
BUSIS: A Benchmark for Breast Ultrasound Image Segmentation

 , ,
, ,
Abstract
:1. Introduction
2. Related Works
3. Benchmark Setup
3.1. BUS Segmentation Approaches and Setup
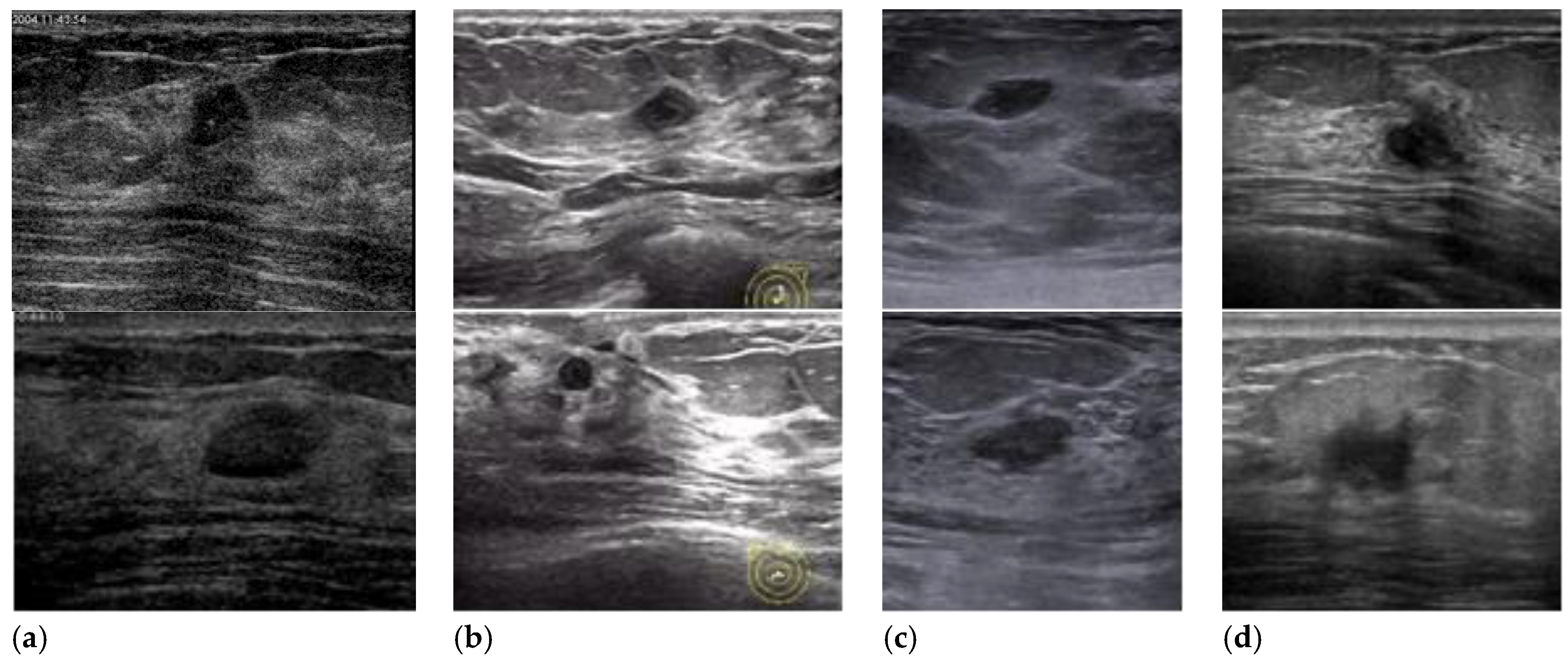
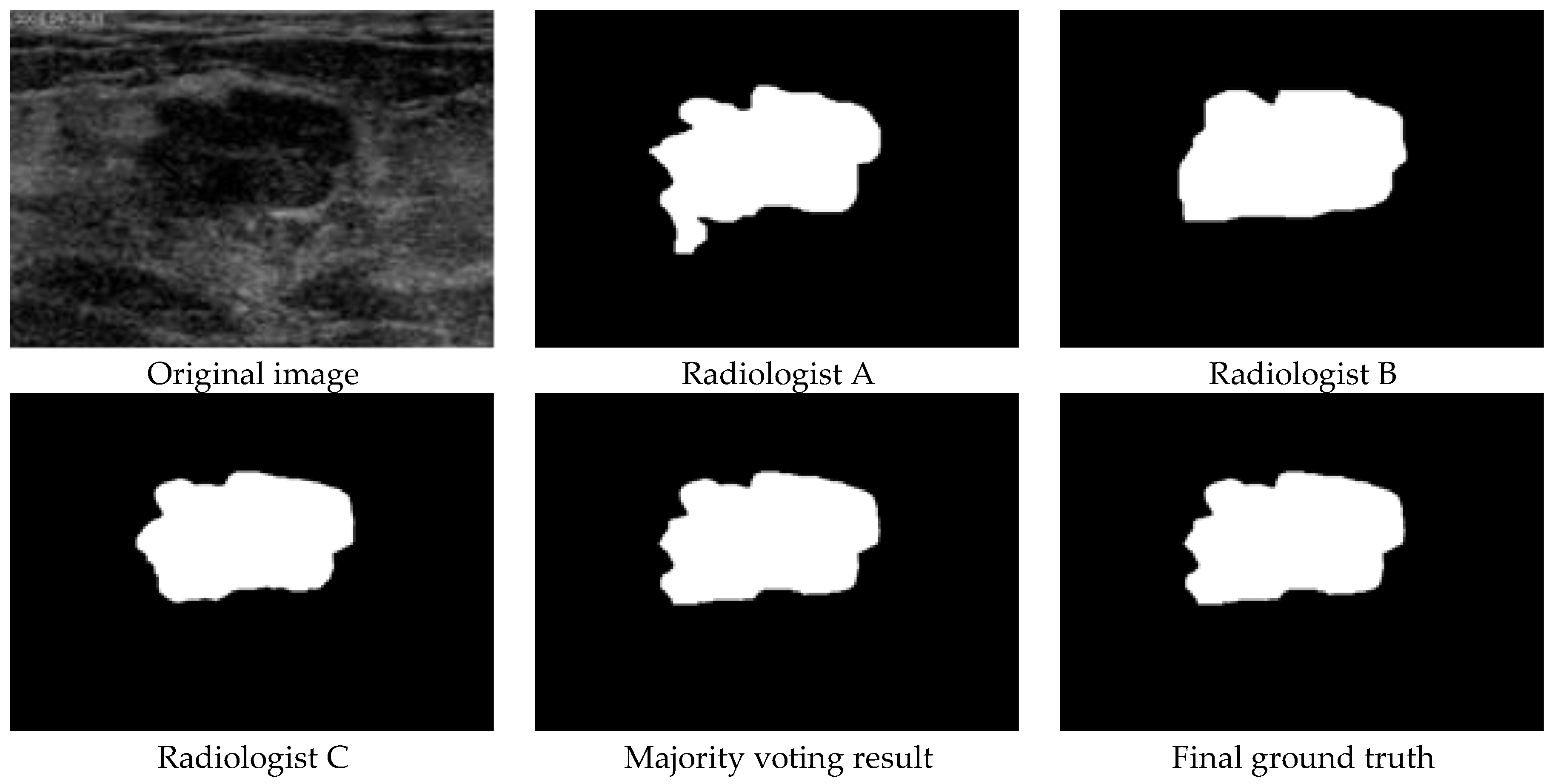
3.2. Dataset and Ground Truth Generation
3.3. Quantitative Metrics
4. Approach Comparison
4.1. Semi-Automatic Segmentation Approaches
4.2. Fully Automatic Segmentation Approaches
5. Discussions
6. Conclusions
- As shown in Table 3, by using the benchmark, no approaches in this study can achieve the same performances reported in their original papers, which demonstrates the models’ poor capability/robustness to adapt to BUS images from different sources.
- Deep learning approaches outperform all conventional approaches using our benchmark dataset; but the explainability and robustness of existing approaches still need to be improved.
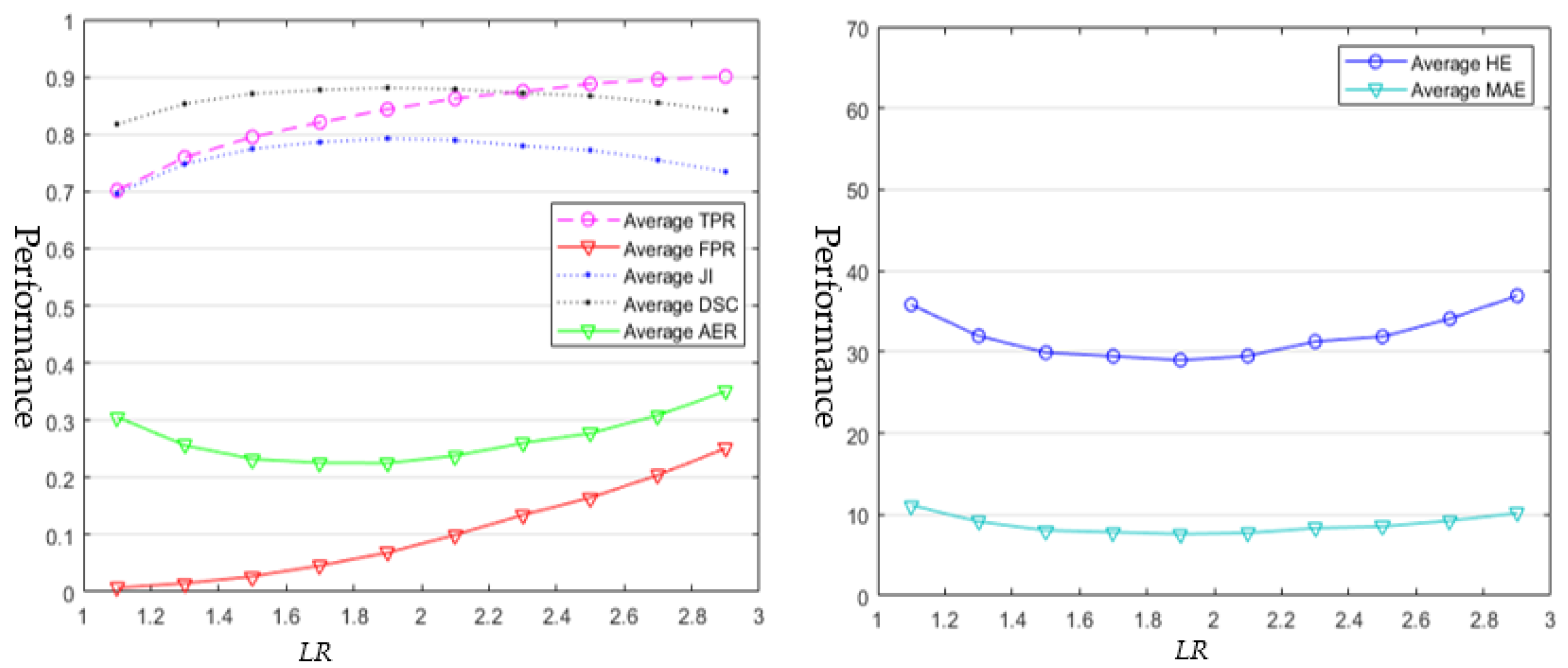
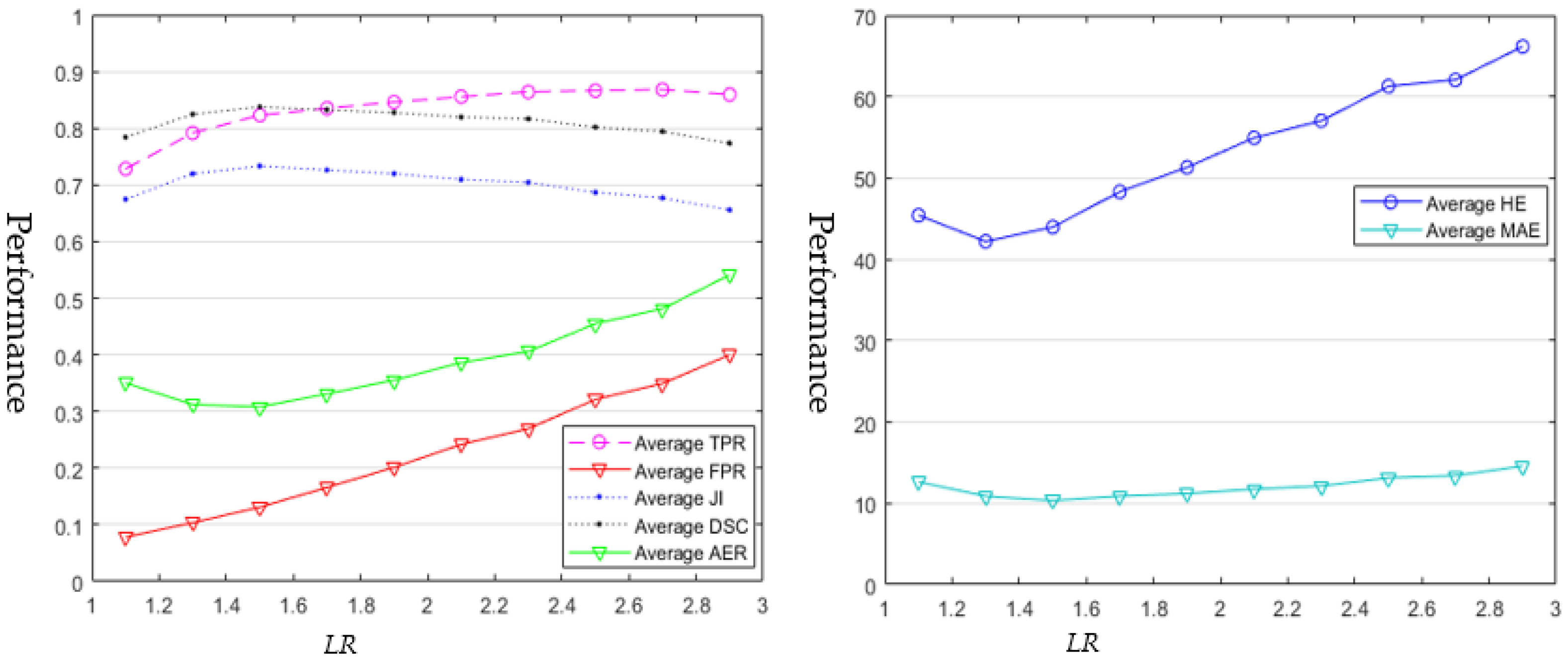
- The quantitative metrics such as JI, DSC, AER, HE, and MAE are more comprehensive and effective to measure the overall segmentation performance than TPR and FPR; however, TPR and FPR are also useful for developing and improving algorithms.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Siegel, R.L.; Miller, K.D.; Jemal, A. Cancer statistics, 2015. CA-Cancer J. Clin. 2015, 65, 5–29. [Google Scholar] [CrossRef] [PubMed]
- Cheng, H.D.; Shan, J.; Ju, W.; Guo, Y.H.; Zhang, L. Automated breast cancer detection and classification using ultrasound images: A survey. Pattern Recognit. 2010, 43, 299–317. [Google Scholar] [CrossRef] [Green Version]
- Kuo, H.-C.; Giger, M.L.; Reiser, I.; Drukker, K.; Boone, J.M.; Lindfors, K.K.; Yang, K.; Edwards, A.V.; Sennett, C.A. Segmentation of breast masses on dedicated breast computed tomography and three-dimensional breast ultrasound images. J. Med. Imaging 2014, 1, 014501. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Cheng, H.; Huang, J.; Tian, J.; Tang, X.; Liu, J. Probability density difference-based active contour for ultrasound image segmentation. Pattern Recognit. 2010, 43, 2028–2042. [Google Scholar] [CrossRef]
- Xian, M.; Zhang, Y.; Cheng, H. Fully automatic segmentation of breast ultrasound images based on breast characteristics in space and frequency domains. Pattern Recognit. 2015, 48, 485–497. [Google Scholar] [CrossRef]
- Shao, H.; Zhang, Y.; Xian, M.; Cheng, H.D.; Xu, F.; Ding, J. A saliency model for automated tumor detection in breast ultrasound images. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 1424–1428. [Google Scholar]
- Huang, Q.; Bai, X.; Li, Y.; Jin, L.; Li, X. Optimized graph-based segmentation for ultrasound images. Neurocomputing 2014, 129, 216–224. [Google Scholar] [CrossRef]
- Xian, M. A Fully Automatic Breast Ultrasound Image Segmentation Approach Based On Neutro-Connectedness. In Proceedings of the ICPR, Stockholm, Sweden, 24–28 August 2014; pp. 2495–2500. [Google Scholar]
- Gao, L.; Yang, W.; Liao, Z.; Liu, X.; Feng, Q.; Chen, W. Segmentation of ultrasonic breast tumors based on homogeneous patch. Med. Phys. 2012, 39, 3299–3318. [Google Scholar] [CrossRef] [Green Version]
- Hao, Z.; Wang, Q.; Seong, Y.K.; Lee, J.-H.; Ren, H.; Kim, J.-y. Combining CRF and multi-hypothesis detection for accurate lesion segmentation in breast sonograms. Med. Image Comput. Comput. Assist. Interv. 2012, 15, 504–511. [Google Scholar] [CrossRef] [Green Version]
- Moon, W.K.; Lo, C.-M.; Chen, R.-T.; Shen, Y.-W.; Chang, J.M.; Huang, C.-S.; Chen, J.-H.; Hsu, W.-W.; Chang, R.-F. Tumor detection in automated breast ultrasound images using quantitative tissue clustering. Med. Phys. 2014, 41, 042901. [Google Scholar] [CrossRef] [Green Version]
- Shan, J.; Cheng, H.D.; Wang, Y. A novel segmentation method for breast ultrasound images based on neutrosophic l-means clustering. Med. Phys. 2012, 39, 5669–5682. [Google Scholar] [CrossRef]
- Hao, Z.; Wang, Q.; Ren, H.; Xu, K.; Seong, Y.K.; Kim, J. Multi-scale superpixel classification for tumor segmentation in breast ultrasound images. In Proceedings of the IEEE ICIP, Orlando, FL, USA, 30 September–3 October 2012; pp. 2817–2820. [Google Scholar]
- Jiang, P.; Peng, J.; Zhang, G.; Cheng, E.; Megalooikonomou, V.; Ling, H. Learning-based automatic breast tumor detection and segmentation in ultrasound images. In Proceedings of the 2012 9th IEEE International Symposium on Biomedical Imaging (ISBI), Barcelona, Spain, 2–5 May 2012; pp. 1587–1590. [Google Scholar]
- Shan, J.; Cheng, H.D.; Wang, Y.X. Completely Automated Segmentation Approach for Breast Ultrasound Images Using Multiple-Domain Features. Ultrasound Med. Biol. 2012, 38, 262–275. [Google Scholar] [CrossRef]
- Pons, G.; Martí, R.; Ganau, S.; Sentís, M.; Martí, J. Computerized Detection of Breast Lesions Using Deformable Part Models in Ultrasound Images. Ultrasound Med. Biol. 2014, 40, 2252–2264. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.-C.; Huang, C.-S.; Chen, J.-H.; Chang, R.-F. Whole Breast Lesion Detection Using Naive Bayes Classifier for Portable Ultrasound. Ultrasound Med. Biol. 2012, 38, 1870–1880. [Google Scholar] [CrossRef] [PubMed]
- Torbati, N.; Ayatollahi, A.; Kermani, A. An efficient neural network based method for medical image segmentation. Comput. Biol. Med. 2014, 44, 76–87. [Google Scholar] [CrossRef] [PubMed]
- Huang, K.; Zhang, Y.; Cheng, H.; Xing, P.; Zhang, B. Semantic Segmentation of Breast Ultrasound Image with Pyramid Fuzzy Uncertainty Reduction and Direction Connectedness Feature. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 3357–3364. [Google Scholar]
- Huang, K.; Cheng, H.; Zhang, Y.; Zhang, B.; Xing, P.; Ning, C. Medical Knowledge Constrained Semantic Breast Ultrasound Image Segmentation. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 1193–1198. [Google Scholar]
- Shareef, B.; Xian, M.; Vakanski, A. STAN: Small tumor-aware network for breast ultrasound image segmentation. In Proceedings of the IEEE International Symposium on Biomedical Imaging, Iowa City, IA, USA, 3–7 April 2020; pp. 1–5. [Google Scholar]
- Liu, Y.; Cheng, H.D.; Huang, J.; Zhang, Y.; Tang, X. An Effective Approach of Lesion Segmentation Within the Breast Ultrasound Image Based on the Cellular Automata Principle. J. Digit. Imaging 2012, 25, 580–590. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gómez, W.; Leija, L.; Alvarenga, A.V.; Infantosi, A.F.C.; Pereira, W.C.A. Computerized lesion segmentation of breast ultrasound based on marker-controlled watershed transformation. Med. Phys. 2009, 37, 82–95. [Google Scholar] [CrossRef]
- Yap, M.H.; Pons, G.; Martí, J.; Ganau, S.; Sentís, M.; Zwiggelaar, R.; Davison, A.K.; Marti, R. Automated breast ultrasound lesions detection using convolutional neural networks. IEEE J. Biomed. Health Inform. 2017, 22, 1218–1226. [Google Scholar] [CrossRef] [Green Version]
- Karunanayake, N.; Aimmanee, P.; Lohitvisate, W.; Makhanov, S. Particle method for segmentation of breast tumors in ultrasound images. Math. Comput. Simul. 2020, 170, 257–284. [Google Scholar] [CrossRef]
- Al-Dhabyani, W.; Gomaa, M.; Khaled, H.; Fahmy, A. Dataset of breast ultrasound images. Data Brief 2020, 28, 104863. [Google Scholar] [CrossRef]
- Xian, M.; Zhang, Y.; Cheng, H.; Xu, F.; Zhang, B.; Ding, J. Automatic breast ultrasound image segmentation: A survey. Pattern Recognit. 2018, 79, 340–355. [Google Scholar] [CrossRef] [Green Version]
- Madabhushi, A.; Metaxas, D. Combining low-, high-level and empirical domain knowledge for automated segmentation of ultrasonic breast lesions. IEEE Trans. Med Imaging 2003, 22, 155–169. [Google Scholar] [CrossRef]
- Chang, R.-F.; Wu, W.-J.; Moon, W.K.; Chen, W.-M.; Lee, W.; Chen, D.-R. Segmentation of breast tumor in three-dimensional ultrasound images using three-dimensional discrete active contour model. Ultrasound Med. Biol. 2003, 29, 1571–1581. [Google Scholar] [CrossRef]
- Czerwinski, R.N.; Jones, D.L.; O’Brien, W.D. Detection of lines and boundaries in speckle images-application to medical ultrasound. IEEE Trans. Med. Imaging 1999, 18, 126–136. [Google Scholar] [CrossRef]
- Huang, Y.-L.; Chen, D.-R. Automatic contouring for breast tumors in 2-D sonography. In Proceedings of the IEEE-EMBS 2005. 27th Annual International Conference of the Engineering in Medicine and Biology Society, Shanghai, China, 17–18 January 2006; pp. 3225–3228. [Google Scholar]
- Xu, C.; Prince, J.L. Generalized gradient vector flow external forces for active contours. Signal Process. 1998, 71, 131–139. [Google Scholar] [CrossRef] [Green Version]
- Gómez, W.; Infantosi, A.; Leija, L.; Pereira, W. Active Contours without Edges Applied to Breast Lesions on Ultrasound. In XII Mediterranean Conference on Medical and Biological Engineering and Computing 2010; Springer: Berlin, Germany, 2010; pp. 292–295. [Google Scholar]
- Chan, T.F.; Vese, L.A. Active contours without edges. IEEE Trans. Image Process. 2001, 10, 266–277. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Daoud, M.I.; Baba, M.M.; Awwad, F.; Al-Najjar, M.; Tarawneh, E.S. Accurate Segmentation of Breast Tumors in Ultrasound Images Using a Custom-Made Active Contour Model and Signal-to-Noise Ratio Variations. In Proceedings of the 2012 Eighth International Conference on Signal Image Technology and Internet Based Systems (SITIS), Sorrento, Italy, 25–29 November 2012; pp. 137–141. [Google Scholar]
- Gao, L.; Liu, X.; Chen, W. Phase- and GVF-Based Level Set Segmentation of Ultrasonic Breast Tumors. J. Appl. Math. 2012, 2012, 1–22. [Google Scholar] [CrossRef]
- Li, C.; Xu, C.; Gui, C.; Fox, M.D. Distance Regularized Level Set Evolution and Its Application to Image Segmentation. IEEE Trans. Image Process. 2010, 19, 3243–3254. [Google Scholar] [CrossRef]
- Kovesi, P. Phase congruency: A low-level image invariant. Psychol. Res. 2000, 64, 136–148. [Google Scholar] [CrossRef]
- Potts, R.B. Some generalized order-disorder transformations. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 1952; pp. 106–109. [Google Scholar]
- Boukerroui, D.; Basset, O.; Guérin, N.; Baskurt, A. Multiresolution texture based adaptive clustering algorithm for breast lesion segmentation. Eur. J. Ultrasound 1998, 8, 135–144. [Google Scholar] [CrossRef]
- Ashton, E.A.; Parker, K.J. Multiple Resolution Bayesian Segmentation of Ultrasound Images. Ultrason. Imaging 1995, 17, 291–304. [Google Scholar] [CrossRef]
- Xiao, G.; Brady, M.; Noble, A.; Zhang, Y. Segmentation of ultrasound B-mode images with intensity inhomogeneity correction. IEEE Trans. Med Imaging 2002, 21, 48–57. [Google Scholar] [CrossRef]
- Pons, G.; Martí, J.; Martí, R.; Noble, J.A. Simultaneous lesion segmentation and bias correction in breast ultrasound images. In Pattern Recognition and Image Analysis; Springer: Berlin, Germany, 2011; pp. 692–699. [Google Scholar]
- Chiang, H.-H.; Cheng, J.-Z.; Hung, P.-K.; Liu, C.-Y.; Chung, C.-H.; Chen, C.-M. Cell-based graph cut for segmentation of 2D/3D sonographic breast images. In Proceedings of the IEEE ISBI: From Nano to Macro, Rotterdam, The Netherlands, 14–17 April 2010; pp. 177–180. [Google Scholar]
- Chen, C.-M.; Chou, Y.-H.; Chen, C.S.; Cheng, J.-Z.; Ou, Y.-F.; Yeh, F.-C.; Chen, K.-W. Cell-competition algorithm: A new segmentation algorithm for multiple objects with irregular boundaries in ultrasound images. Ultrasound Med. Biol. 2005, 31, 1647–1664. [Google Scholar] [CrossRef] [PubMed]
- Tu, Z. Probabilistic boosting-tree: Learning discriminative models for classification, recognition, and clustering. In Proceedings of the IEEE ICCV, Beijing, China, 17–21 October 2005; pp. 1589–1596. [Google Scholar]
- Xu, Y. A modified spatial fuzzy clustering method based on texture analysis for ultrasound image segmentation. In Proceedings of the IEEE ISIE, Seoul, Korea, 5–8 July 2009; pp. 746–751. [Google Scholar]
- Chuang, K.-S.; Tzeng, H.-L.; Chen, S.; Wu, J.; Chen, T.-J. Fuzzy c-means clustering with spatial information for image segmentation. Comput. Med. Imaging Graph. 2006, 30, 9–15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lo, C.; Shen, Y.-W.; Huang, C.-S.; Chang, R.-F. Computer-aided multiview tumor detection for automated whole breast ultrasound. Ultrason. Imaging 2014, 36, 3–17. [Google Scholar] [CrossRef]
- Liu, B.; Cheng, H.; Huang, J.; Tian, J.; Tang, X.; Liu, J. Fully automatic and segmentation-robust classification of breast tumors based on local texture analysis of ultrasound images. Pattern Recognit. 2010, 43, 280–298. [Google Scholar] [CrossRef]
- Viola, P.; Jones, M.J. Robust real-time face detection. Int. J. Comput. Vis. 2004, 57, 137–154. [Google Scholar] [CrossRef]
- Huang, S.-F.; Chen, Y.-C.; Moon, W.K. Neural network analysis applied to tumor segmentation on 3D breast ultrasound images. In Proceedings of the ISBI 2008. 5th IEEE International Symposium on Biomedical Imaging: From Nano to Macro, Paris, France, 14–17 May 2008; pp. 1303–1306. [Google Scholar]
- Othman, A.A.; Tizhoosh, H.R. Segmentation of Breast Ultrasound Images Using Neural Networks. In Engineering Applications of Neural Networks; Springer: Berlin, Germany, 2011; pp. 260–269. [Google Scholar]
- Milletari, F.; Navab, N.; Ahmadi, S.-A. V-net: Fully convolutional neural networks for volumetric medical image segmentation. In Proceedings of the IEEE 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 565–571. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Berlin, Germany, 2015; pp. 234–241. [Google Scholar]
- Xie, Y.; Zhang, Z.; Sapkota, M.; Yang, L. Spatial Clockwork Recurrent Neural Network for Muscle Perimysium Segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Berlin, Germany, 2016; pp. 185–193. [Google Scholar]
- Zhang, W.; Li, R.; Deng, H.; Wang, L.; Lin, W.; Ji, S.; Shen, D. Deep convolutional neural networks for multi-modality isointense infant brain image segmentation. NeuroImage 2015, 108, 214–224. [Google Scholar] [CrossRef] [Green Version]
- Cheng, J.-Z.; Ni, D.; Chou, Y.-H.; Qin, J.; Tiu, C.-M.; Chang, Y.-C.; Huang, C.-S.; Shen, D.; Chen, C.-M. Computer-Aided Diagnosis with Deep Learning Architecture: Applications to Breast Lesions in US Images and Pulmonary Nodules in CT Scans. Sci. Rep. 2016, 6, 24454. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 640–651. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Huang, K.; Zhang, Y.; Cheng, H.; Xing, P.; Zhang, B. Semantic segmentation of breast ultrasound image with fuzzy deep learning network and breast anatomy constraints. Neurocomputing 2021, 450, 319–335. [Google Scholar] [CrossRef]
- Zhuang, Z.; Li, N.; Raj, A.N.J.; Mahesh, V.G.V.; Qiu, S. An RDAU-NET model for lesion segmentation in breast ultrasound images. PLoS ONE 2019, 14, e0221535. [Google Scholar] [CrossRef] [PubMed]
- Guan, L.; Wu, Y.; Zhao, J. Scan: Semantic context aware network for accurate small object detection. Int. J. Comput. Intell. Syst. 2018, 11, 951–961. [Google Scholar] [CrossRef] [Green Version]
- Ibtehaz, N.; Rahman, M.S. MultiResUNet: Rethinking the U-Net architecture for multimodal biomedical image segmentation. Neural Netw. 2020, 121, 74–87. [Google Scholar] [CrossRef] [PubMed]
- Gu, Z.; Cheng, J.; Fu, H.; Zhou, K.; Hao, H.; Zhao, Y.; Zhang, T.; Gao, S.; Liu, J. Ce-net: Context encoder network for 2D medical image segmentation. IEEE Trans. Med. Imaging 2019, 38, 2281–2292. [Google Scholar] [CrossRef] [Green Version]
- Dong, R.; Pan, X.; Li, F. DenseU-net-based semantic segmentation of small objects in urban remote sensing images. IEEE Access 2019, 7, 65347–65356. [Google Scholar] [CrossRef]
- Carmon, Y.; Raghunathan, A.; Schmidt, L.; Duchi, J.C.; Liang, P.S. Unlabeled data improves adversarial robustness. Adv. Neural Inf. Process. Syst. 2019, 32, 11192–11203. [Google Scholar]
- Zhang, H.; Yu, Y.; Jiao, J.; Xing, E.; El Ghaoui, L.; Jordan, M. Theoretically principled trade-off between robustness and accuracy. In Proceedings of the International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; pp. 7472–7482. [Google Scholar]
- Qin, C.; Martens, J.; Gowal, S.; Krishnan, D.; Dvijotham, K.; Fawzi, A.; De, S.; Stanforth, R.; Kohli, P. Adversarial robustness through local linearization. Adv. Neural Inf. Process. Syst. 2019, 32, 13842–13853. [Google Scholar]
- Yap, M.H.; Edirisinghe, E.A.; Bez, H.E. A novel algorithm for initial lesion detection in ultrasound breast images. J. Appl. Clin. Med. Phys. 2008, 9, 181–199. [Google Scholar] [CrossRef]
- Kwak, J.I.; Kim, S.H.; Kim, N.C. RD-based seeded region growing for extraction of breast tumor in an ultrasound volume. In International Conference on Computational and Information Science; Springer: Berlin, Germany, 2005; pp. 799–808. [Google Scholar]
- Huang, Y.-L.; Chen, D.-R. Watershed segmentation for breast tumor in 2-D sonography. Ultrasound Med. Biol. 2004, 30, 625–632. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, L.; Cheng, H.-D. Segmentation of ultrasound breast images based on a neutrosophic method. Opt. Eng. 2010, 49, 117001–117012. [Google Scholar] [CrossRef]
- Lo, C.-M.; Chen, R.-T.; Chang, Y.-C.; Yang, Y.-W.; Hung, M.-J.; Huang, C.-S.; Chang, R.-F. Multi-dimensional tumor detection in automated whole breast ultrasound using topographic watershed. IEEE Trans. Med. Imaging 2014, 33, 1503–1511. [Google Scholar] [CrossRef] [PubMed]
- Xian, M.; Zhang, Y.; Cheng, H.-D.; Xu, F.; Ding, J. Neutro-connectedness cut. IEEE Trans. Image Process. 2016, 25, 4691–4703. [Google Scholar] [CrossRef] [PubMed]
- Safont, G.; Salazar, A.; Vergara, L. Vector score alpha integration for classifier late fusion. Pattern Recogn. Lett. 2020, 136, 48–55. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Article | Type | Year | Category | Dataset Size/Availability | Metrics |
|---|---|---|---|---|---|
| Kuo, et al. [3] | S | 2014 | Deformable models | 98/private | DSC |
| Liu, et al. [4] | S | 2010 | Level set-based | 79/private | TP, FP, SI |
| Xian, et al. [5] | F | 2015 | Graph-based | 184/private | TPR, FPR, SI, HD, MD |
| Shao, et al. [6] | F | 2015 | Graph-based | 450/private | TPR, FPR, SI |
| Huang, et al. [7] | S | 2014 | Graph-based | 20/private | ARE, TPVF, FPVF, FNVF |
| Xian, et al. [8] | F | 2014 | Graph-based | 131/private | SI, FPR, AHE |
| Gao, et al. [9] | S | 2012 | Normalized cut | 100/private | TP, FP, SI, HD, MD |
| Hao, et al. [10] | F | 2012 | CRF + DPM | 480/private | JI |
| Moon, et al. [11] | S | 2014 | Fuzzy C-means | 148/private | Sensitivity and FP |
| Shan, et al. [12] | F | 2012 | Neutrosophic L-mean | 122/private | TPR, FPR, FNR, SI, HD, and MD |
| Hao, et al. [13] | F | 2012 | Hierarchical SVM + CRF | 261/private | JI |
| Jiang, et al. [14] | S | 2012 | Adaboost + SVM | 112/private | Mean overlap ratio |
| Shan, et al. [15] | F | 2012 | Feedforward neural network | 60/private | TPR, FPR, FNR, HD, MD |
| Pons, et al. [16] | S | 2014 | SVM + DPM | 163/private | Sensitivity, ROC area |
| Yang, et al. [17] | S | 2012 | Naive Bayes classifier | 33/private | FP |
| Torbati, et al. [18] | S | 2014 | Feedforward Neural network | 30/private | JI |
| Huang, et al. [19] | F | 2020 | Deep CNNs | 325/private + 562/public | TPR, FPR, JI, DSC, AER, AHE, AME |
| Huang, et al. [20] | F | 2018 | Deep CNNs + CRF | 325/private | TPR, FPR, IoU |
| Shareef, et al. [21] | F | 2020 | Deep CNNs | 725/public | TPR, FPR, JI, DSC, AER, AHE, AME |
| Liu, et al. [22] | S | 2012 | Cellular automata | 205/private | TPR, FPR, FNR, SI |
| Gómez, et al. [23] | S | 2010 | Watershed | 50/private | Overlap ratio, NRV and PD |
| Metrics | LRs | Area Error Metrics | Boundary Error Metrics | Time | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Methods | Ave. TPR | Ave. FPR | Ave. JI | Ave. DSC | Ave. AER | Ave. HE | Ave. MAE | Ave. Time (s) | ||
| [4] | 1.1 | 0.73 (0.23) | 0.08 (0.09) | 0.67 (0.20) | 0.78 (0.18) | 0.35 (0.22) | 45.4 (31.6) | 12.6 (10.9) | 18 | |
| 1.3 | 0.79 (0.18) | 0.10 (0.12) | 0.72 (0.16) | 0.82 (0.14) | 0.31 (0.19) | 42.2 (28.0) | 10.9 (8.9) | 22 | ||
| 1.5 | 0.82 (0.15) | 0.13 (0.14) | 0.73 (0.14) | 0.84 (0.11) | 0.31 (0.18) | 44.0 (28.3) | 10.4 (7.5) | 27 | ||
| 1.7 | 0.83 (0.15) | 0.17 (0.18) | 0.73 (0.14) | 0.83 (0.12) | 0.33 (0.20) | 48.3 (32.2) | 10.9 (8.0) | 27 | ||
| 1.9 | 0.85 (0.14) | 0.20 (0.21) | 0.72 (0.14) | 0.83 (0.12) | 0.36 (0.23) | 51.3 (35.3) | 11.2 (7.9) | 30 | ||
| 2.1 | 0.86 (0.14) | 0.24 (0.25) | 0.71 (0.15) | 0.82 (0.13) | 0.39 (0.27) | 54.9 (38.8) | 11.7 (8.4) | 30 | ||
| 2.3 | 0.86 (0.13) | 0.27 (0.28) | 0.70 (0.15) | 0.82 (0.12) | 0.41 (0.29) | 57.0 (41.7) | 12.1 (8.8) | 36 | ||
| 2.5 | 0.87 (0.14) | 0.32 (0.33) | 0.69 (0.16) | 0.80 (0.13) | 0.46 (0.34) | 61.3 (44.2) | 13.1 (10.5) | 39 | ||
| 2.7 | 0.87 (0.14) | 0.35 (0.36) | 0.68 (0.17) | 0.79 (0.14) | 0.48 (0.36) | 62.1 (43.3) | 13.4 (9.5) | 40 | ||
| 2.9 | 0.86 (0.17) | 0.40 (0.41) | 0.66 (0.19) | 0.77 (0.17) | 0.54 (0.44) | 66.2 (46.1) | 14.6 (10.7) | 44 | ||
| [22] | 1.1 | 0.70 (0.10) | 0.01 (0.02) | 0.70 (0.09) | 0.82 (0.07) | 0.31 (0.09) | 35.8 (17.0) | 11.1 (5.3) | 487 | |
| 1.3 | 0.76 (0.09) | 0.02 (0.03) | 0.75 (0.08) | 0.85 (0.06) | 0.26 (0.09) | 32.0 (15.6) | 9.1 (4.6) | 467 | ||
| 1.5 | 0.79 (0.08) | 0.03 (0.04) | 0.77 (0.08) | 0.87 (0.05) | 0.23 (0.09) | 29.9 (15.0) | 8.1 (4.2) | 351 | ||
| 1.7 | 0.82 (0.09) | 0.05 (0.06) | 0.79 (0.09) | 0.88 (0.06) | 0.23 (0.10) | 29.5 (16.5) | 7.8 (4.8) | 341 | ||
| 1.9 | 0.84 (0.09) | 0.07 (0.07) | 0.79 (0.09) | 0.88 (0.06) | 0.23 (0.11) | 29.0 (17.0) | 7.6 (5.3) | 336 | ||
| 2.1 | 0.86 (0.08) | 0.10 (0.09) | 0.79 (0.10) | 0.88 (0.07) | 0.24 (0.13) | 29.5 (18.4) | 7.7 (5.2) | 371 | ||
| 2.3 | 0.87 (0.09) | 0.13 (0.12) | 0.78 (0.11) | 0.87 (0.08) | 0.26 (0.16) | 31.3 (21.9) | 8.3 (6.4) | 343 | ||
| 2.5 | 0.89 (0.09) | 0.16 (0.14) | 0.77 (0.11) | 0.87 (0.08) | 0.28 (0.17) | 31.9 (20.1) | 8.5 (6.1) | 365 | ||
| 2.7 | 0.90 (0.09) | 0.20 (0.15) | 0.75 (0.11) | 0.85 (0.08) | 0.31 (0.18) | 34.1 (20.2) | 9.2 (5.9) | 343 | ||
| 2.9 | 0.90 (0.10) | 0.25 (0.18) | 0.73 (0.12) | 0.84 (0.10) | 0.35 (0.22) | 36.9 (21.8) | 10.2 (6.7) | 388 | ||
| Metrics | Area Error Metrics | Boundary Error Metrics | Time | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Methods | Ave. TPR | Ave. FPR | Ave. JI | Ave. DSC | Ave. AER | Ave. HE | Ave. MAE | Ave. Time (s) | |
| FCN-AlexNet [60] | 0.95/-- | 0.34/-- | 0.74/-- | 0.84/-- | 0.39/-- | 25.1/-- | 7.1/-- | 5.8 | |
| SegNet [61] | 0.94/-- | 0.16/-- | 0.82/-- | 0.89/-- | 0.22/-- | 21.7/-- | 4.5/-- | 12.1 | |
| U-Net [55] | 0.92/-- | 0.14/-- | 0.83/-- | 0.90/-- | 0.22/-- | 26.8/-- | 4.9/-- | 2.15 | |
| CE-Net [66] | 0.91/-- | 0.13/-- | 0.83/-- | 0.90/-- | 0.22/-- | 21.6/-- | 4.5/-- | 2.0 | |
| MultiResUNet [65] | 0.93/-- | 0.11/-- | 0.84/-- | 0.91/-- | 0.19/-- | 18.8/-- | 4.1/-- | 6.5 | |
| RDAU NET [63] | 0.91/-- | 0.11/-- | 0.84/-- | 0.91/-- | 0.19/-- | 19.3/-- | 4.1/-- | 3.5 | |
| SCAN [64] | 0.91/-- | 0.11/-- | 0.83/-- | 0.90/-- | 0.20/-- | 26.9/-- | 4.9/-- | 4.1 | |
| DenseU-Net [67] | 0.91/-- | 0.16/-- | 0.81/-- | 0.88/-- | 0.25/-- | 25.3/-- | 5.5/-- | 3.5 | |
| STAN [21] | 0.92/-- | 0.09/-- | 0.85/-- | 0.91/-- | 0.18/-- | 18.9/-- | 3.9/-- | 5.8 | |
| Xian, et al. [5] | 0.81/0.91 | 0.16/0.10 | 0.72/0.84 | 0.83/-- | 0.36/-- | 49.2/24.4 | 12.7/5.8 | 3.5 | |
| Shan, et al. [15] | 0.81/0.93 | 1.06/0.13 | 0.60/-- | 0.70/-- | 1.25/-- | 107.6/18.9 | 26.6/5.0 | 3.0 | |
| Shao, et al. [6] | 0.67/0.81 | 0.18/0.12 | 0.61/0.74 | 0.71/-- | 0.51/-- | 69.2/50.2 | 21.3/13.4 | 3.5 | |
| Fuzzy FCN [62] | 0.94/-- | 0.08/-- | 0.88/-- | 0.92/-- | 0.14/-- | 19.8/-- | 4.2/-- | 6.0 | |
| Huang, et al. [19] | 0.93/0.93 | 0.07/0.07 | 0.87/0.87 | 0.93/0.93 | 0.15/0.15 | 26.0/26.0 | 4.9/4.9 | 6.5 | |
| Liu, et al. [4] LR = 1.5 | 0.82/0.94 | 0.13/0.08 | 0.73/0.87 | 0.84/-- | 0.31/-- | 44.0/26.3 | 10.4/-- | 27.0 | |
| Liu, et al. [22] LR = 1.9 | 0.84/0.94 | 0.07/0.07 | 0.79/0.88 | 0.88/-- | 0.23/-- | 29.0/25.1 | 7.6/-- | 336.0 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Xian, M.; Cheng, H.-D.; Shareef, B.; Ding, J.; Xu, F.; Huang, K.; Zhang, B.; Ning, C.; Wang, Y. BUSIS: A Benchmark for Breast Ultrasound Image Segmentation. Healthcare 2022, 10, 729. https://doi.org/10.3390/healthcare10040729
Zhang Y, Xian M, Cheng H-D, Shareef B, Ding J, Xu F, Huang K, Zhang B, Ning C, Wang Y. BUSIS: A Benchmark for Breast Ultrasound Image Segmentation. Healthcare. 2022; 10(4):729. https://doi.org/10.3390/healthcare10040729
Chicago/Turabian StyleZhang, Yingtao, Min Xian, Heng-Da Cheng, Bryar Shareef, Jianrui Ding, Fei Xu, Kuan Huang, Boyu Zhang, Chunping Ning, and Ying Wang. 2022. "BUSIS: A Benchmark for Breast Ultrasound Image Segmentation" Healthcare 10, no. 4: 729. https://doi.org/10.3390/healthcare10040729
APA StyleZhang, Y., Xian, M., Cheng, H. -D., Shareef, B., Ding, J., Xu, F., Huang, K., Zhang, B., Ning, C., & Wang, Y. (2022). BUSIS: A Benchmark for Breast Ultrasound Image Segmentation. Healthcare, 10(4), 729. https://doi.org/10.3390/healthcare10040729