Generalized Developable Cubic Trigonometric Bézier Surfaces




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Definition and Properties of Cubic Trigonometric Bézier Curves
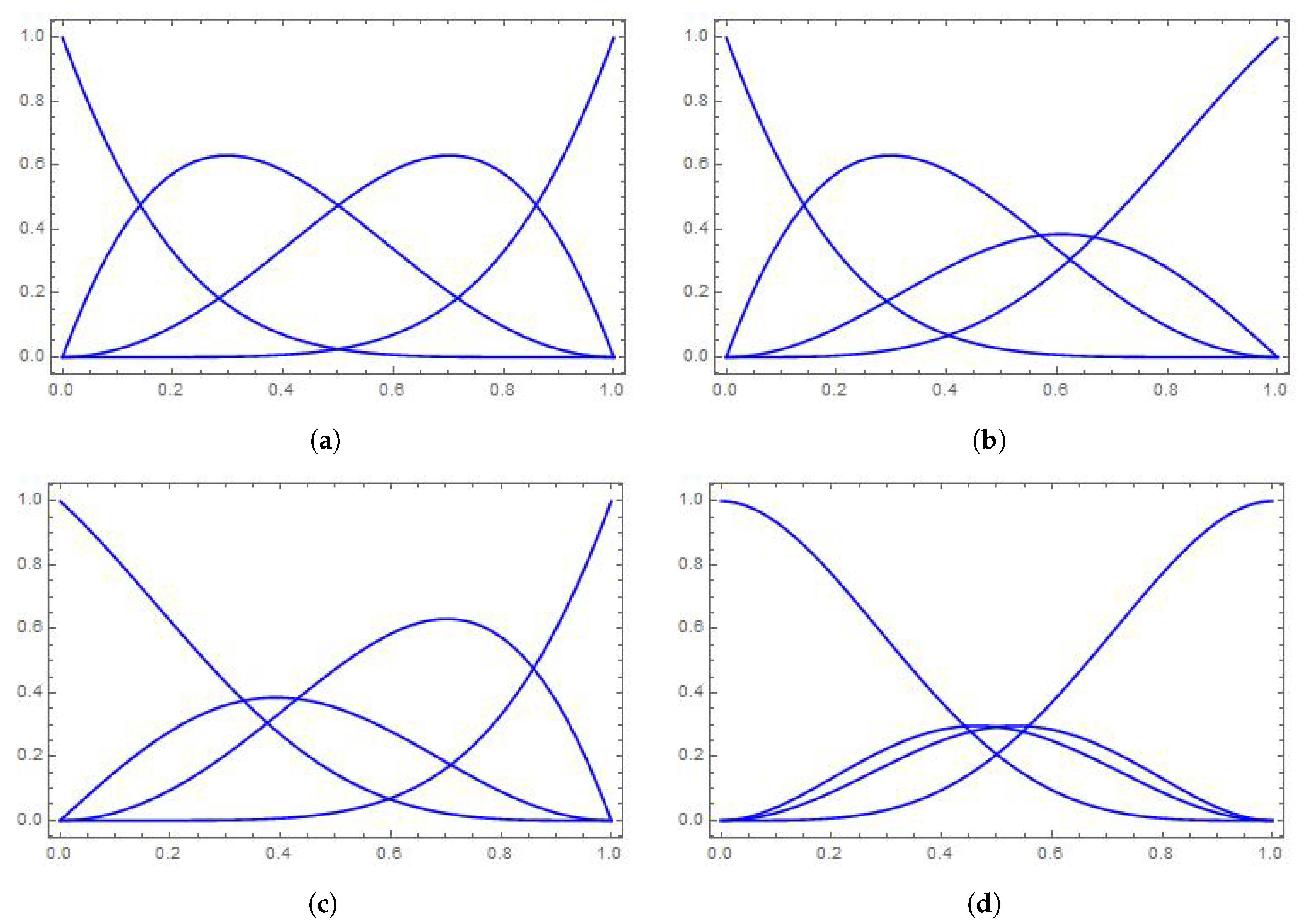
2.1. Cubic Trigonometric Bézier Basis Functions
- (a)
- Non-negativity: .
- (b)
- Partition of unity: .
- (c)
- Monotonicity: with the given parameter u, and are monotonically decreasing while and are monotonically increasing for the shape parameters and , respectively.
- (d)
- Symmetry: for .
2.2. Construction of CT-Bézier Curve
- (a)
- Boundary properties:,,,,,
- (b)
- Symmetry: and define the same CT-Bézier curve in different parameterizations, i.e.,= , , .
- (c)
- Geometric invariance: The CT-Bézier curve has a shape that is independent of the selection of the coordination, i.e., Equation (2) satisfies the following two equations:= ,= .where q is an arbitrary vector in or and T is an arbitrary matrix, or 3.
- (d)
- Convex hull property: The entire segment of the CT-Bézier curve must lie inside the control polygon.
3. Construction of GDCT-Bézier Surfaces
3.1. Dual Generation of Single-Parameter Family of Planes
3.2. Generalized Enveloping Developable CT-Bézier Surface
3.3. Generalized Spine Curve Developable CT-Bézier surface
3.4. Developable Surface Interpolating Geodesic CT-Bézier Curve with Parameters
3.5. Analysis Properties of the GDCT-Bézier Surface
4. Continuity Conditions between GDCT-Bézier Surfaces
4.1. The Continuity Conditions of GDCT-Bézier Surfaces
4.2. Farin–Boehm Continuity Conditions of GDCT-Bézier Surfaces
4.3. Beta Continuity Conditions of GDCT-Bézier Surfaces
5. Design Examples of GDCT-Bézier Surface
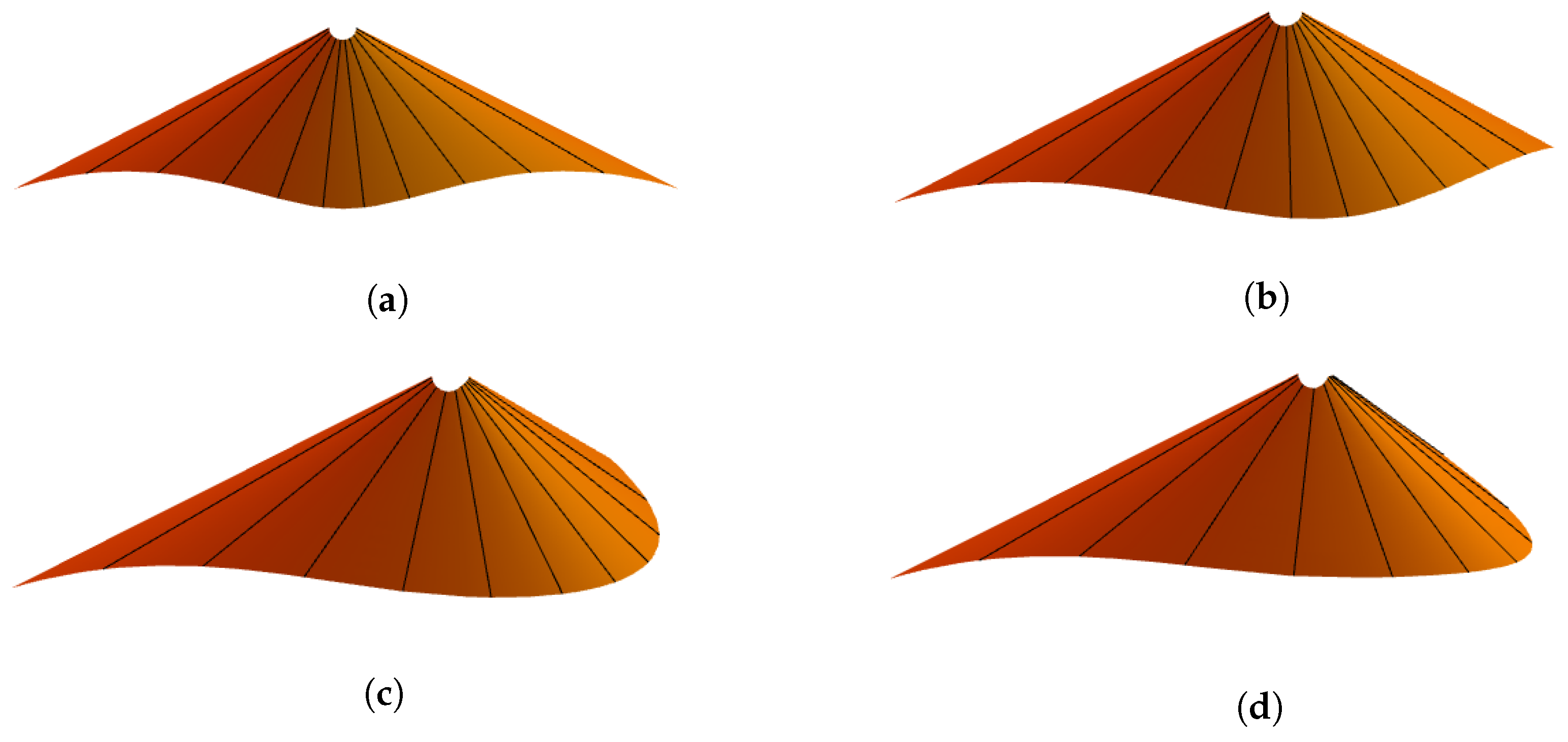
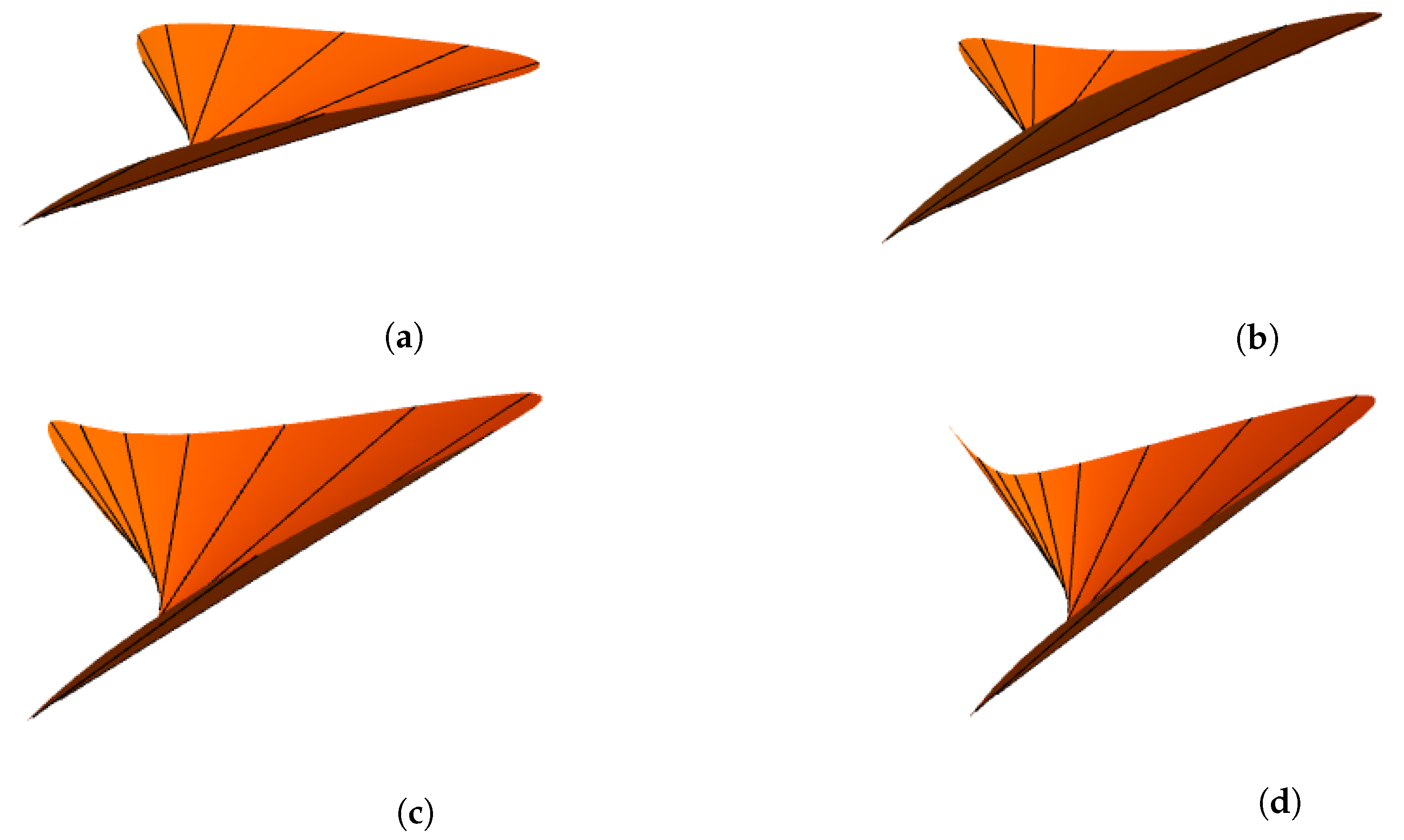
5.1. Examples of Enveloping GDCT-Bézier Surfaces
- When modifying the value of and keeping unchanged, the generator retains the same length and location. However, the length of the generator becomes longer when we increase the value of , but its position remains unchanged.
- If the value of shape parameter is constant and is adjusted, the generator retains the same length and position. However, the position of generator also remains unchanged, but its length increases when we increase the value of .
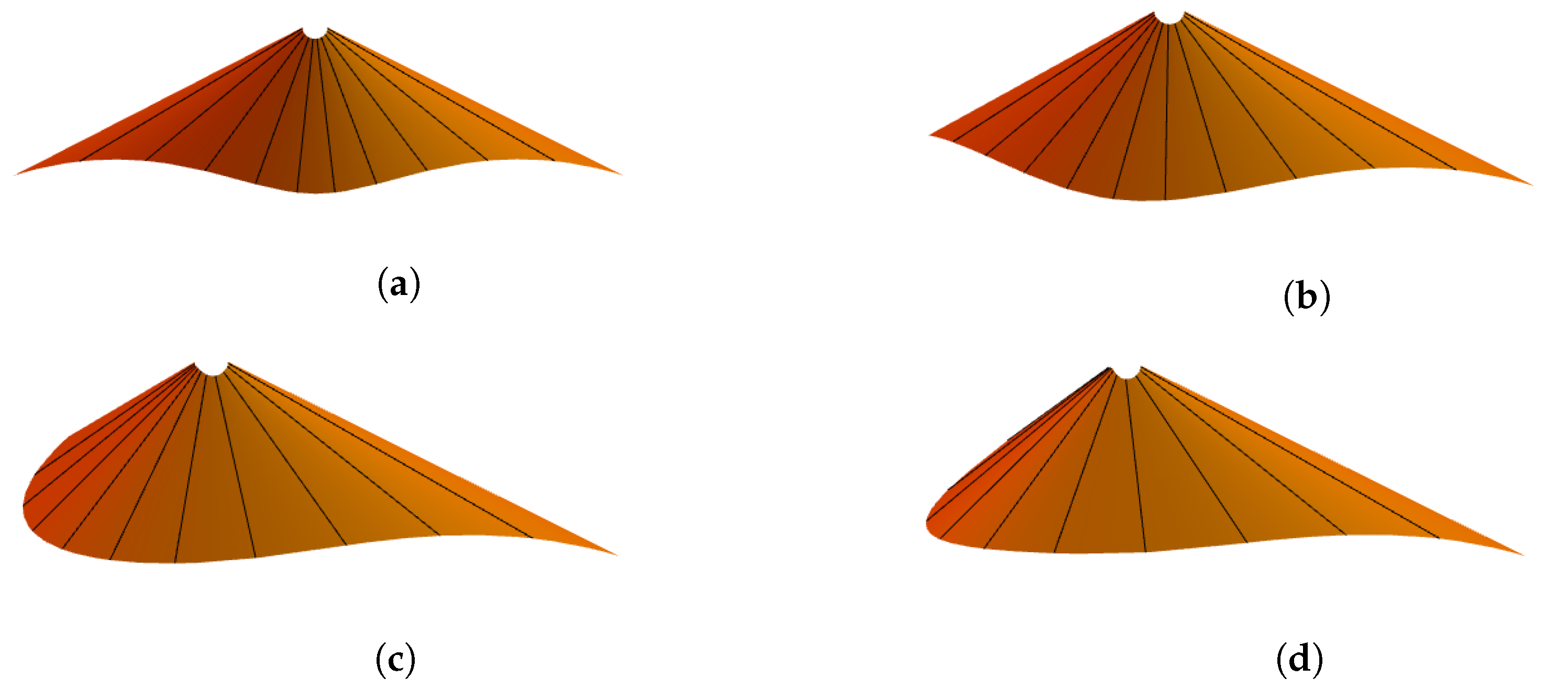
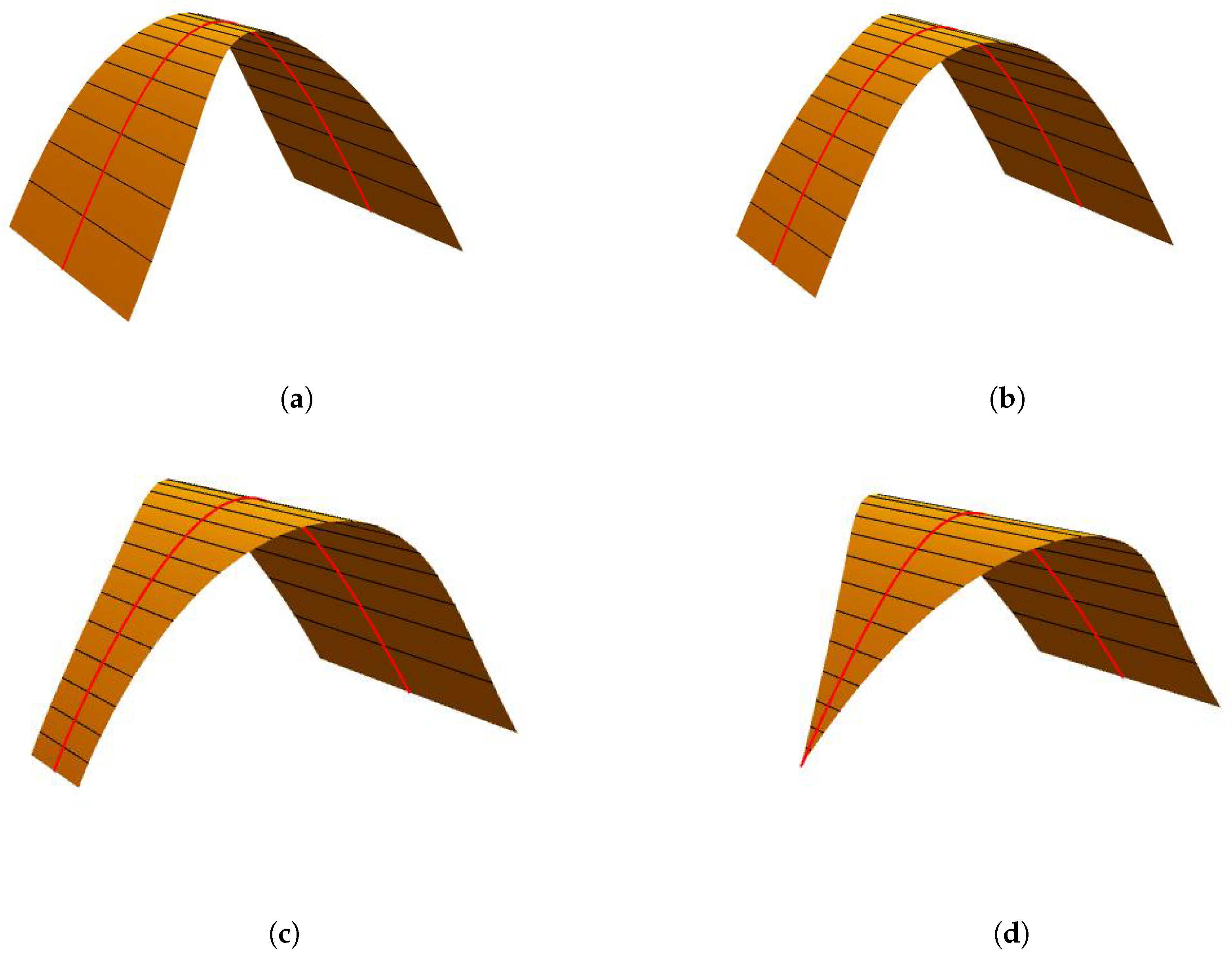
5.2. Examples of Spine Curve GDCT-Bézier Surfaces
- When modifying the value of , and keeping unchanged, the generator retains the same length and location. However, the length of the generator becomes shorter when we increase the value of , but its position remains unchanged.
- If the value of shape parameter is constant and is adjusted, the generator retains the same length. However, the length of the generator becomes shorter when we increase the value of , but its position remains unchanged.
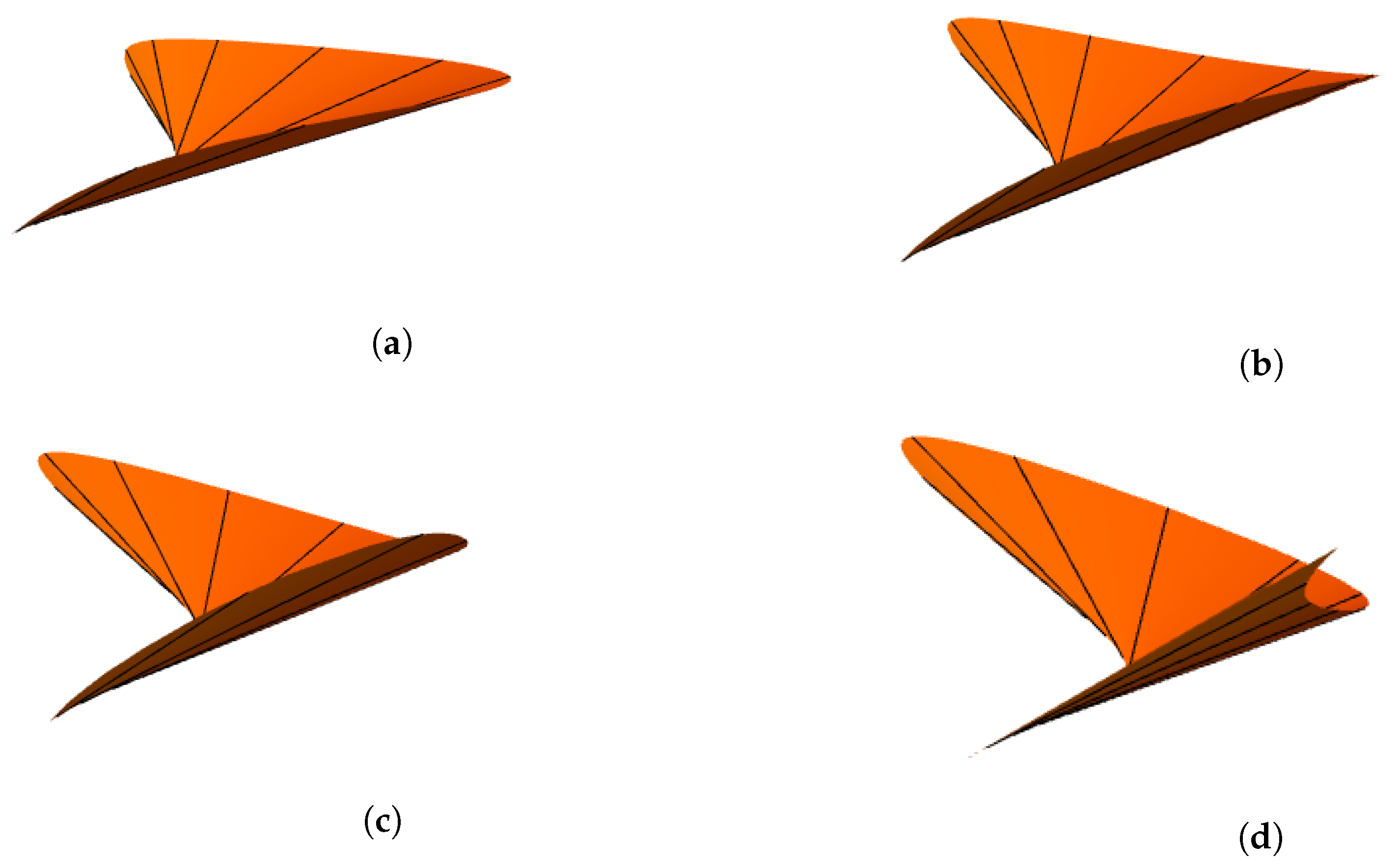
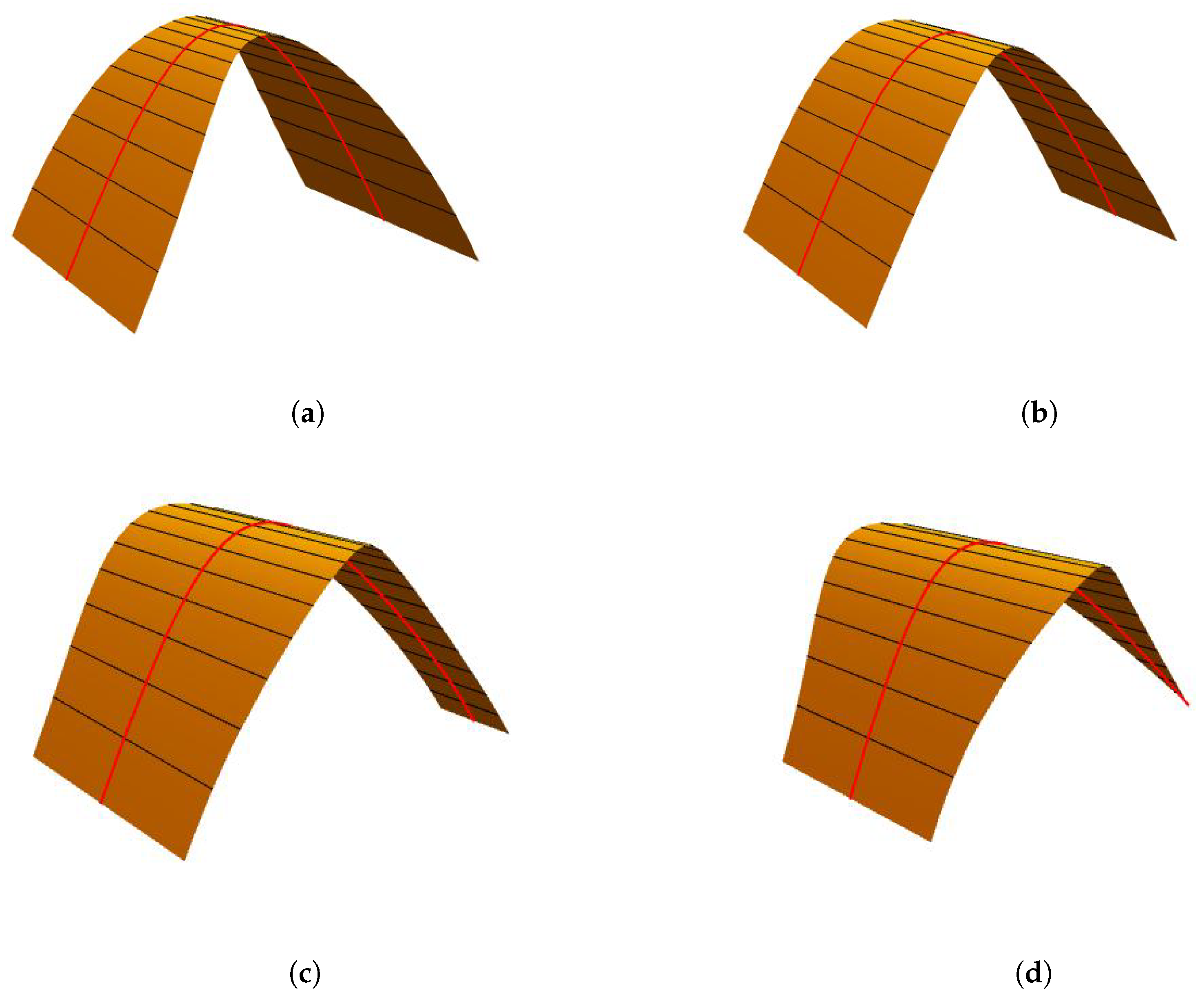
5.3. Example of Developable Surface Interpolating Geodesic Cubic Trigonometric Bézier Curve with Parameters
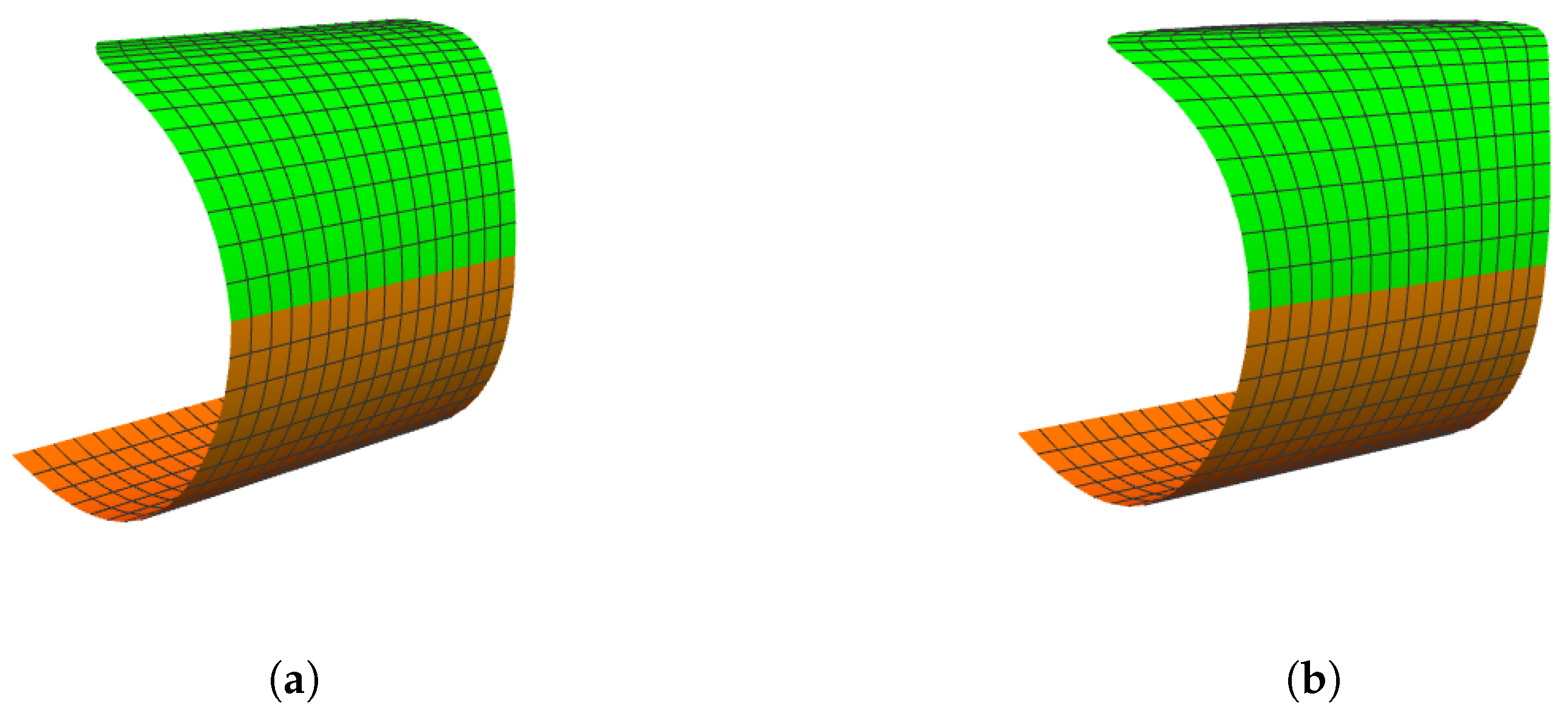
5.4. Example of Smooth Continuity Between Two Adjacent GDCT-Bézier Surfaces
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, Y.; Pottmann, H.; Wallner, J.; Yang, Y.L.; Wang, W. Geometric modeling with conical meshes and developable surfaces. ACM Trans. Graph. 2006, 25, 681–689. [Google Scholar] [CrossRef]
- Tang, C.; Bo, P.; Wallner, J.; Pottmann, H. Interactive design of developable surfaces. ACM Trans. Graph. (TOG) 2016, 35, 1–12. [Google Scholar] [CrossRef]
- Tang, K.; Wang, C.C. Modeling developable folds on a strip. J. Comput. Inf. Sci. Eng. 2005, 5, 35–47. [Google Scholar] [CrossRef] [Green Version]
- Ferris, L.W. A standard series of developable surfaces. Mar. Technol. SNAME News 1968, 5, 52–62. [Google Scholar]
- Frey, W.; Bindschadler, D. Computer Aided Design of a Class of Developable Bézier Surfaces; General Motors R&D Publication: Detroit, The Netherlands, 1993. [Google Scholar]
- Chu, C.H.; Wang, C.C.; Tsai, C.R. Computer aided geometric design of strip using developable Bézier patches. Comput. Ind. 2008, 59, 601–611. [Google Scholar] [CrossRef]
- Nguyen, H.; Ko, S.L. A mathematical model for simulating and manufacturing ball end mill. Comput. Aided Des. 2014, 50, 16–26. [Google Scholar] [CrossRef]
- Weiss, G.; Furtner, P. Computer-aided treatment of developable surfaces. Comput. Graph. 1988, 12, 39–51. [Google Scholar] [CrossRef]
- Chen, M.; Tang, K. G2 quasi-developable Bezier surface interpolation of two space curves. Comput. Aided Des. 2013, 45, 1365–1377. [Google Scholar] [CrossRef]
- Peternell, M. Developable surface fitting to point clouds. Comput. Aided Geom. Des. 2004, 21, 785–803. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, G. A new method for designing a developable surface utilizing the surface pencil through a given curve. Prog. Nat. Sci. 2008, 18, 105–110. [Google Scholar] [CrossRef]
- Li, C.Y.; Wang, R.H.; Zhu, C.G. Design and G1 connection of developable surfaces through Bézier geodesics. Appl. Math. Comput. 2011, 218, 3199–3208. [Google Scholar] [CrossRef]
- Chu, C.H.; Chen, J.T. Geometric design of developable composite Bézier surfaces. Comput. Aided Des. Appl. 2004, 1, 531–539. [Google Scholar] [CrossRef] [Green Version]
- Aumann, G. Interpolation with developable Bézier patches. Comput. Aided Geom. Des. 1991, 8, 409–420. [Google Scholar] [CrossRef]
- Lang, J.; Röschel, O. Developable (1, n)-Bézier surfaces. Comput. Aided Geom. Des. 1992, 9, 291–298. [Google Scholar] [CrossRef]
- Pottmann, H.; Farin, G. Developable rational Bézier and B-spline surfaces. Comput. Aided Geom. Des. 1995, 12, 513–531. [Google Scholar] [CrossRef]
- Bodduluri, R.; Ravani, B. Design of developable surfaces using duality between plane and point geometries. Comput. Aided Des. 1993, 25, 621–632. [Google Scholar] [CrossRef]
- Bobenko, A.I.; Lutz, C.; Pottmann, H.; Techter, J. Laguerre Geometry in Space Forms and Incircular Nets. 2019. Available online: https://www.discretization.de/media/filer_public/a4/f3/a4f33445-83b2-46b0-a6c2-a34e1a463531/laguerre.pdf (accessed on 21 December 2020).
- Peternell, M.; Pottmann, H. A Laguerre geometric approach to rational offsets. Comput. Aided Geom. Des. 1998, 15, 223–249. [Google Scholar] [CrossRef]
- Skopenkov, M.; Bo, P.; Bartoň, M.; Pottmann, H. Characterizing envelopes of moving rotational cones and applications in CNC machining. arXiv 2020, arXiv:2001.01444. [Google Scholar] [CrossRef]
- Pottmann, H.; Grohs, P.; Mitra, N.J. Laguerre minimal surfaces, isotropic geometry and linear elasticity. Adv. Comput. Math. 2009, 31, 391. [Google Scholar] [CrossRef] [Green Version]
- Li, C.Y.; Wang, R.H.; Zhu, C.G. An approach for designing a developable surface through a given line of curvature. Comput. Aided Des. 2013, 45, 621–627. [Google Scholar] [CrossRef]
- Farin, G. Rational curves and surfaces. In Mathematical Methods in Computer Aided Geometric Design; Elsevier: Amsterdam, The Netherlands, 1989; pp. 215–238. [Google Scholar]
- Piegl, L. On NURBS: A survey. IEEE Comput. Graph. Appl. 1991, 11, 55–71. [Google Scholar] [CrossRef]
- Farin, G. From conics to NURBS: A tutorial and survey. IEEE Comput. Graph. Appl. 1992, 12, 78–86. [Google Scholar] [CrossRef]
- Han, X. Quadratic trigonometric polynomial curves with a shape parameter. Comput. Aided Geom. Des. 2002, 19, 503–512. [Google Scholar] [CrossRef]
- Wu, B.; Yin, J.; Li, C. A New Rational Cubic Trigonometric Bézier Curve with Four Shape Parameters. J. Inf. Comput. Sci. 2015, 12, 7023–7029. [Google Scholar] [CrossRef]
- Majeed, A.; Qayyum, F. New rational cubic trigonometric B-spline curves with two shape parameters. Comput. Appl. Math. 2020, 39, 1–24. [Google Scholar] [CrossRef]
- Majeed, A.; Abbas, M.; Qayyum, F.; Miura, K.T.; Misro, M.Y.; Nazir, T. Geometric Modeling Using New Cubic Trigonometric B-spline Functions with Shape Parameter. Mathematics 2020, 8, 2102. [Google Scholar] [CrossRef]
- Bashir, U.; Abbas, M.; Ali, J.M. The quartic trigonometric Bézier curve with two shape parameters. In Proceedings of the 2012 Ninth International Conference on Computer Graphics, Imaging and Visualization, Hsinchu, Taiwan, 25–27 July 2012; pp. 70–75. [Google Scholar]
- Yang, L.; Li, J.; Chen, Z. Trigonometric extension of quartic Bézier curves. In Proceedings of the 2011 International Conference on Multimedia Technology, Hangzhou, China, 26–28 July 2011; pp. 926–929. [Google Scholar]
- Misro, M.Y.; Ramli, A.; Ali, J.M. Quintic trigonometric Bézier curve with two shape parameters. Sains Malays. 2017, 46, 825–831. [Google Scholar]
- Misro, M.Y.; Ramli, A.; Ali, J.M.; Hamid, N.N.A. Pythagorean hodograph quintic trigonometric Bézier transtion curve. In Proceedings of the 2017 14th International Conference on Computer Graphics, Imaging and Visualization, Marrakesh, Morocco, 23–25 May 2017; pp. 1–7. [Google Scholar]
- Misro, M.Y.; Ramli, A.; Ali, J.M. Quintic trigonometric Bézier curve and its maximum speed estimation on highway designs. AIP Conf. Proc. 2018, 1974, 020089. [Google Scholar]
- Ammad, M.; Misro, M.Y. Construction of Local Shape Adjustable Surfaces Using Quintic Trigonometric Bézier Curve. Symmetry 2020, 12, 1205. [Google Scholar] [CrossRef]
- Hu, G.; Cao, H.; Qin, X. Construction of generalized developable Bézier surfaces with shape parameters. Math. Methods Appl. Sci. 2018, 41, 7804–7829. [Google Scholar] [CrossRef]
- Hu, G.; Wu, J.; Qin, X. A new approach in designing of local controlled developable H-Bézier surfaces. Adv. Eng. Softw. 2018, 121, 26–38. [Google Scholar] [CrossRef]
- BiBi, S.; Abbas, M.; Misro, M.Y.; Hu, G. A Novel Approach of Hybrid Trigonometric Bézier Curve to the Modeling of Symmetric Revolutionary Curves and Symmetric Rotation Surfaces. IEEE Access 2019, 7, 165779–165792. [Google Scholar] [CrossRef]
- BiBi, S.; Abbas, M.; Miura, K.T.; Misro, M.Y. Geometric Modeling of Novel Generalized Hybrid Trigonometric Bézier-Like Curve with Shape Parameters and Its Applications. Mathematics 2020, 8, 967. [Google Scholar] [CrossRef]
- Han, X.A.; Ma, Y.; Huang, X. The cubic trigonometric Bézier curve with two shape parameters. Appl. Math. Lett. 2009, 22, 226–231. [Google Scholar] [CrossRef] [Green Version]
- Do Carmo, M.P. Differential Geometry of Curves and Surfaces; Prentice-Hall: Upper Saddle River, NJ, USA, 1976; pp. 5–7. [Google Scholar]
- Li, C.Y.; Zhu, C.G. G1 continuity of four pieces of developable surfaces with Bézier boundaries. J. Comput. Appl. Math. 2018, 329, 164–172. [Google Scholar] [CrossRef]
- Farin, G.E.; Farin, G. Curves and Surfaces for CAGD: A Practical Guide; Morgan Kaufmann: Burlington, MA, USA, 2002. [Google Scholar]
- Zhou, M.; Yang, J.; Zheng, H.; Song, W. Design and shape adjustment of developable surfaces. Appl. Math. Model. 2013, 37, 3789–3801. [Google Scholar] [CrossRef]
- Hwang, H.D.; Yoon, S.H. Constructing developable surfaces by wrapping cones and cylinders. Comput. Aided Des. 2015, 58, 230–235. [Google Scholar] [CrossRef]
- Liu, Y.J.; Lai, Y.K.; Hu, S. Stripification of free-form surfaces with global error bounds for developable approximation. IEEE Trans. Autom. Sci. Eng. 2009, 6, 700–709. [Google Scholar]
- Liu, Y.J.; Tang, K.; Joneja, A. Modeling dynamic developable meshes by the Hamilton principle. Comput. Aided Des. 2007, 39, 719–731. [Google Scholar] [CrossRef]
- Liu, Y.J.; Tang, K.; Gong, W.Y.; Wu, T.R. Industrial design using interpolatory discrete developable surfaces. Comput. Aided Des. 2011, 43, 1089–1098. [Google Scholar] [CrossRef]
- Jüttler, B.; Sampoli, M.L. Hermite interpolation by piecewise polynomial surfaces with rational offsets. Comput. Aided Geom. Des. 2000, 17, 361–385. [Google Scholar] [CrossRef]
- Han, X.A.; Ma, Y.; Huang, X. A novel generalization of Bézier curve and surface. J. Comput. Appl. Math. 2008, 217, 180–193. [Google Scholar] [CrossRef] [Green Version]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ammad, M.; Misro, M.Y.; Abbas, M.; Majeed, A. Generalized Developable Cubic Trigonometric Bézier Surfaces. Mathematics 2021, 9, 283. https://doi.org/10.3390/math9030283
Ammad M, Misro MY, Abbas M, Majeed A. Generalized Developable Cubic Trigonometric Bézier Surfaces. Mathematics. 2021; 9(3):283. https://doi.org/10.3390/math9030283
Chicago/Turabian StyleAmmad, Muhammad, Md Yushalify Misro, Muhammad Abbas, and Abdul Majeed. 2021. "Generalized Developable Cubic Trigonometric Bézier Surfaces" Mathematics 9, no. 3: 283. https://doi.org/10.3390/math9030283
APA StyleAmmad, M., Misro, M. Y., Abbas, M., & Majeed, A. (2021). Generalized Developable Cubic Trigonometric Bézier Surfaces. Mathematics, 9(3), 283. https://doi.org/10.3390/math9030283