are in close contact to someone who has COVID-19, you can be infected by breathing in the virus or touching a contaminated surface and then touching your eyes, nose, or mouth. West Bengal, India was first affected by Coronavirus (COVID-19) on 17 March 2020; in Kolkata a sum of 1,343,442 COVID-19 positive cases have been confirmed by West Bengal’s Health and Family Welfare Department, until 28 May 2021 [
1].
Various countries have used non-pharmaceutical treatments (NPIs) such as masking, social distancing, and good hygiene practice to combat the COVID-19 pandemic. This procedure aids in slowing, but not stopping, the progress of the disease. In order to eradicate COVID-19 as a pandemic, effective immunization tactics based on NPIs are required. To overcome COVID-19, a combination of fundamental techniques is unavoidably necessary under the optimal control problem. The actual number of infected patients in West Bengal is anticipated to be higher than the official count due to the restricted number of tests undertaken [
1]. According to the WHO, the genuine asymptomatic transmission rates are unknown [
2]. As a result, we have taken into account the fact that the asymptomatic class does not transmit sickness and that the Coronavirus is mostly distributed by infected individuals (symptomatically infected and infected with co-morbidity). In phases of co-morbidity (such as heart disease, diabetes, pulmonary disease, and so on) within infected humans, several studies may be available. Co-morbidity or medical disease puts everyone at a higher risk of infection than healthy persons [
3]. From statistical databases, it is evident that co-morbidity risk condition in India is pronounced. Patients suffering from hypertension or diabetes mellitus are more likely to acquire a severe course and illness development [
4,
5,
6]. The immunization program has a significant impact on pandemic eradication [
7].
Calculus of fractional order can be thought of as an abstraction of the order of differentiation in which the fractional order is substituted by the integer order. However, some properties of classical integer order systems, such as Leibnitz’s rule and chain rules, are not preserved in fractional calculus [
8]. An integer system is sometimes unable to express memory-based and hereditary property phenomena [
9,
10]. There are two main approaches in fractional calculus, namely, the continuous and discrete approaches. The discrete approach is based on Grunwald–Letnikov functional derivative whereas the continuous approaches are based on the Riemann–Liouville, Caputo derivative [
11]. It has been observed that the data gathered from real-world events fit better with fractional-order systems. Diethelm [
12] has compared the numerical solutions of the fractional-order system and integer-order system, and concluded that the fractional-order system gives more relevant interpretation than integer-order system. Recently, we have contributed to fractional-order dynamical research in the epidemiological field [
13,
14,
15,
16]. Many researchers have made significant contributions to various COVID-19 models [
14,
17,
18,
19,
20,
21,
22,
23,
24]. Because the fractional derivative is a generalization of the integer-order derivative, fractional-order modeling has been used to investigate the disease transmission dynamics. In addition, the integer-order differentiation is local, whereas the fractional differentiation is not so. This behavior helps in the simulation of epidemic situations. Furthermore, the fractional derivative has the capability to improve the system’s stability zone. The calculus of fractional order system adds an additional parameter to the modeling framework, which helps in numerical simulations. The prior models are highly useful for analyzing COVID-19 transmission; however, they ignore co-morbidity, vaccinated classes, and the West Bengal pandemic situation. These facts, as well as the benefits of calculus of fraction order, compel us to build the proposed model on COVID-19 in the Caputo fractional framework.
In this study, a modified-fractional-order SAVICR model for two sub-compartments of infected patients (with or without co-morbidity) and vaccinated patients was developed (
Section 2). Next, we estimated the model’s fundamental reproduction number. The solutions’ uniqueness, non-negativity, and boundedness were confirmed for the system’s well-posedness (
Section 4). We also studied the local stability of disease-free equilibrium point and endemic equilibrium (
Section 4,
Section 4.4). We considered a control problem by modifying the previous system with controlling vaccination and social distancing (
Section 5). Furthermore, we numerically investigated the dynamical system in relation to the parameter values associated with the West Bengal situation in 2021 (
Section 6).
Section 7 concludes with some key points.
2. Model Formulation
Fractional differentiation operator of the Caputo type was first introduced in the year 1967 by Michele Caputo [
25,
26].
Definition 1 (Refs. [
25,
27])
. The Caputo derivative with order for a absolute continuous and differentiable function g on is defined as: In our whole context, we have used instead of and . Caputo derivative is defined only for differentiable functions while the functions that have no first-order derivative might have no Caputo derivative.
Applying Caputo fractional differential equations, the following six compartmental models have been created:
Here
is the notation of fractional derivative of order
in Caputo sense with initial time
(assuming that
). For simplicity we use
instead of
. System 1 is dimensionally correct as both sides have same time dimension
. It is also noticed that the equilibrium points and reproduction number contain
as all the parameters contain
in power form. We have omitted the power
of all parameters (for simplicity) in theoretical analysis. In numerical simulations, we have taken into account the power
of all parameters. Now, system 1 transforms to:
It is presumed
. Schematic diagram of system 2 is shown in
Figure 1.
The susceptible, asymptomatically infected, Vaccinated class, symptomatically infected without co-morbidity, symptomatically infected with co-morbidity and recovered or removed population at time
t are represented by
, and
, respectively.
Table 1 provides a brief description of all parameters.
3. Equilibrium Points and Basic Reproduction Number
The disease-free equilibrium point and endemic equilibrium point of system (2) are given below.
The basic reproduction number, indicated by
, is the estimated number of secondary cases generated by the infection of a single individual. The basic reproduction number
is calculated at disease-free equilibrium point
by the help of the NGM (Next Generation Matrix) whose dominant eigenvalue is
[
28,
29]. The components A, I, and C in system (2) are explicitly appended with a disease transmission. The matrices
represent respective new infection and transition matrices.
Consider
, the subsystem of system (2) can be represented as:
and
and
are the Jacobian of
at disease-free equilibrium
where
Reproduction number is a function of because each parameter is a function of . The value of has been fixed for analysis reasons. If we modify the value of , it will affect all other parametric values, including the value of .
4. Basic Analysis of the System (2)
This section has carefully accomplished certain basic results such as existence, non-negativity, boundedness, and stability of system (2).
4.1. Preliminaries of Caputo Fractional Calculus
The following definitions and theorems are essential for further theoretical study.
Lemma 1 (Ref. [
30])
. Consider a continuous function on where and is continuous on , thenwhere , . Remark 1. If for all , then is a non-decreasing (non-increasing) function for .
Definition 2 (Ref. [
8])
. Mittag–Leffler functions of single and double parameters are described below: Theorem 1 (Ref. [
31])
. Suppose is differentiable with exponential order and . Further, if is piece-wise continuous on , thenwhere the Laplace transform of is represented by . Theorem 2 (Ref. [
32])
. For any complex number M and , we havewhere the real part of and is the two parametric Mittag–Leffler function. Theorem 3 (Ref. [
27])
. Consider:with , . The equilibrium points of the above system are solutions to the equation . An equilibrium is locally asymptotically stable if all eigenvalues () of the Jacobian matrix calculated at the equilibrium points satisfy . 4.2. Existence and Uniqueness
Lemma 2 (Ref. [
33])
. Consider the system:with initial condition , where , , if satisfies local Lipschitz condition with respect to x, then there exists a unique solution of (5) on .In our context .
Now, we have the following theorem.
Theorem 4. The system (2) with initial condition , possess a unique solution , .
4.3. Non-Negativity and Boundedness
Here, we first studied the non-negativity and then we demonstrated that all solutions of system (2) are bounded.
Theorem 5. The solutions of model (2) with initial values lie in .
Proof. We can deduce from Lemma 1 that
is increasing in near
, and
is unable to go across the axis
. As a result,
S is non-negative and similarly we can show
for all
(from Equation (
8)). We now assert that
commences in
cannot be negative. Contrarily, there exists
such that
traverses the
axis for the first time at
with the following possibilities.
Relation (7) revels that . and this leads the following cases.
Case1: Suppose , then from Lemma 1, is not decreasing in the neighborhood of , and . As a result, a contradiction occurs.
Case2: On the other hand
, which discloses
must be negative. If
, then a
exists with
From (9), we obtain
which refutes
. Therefore,
,
and also
,
.
Once again from (10) and (11), we can conclude are non-negative.
As a result, all solutions of system (2) that begin with are constricted to the region . □
Theorem 6 (Boundedness). System (1) has uniformly bounded solutions .
Proof. It is clear from the first equation of (2) that
Using Laplace transforms
, we have
Using inverse Laplace transforms (using Theorem 2):
Therefore,
From the properties of Mittag–Leffler function: [
34]:
Let .
Using Laplace transformation, we have (using Theorem 1):
Using inverse Laplace transforms (using Theorem 2):
From (12) and (13), we obtain
Thus are bounded and hence the solution is bounded in for . □
4.4. Local Stability
For simplicity of analytical studies, we have reduced the system (2) by omitting the sixth equation as
R does not present in top five equations of system (2). The dynamics of
R also be obtained from the dynamics of
. The following is the reduced system:
In this casewe have to analyze the stability of equilibriumpoints
and
, where
and
For to exist in feasible region , it is necessary and sufficient that . From simple calculation it is clear that if . If , then the disease-free equilibrium and endemic equilibrium points will be confluent.
The following lemma is essential for analysis of system (14).
Lemma 3 (Refs. [
35,
36])
. Suppose be the characteristic equation of system evaluated at equilibrium point. For , is the discriminant of the characteristic equation which is represented as Lemma 4 (Ref. [
37])
. Suppose hold, then the equilibrium point is asymptotically stable if . If then must hold. Theorem 7. The disease-free equilibrium point of system (14) is locally asymptotically stable if and only if .
Theorem 8. The endemic equilibrium of system (14) is unstable.
4.5. Sensitivity Analysis
It is clear that
relies on different parameters and value of
is
for
Table 2. The normalized forward sensitivity index with regard to each parameter has been derived as follows to analyze the sensitivity of
to any parameter (say,
) [
29,
38]:
The sensitivity index can be affected by different factors, but it may also be constant or unrelated to them. These values are critical for estimating the sensitivity of parameters, which should be performed with caution because even minor changes in a parameter can produce significant quantitative changes. It is not necessary to be cautious while estimating a parameter with a lower sensitivity index because little changes in that parameter create small changes. We focused on the parameters
because we could not manage
.
Table 3 shows the sensitivity index values for the parameters
that match
Table 2. From
Table 3, it is revealed that infection transmission rate
, recovery rate of without co-morbidity class, and vaccination rate are highly sensitive. According to the sensitivity index (
Table 3), the transmission rate from symptomatically infected people is the most sensitive of all the criteria for lowering disease prevalence, and vaccination lowers the number of symptomatically infected people. As a result, reducing virus transmission through social distancing and vaccination, as well as other preventative measures, would aid in the timely management of this pandemic situation.
5. Fractional-Order Optimal Control
One of the most important preventative precautions that everyone should do is to keep social distances and maintain adequate cleanliness [
40]. Aside from that, other vaccines are now accessible, and people are being advised to take the appropriate amount to avoid future infection. As a result, these tactics have been implemented into this system in order to limit the quick transfer of information. Our goal is to reduce the number of susceptible and contaminated people together with the cost of applying combined control measures
(social distance and vaccination). Though Ding et al. [
41] and Agarwal et al. [
42] have made early contributions to optimal control theory in fractional calculus, recently many researchers have significantly contributed in the field of fractional-order control [
43,
44].
One of the most important results in classical and fractional optimal control is the Pontryagin Principle [
43,
45]. The method is similar to what was used to solve the traditional integer-order optimal control problem. We have already studied some control problems using the Pontryagin Principle for fractional-order systems [
15,
16]. The main distinction is that in a fractional-order optimal control problem, the adjoint equations are in the Right-Riemann–Liouville derivative (
) of order
but the co-state equations are in Caputo differential equations. System (2) is reintroduced by implementing some control interventions that can reduce the disease load. We have introduced two controls,
, where
v is considered as intensity of vaccination and
u can be considered as non-pharmaceutical interventions (complete or partial lockdown, social distancing, etc.) with
. Here,
portrays no such non-pharmaceutical interventions maintained in definite time zone ([0,
]), while
represents the scenario where full
interventions is maintained; whereas
denotes no vaccination and
stands for fully vaccinated.
Consider
be the control space with measurable control function
. Our main objective is to minimize the cost function
J in
by finding optimal solution as follows:
subject to
The next theorem shows the existence of optimal solution of control problem.
Theorem 9. Suppose the control function be measurable on and . Then there subsists an optimal control , which minimizes of (20) withwhere andand are the corresponding optimal state variables of (17). Proof. Consider the following Hamiltonian function:
where adjoint variables are denoted by
with
).
For control system (17), let us consider that
are applied optimal control interventions with optimal state variables
:
From optimality conditions [
45], we have obtained the optimal conditions:
So, in
U, we have
and
where
□
6. Numerical Simulations
For numerical purposes, we have used the MatLab software in combination with Roberto Garrappa’s fd12 Matlab function for fractional differential equations [
46]. For the optimal control problem, the iterative scheme (Euler’s forward and backward) has been used [
15].
Table 4 depicts the pandemic scenario of West Bengal in the period 1 June 2021 to 20 October 2021. We have also considered system (1) where all parameters contain
. The value of reproduction number
is 0.0152 according to
Table 2, which suggests the non-existence of an endemic equilibrium point and the existence of asymptotically stable disease free equilibrium. Numerical simulations have been compared to the model’s conclusions to real-world data from WHO [
47] and worldometers [
48] reports. The total population of West Bengal is around
[
1]. We considered
day as the minimum time unit and end time is
days. We have also considered
as the total infected population due to COVID-19 in West Bengal. The symptomatically infected cases (with or without co-morbidity), from 1 June 2021 to 20 October 2021, are listed in
Table 4 with 5 days interval [
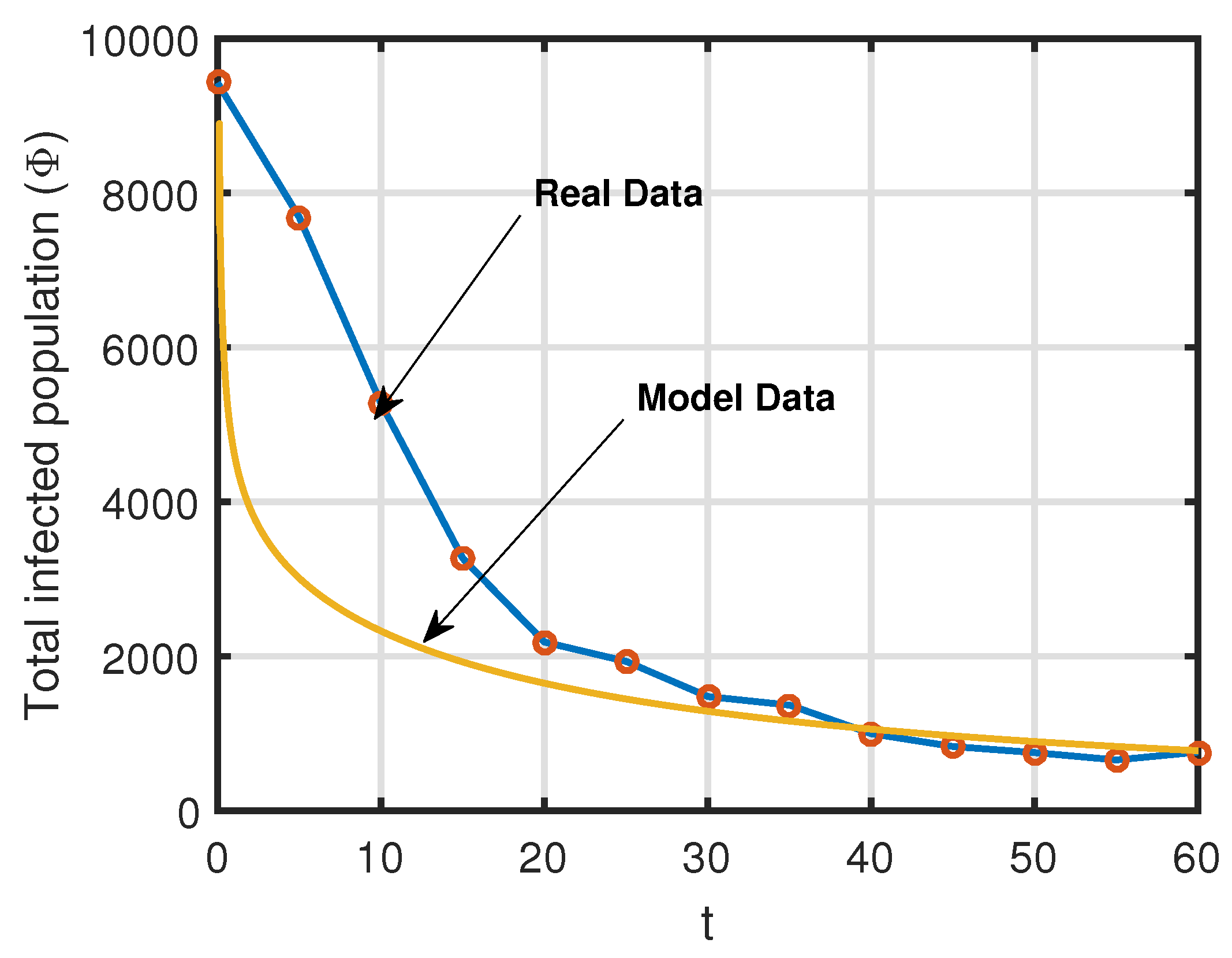
1]. Initially, we have simulated our system for 60 days, and then we extended our limit to 150 days. We saw that in the beginning, the time series of total infected population (
) does not quite fit with actual data; however, around t = 30 days, the model data fit well with real data when the order of the derivative was 0.7 (
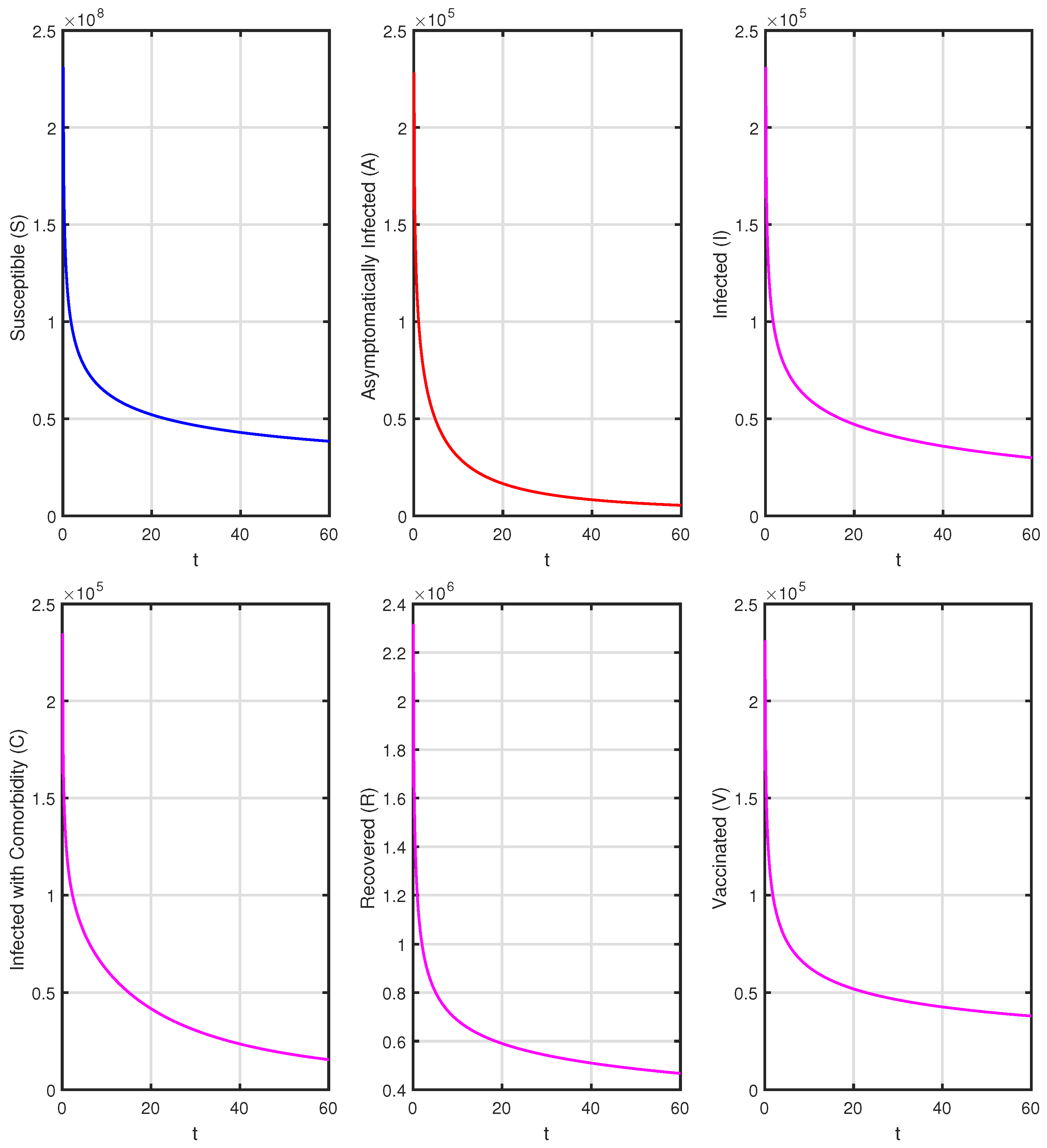
Figure 2). Next, we performed numerical simulation using
Table 2 from 1 June to 30 October 2021 (
Figure 3) and real data are taken up to 20 October 2021.
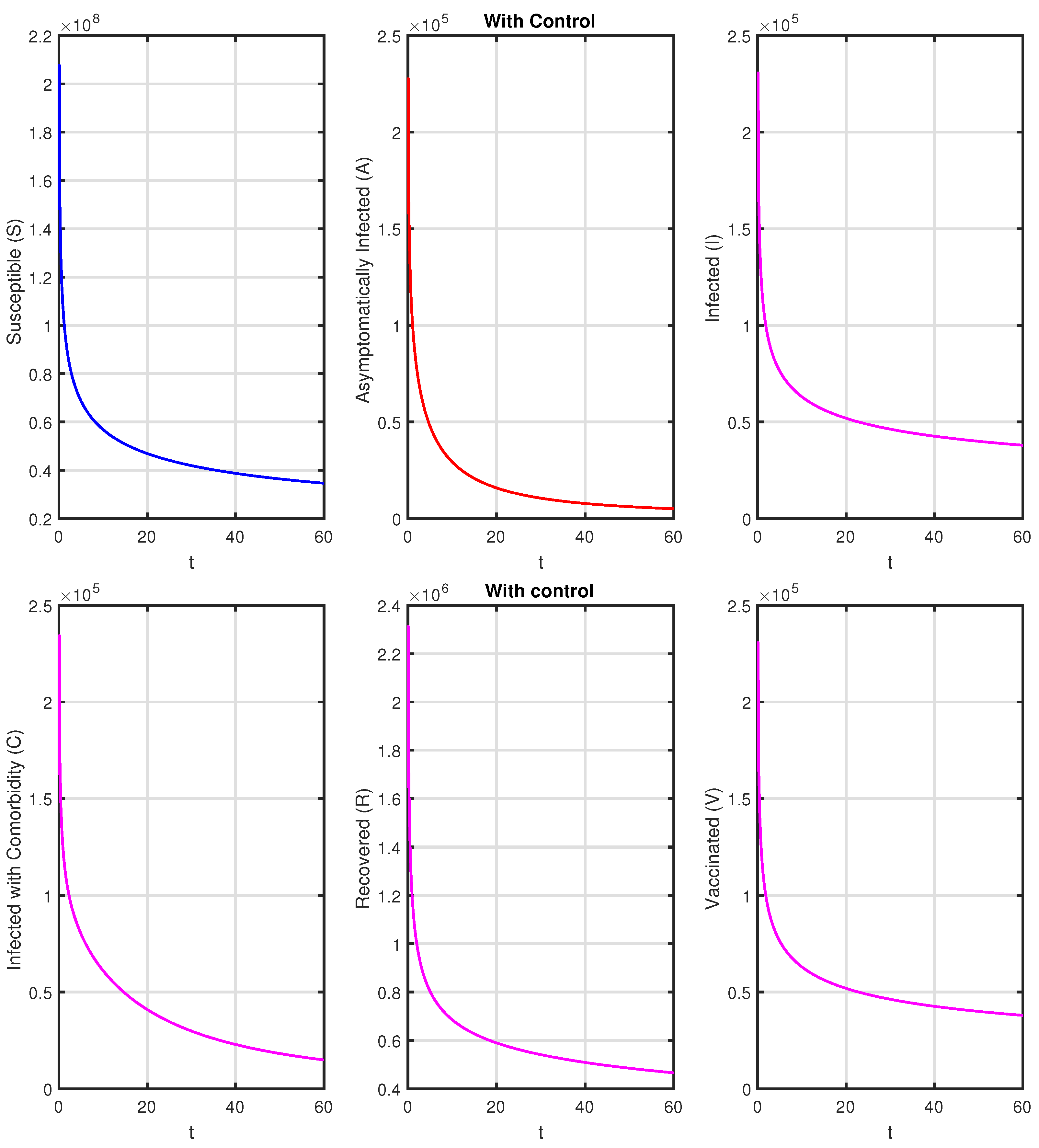
For the optimal control problem, we have assumed
, all are in INR (Indian Rupee). It is observed from
Figure 4 and
Figure 5 that infected population with co-morbidity is decreasing if we control both factors (vaccination and social distancing) simultaneously. After effectively executing control policy, the number of infected individuals with co-morbidity will be lowered from 15,860 to 14,970 (
Figure 4 and
Figure 5).
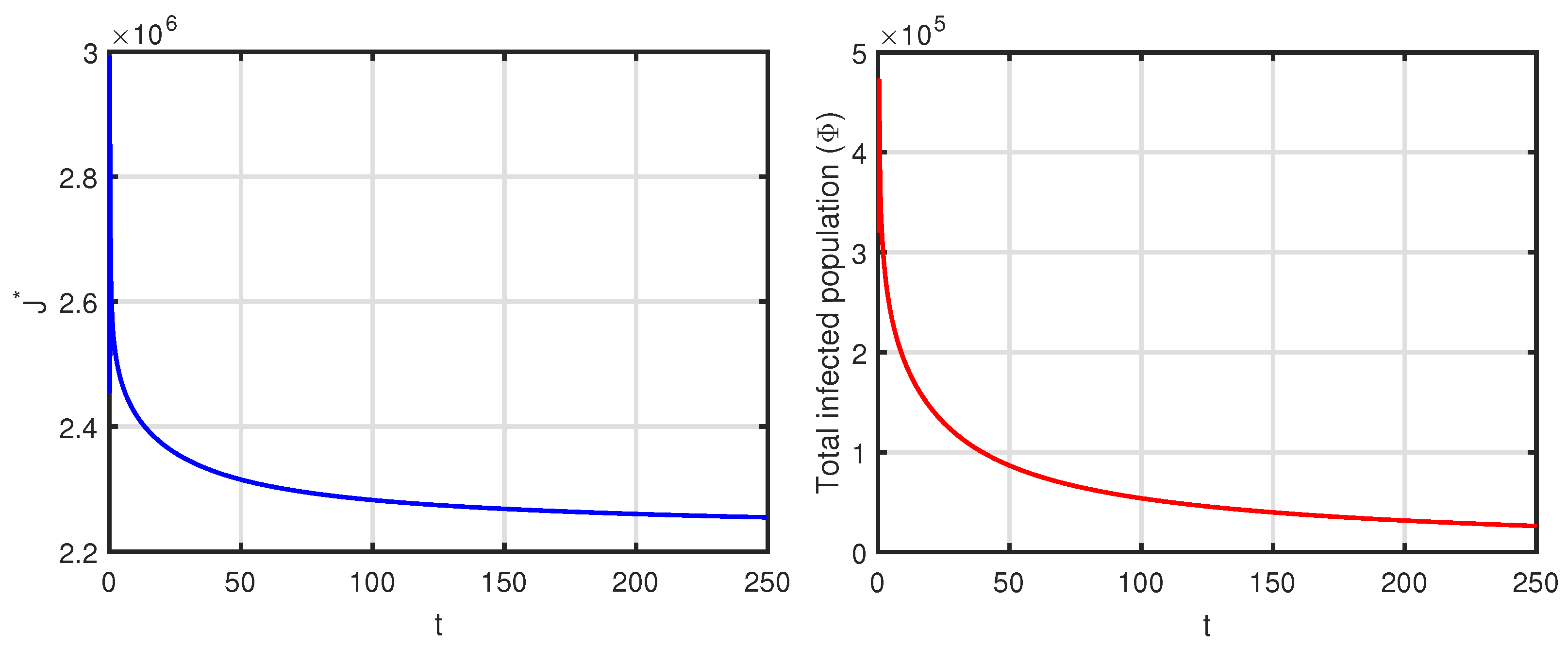
Figure 6 depicts the time series of the optimal control variables and the optimal cost of implementation of the control policy. It has been noted that the effect of controls
is minimal in the time span of 60 days.
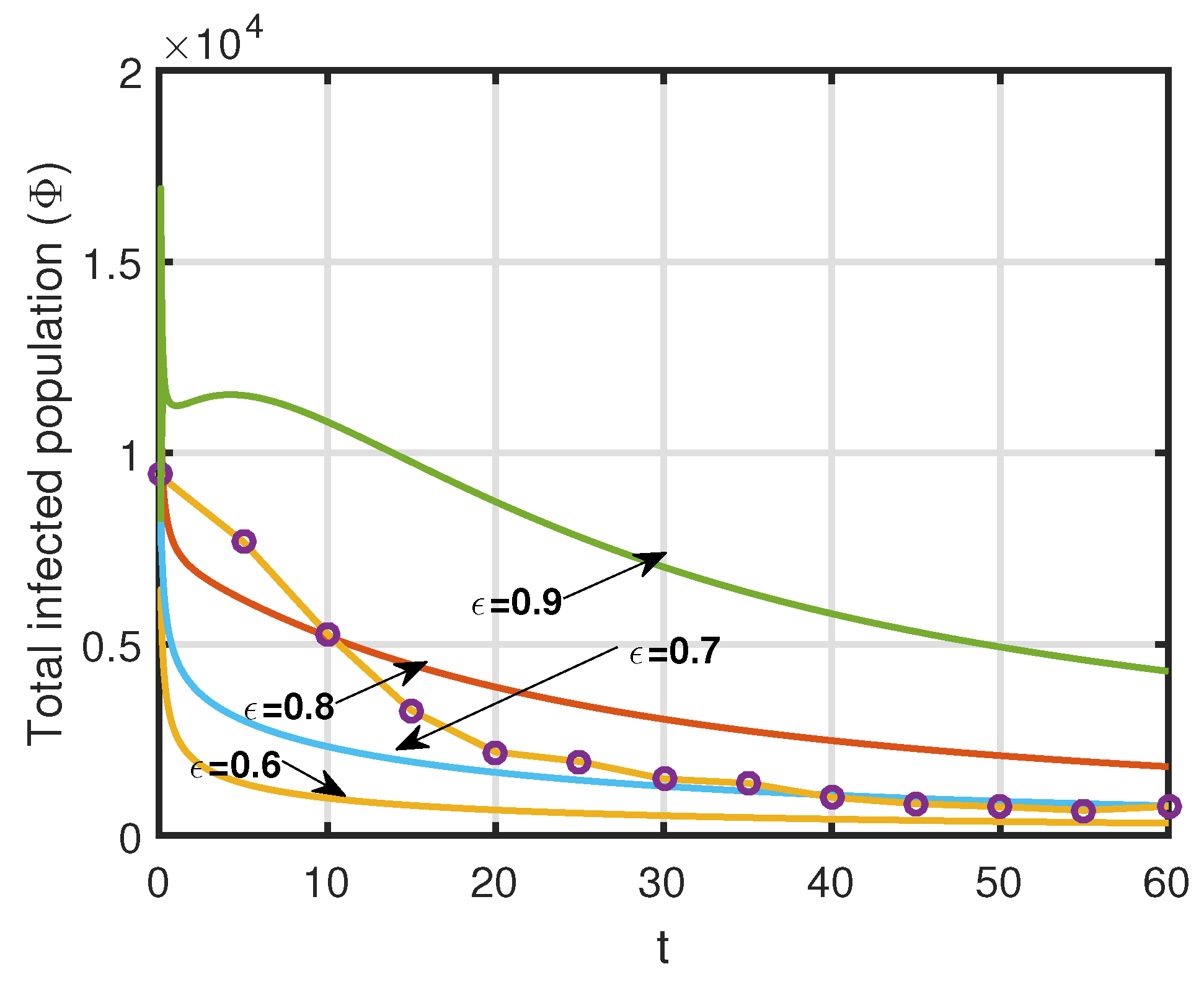
Figure 7 suggests the variation of total infected population (
) when the combined control strategy is applied. For
, we saw that the population of the total infected class (
) is not far from the realistic scenario for West Bengal (
Figure 8 and
Figure 9). We have estimated
by graphical method using MatLab (
Figure 9). Other parameters have been estimated in similar graphical method using MatLab as mentioned in
Table 2 (
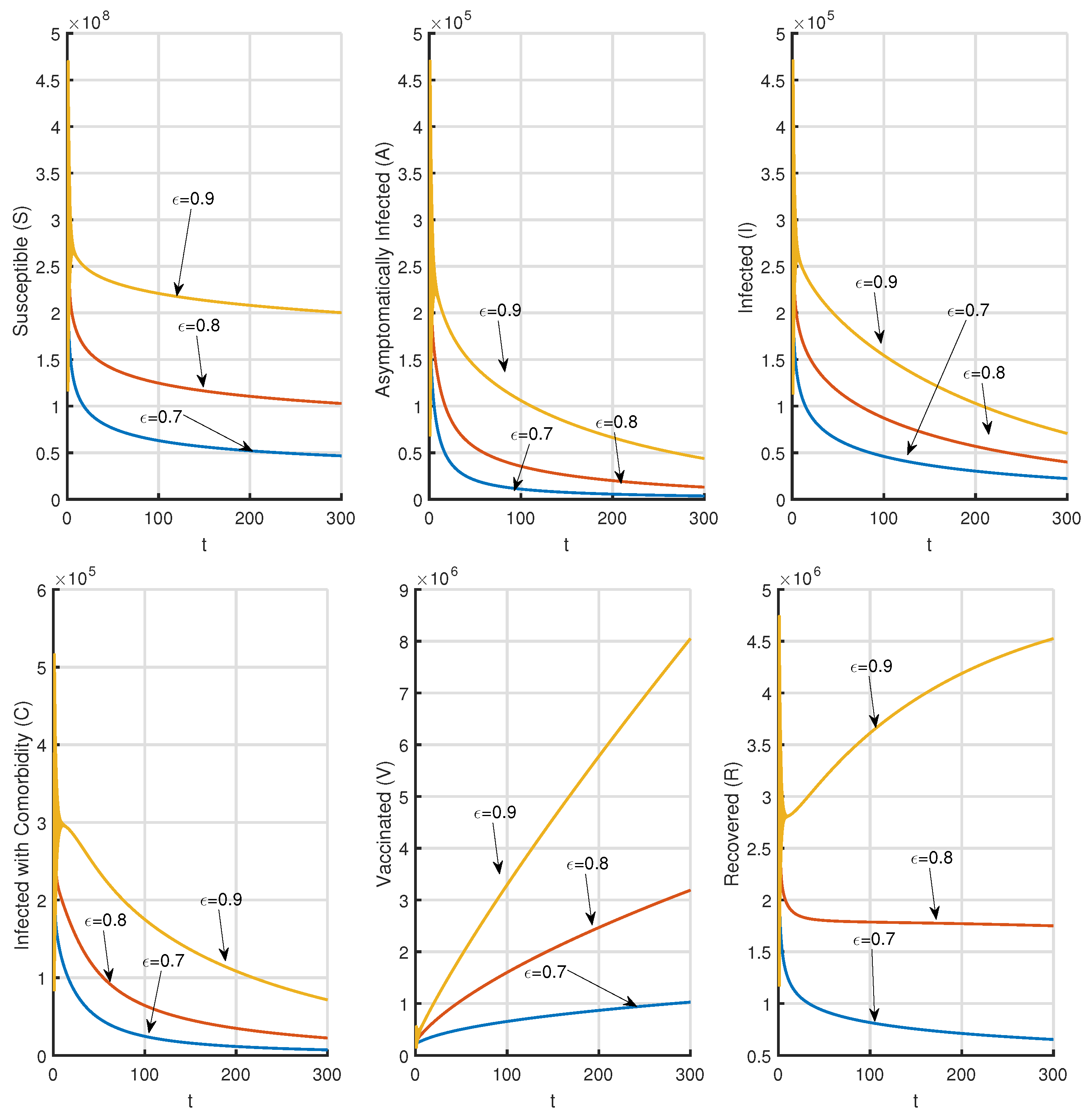
Figure 10). In
Figure 10, the variation of time series of different state variables have been produced for different values of
for the long time period (t = 300).
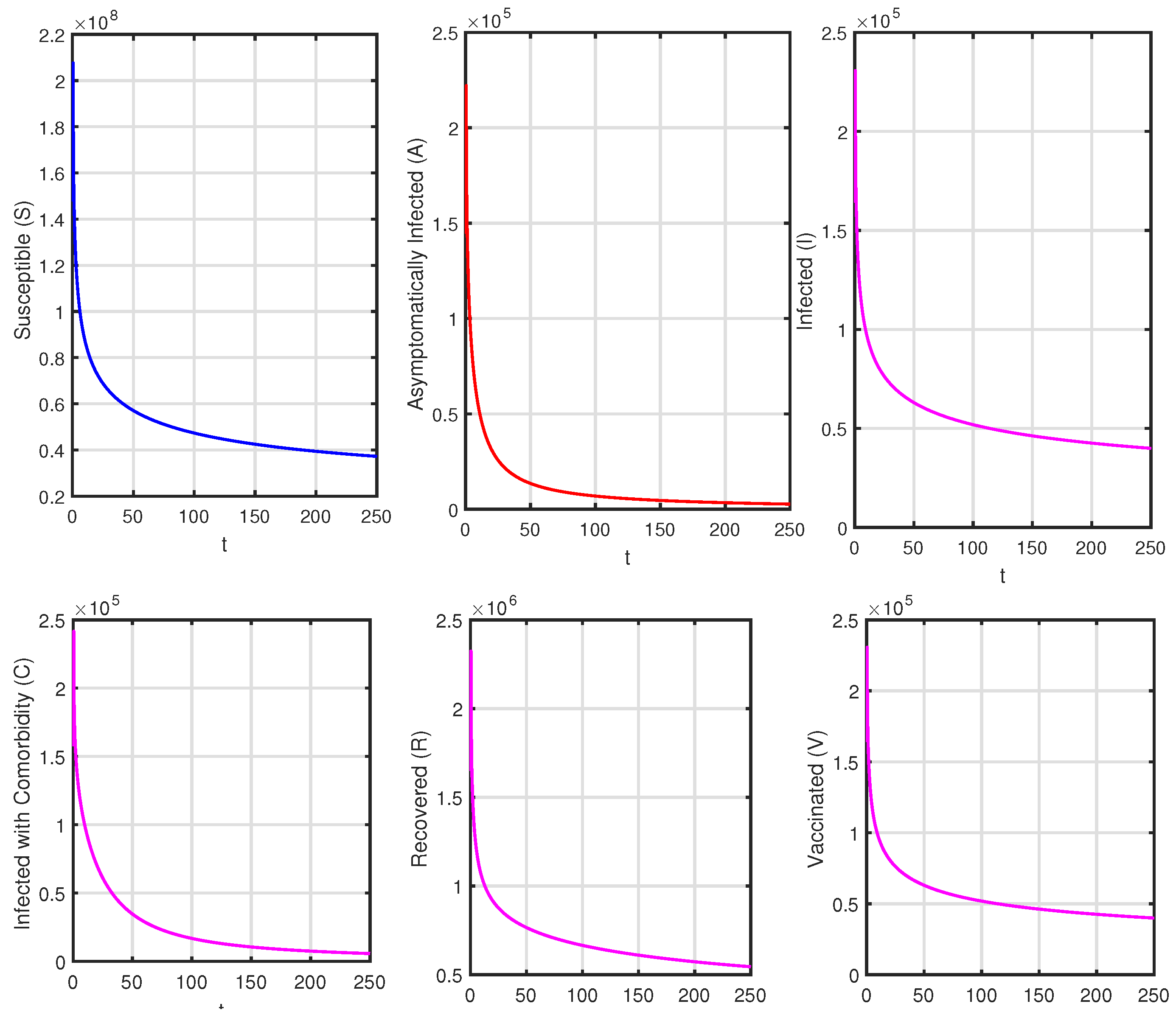
Figure 11,
Figure 12 and
Figure 13 depict the time series of state variables, optimal control variables, and optimal cost for longer time periods (t = 250 days).
7. Conclusions
In real-world dynamical processes, such as epidemic spread, fractional calculus plays a critical role. We looked into the emergence of a modified SAVICR epidemic model that included memory effects. The co-morbidity and vaccinated classes have been added. Our model accurately simulates the reality of the West Bengal (India) outbreak and predicts the daily number of confirmed COVID-19 cases. The size of the infected population with co-morbidity is important in estimating the number of Intensive Care Units (ICU) needed. Our proposed model is compatible with other places/countries. The order of derivative can differ from region to region. If we vary the order of derivatives while keeping other parametric values fixed, the results will be different (
Figure 3). This demonstrates that the order of derivative is important in system simulation (1). We can see that the number of people with a co-morbidity and asymptomatic population decreases significantly at 200 days by conducting long-term simulation (
Figure 10). Finally, it has shown that the optimal control strategy is implementing social distancing policies and lowering economic costs by combining non-pharmaceutical interventions with vaccination.
Our work reveals the validity of the proposed model in West Bengal (India) scenario. The main advantage of this model is that it is simple and fits with real data for long time periods, as mentioned in
Figure 3 (1 June 2021 to 20 October 2021). Theoretically, it is established that the endemic equilibrium point is not asymptotically stable, which guarantees the extinction of the current pandemic (Theorem 6). One disadvantage of this model is that the model values and real data of the total infected population differ too much in the initial stage; further, vaccinated people may be affected by COVID-19, which is a factor not included in our model. It is observed that the number of infected individuals can be controlled by proper vaccination and NPI, and the strategies proposed to control COVID-19 through proper implementation of NPI and vaccination events can contribute to our society. Further, the study of the pulsed immunization strategy remains within the scope of our future studies. There are several fractional-order systems, namely Caputo–Fabrizio, Caputo–Hadamard, Atangana–Baleanu–Caputo derivative, and Reisz derivative, which are extensively used for studying epidemiological and biological systems. We wish to conduct a comparative study of the proposed model in different fractional-order frameworks.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}