
Fixed-Time Synchronization of Neural Networks Based on Quantized Intermittent Control for Image Protection

Abstract
:1. Introduction
2. Preliminaries and System Description
3. Main Results
4. Numerical Simulation: Synchronized and Applied to Image Encryption
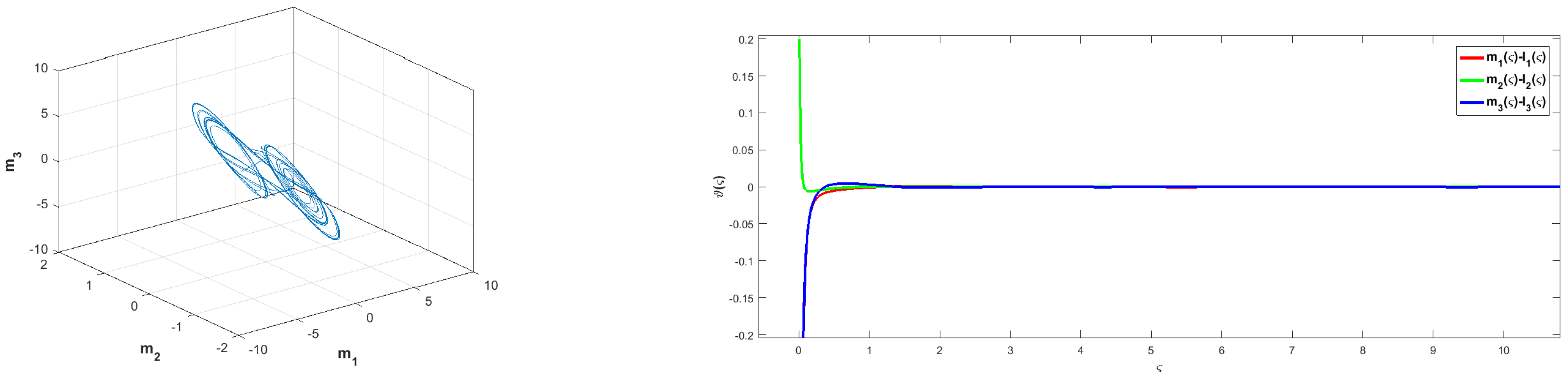
4.1. FIXTS of Neural Networks via Quantized Intermittent Control
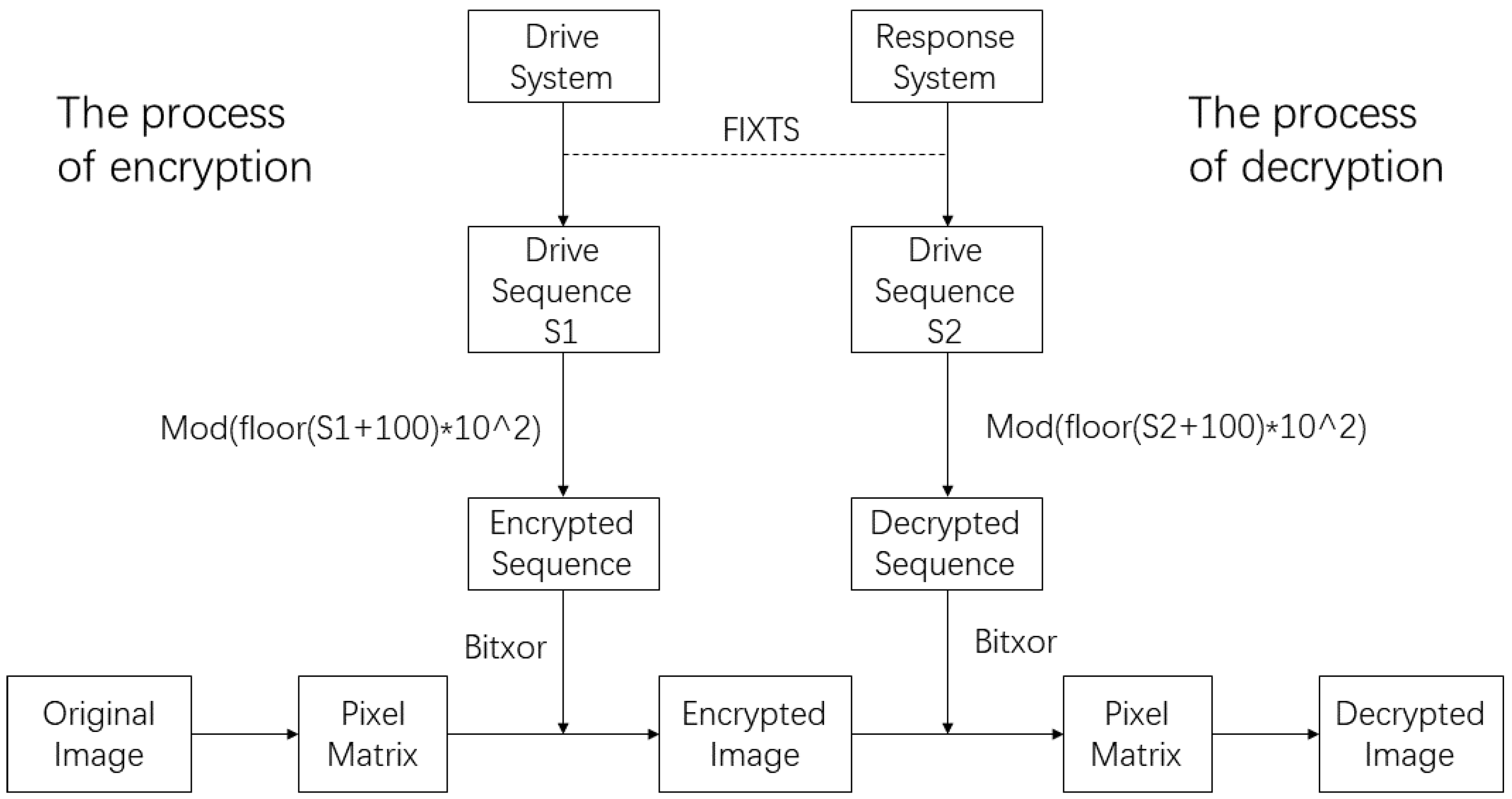
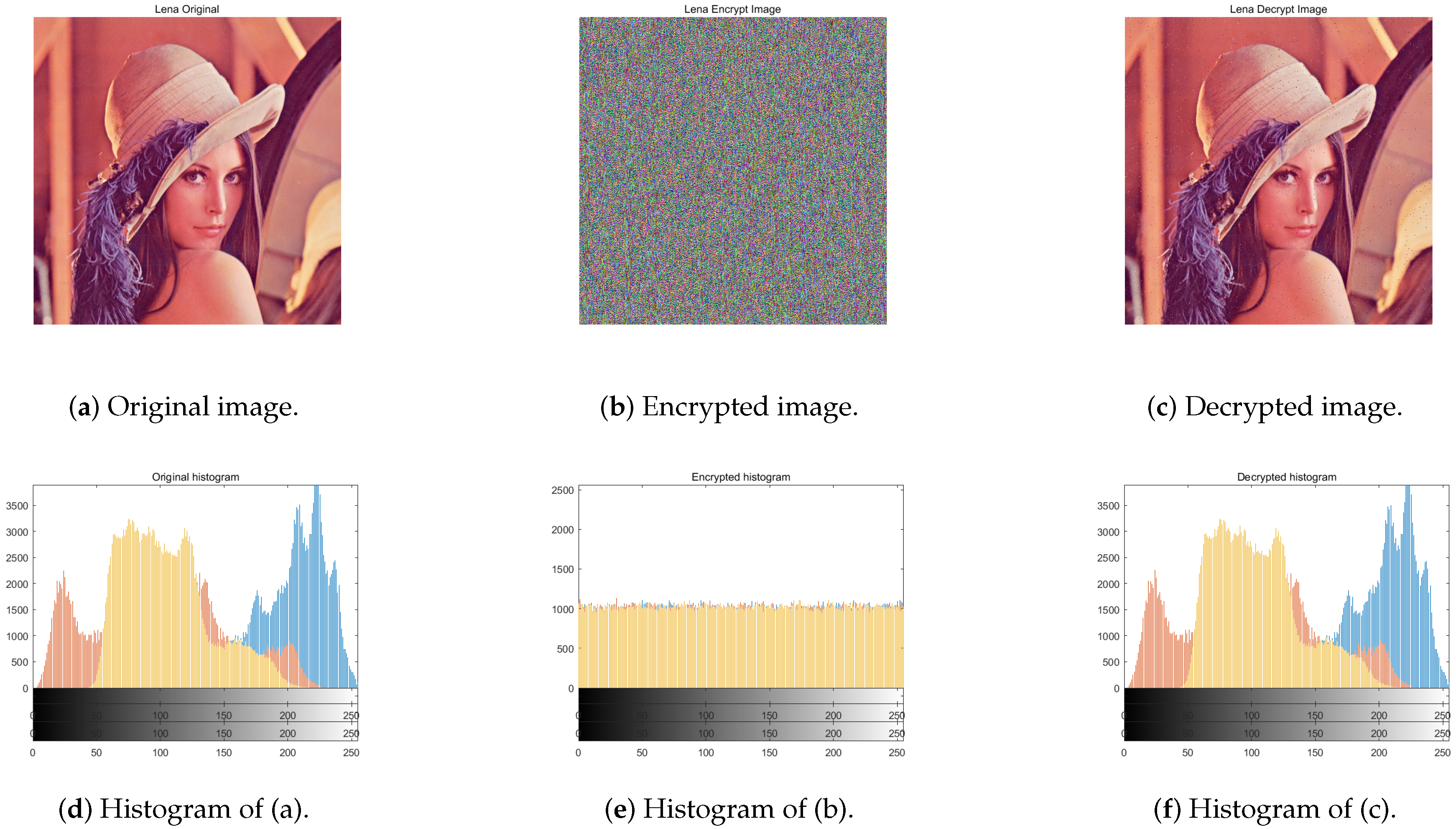
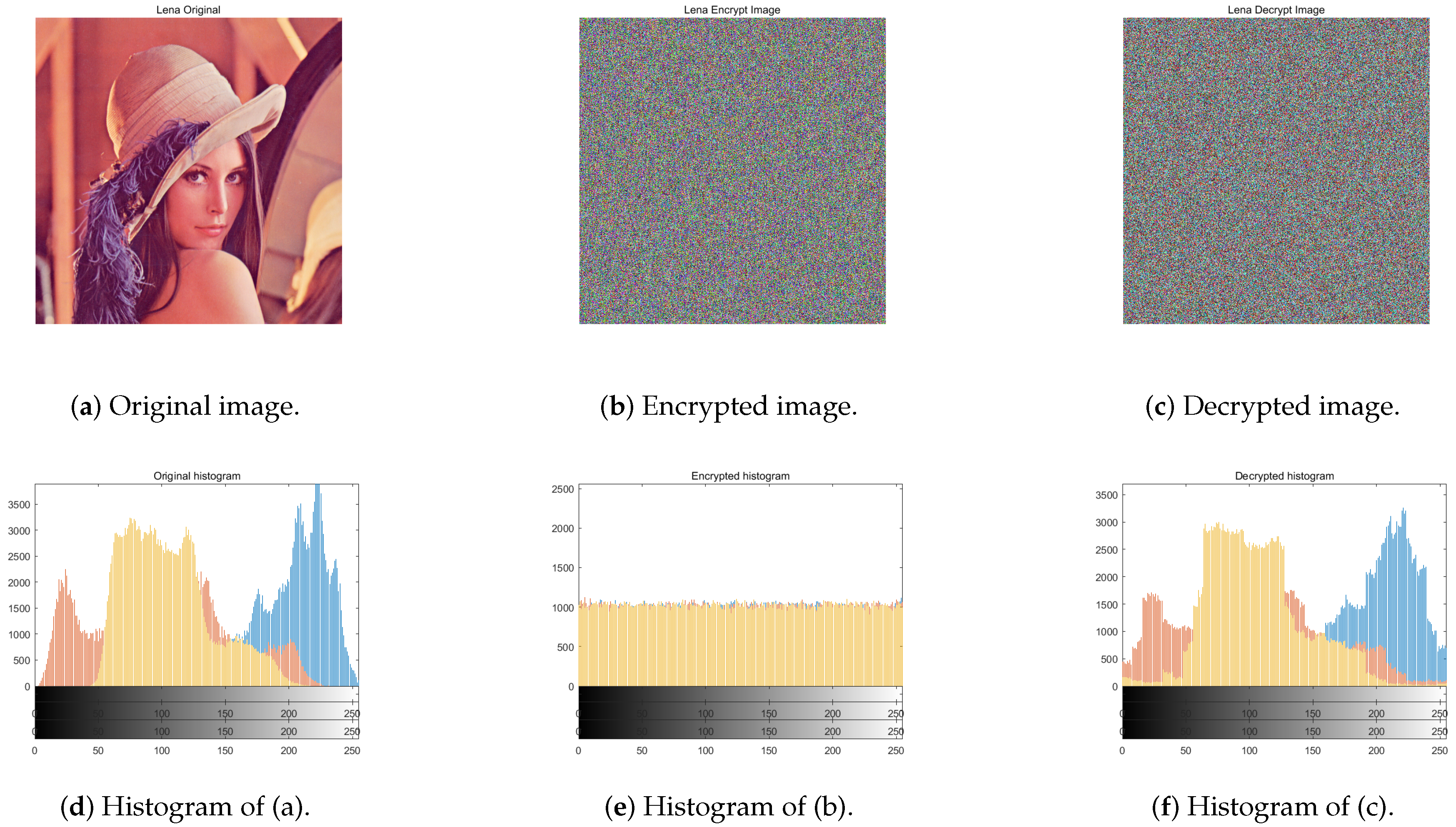
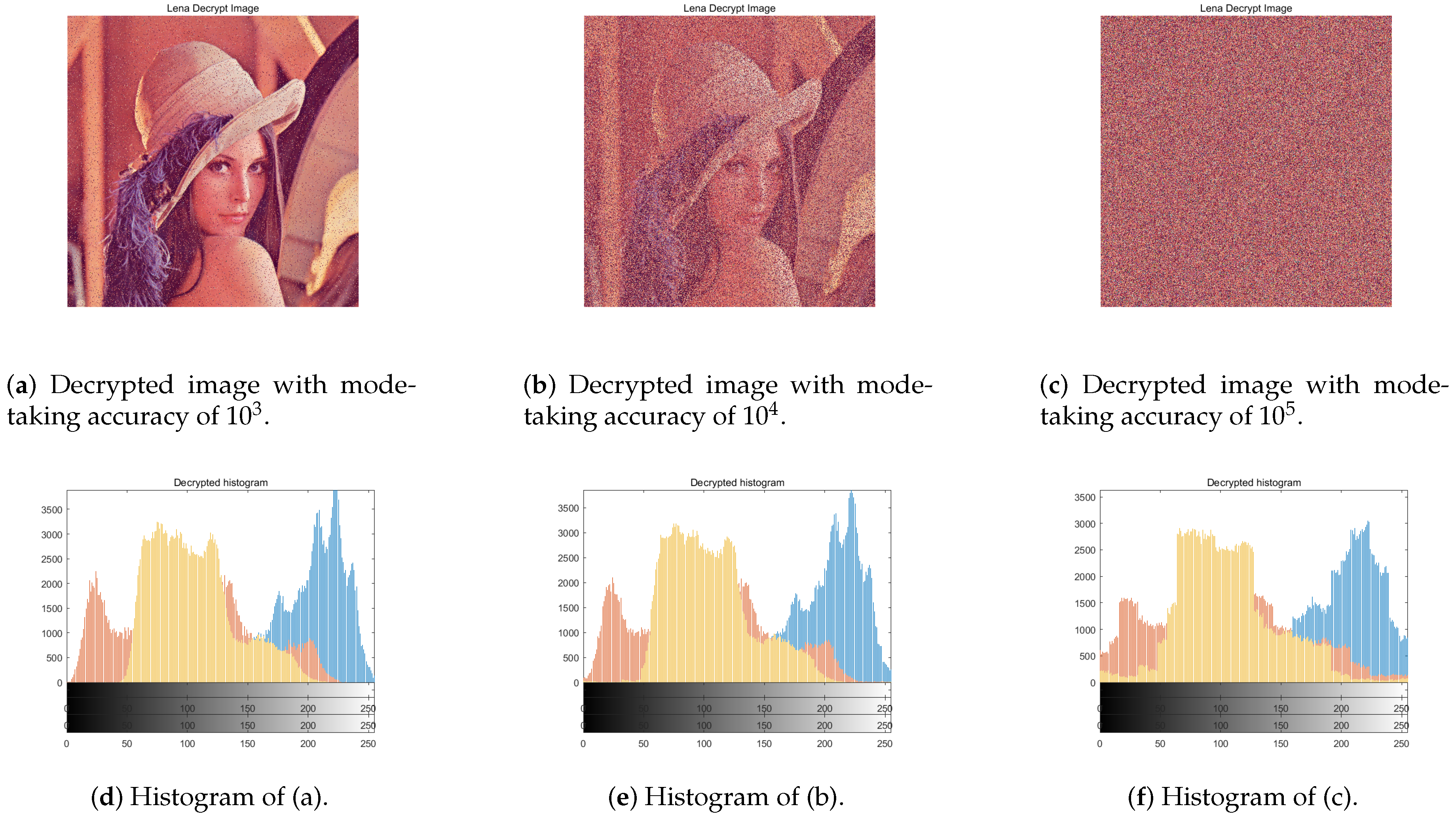
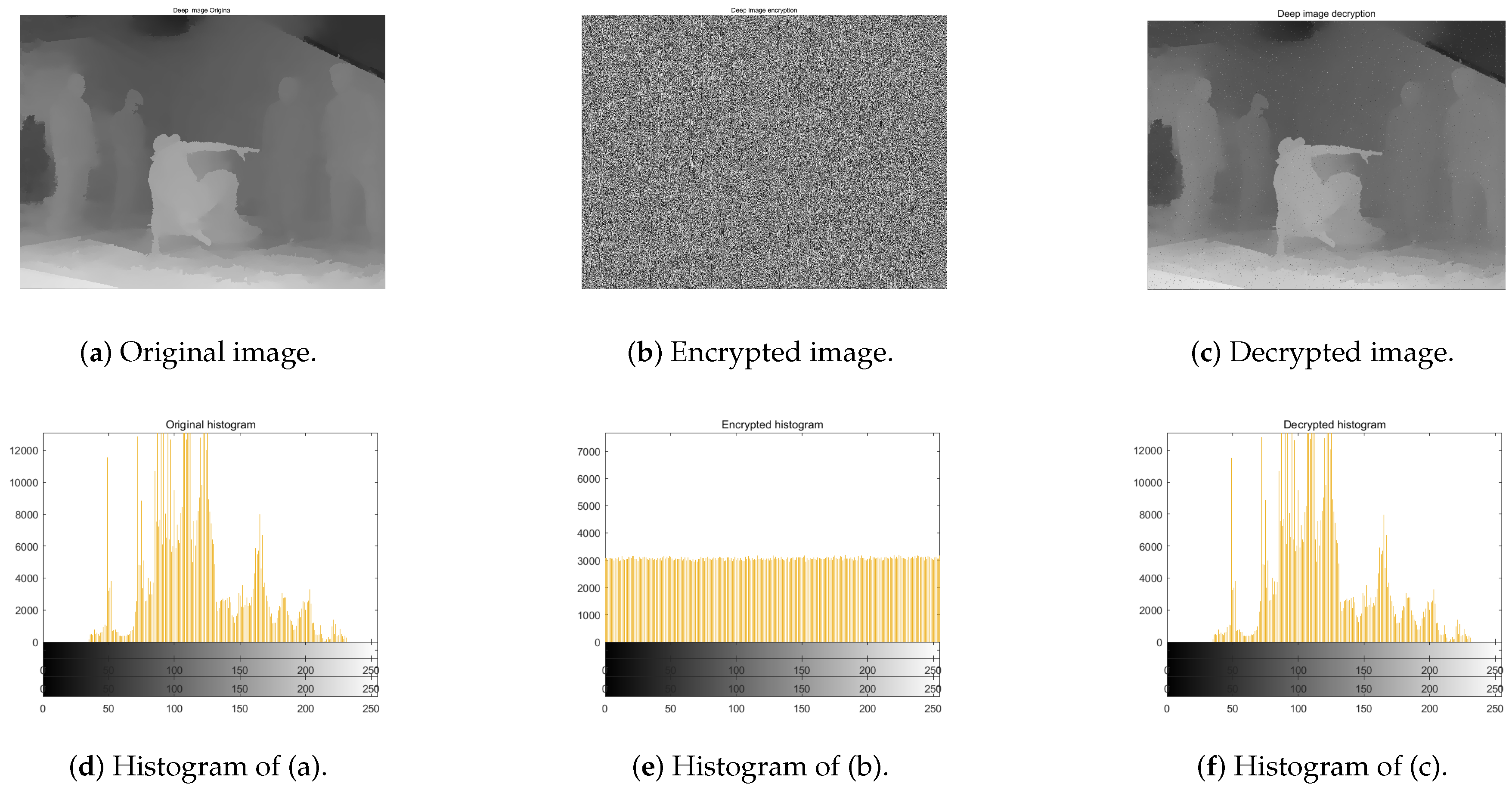
4.2. Application of FIXTS to Image Protection
| Algorithm 1 Diffusion processing(eg:image ) |
|
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gossett, E. Big Data: A Revolution That Will Transform How We Live, Work, and Think. Perspect. Sci. Christ. Faith 2015, 67, 156–158. [Google Scholar]
- Chen, M.; Li, Y.; Luo, X.; Wang, W.; Wang, L.; Zhao, W. A Novel Human Activity Recognition Scheme for Smart Health Using Multilayer Extreme Learning Machine. IEEE Internet Things J. 2019, 6, 1410–1418. [Google Scholar] [CrossRef]
- Xu, L.; He, W.; Li, S. Internet of Things in Industries: A Survey. IEEE Trans. Ind. Inform. 2014, 10, 2233–2243. [Google Scholar] [CrossRef]
- Tutueva, A.V.; Nepomuceno, E.G.; Karimov, A.I.; Andreev, V.S.; Butusov, D.N. Adaptive chaotic maps and their application to pseudo-random numbers generation. Chaos Solitons Fractals 2020, 133, 109615. [Google Scholar] [CrossRef]
- Chai, X.; Gan, Z.; Chen, Y.; Zhang, Y. A visually secure image encryption scheme based on compressive sensing. Signal Process. 2017, 134, 35–51. [Google Scholar] [CrossRef] [Green Version]
- Hua, Z.; Zhou, Y.; Huang, H. Cosine-transform-based chaotic system for image encryption. Inf. Sci. 2019, 480, 403–419. [Google Scholar] [CrossRef]
- Vaseghi, B.; Mobayen, S.; Hashemi, S.S.; Fekih, A. Fast reaching finite time synchronization approach for chaotic systems with application in medical image encryption. IEEE Access 2021, 9, 25911–25925. [Google Scholar] [CrossRef]
- Hua, Z.; Jin, F.; Xu, B.; Huang, H. 2D Logistic-Sine-coupling map for image encryption. Signal Process. 2018, 149, 148–161. [Google Scholar] [CrossRef]
- Chai, X.; Gan, Z.; Yuan, K.; Chen, Y.; Liu, X. A novel image encryption scheme based on DNA sequence operations and chaotic systems. Neural Comput. Appl. 2017, 31, 219–237. [Google Scholar] [CrossRef]
- Yuan, M.; Wang, W.; Wang, Z.; Luo, X.; Kurths, J. Exponential Synchronization of Delayed Memristor-Based Uncertain Complex-Valued Neural Networks for Image Protection. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 151–165. [Google Scholar] [CrossRef] [PubMed]
- Rajchakit, G.; Sriraman, R.; Lim, C.P.; Sam-ang, P.; Hammachukiattikul, P. Synchronization in Finite-Time Analysis of Clifford-Valued Neural Networks with Finite-Time Distributed Delays. Mathematics 2021, 9, 1163. [Google Scholar] [CrossRef]
- Shen, J.; Cao, J. Finite-time synchronization of coupled neural networks via discontinuous controllers. Cogn. Neurodyn. 2011, 5, 373–385. [Google Scholar] [CrossRef] [Green Version]
- Zheng, M.; Li, L.; Peng, H.; Xiao, J.; Yang, Y.; Zhao, H. Finite-time projective synchronization of memristor-based delay fractional-order neural networks. Nonlinear Dyn. 2017, 89, 2641–2655. [Google Scholar] [CrossRef]
- Huang, J.; Li, C.; Huang, T.; He, X. Finite-time lag synchronization of delayed neural networks. Neurocomputing 2014, 139, 145–149. [Google Scholar] [CrossRef]
- Ning, B.; Han, Q. Prescribed Finite-Time Consensus Tracking for Multiagent Systems With Nonholonomic Chained-Form Dynamics. IEEE Trans. Autom. Control 2019, 64, 1686–1693. [Google Scholar] [CrossRef]
- Ning, B.; Han, Q.; Zuo, Z. Distributed Optimization for Multiagent Systems: An Edge-Based Fixed-Time Consensus Approach. IEEE Trans. Cybern. 2019, 49, 122–132. [Google Scholar] [CrossRef] [PubMed]
- Polyakov, A. Nonlinear Feedback Design for Fixed-Time Stabilization of Linear Control Systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Yang, R.; Liu, Z. Adaptive tracking control for a class of nonlinear non-strict-feedback systems. Nonlinear Dyn. 2017, 88, 1537–1550. [Google Scholar] [CrossRef]
- Hai, X.; Ren, G.; Yu, Y.; Xu, C. Adaptive Pinning Synchronization of Fractional Complex Networks with Impulses and Reaction–Diffusion Terms. Mathematics 2019, 7, 405. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.; Chen, G.; Lu, J.; Kurths, J. Synchronization via Pinning Control on General Complex Networks. SIAM J. Control Optim. 2013, 51, 1395–1416. [Google Scholar] [CrossRef]
- Nguyen, D.M.; Bahri, I.; Krebs, G.; Berthelot, E.; Marchand, C. Vibration study of the intermittent control for a switched reluctance machine. Math. Comput. Simul. 2019, 158, 308–325. [Google Scholar] [CrossRef]
- Duan, P. Stabilization of Stochastic Differential Equations Driven by G-Brownian Motion with Aperiodically Intermittent Control. Mathematics 2021, 9, 988. [Google Scholar] [CrossRef]
- Meng, X.; Kao, Y.; Gao, C.; Jiang, B. Projective synchronization of variable-order systems via fractional sliding mode control approach. IET Control Theory Appl. 2020, 14, 12–18. [Google Scholar] [CrossRef]
- Xu, C.; Yang, X.; Lu, J.; Feng, J.; Alsaadi, F.E.; Hayat, T. Finite-Time Synchronization of Networks via Quantized Intermittent Pinning Control. IEEE Trans. Cybern. 2018, 48, 3021–3027. [Google Scholar] [CrossRef]
- Zhang, T.; Jian, J. Quantized intermittent control tactics for exponential synchronization of quaternion-valued memristive delayed neural networks. ISA Trans. 2021. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Wang, C.; Li, W. Generalized quantized intermittent control with adaptive strategy on finite-time synchronization of delayed coupled systems and applications. Nonlinear Dyn. 2019, 95, 1361–1377. [Google Scholar] [CrossRef]
- Mei, J.; Jiang, M.; Wang, B.; Long, B. Finite-time parameter identification and adaptive synchronization between two chaotic neural networks. J. Frankl. Inst. 2013, 350, 1617–1633. [Google Scholar] [CrossRef]
- Gan, Q.; Xiao, F.; Sheng, H. Fixed-time outer synchronization of hybrid-coupled delayed complex networks via periodically semi-intermittent control. J. Frankl. Inst. 2019, 356, 6656–6677. [Google Scholar] [CrossRef]
- Liu, S.; Chen, C.; Peng, H. Fixed-Time Synchronization of Neural Networks with Discrete Delay. Math. Probl. Eng. 2020, 2020, 7830547. [Google Scholar] [CrossRef]
- Sui, X.; Yang, Y.; Wang, F.; Zhang, L. Finite-time anti-synchronization of time-varying delayed neural networks via feedback control with intermittent adjustment. Adv. Differ. Equ. 2017, 2017, 229. [Google Scholar] [CrossRef] [Green Version]
- Rajchakit, G.; Kaewmesri, P.; Chanthorn, P.; Sriraman, R.; Samidurai, R.; Lim, C.P. Stochastic Memristive Quaternion-Valued Neural Networks with Time Delays: An Analysis on Mean Square Exponential Input-to-State Stability. Mathematics 2020, 8, 815. [Google Scholar]
- Li, X.D.; Chow, T.W.S.; Ho, J.K.L. 2-D system theory based iterative learning control for linear continuous systems with time delays. IEEE Trans. Circuits Syst. I Regul. Pap. 2005, 52, 1421–1430. [Google Scholar]
- Mei, J.; Jiang, M.; Xu, W.; Wang, B. Finite-time synchronization control of complex dynamical networks with time delay. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 2462–2478. [Google Scholar] [CrossRef]
- Chua, L.O. The double scroll. In Proceedings of the 1985 24th IEEE Conference on Decision and Control, Fort Lauderdale, FL, USA, 11–13 December 1985. [Google Scholar]
- Wei, T.; Lin, P.; Wang, Y.; Wang, L. Stability of stochastic impulsive reaction–diffusion neural networks with S-type distributed delays and its application to image encryption. Neural Netw. 2019, 116, 35–45. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kar, M.; Mandal, M.; Nandi, D. RGB image encryption using hyper chaotic system. In Proceedings of the IEEE 2017 Third International Conference on Research in Computational Intelligence and Communication Networks (ICRCICN), Kolkata, India, 3–5 November 2017; pp. 354–359. [Google Scholar]
- Kadir, A.; Hamdulla, A.; Guo, W.Q. Color image encryption using skew tent map and hyper chaotic system of 6th-order CNN. Optik 2014, 125, 1671–1675. [Google Scholar] [CrossRef]
- Mazloom, S.; Eftekhari-Moghadam, A.M. Color image encryption based on coupled nonlinear chaotic map. Chaos Solitons Fractals 2009, 42, 1745–1754. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Direction | Chaos Map | R | G | B |
|---|---|---|---|---|
| Original image | 0.98920 | 0.98230 | 0.95770 | |
| Horizontal | Encrypted image | 0.00420 | 0.00260 | −0.00240 |
| Decryptedl image | 0.97080 | 0.96380 | 0.93960 | |
| Original image | 0.96980 | 0.96890 | 0.91810 | |
| Vertical | Encrypted image | −0.00230 | −0.0029 | −0.00340 |
| Decryptedl image | 0.95160 | 0.93660 | 0.89960 | |
| Original image | 0.97980 | 0.95550 | 0.93290 | |
| Diagonal | Encrypted image | 0.00210 | −0.00043 | 0.00023 |
| Decryptedl image | 0.96230 | 0.95070 | 0.91320 |
| Algorithms | Horizontal | Vertical | Diagonal |
|---|---|---|---|
| Our algorithm | 0.00210 | −0.00043 | 0.00023 |
| Ref. [35] | 0.01180 | 0.01810 | 0.03670 |
| Ref. [36] | −0.00430 | −0.00370 | 0.01960 |
| Ref. [10] | 0.00210 | −0.00140 | −0.00020 |
| Ref. [37] | 0.00380 | −0.00410 | −0.00360 |
| Ref. [38] | −0.01680 | 0.04450 | −0.00220 |
| Image Types | Size | File Size (KB) | Encryption Process Time (s) | Decryption Process Time (s) |
|---|---|---|---|---|
| Grayscale image of ‘lena.tiff’ | 512 × 512 | 480 | 0.637100 | 0.522666 |
| color image of ‘lena.tiff’ | 512 × 512 | 768 | 1.909023 | 1.485432 |
| Grayscale image of ‘onion.tiff’ | 198 × 135 | 31 | 0.072459 | 0.056197 |
| color image of ‘onion.tiff’ | 198 × 135 | 44 | 0.210034 | 0.162479 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Xiao, L.; Huang, J.; Yang, J. Fixed-Time Synchronization of Neural Networks Based on Quantized Intermittent Control for Image Protection. Mathematics 2021, 9, 3086. https://doi.org/10.3390/math9233086
Yang W, Xiao L, Huang J, Yang J. Fixed-Time Synchronization of Neural Networks Based on Quantized Intermittent Control for Image Protection. Mathematics. 2021; 9(23):3086. https://doi.org/10.3390/math9233086
Chicago/Turabian StyleYang, Wenqiang, Li Xiao, Junjian Huang, and Jinyue Yang. 2021. "Fixed-Time Synchronization of Neural Networks Based on Quantized Intermittent Control for Image Protection" Mathematics 9, no. 23: 3086. https://doi.org/10.3390/math9233086
APA StyleYang, W., Xiao, L., Huang, J., & Yang, J. (2021). Fixed-Time Synchronization of Neural Networks Based on Quantized Intermittent Control for Image Protection. Mathematics, 9(23), 3086. https://doi.org/10.3390/math9233086