
Real-Time Tracking of Human Neck Postures and Movements


Abstract
:1. Introduction
Motivation and Proposed Work
2. Materials and Methods
2.1. Kinematic Data Acquisition Using Smart Neckband
2.1.1. IMU Neck Band
- o Weight: 5.66 g;
- o Battery: 200 mAH coin battery;
- o Usage modes: 8–24 h (stream), 2–48 h (log);
- o Data Transfer: Bluetooth Low Energy Smart (BLE);
- o Flash Memory: 8 MB.
- o Built-in sensors:
- Range: ±2, ±4, ±8, ±16 g;
- Resolution: 16 bit;
- Sampling Rate: 0.001 Hz–100 Hz stream–800 Hz log.
- Range: ±125, ±250, ±500, ±1000, ±2000°/s, Resolution: 16 bit;
- Sampling Rate: 0.001 Hz–100 Hz stream–800 Hz log.
- Range: ±1300 μT (x,y-axis), ±2500 μT (z-axis);
- Resolution: 0.3 μT;
- Sampling Rate: 0.001 Hz–25 Hz.
2.1.2. Mobile Application—MetaBase
2.1.3. Sensor Data Format
- Accelerometer sensor: epoch(ms), -> time, elapsed(s), x(g), y(g), z(g);
- Gyroscope sensor: epoch(ms), -> time, elapsed(s), x(deg/s), y(deg/s), z(deg/s);
- Magnetometer: epoch (ms), -> time, elapsed(s), x(T), y(T), z(T), etc.
2.2. Kinetic Data Generation Using the OpenSim-Based Neck Musculoskeletal Model
2.2.1. OpenSim—Simulation Modeling Tool and Its Features
Built-In Tools and Its Features
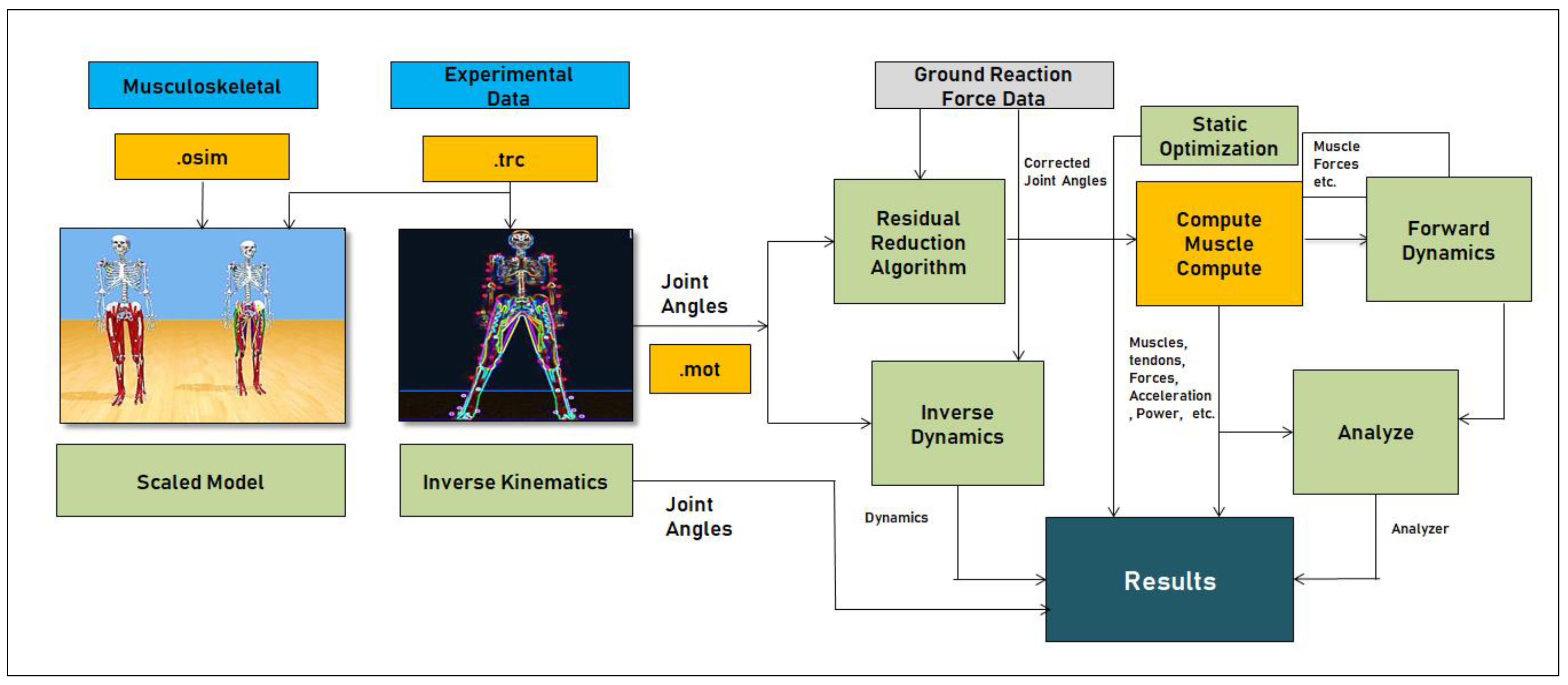
- Scale: In OpenSim, Scale is a built-in tool, which is used to create user-specific musculoskeletal models, mainly used to adjust the dimensions of the skeletal system in terms of Mass. In the Scale tool, we can adjust the Scale factors and static pose weights. In this tool, we must give marker data for measurement as input. From the scale, the output is the .osim file, which is the main source file.
- Inverse Kinematics (IK): In OpenSim, Inverse Kinematics is a built-in tool, which is used to generate the Inverse Kinematics of the musculoskeletal system concerning joint movements. The input for this tool is three-dimensional coordinate data which are in .trc file format (track row–column). This input file gives information about the joint movements with respect to time in three dimensions (x,y,z). Based on this input, the IK tool will generate the motion; we can observe this in GUI—Graphical User Interface in the OpenSim tool. The output of this tool is the .mot file, which consists of information about the joint’s motion concerning time.
- Inverse Dynamics (ID): The Inverse Dynamic tool (ID) is used to determine the net forces and torques of joints, which are responsible for movement generation. IK tool output, i.e., .mot file motion file and ground reaction forces data in the .xml format, are fed to the ID tool as input sources. ID tool will perform the mass-dependent acceleration functions and generate the forces based on the conventional F = ma equation. The output of the ID tool is Inverse Dynamics.sto (ID-State storage file).
- Residual Reduction (RR): It is a built-in tool that works like Forward Dynamics and uses a tracking controller to follow kinematics extracted from the IK tool—nothing but movements.
- Static Optimization (STO): This tool helps to obtain muscle forces and activations at each instance in time. For this tool, input will be a .mot file—motion file and generates muscle forces and activations the format of .sto.
- Computed Muscle Control (CMC): This tool is a major block in the OpenSim software, which computes muscle excitations, joint movements such as kinematics, and kinetics of each component present in the musculoskeletal model. This tool generates .sto files for muscles, joints, and ligaments—active and passive fibers, power, length, forces, accelerations, and positions, etc.
- Analyze: This tool helps to analyze the model based on its simulation. If the duration of the simulation is long in terms of time, the Opting Analyze tool is the best option compared to the CMC tool. This tool helps to obtain accurate results in less time on the already simulated use case.
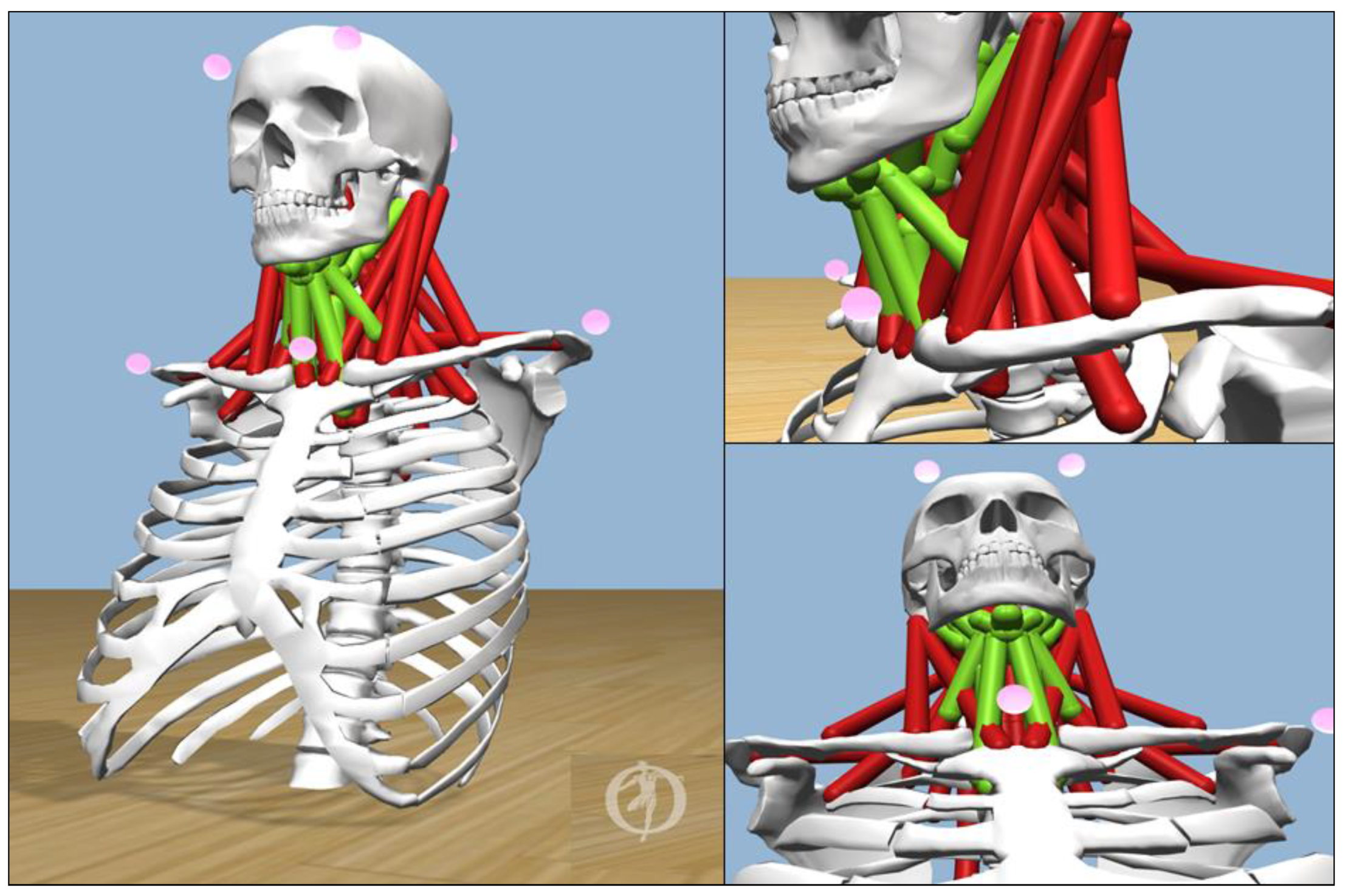
2.2.2. Neck Musculoskeletal Model
2.3. Experiments and Research Analysis
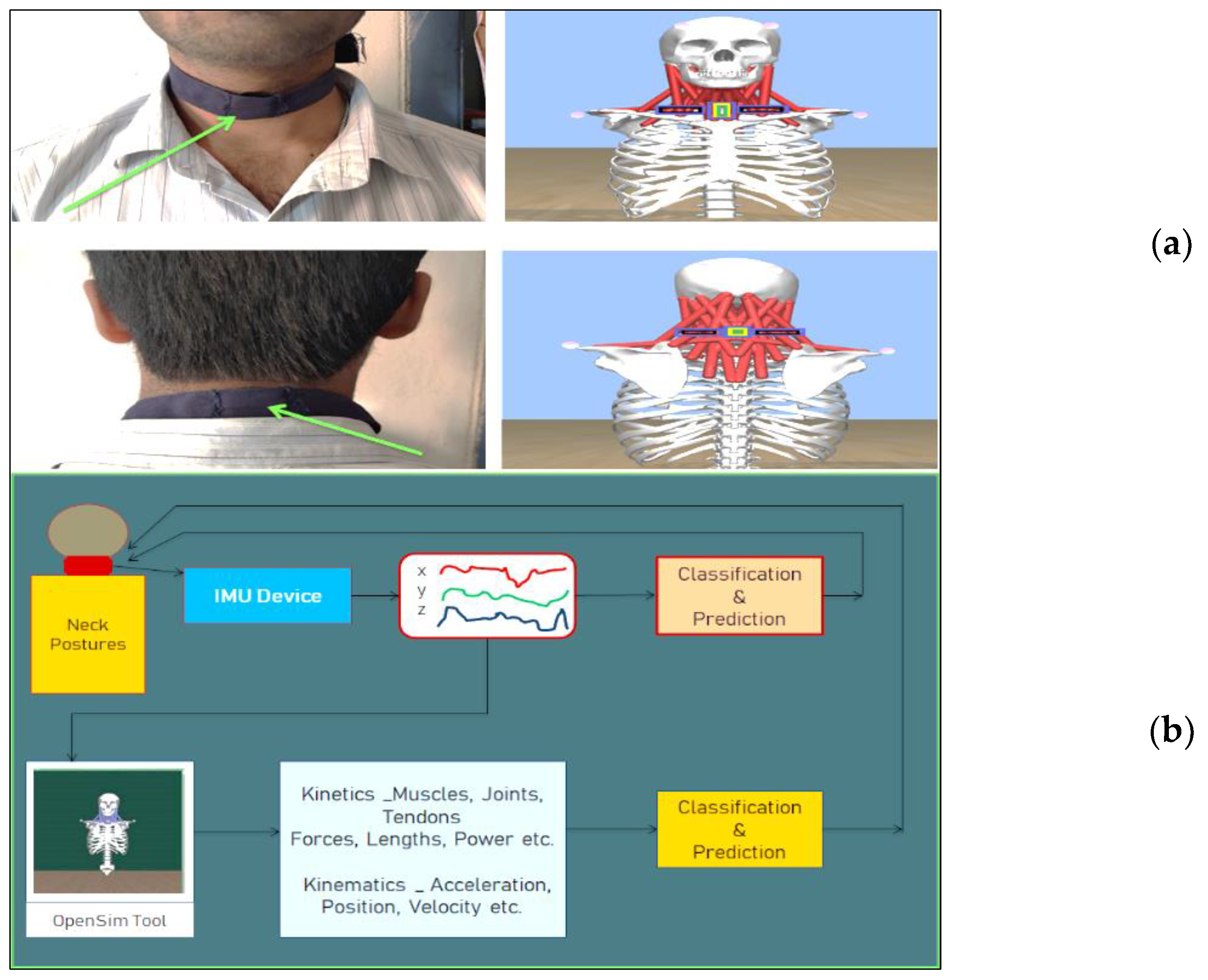
2.3.1. Experimental Study for the Location of IMU
2.3.2. IMU Data Integration with OpenSim
- The IMU-based accelerometer sensor data format provides three-dimensional kinematic data (x,y,z).
- To export IMU kinematic data into the OpenSim simulation tool, mathematical and functional analysis is required. In OpenSim, a file with the extension .trc (track row–column) is used as an input file for the Inverse Kinematics (IK) tool, and this tool provides joint movement data as a motion file with the extension mot’.
- The neck-skeletal model has seven sets of markers around the skull and cervical region (four on the skull, one at the Sternum Jugular Notch, and two at the right and left acromioclavicular joints). The marker Sternum Jugular Notch (SJN) is located on the front side of the neck. The IMU-based kinematics data are mapped onto the x,y,z coordinates of SJN. The other markers are calibrated according to the functional movements. The .trc file contains the details of these markers, and it is the input file for the Inverse Kinematics (IK), and the motion file (.mot) is obtained as the output.
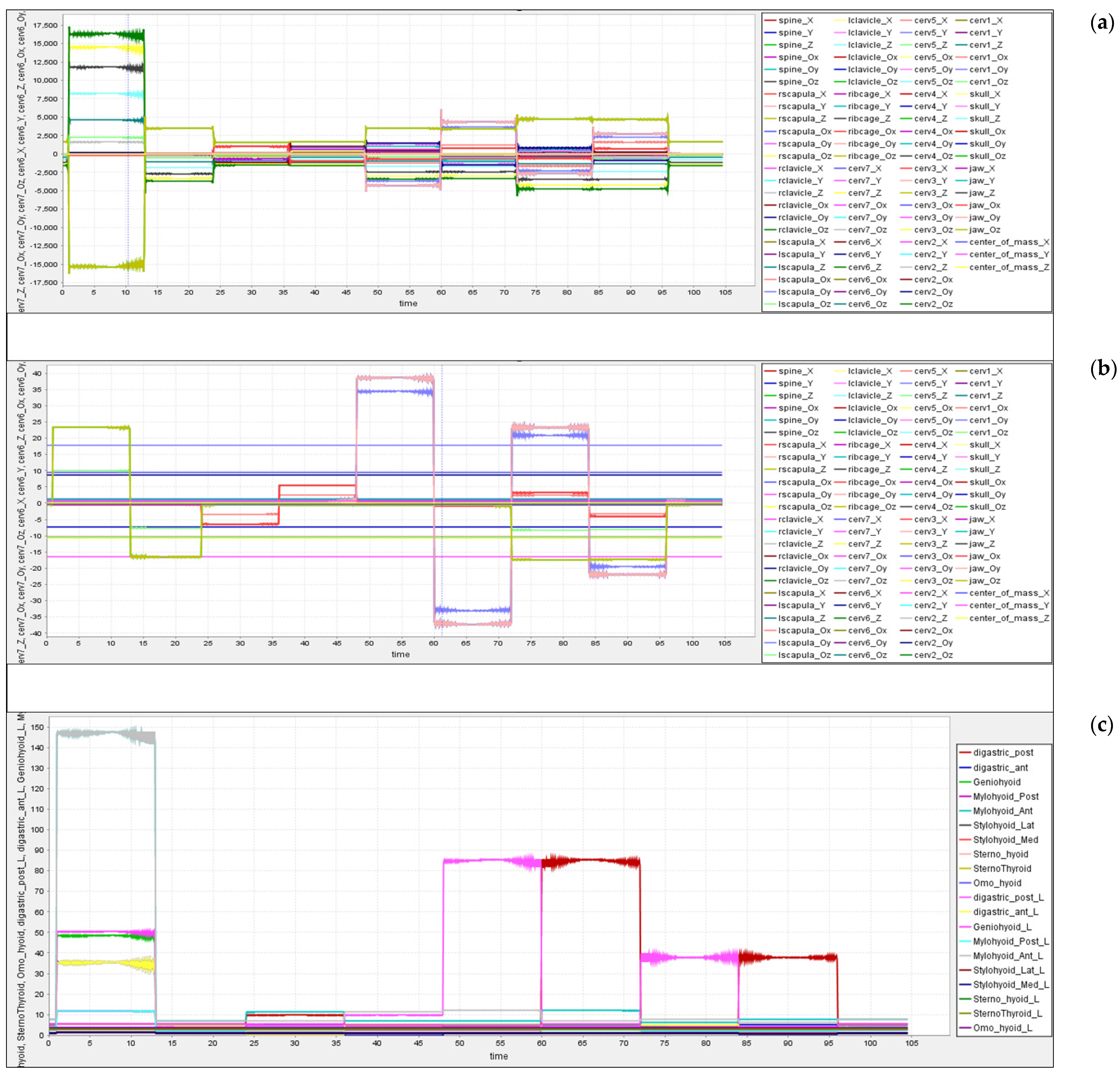
- The information in this .mot file is fed as input to the Computed Muscle Control (CMC) tool, which produces the data related to neck kinematics, kinetics, joints, muscles, forces, etc.
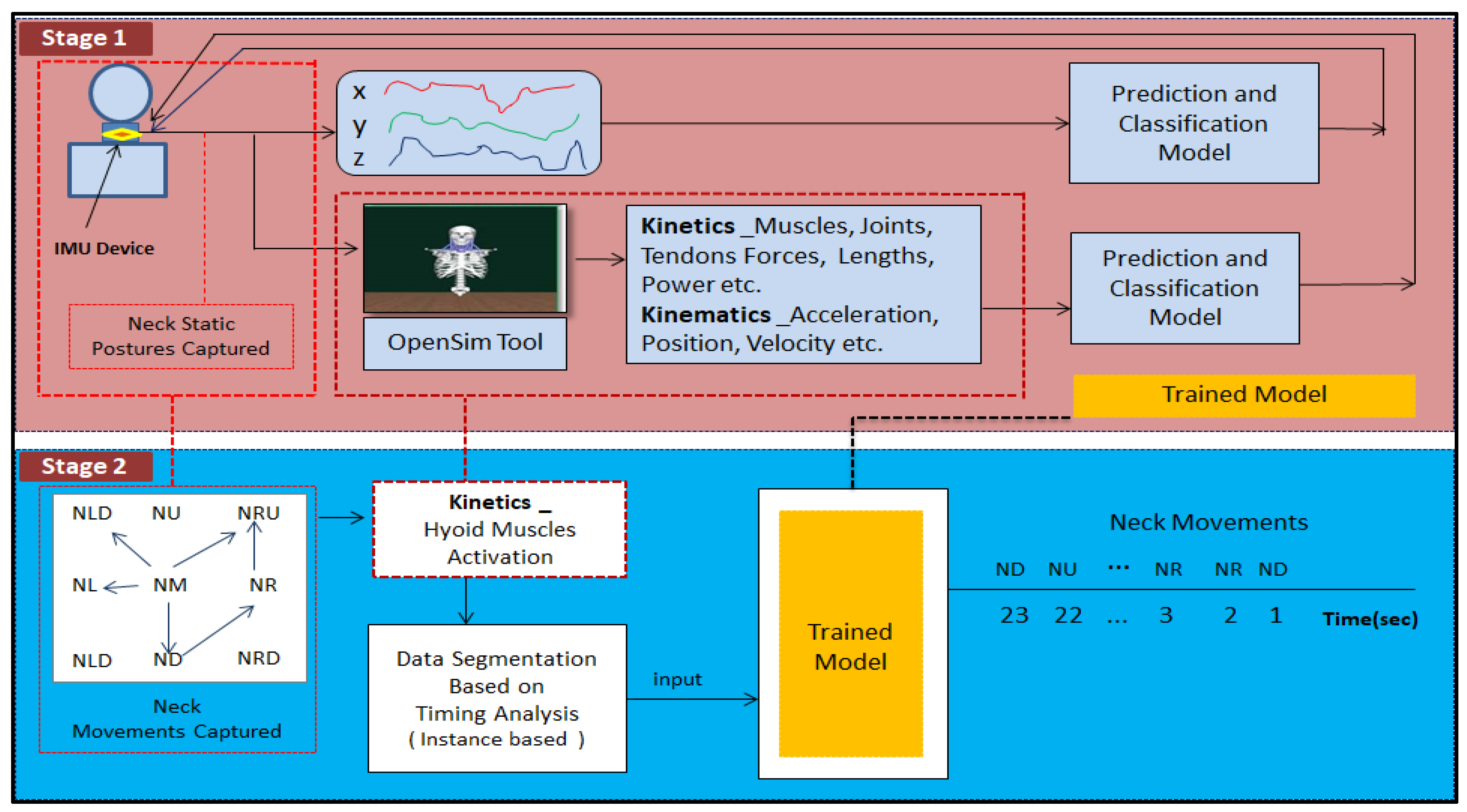
- The functional integration of IMU data and OpenSim is shown in Figure 5b. Available results were interpreted, outliers were removed, and data were normalized.
2.3.3. Smart Neckband—Comfort Level
2.4. Predictive Analysis Using Machine-Learning Algorithms
2.4.1. Machine-Learning Algorithms Used in This Research
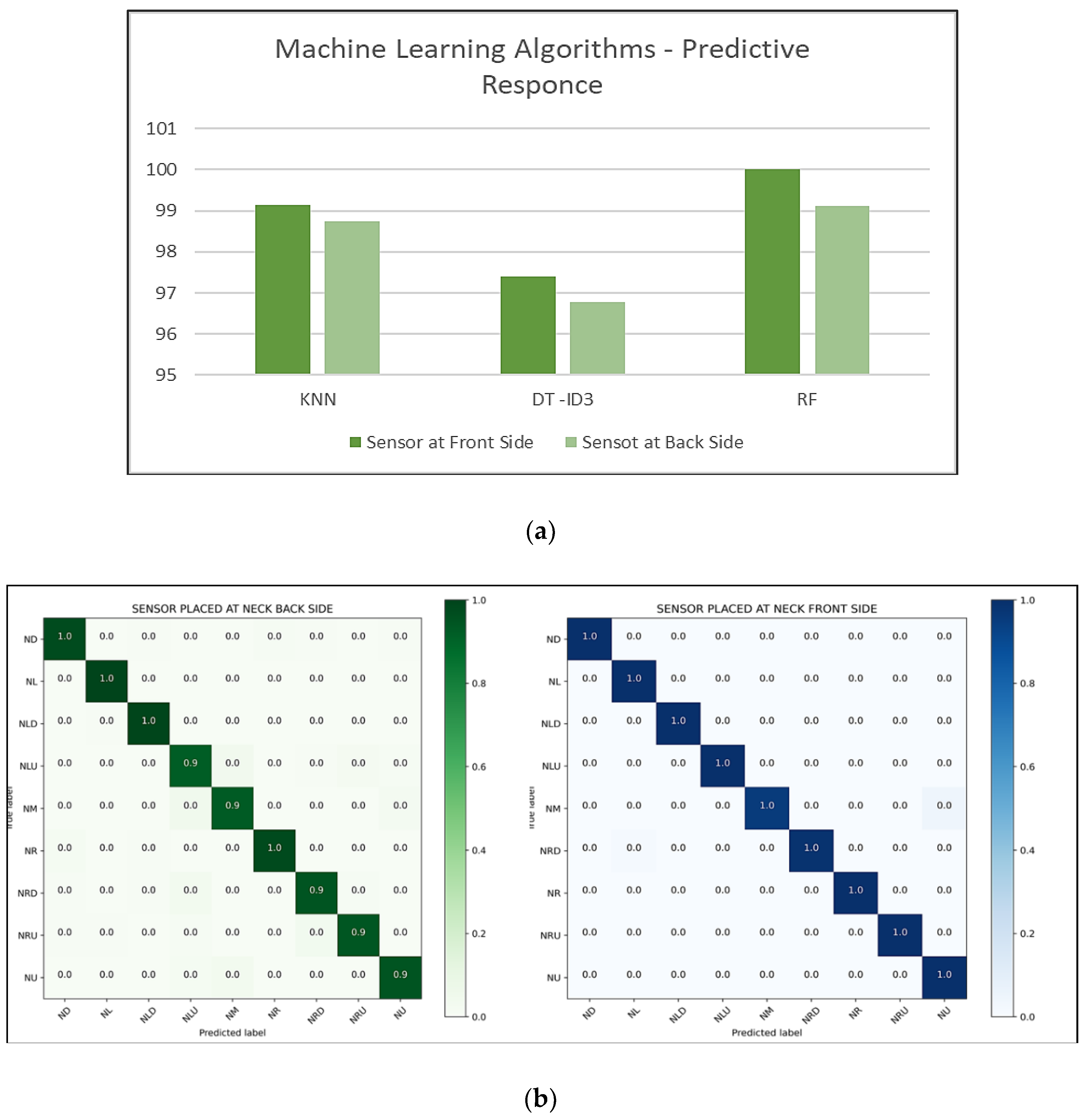
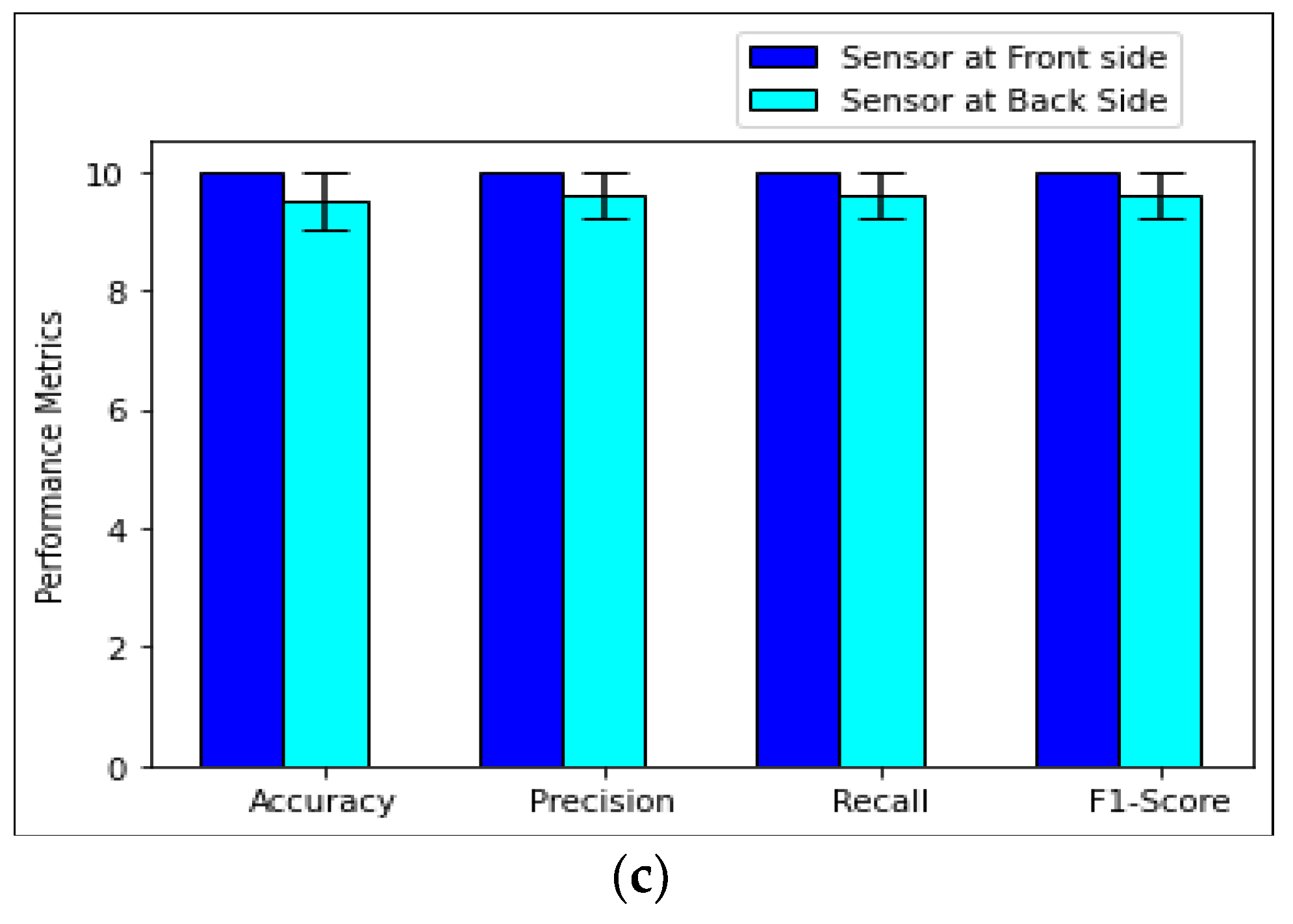
2.4.2. Algorithmic Responses—Result Analysis
3. Results
3.1. Robust Integration of Kinematic and Kinetic Data
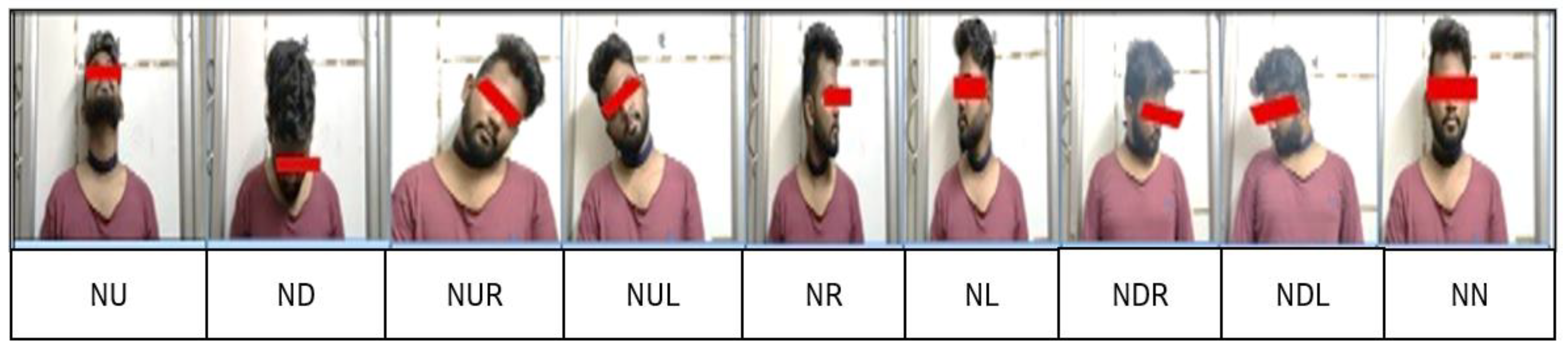
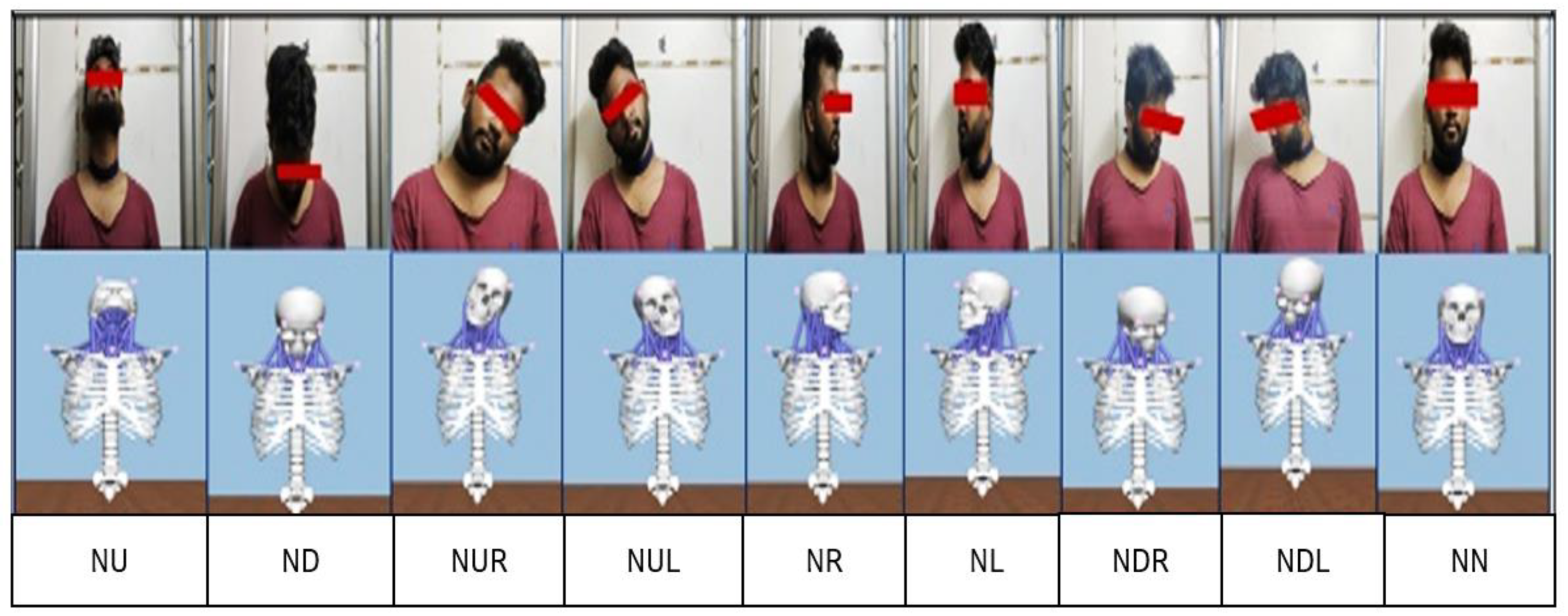
3.2. Subject-Specific Neck Postures
3.3. OpenSim—Neck-Musculoskeletal-Model-Based Kinematic and Kinetic Data Analysis
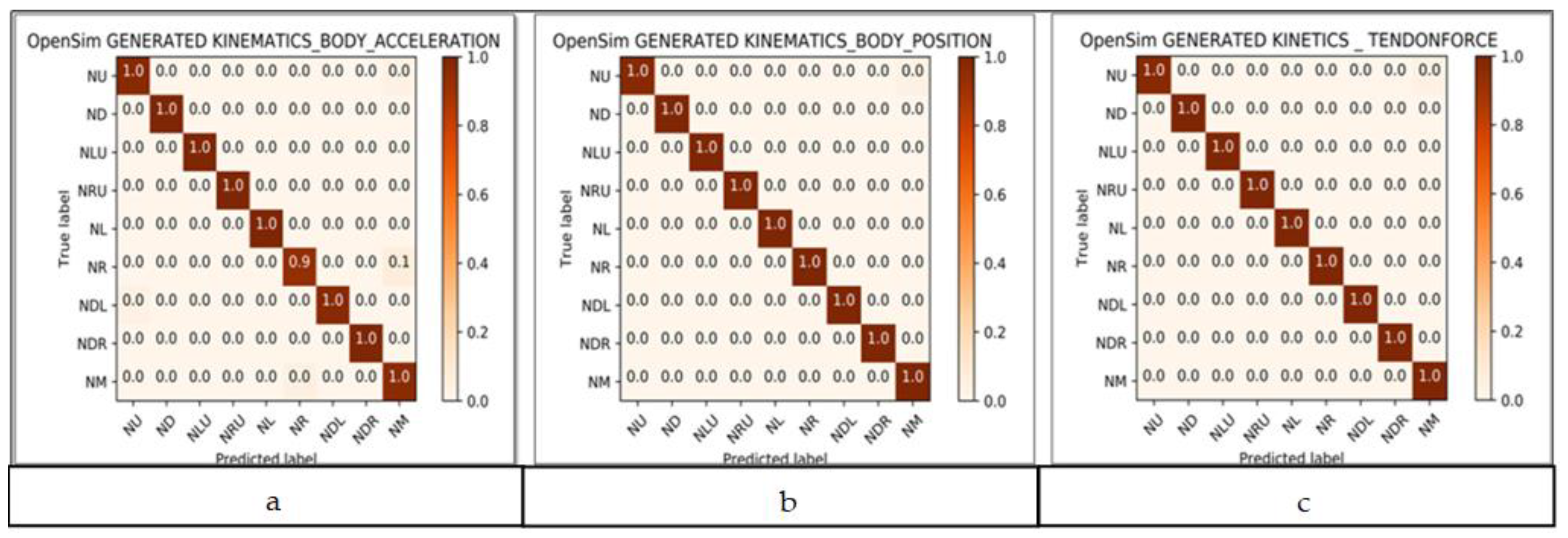
3.4. Predictive Analysis—Kinematics and Kinetics
4. Validation—Use Case Model: A Predictive Model for Rehabilitation Monitoring and Assessment Based on Neck Movements
4.1. Rehabilitation
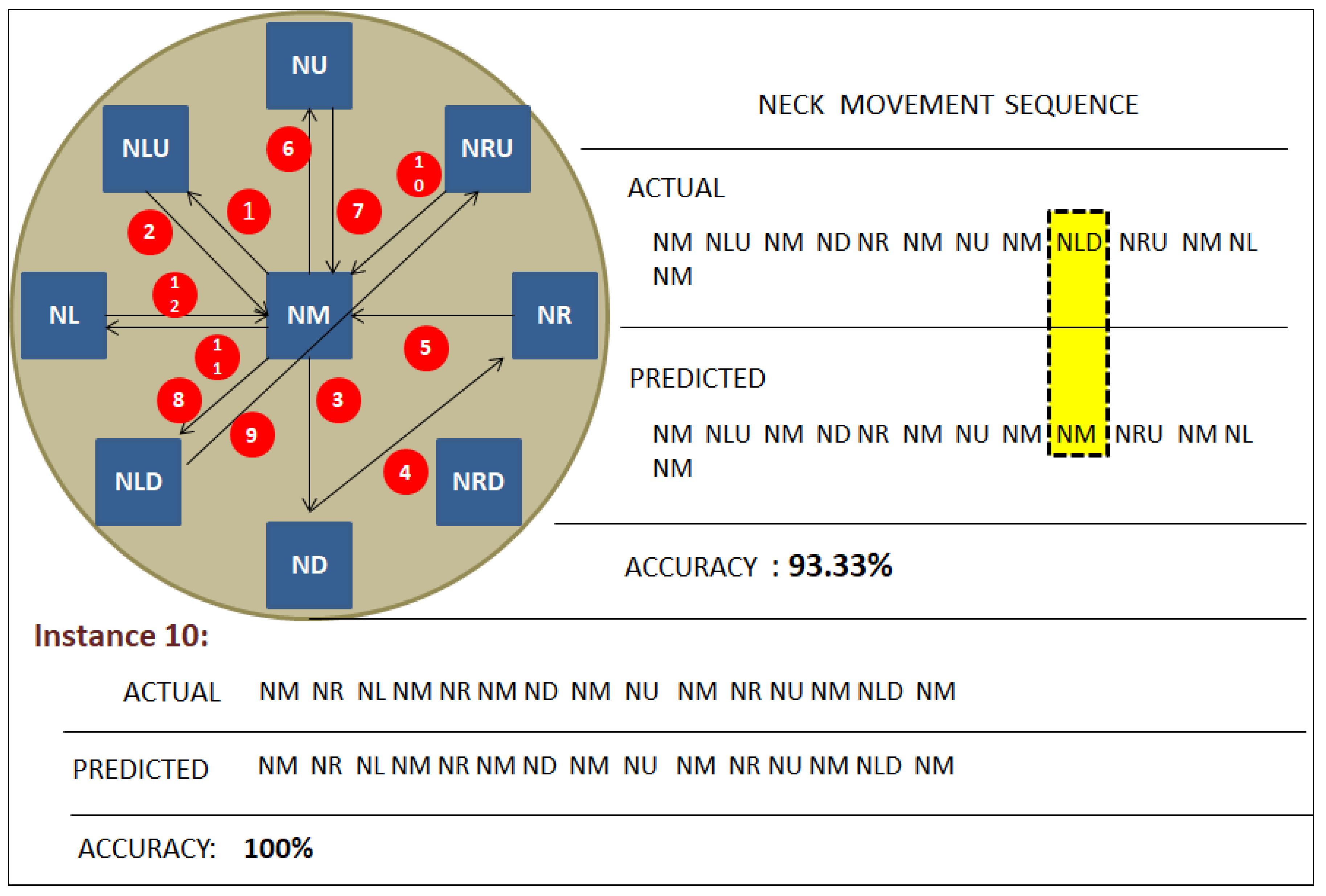
4.2. Neck Movements
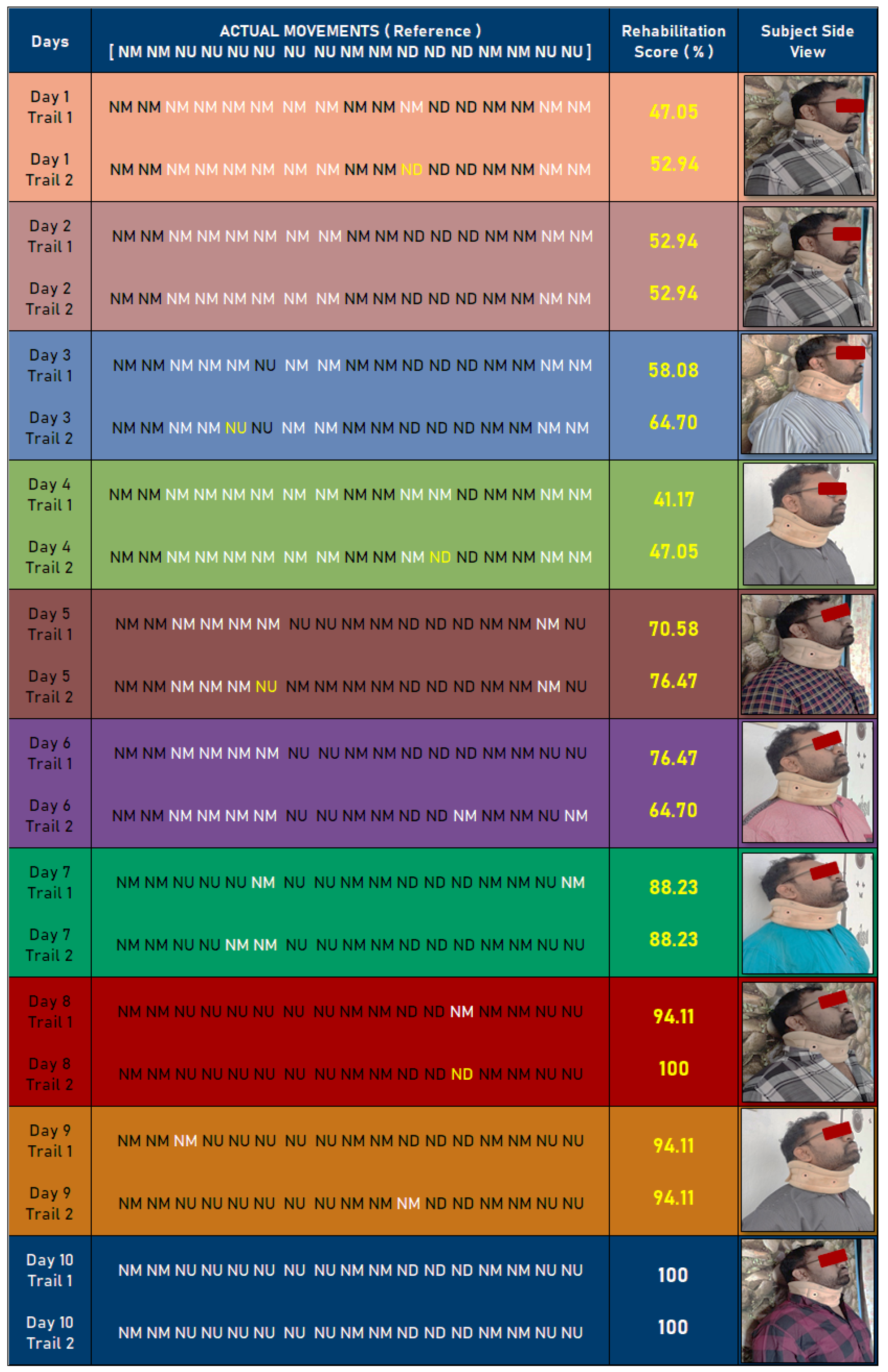
4.3. Rehabilitation Monitoring System—Methodology and Results
4.4. Observations
4.5. Experimental Use Case—Rehabilitation Scoring System Using Synthetic Data
4.6. State of the Art: Objective vs. Research Flow
4.7. Future Scope
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ribeiro, P.C.; Santos-Victor, J.; Lisboa, P. Human activity recognition from video: Modeling, feature selection and classification architecture. In Proceedings of the International Workshop on Human Activity Recognition and Modelling (HAREM), Oxford, UK, 9 September 2005. [Google Scholar]
- Crook, P.; Kellokumpu, V.; Zhao, G.; Pietikainen, M. Human Activity Recognition Using a Dynamic Texture Based Method. In Proceedings of the British Machine Vision Conference, Leeds, UK, 1–4 September 2008. [Google Scholar]
- Biswas, K.K.; Basu, S.K. Gesture recognition using Microsoft Kinect. In Proceedings of the 5th International Conference on Automation, Robotics and Applications, Wellington, New Zealand, 6–8 December 2011; pp. 100–103. [Google Scholar]
- Nandy, A.; Chakraborty, R.; Chakraborty, P. Cloth invariant gait recognition using pooled segmented statistical features. Neurocomputing 2016, 191, 117–140. [Google Scholar] [CrossRef]
- Balakrishnan, R.; Chinnavan, E.; Feii, T. An extensive usage of hand held devices will lead to musculoskeletal disorder of upper extremity among student in AMU: A survey method. Int. J. Phys. Educ. Sport Health 2016, 3, 368–372. [Google Scholar]
- Caron, N.; Caderby, T.; Peyrot, N.; Verkindt, C.; Dalleau, G. Validation of a method for estimating energy expenditure during walking in middle-aged adults. Eur. J. Appl. Physiol. 2018, 118, 381–388. [Google Scholar] [CrossRef] [PubMed]
- Kadaba, M.P.; Ramakrishnan, H.K.; Wootten, M.E.; Gainey, J.; Gorton, G.; Cochran, G.V.B. Repeatability of kinematic, kinetic, and electromyographic data in normal adult gait. J. Orthop. Res. 1989, 7, 849–860. [Google Scholar] [CrossRef] [PubMed]
- Pizzolato, S.; Tagliapietra, L.; Cognolato, M.; Reggiani, M.; Müller, H.; Atzori, M. Comparison of six electromyography acquisition setups on hand movement classification tasks. PLoS ONE 2017, 12, e0186132. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahamed, N.U.; Taha, Z.; Alqahtani, M.; Altwijri, O.; Rahman, M.; Deboucha, A. Age Related Differences in the Surface EMG Signals on Adolescent’s Muscle during Contraction. In Proceedings of the IOP Conference Series: Materials Science and Engineering Malaysia & Indonesia, Bandung, Indonesia, 16–18 November 2016. [Google Scholar]
- Seel, T.; Raisch, J.; Schauer, T. IMU-based joint angle measurement for gait analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shiroma, E.J.; Schepps, M.; Harezlak, J.; Chen, K.Y.; E. Matthews, C.; Koster, A.; Caserotti, P.; Glynn, N.W.; Harris, T.B. Daily physical activity patterns from hip- and wrist-worn accelerometers. Physiol. Meas. 2016, 37, 1852–1861. [Google Scholar] [CrossRef] [PubMed]
- Moncada-Torres, A.; Leuenberger, K.; Gonzenbach, R.; Luft, A.; Gassert, R. Activity classification based on inertial and barometric pressure sensors at different anatomical locations. Physiol. Meas. 2014, 35, 1245–1263. [Google Scholar] [CrossRef]
- Nguyen, N.D.; Truong, P.H.; Jeong, G.-M. Daily wrist activity classification using a smart band. Physiol. Meas. 2017, 38, L10–L16. [Google Scholar] [CrossRef]
- Mifsud, N.L.; Kristensen, N.H.; Villumsen, M.; Hansen, J.; Kersting, U.G. Portable inertial motion unit for continuous assessment of in-shoe foot movement. Procedia Eng. 2014, 72, 208–213. [Google Scholar] [CrossRef] [Green Version]
- Crema, C.; Depari, A.; Flammini, A.; Sisinni, E.; Haslwanter, T.; Salzmann, S. IMU-based solution for automatic detection and classification of exercises in the fitness scenario. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–6. [Google Scholar]
- Georgi, M.; Amma, C.; Schultz, T. Recognizing Hand and Finger Gestures with IMU based Motion and EMG based Muscle Activity Sensing. In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS), Lisbon, Portugal, 12–15 January 2015. [Google Scholar]
- Chavarriaga, R.; Sagha, H.; Calatroni, A.; Digumarti, S.T.; Tröster, G.; Millan, J.D.R.; Roggen, D. The Opportunity challenge: A benchmark database for on-body sensor-based activity recognition. Pattern Recognit. Lett. 2013, 34, 2033–2042. [Google Scholar] [CrossRef] [Green Version]
- Kanteshwari, K.; Sridhar, R.; Mishra, A.K.; Shirahatti, R.; Maru, R.; Bhusari, P. Correlation of awareness and practice of working postures with prevalence of musculoskeletal disorders among dental professionals. Gen. Dent. 2012, 59, 476–483. [Google Scholar]
- Molsted, S.; Tribler, J.; Snorgaard, O. Musculoskeletal pain in patients with type 2 diabetes. Diabetes Res. Clin. Pr. 2012, 96, 135–140. [Google Scholar] [CrossRef]
- Stefánsdóttir, R.; Gudmundsdottir, S.L. Sedentary behavior and musculoskeletal pain: A five-year longitudinal Icelandic study. Public Health 2017, 149, 71–73. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bau, J.-G.; Chia, T.; Wei, S.-H.; Li, Y.-H.; Kuo, F.-C. Correlations of Neck/Shoulder Perfusion Characteristics and Pain Symptoms of the Female Office Workers with Sedentary Lifestyle. PLoS ONE 2017, 12, e0169318. [Google Scholar] [CrossRef]
- Baker, R.; Coenen, P.; Howie, E.; Williamson, A.; Straker, L. The Short Term Musculoskeletal and Cognitive Effects of Prolonged Sitting During Office Computer Work. Int. J. Environ. Res. Public Health 2018, 15, 1678. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Citko, A.; Górski, S.; Marcinowicz, L.; Górska, A. Sedentary Lifestyle and Nonspecific Low Back Pain in Medical Personnel in North-East Poland. BioMed. Res. Int. 2018, 2018, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Sakakima, H.; Takada, S.; Norimatsu, K.; Otsuka, S.; Nakanishi, K.; Tani, A. Diurnal Profiles of Locomotive and Household Activities Using an Accelerometer in Community-Dwelling Older Adults with Musculoskeletal Disorders: A Cross-Sectional Survey. Int. J. Environ. Res. Public Health 2020, 17, 5337. [Google Scholar] [CrossRef] [PubMed]
- Park, J.H.; Moon, J.H.; Kim, H.J.; Kong, M.H.; Oh, Y.H. Sedentary Lifestyle: Overview of updated evidence of potential health risks. Korean J. Fam. Med. 2020, 41, 365–373. [Google Scholar] [CrossRef]
- David, D.; Giannini, C.; Chiarelli, F.; Mohn, A. Text neck syndrome in children and adolescents. Int. J. Environ. Res. Public Health 2021, 18, 1565. [Google Scholar] [CrossRef] [PubMed]
- Chu, E.; Butler, K. Resolution of Gastroesophageal Reflux Disease Following Correction for Upper Cross Syndrome—A case study and brief review. Clin. Pr. 2021, 11, 322–326. [Google Scholar] [CrossRef]
- Kumar, K.V.R.; Elias, S. Smart Neck-Band for Rehabilitation of Musculoskeletal Disorders. In Proceedings of the 2020 International Conference on COMmunication Systems & NETworkS (COMSNETS), Bengaluru, India, 7–11 January 2020. [Google Scholar]
- Dobell, A.; Eyre, E.L.J.; Tallis, J.; Chinapaw, M.; Altenburg, T.M.; Duncan, M.J. Examining accelerometer validity for estimating physical activity in pre-schoolers during free-living activity. Scand. J. Med. Sci. Sports 2019, 29, 1618–1628. [Google Scholar] [CrossRef] [PubMed]
- Smith, C.; Galland, B.; Taylor, R.; Meredith-Jones, K. ActiGraph GT3X+ and actical wrist and hip worn accelerometers for sleep and wake indices in young children using an automated algorithm: Validation with polysomnography. Front. Psychiatry 2020, 10, 958. [Google Scholar] [CrossRef]
- Puerma-Castillo, M.C.; García-Ríos, M.C.; Pérez-Gómez, M.E.; Aguilar-Ferrándiz, M.E.; Peralta-Ramírez, M.I. Effectiveness of kinesio taping in addition to conventional rehabilitation treatment on pain, cervical range of motion and quality of life in patients with neck pain: A randomized controlled trial. J. Back Musculoskelet. Rehabil. 2018, 31, 453–464. [Google Scholar] [CrossRef] [PubMed]
- Raya, R.; Garcia-Carmona, R.; Sanchez, C.; Urendes, E.; Ramirez, O.; Martin, A.; Otero, A. An inexpensive and easy to use cervical range of motion measurement solution using inertial sensors. Sensors 2018, 18, 2582. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoon, T.-L.; Kim, H.-N.; Min, J.-H. Validity and reliability of an inertial measurement unit–based 3-dimensional angular measurement of cervical range of motion. J. Manip. Physiol. Ther. 2019, 42, 75–81. [Google Scholar] [CrossRef] [Green Version]
- Moghaddas, D.; de Zoete, R.M.J.; Edwards, S.; Snodgrass, S.J. Differences in the kinematics of the cervical and thoracic spine during functional movement in individuals with or without chronic neck pain: A systematic review. Physiotherapy 2019, 105, 421–433. [Google Scholar] [CrossRef]
- Maselli, M.; Mussi, E.; Cecchi, F.; Manti, M.; Tropea, P.; Laschi, C. A Wearable sensing device for monitoring single planes neck movements: Assessment of its performance. IEEE Sens. J. 2018, 18, 6327–6336. [Google Scholar] [CrossRef]
- Delp, S.L.; Anderson, F.C.; Arnold, A.S.; Loan, P.; Habib, A.; John, C.T.; Guendelman, E.; Thelen, D.G. Open Sim: Open-source software to create and analyze dynamic simulations of movement. IEEE Trans. Biomed. Eng. 2007, 54, 1940–1950. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Seth, A.; Sherman, M.; Reinbolt, J.A.; Delp, S.L. OpenSim: A musculoskeletal modeling and simulation framework for in silico investigations and exchange. Procedia IUTAM 2011, 2, 212–232. [Google Scholar] [CrossRef]
- Seth, A.; Hicks, J.L.; Uchida, T.K.; Habib, A.; Dembia, C.L.; Dunne, J.J.; Ong, C.; Demers, M.S.; Rajagopal, A.; Millard, M.; et al. OpenSim: Simulating musculoskeletal dynamics and neuromuscular control to study human and animal movement. PLoS Comput. Biol. 2018, 14, e1006223. [Google Scholar] [CrossRef] [PubMed]
- Thelen, D.G.; Anderson, F.C. Using computed muscle control to generate forward dynamic simulations of human walking from experimental data. J. Biomech. 2006, 39, 1107–1115. [Google Scholar] [CrossRef] [PubMed]
- Mortensen, J.D.; Vasavada, A.N.; Merryweather, A.S. The inclusion of hyoid muscles improve moment generating capacity and dynamic simulations in musculoskeletal models of the head and neck. PLoS ONE 2018, 13, e0199912. [Google Scholar] [CrossRef]
- Cazzola, D.; Holsgrove, T.; Preatoni, E.; Gill, H.; Trewartha, G. Cervical Spine Injuries: A whole-body musculoskeletal model for the analysis of spinal loading. PLoS ONE 2017, 12, e0169329. [Google Scholar] [CrossRef]
- Falla, D.; Jull, G.; O’Leary, S.; Dall’Alba, P. Further evaluation of an EMG technique for assessment of the deep cervical flexor muscles. J. Electromyogr. Kinesiol. 2006, 16, 621–628. [Google Scholar] [CrossRef] [PubMed]
- Wentzel, S.E.; Konow, N.; German, R.Z. Regional differences in hyoid muscle activity and length dynamics during mammalian head shaking. J. Exp. Zoo. Part. A Ecol. Genet. Physiol. 2010, 315A, 111–120. [Google Scholar] [CrossRef] [Green Version]
- Zheng, L.; Jahn, J.; Vasavada, A.N. Sagittal plane kinematics of the adult hyoid bone. J. Biomech. 2012, 45, 531–536. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mao, S.; Zhang, Z.; Khalifa, Y.; Donohue, C.; Coyle, J.L.; Sejdic, E. Neck sensor-supported hyoid bone movement tracking during swallowing. R. Soc. Open Sci. 2019, 6, 181982. [Google Scholar] [CrossRef] [Green Version]
- Hannan, A.; Shafiq, M.Z.; Hussain, F.; Pires, I.M. A portable smart fitness suite for real-time exercise monitoring and posture correction. Sensors 2021, 21, 6692. [Google Scholar] [CrossRef] [PubMed]
- Siddiq, M.; Wibawa, I.P.D.; Kallista, M. Integrated Internet of Things (IoT) technology device on smart home system with human posture recognition using kNN method. In Proceedings of the IOP Conference Series: Materials Science and Engineering, the 5th Annual Applied Science and Engineering Conference (AASEC 2020), Bandung, Indonesia, 20–21 April 2020; IOP Publishing: Bandung, Indonesia, 2020; Volume 1098, p. 42065. [Google Scholar]
- Zhang, M.; Chen, S.; Zhao, X.; Yang, Z. Research on construction workers’ activity recognition based on smartphone. Sensors 2018, 18, 2667. [Google Scholar] [CrossRef] [Green Version]
- Khoury, N.; Attal, F.; Amirat, Y.; Oukhellou, L.; Mohammed, S. Data-driven based approach to aid parkinson’s disease diagnosis. Sensors 2019, 19, 242. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Joo, H.; Lee, J.; Chee, Y. Automatic classification of squat posture using inertial sensors: Deep learning approach. Sensors 2020, 20, 361. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jeng, P.-Y.; Wang, L.-C.; Hu, C.-J.; Wu, D. A wrist sensor sleep posture monitoring system: An automatic labeling approach. Sensors 2021, 21, 258. [Google Scholar] [CrossRef]
- Mortensen, J.; Trkov, M.; Merryweather, A. Improved ergonomic risk factor assessment using opensim and inertial measurement units. In Proceedings of the 2018 IEEE/ACM International Conference on Connected Health: Applications, Systems and Engineering Technologies (CHASE), Washington, DC, USA, 26–28 September 2018. [Google Scholar]
- Echeverría, V.; Avendaño, A.; Chiluiza, K.; Vásquez, A.; Ochoa, X. Presentation Skills Estimation Based on Video and Kinect Data Analysis. In Proceedings of the 2014 ACM Workshop on Multimodal Learning Analytics Workshop and Grand Challenge, Istanbul, Turkey, 12–16 November 2014; ACM Press: New York, NY, USA, 2014; pp. 53–60. [Google Scholar]
- Kim, Y.M.; Son, Y.; Kim, W.; Jin, B.; Yun, M.H. Classification of children’s sitting postures using machine learning algorithms. Appl. Sci. 2018, 8, 1280. [Google Scholar] [CrossRef] [Green Version]
- Sandybekov, M.; Grabow, C.; Gaiduk, M.; Seepold, R. Posture tracking using a machine learning algorithm for a home aal environment. In Innovation in Medicine and Healthcare; Springer: Berlin/Heidelberg, Germany, 2019; pp. 337–347. [Google Scholar]
- Bourahmoune, K.; Amagasa, T. AI-Powered Posture Training: Application of Machine Learning in Sitting Posture Recognition Using the LifeChair Smart Cushion; IJCAI: Macao, China, 16 August 2019; pp. 5808–5814. [Google Scholar]
- Bejinariu, S.-I.; Costin, H.; Rotaru, F.; Luca, R.; Lazar, C. Deep learning based human locomotion recognition in video sequences. In Proceedings of the 2020 International Conference on e-Health and Bioengineering (EHB), Iasi, Romania, 29–30 October 2020; pp. 1–4. [Google Scholar]
- Liaqat, S.; Dashtipour, K.; Arshad, K.; Assaleh, K.; Ramzan, N. A hybrid posture detection framework: Integrating machine learning and deep neural networks. IEEE Sens. J. 2021, 21, 9515–9522. [Google Scholar] [CrossRef]
- Bonneau, M.; Benet, B.; Labrune, Y.; Bailly, J.; Ricard, E.; Canario, L. Predicting sow postures from video images: Comparison of convolutional neural networks and segmentation combined with support vector machines under various training and testing setups. Biosyst. Eng. 2021, 212, 19–29. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Volunteers = 8 | ||
|---|---|---|
| Attributes | Means +/− SD | Range |
| Age, year | 39.5 +/− 17.6 | 27–52 |
| Mass, kg | 71 +/− 9.8 | 64–78 |
| Height, m | 1.45 +/− 0.09 | 1.38–1.52 |
| Gender M/F | 5/3 | |
| IMU—Device Placement | Total Time Duration | Dataset (After Pre-Processing) |
|---|---|---|
| A sensor placed at the front side | 1080 s for nine static positions | 1080 × 5 time, acc(x,y,z), position |
| A sensor placed at the back side | 1080 s for nine static positions | 1080 × 5 time, acc (x,y,z), position |
| Condition | Sub 01 | Sub 02 | Sub 03 | Sub 04 | Sub 05 | Sub 06 | Sub 07 | Sub 08 |
|---|---|---|---|---|---|---|---|---|
| Any itching around the neck? | X | X | X | X | X | X | X | X |
| Is it comfortable to wear? | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Is it easy to adjust to your neck dimensions? | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Is there any trouble/pain/discomfort from wearing this Neckband? | X | X | X | X | X | X | X | X |
| Please give a rating for this Smart Neckband out of 5 | 4 | 4 | 3.5 | 4.5 | 5 | 3.5 | 5 | 4.5 |
| No. of Days | No. of Trails | Rehabilitation Assessment Based on Movements |
|---|---|---|
| 1 | 1 | Problem: Neck Up movement needs to improve |
| 2 | Problem: Neck Up movement needs to improve | |
| 2 | 1 | Problem: Neck Up movement needs to improve |
| 2 | Problem: Neck Up movement needs to improve | |
| 3 | 1 | Problem: Neck Up movement— slightly improved compared to previous day |
| 2 | Problem: Neck Up movement—same as the previous trial | |
| 4 | 1 | Problem: Neck Up and Neck Down movements— needs to improve |
| 2 | Problem: Neck Up movement needs to improve | |
| 5 | 1 | Problem: Neck Up movement. Slightly improved |
| 2 | Problem: Neck Up movement. Good Improvement | |
| 6 | 1 | Good Improvement |
| 2 | Good Improvement | |
| 7 | 1 | Good Improvement |
| 2 | Good Improvement | |
| 8 | 1 | Good Improvement |
| 2 | Good Improvement | |
| 9 | 1 | Improved |
| 2 | Improved | |
| 10 | 1 | Improved |
| 2 | Improved |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, K.V.R.; Elias, S. Real-Time Tracking of Human Neck Postures and Movements. Healthcare 2021, 9, 1755. https://doi.org/10.3390/healthcare9121755
Kumar KVR, Elias S. Real-Time Tracking of Human Neck Postures and Movements. Healthcare. 2021; 9(12):1755. https://doi.org/10.3390/healthcare9121755
Chicago/Turabian StyleKumar, Korupalli V. Rajesh, and Susan Elias. 2021. "Real-Time Tracking of Human Neck Postures and Movements" Healthcare 9, no. 12: 1755. https://doi.org/10.3390/healthcare9121755
APA StyleKumar, K. V. R., & Elias, S. (2021). Real-Time Tracking of Human Neck Postures and Movements. Healthcare, 9(12), 1755. https://doi.org/10.3390/healthcare9121755