
An Intuitionistic Fuzzy Set Driven Stochastic Active Contour Model with Uncertainty Analysis



Abstract
:1. Introduction
2. The Previous Works
3. The Proposed Stochastic ACM
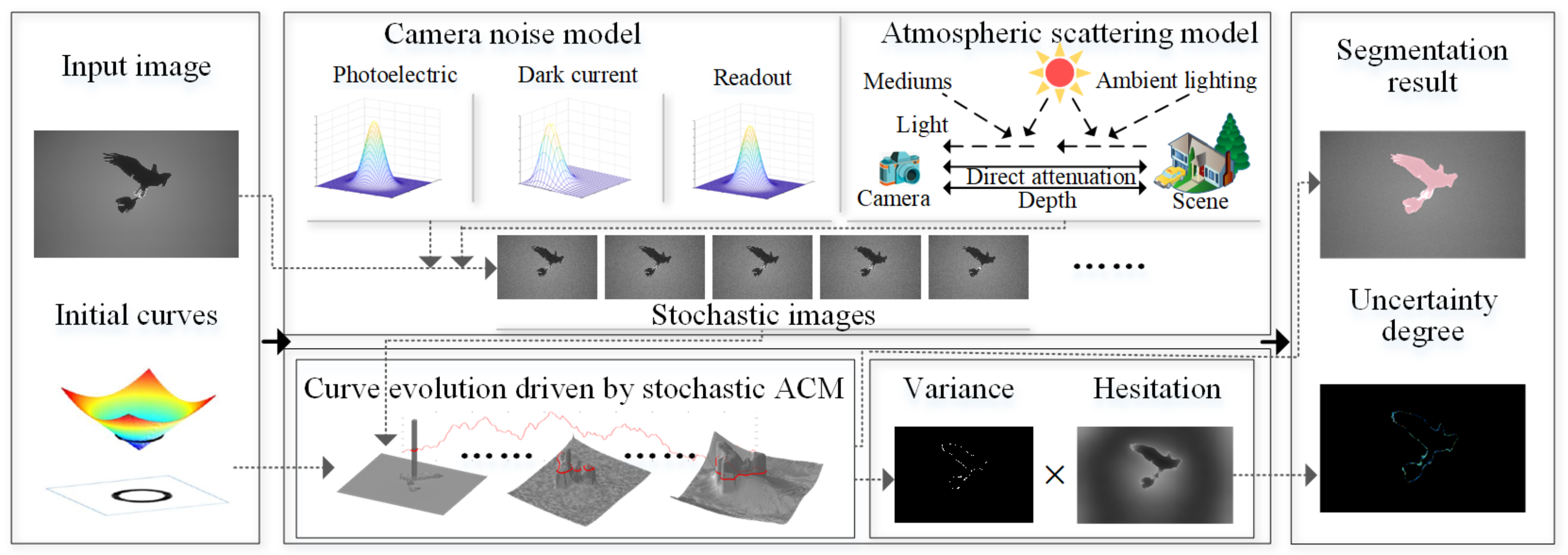
3.1. The Generation of Stochastic Images
3.2. The ACM Driven by IFS
3.3. The Stochastic ACM Driven by IFS
3.4. The Uncertainty Degree
4. Results
4.1. The Qualitative Experiments
4.2. The Quantitative Experiments
4.3. The Miscellaneous Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ACM | Active Contour Model |
| LSM | Level Set Method |
| LBF | Local Fitting Model |
| RSF | Region-Scalable Fitting |
| LIF | Local Image Fitting |
| FEBAC | Fuzzy Energy-Based Active Contour |
| PDE | Partial Differential Equation |
| SPDE | Stochastic Partial Differential Equation |
| SDE | Stochastic Differential Equation |
| IFS | Intuitionistic Fuzzy Set |
References
- Liu, C.; Ng, M.K.P.; Zeng, T. Weighted Variational Model for Elective Image Segmentation with Application to Medical Images. Pattern Recognit. 2018, 76, 367–379. [Google Scholar] [CrossRef]
- Zhang, Y.; Su, Y.; Yang, J.; Ponce, J.; Kong, H. When Dijkstra Meets Vanishing Point: A Stereo Vision Approach for Road Detection. IEEE Trans. Image Process. 2018, 27, 2176–2188. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Xiao, Y.; Yang, J. A Coastline Detection Method in Polarimetric SAR Images Mixing the Region-Based and Edge-Based Active Contour Models. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3735–3747. [Google Scholar] [CrossRef]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active Contour Models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Osher, S.; Sethian, J.A. Fronts Propagating with Curvature-Dependent Speed: Algorithms Based on Hamilton-Jacobi Formulation. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef] [Green Version]
- Caselles, V.; Kimmel, R.; Sapiro, G. Geodesic Active Contours. Int. J. Comput. Vis. 1997, 22, 61–79. [Google Scholar] [CrossRef]
- Mumford, D.; Shah, J. Optimal Approximations by Piecewise Smooth Functions and Associated Variational Problems. Commun. Pure Appl. Math. 1989, 42, 577–685. [Google Scholar] [CrossRef] [Green Version]
- Chan, T.F.; Vese, L.A. Active Contours without Edges. IEEE Trans. Image Process. 2001, 10, 266–277. [Google Scholar] [CrossRef] [Green Version]
- Tsai, A.; Yezzi, A.; Willsky, A.S. Curve Evolution Implementation of the Mumford-Shah Functional for Image Segmentation, Denoising, Interpolation, and Magnification. IEEE Trans. Image Process. 2001, 10, 1169–1186. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Kao, C.Y.; Gore, J.C.; Ding, Z. Implicit Active Contours Driven by Local Binary Fitting Energy. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007. [Google Scholar]
- Li, C.; Kao, C.Y.; Gore, J.C.; Ding, Z. Minimization of Region-Scalable Fitting Energy for Image Segmentation. IEEE Trans. Image Process. 2008, 17, 1940–1949. [Google Scholar]
- Zhang, K.; Song, H.; Zhang, L. Active Contours Driven by Local Image Fitting Energy. Pattern Recognit. 2010, 43, 1199–1206. [Google Scholar] [CrossRef]
- Gibou, F.; Fedkiw, R. A Fast Hybrid K-Means Level Set Algorithm for Segmentation. In Proceedings of the 2002 4th Annual Hawaii International Conference on Statistics and Mathematics, Hawaii, HI, USA, 28 October–1 November 2002. [Google Scholar]
- Chen, Z.; Qiu, T.; Ruan, S. Fuzzy Adaptive Level Set Algorithm for Brain Tissue Segmentation. In Proceedings of the 2008 9th International Conference on Signal Processing, Beijing, China, 26–29 October 2008. [Google Scholar]
- Krinidis, S.; Chatzis, V. Fuzzy Energy-Based Active Contour. IEEE Trans. Image Process. 2009, 18, 2747–2755. [Google Scholar] [CrossRef] [PubMed]
- Tran, T.T.; Pham, V.T.; Shyu, K.K. Image Segmentation Using Fuzzy Energy-Based Active Contour with Shape Prior. J. Vis. Commun. Image Represent. 2014, 25, 1732–1745. [Google Scholar] [CrossRef]
- Juan, O.; Keriven, R.; Postelnicu, G. Stochastic Motion and the Level Set Method in Computer Vision: Stochastic Active Contours. Int. J. Comput. Vis. 2006, 69, 7–25. [Google Scholar] [CrossRef]
- Mao, W.J.; Chu, J. Stochastic Differential Equations—An Introduction with Applications. IEEE Trans. Autom. Control. 2006, 15, 1731–1732. [Google Scholar]
- Law, Y.N.; Lee, H.K.; Yip, A.M. A Multiresolution Stochastic Level Set Method for Mumford-Shah Image Segmentation. IEEE Trans. Image Process. 2008, 17, 2289–2300. [Google Scholar]
- Dariusz, B.; Katarzyna, J.B. Image Denoising Using Backward Stochastic Differential Equations (Colour Version). Adv. Intell. Syst. Comput. 2017, 659, 185–194. [Google Scholar]
- Hedges, L.O.; Kim, H.A.; Jack, R.L. Stochastic Level-Set Method for Shape Optimisation. J. Comput. Phys. 2017, 348, 82–107. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, L.A. The Concept of a Linguistic Variable and Its Application to Approximate Reasoning—III. Inf. Sci. 1975, 9, 43–80. [Google Scholar] [CrossRef]
- Atanassov, K.T. Intuitionistic Fuzzy Set. Fuzzy Sets Syst. 1986, 20, 87–96. [Google Scholar] [CrossRef]
- Nguyen, X.T. Support-intuitionistic fuzzy set: A new concept for soft computing. Int. J. Intell. Syst. Appl. 2015, 7, 11–16. [Google Scholar] [CrossRef] [Green Version]
- Song, Y.; Wang, X.; Quan, W.; Huang, W. A new approach to construct similarity measure for intuitionistic fuzzy sets. Soft Comput. 2019, 23, 1985–1998. [Google Scholar] [CrossRef]
- Riaz, M.; Çagman, N.; Wali, N.; Mushtaq, A. Certain properties of soft multi-set topology with applications in multi-criteria decision making. Decis. Mak. Appl. Manag. Eng. 2020, 3, 70–96. [Google Scholar] [CrossRef]
- Sahoo, P.K.; Satpathy, P.K.; Patnaik, S. Application of soft computing neural network tools to line congestion study of electrical power systems. Int. J. Inf. Commun. Technol. 2018, 13, 219–226. [Google Scholar] [CrossRef]
- Das, S.; Saha, S. Data mining and soft computing using support vector machine: A survey. Int. J. Comput. Appl. 2013, 77, 40–47. [Google Scholar] [CrossRef]
- Rzheutskaya, S.; Rzheutskiy, A.; Salikhova, R. Applying a genetic algorithm to build a classification tree. In Proceedings of the III International Scientific and Practical Conference, St. Petersburg, Russia, 14–15 March 2020; pp. 1–4. [Google Scholar]
- Zhang, Y.W.; Zhang, W.M.; Peng, K.; Yan, D.C.; Wu, Q.L. A novel edge server selection method based on combined genetic algorithm and simulated annealing algorithm. Automatika 2021, 62, 32–43. [Google Scholar] [CrossRef]
- Niu, S.; Chen, Q.; Sisternes, L.D.; Ji, Z.; Zhou, Z.; Rubin, D.L. Robust Noise Region-Based Active Contour Model Via Local Similarity Factor for Image Segmentation. Pattern Recognit. 2017, 61, 104–119. [Google Scholar] [CrossRef] [Green Version]
- Boncelet, C. Image Noise Models. In The Essential Guide to Image Process; Academic Press: Pittsburgh, PA, USA, 2009. [Google Scholar]
- Peirson, D.; Cawse, P.; Salmon, L.; Cambray, R. Trace Elements in the Atmospheric Environment. Nature 1973, 241, 252–256. [Google Scholar] [CrossRef]
- Tsin, Y.; Ramesh, V.; Kanade, T. Statistical Calibration of CCD Imaging Process. In Proceedings of the 2001 IEEE International Conference on Computer Vision, Vancouver, BC, Canada, 7–14 July 2001. [Google Scholar]
- McCartney, E.J. Optics of the Atmosphere: Scattering by Molecules and Particles. Phys. Today 1977, 30, 76–77. [Google Scholar] [CrossRef]
- Szmidt, E.; Kacprzyk, J. Entropy for Intuitionistic Fuzzy Set. Fuzzy Sets Syst. 2001, 118, 467–477. [Google Scholar] [CrossRef]
- Sugeno, M. Fuzzy Measures and Fuzzy Integral: A Survey. Fuzzy Autom. Decis. Process. 1977, 78, 89–102. [Google Scholar]
- Mao, X. The Truncated Euler–Maruyama Method for Stochastic Differential Equations. J. Comput. Appl. Math. 2015, 290, 370–384. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Zhang, L.; Lam, K.M.; Zhang, D. A Level Set Approach to Image Segmentation with Intensity Inhomogeneity. IEEE Trans. Cybern. 2016, 46, 546–557. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Zhao, Y.; Zhang, L.; Wang, X.; Zhang, Y.; Guo, F. Entropy-Based Global and Local Weight Adaptive Image Segmentation Models. Tsinghua Sci. Technol. 2019, 25, 149–160. [Google Scholar] [CrossRef]
- Martin, D.; Fowlkes, C.; Tal, D.; Malik, J. A Database of Human Segmented Natural Images and its Application to Evaluating Segmentation Algorithms and Measuring Ecological Statistics. In Proceedings of the 8th International Conference on Computer Vision, Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 416–423. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | CV | RSF | FEBAC | RLSF | Ours | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| DSC ↑ | JSC ↑ | DSC ↑ | JSC ↑ | DSC ↑ | JSC ↑ | DSC ↑ | JSC ↑ | DSC ↑ | JSC ↑ | |
1.  | 0.634 | 0.618 | 0.989 | 0.961 | 0.637 | 0.611 | 0.991 | 0.973 | 0.993 | 0.972 |
2.  | 0.852 | 0.837 | 0.982 | 0.952 | 0.856 | 0.847 | 0.984 | 0.965 | 0.987 | 0.967 |
3.  | 0.681 | 0.665 | 0.978 | 0.951 | 0.702 | 0.674 | 0.981 | 0.962 | 0.984 | 0.963 |
4.  | 0.783 | 0.766 | 0.974 | 0.944 | 0.825 | 0.798 | 0.976 | 0.958 | 0.978 | 0.956 |
5.  | 0.812 | 0.796 | 0.862 | 0.833 | 0.853 | 0.826 | 0.915 | 0.895 | 0.975 | 0.954 |
6.  | 0.637 | 0.620 | 0.815 | 0.787 | 0.681 | 0.654 | 0.893 | 0.874 | 0.972 | 0.952 |
7.  | 0.785 | 0.768 | 0.542 | 0.512 | 0.802 | 0.774 | 0.887 | 0.866 | 0.965 | 0.943 |
8.  | 0.773 | 0.757 | 0.706 | 0.677 | 0.826 | 0.798 | 0.872 | 0.853 | 0.981 | 0.961 |
9.  | 0.671 | 0.654 | 0.623 | 0.593 | 0.898 | 0.871 | 0.885 | 0.865 | 0.973 | 0.951 |
10.  | 0.814 | 0.798 | 0.587 | 0.560 | 0.925 | 0.897 | 0.902 | 0.884 | 0.987 | 0.967 |
11.  | 0.796 | 0.779 | 0.715 | 0.687 | 0.839 | 0.813 | 0.846 | 0.828 | 0.962 | 0.939 |
| Ave.(1–11) | 0.749 | 0.733 | 0.798 | 0.769 | 0.804 | 0.778 | 0.921 | 0.902 | 0.978 | 0.957 |
| STDEV(1–11) | 0.077 | 0.097 | 0.172 | 0.172 | 0.092 | 0.093 | 0.052 | 0.052 | 0.010 | 0.010 |
| Ave.(BSD-500) | 0.852 | 0.837 | 0.785 | 0.754 | 0.893 | 0.865 | 0.904 | 0.885 | 0.936 | 0.913 |
| STDEV(BSD-500) | 0.071 | 0.075 | 0.079 | 0.081 | 0.064 | 0.061 | 0.062 | 0.065 | 0.057 | 0.059 |
| Image | CV | RSF | FEBAC | RLSF | Ours |
|---|---|---|---|---|---|
1.  | 3.98 | 4.96 | 3.21 | 15.83 | 5.86 |
2.  | 4.12 | 4.82 | 2.98 | 15.14 | 6.13 |
3.  | 1.85 | 2.71 | 1.59 | 8.78 | 3.31 |
4.  | 1.94 | 2.84 | 1.63 | 8.94 | 3.45 |
5.  | 13.75 | 15.33 | 8.96 | 48.25 | 18.64 |
6.  | 1.83 | 2.57 | 1.52 | 8.37 | 3.26 |
7.  | 16.82 | 18.92 | 11.49 | 53.16 | 22.39 |
8.  | 19.53 | 20.43 | 12.72 | 66.75 | 25.32 |
9.  | 19.45 | 21.38 | 13.02 | 67.19 | 25.58 |
10.  | 18.69 | 21.56 | 12.63 | 66.82 | 25.87 |
11.  | 19.37 | 20.72 | 12.84 | 67.34 | 26.14 |
| Ave.(1–11) | 11.03 | 12.39 | 7.51 | 38.78 | 15.09 |
| STDEV(1–11) | 8.14 | 8.63 | 5.24 | 25.74 | 9.99 |
| Ave.(BSD-500) | 19.37 | 21.25 | 12.86 | 67.24 | 26.13 |
| STDEV(BSD-500) | 0.32 | 0.35 | 0.21 | 0.39 | 0.27 |
| Image | Baseline | Baseline + Uncertainty Reg. | ||||
|---|---|---|---|---|---|---|
| DSC↑ | JSC↑ | HD↓ | DSC↑ | JSC↑ | HD↓ | |
1.  | 0.636 | 0.613 | 0.0048 | 0.993 | 0.972 | 0.0043 |
2.  | 0.859 | 0.848 | 0.0027 | 0.987 | 0.967 | 0.0024 |
3.  | 0.721 | 0.691 | 0.0147 | 0.984 | 0.963 | 0.0124 |
4.  | 0.834 | 0.809 | 0.0128 | 0.978 | 0.956 | 0.0112 |
5.  | 0.875 | 0.846 | 0.0039 | 0.975 | 0.954 | 0.0037 |
6.  | 0.712 | 0.683 | 0.0264 | 0.972 | 0.952 | 0.0244 |
7.  | 0.816 | 0.789 | 0.0038 | 0.965 | 0.943 | 0.0036 |
8.  | 0.845 | 0.819 | 0.0077 | 0.981 | 0.961 | 0.0069 |
9.  | 0.912 | 0.882 | 0.0090 | 0.973 | 0.951 | 0.0083 |
10.  | 0.935 | 0.906 | 0.0108 | 0.987 | 0.967 | 0.0101 |
11.  | 0.852 | 0.825 | 0.0102 | 0.962 | 0.939 | 0.0095 |
| Ave.(1–11) | 0.818 | 0.792 | 0.0097 | 0.978 | 0.957 | 0.0088 |
| STDEV(1–11) | 0.019 | 0.091 | 0.0068 | 0.010 | 0.010 | 0.0062 |
| Ave.(BSD-500) | 0.899 | 0.874 | 0.0094 | 0.936 | 0.913 | 0.0087 |
| STDEV(BSD-500) | 0.062 | 0.063 | 0.0016 | 0.057 | 0.059 | 0.0014 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Li, Y.; Zhang, J. An Intuitionistic Fuzzy Set Driven Stochastic Active Contour Model with Uncertainty Analysis. Mathematics 2021, 9, 301. https://doi.org/10.3390/math9040301
Wang B, Li Y, Zhang J. An Intuitionistic Fuzzy Set Driven Stochastic Active Contour Model with Uncertainty Analysis. Mathematics. 2021; 9(4):301. https://doi.org/10.3390/math9040301
Chicago/Turabian StyleWang, Bin, Yaoqing Li, and Jianlong Zhang. 2021. "An Intuitionistic Fuzzy Set Driven Stochastic Active Contour Model with Uncertainty Analysis" Mathematics 9, no. 4: 301. https://doi.org/10.3390/math9040301
APA StyleWang, B., Li, Y., & Zhang, J. (2021). An Intuitionistic Fuzzy Set Driven Stochastic Active Contour Model with Uncertainty Analysis. Mathematics, 9(4), 301. https://doi.org/10.3390/math9040301