The Effects of Motion Artifacts on Self-Avatar Agency




Abstract
:
1. Introduction
- Noise: A wave or vibration artifact that is produced by the hardware during the motion capture process. Many motion capture systems (both optical and inertial) produce this artifact, and in most cases smoothing algorithms are used to eliminate them.
- Latency: The delay of the motion data to be transmitted and rendered into the computer screen or HMD. All motion capture systems have latency but, in most cases, it is within the acceptance spectrum.
- Motion jump: The inability of the motion capture sensor/system to estimate fast movements. This also occurs with body-occlusion. This can be found in optical motion capture systems when they cannot capture the retro-reflective markers attached to a participant’s body-parts, or in low-cost RGB-D sensors due to the low frame rate.
- Offset rotation of joint: The inability of the motion capture device/system to properly estimate the rotation of the user’s body-parts. This can also be caused by inaccuracies in the calibration of the motion capture system.
- RQ1: Do motion artifacts affect the sense of self-agency?
- RQ2: Do the observation tasks affect the sense of self-agency?
2. Related Work
- body ownership [7] (present in case there is a virtual body or body part that represents the user’s body or body part);
- agency and motor control of the virtual body [8] (the participant should be able to control parts or the whole body of the virtual avatar);
- tactile sensations [9] (enhance embodiment illusion by using tactile or haptic stimulation devices);
- location [10] (a virtual body or body part might be either collocated or not);
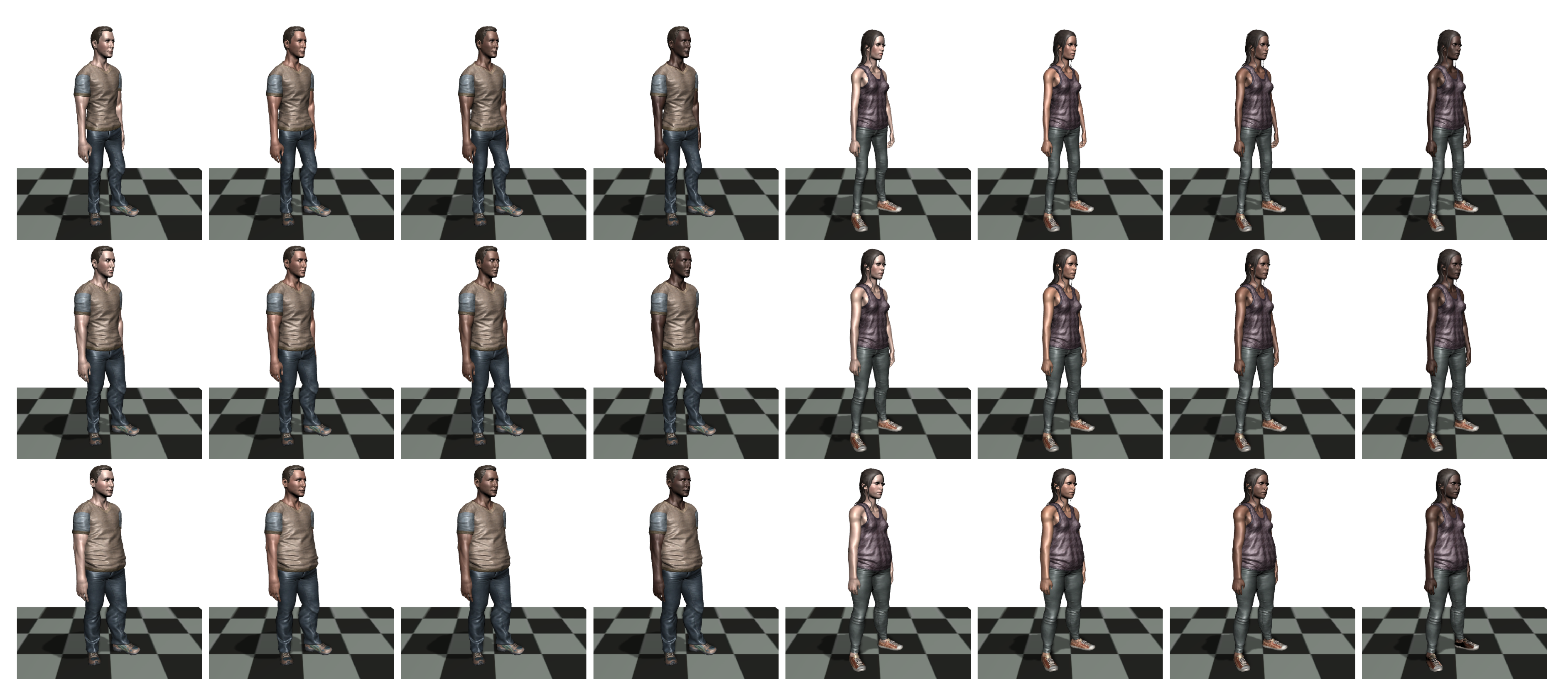
- appearance [11] (the self-avatar might be a lookalike avatar, or not, in terms of size, gender, race, clothing, etc.); and
- response to external stimuli [12] (events that modify or threaten the appearance of the self-avatar).
3. Methodology and Implementation
3.1. Participants
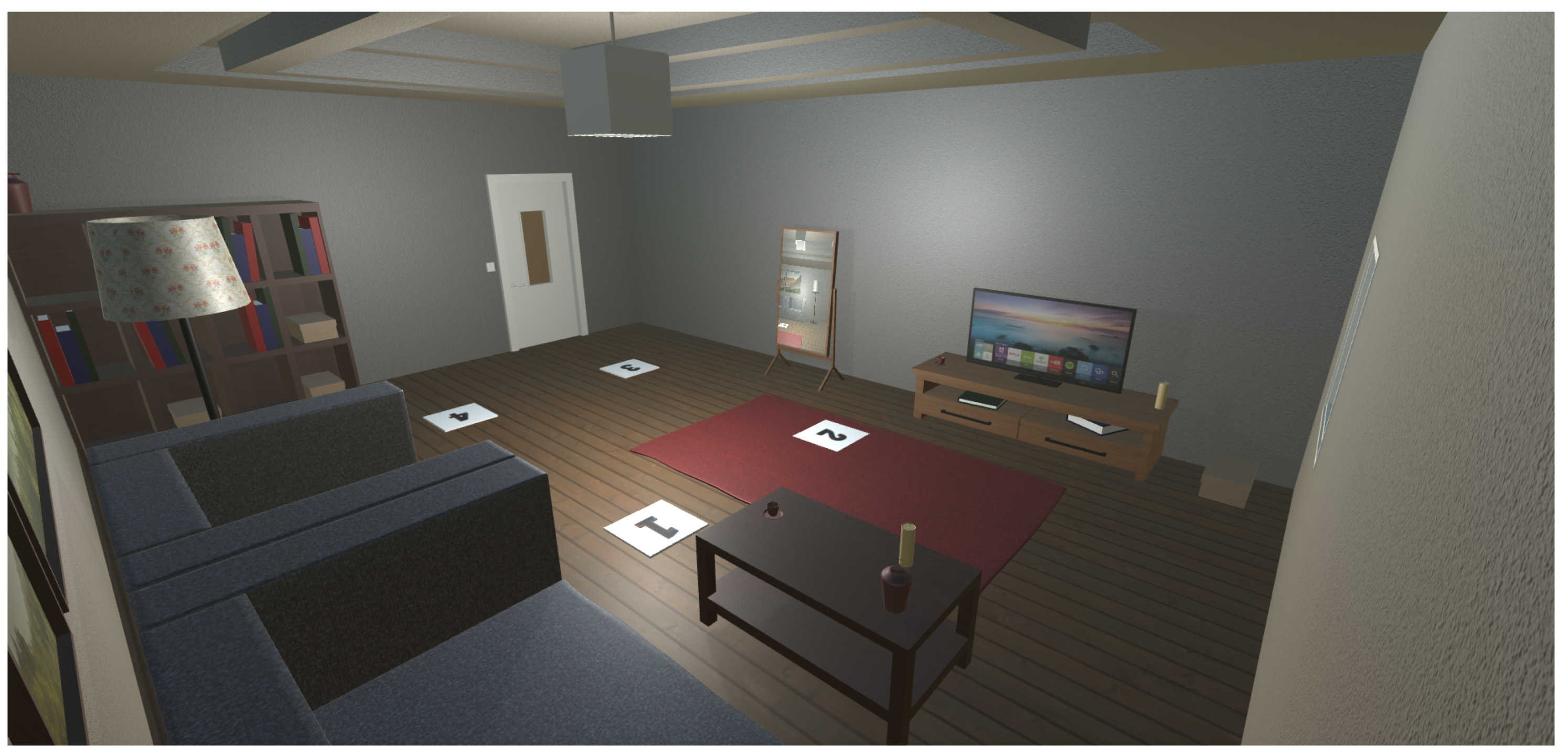
3.2. Physical Environment
3.3. Virtual Reality Application and Equipment
3.4. Motion Artifacts
3.5. Experiment Procedure
3.6. Questionnaire
4. Results
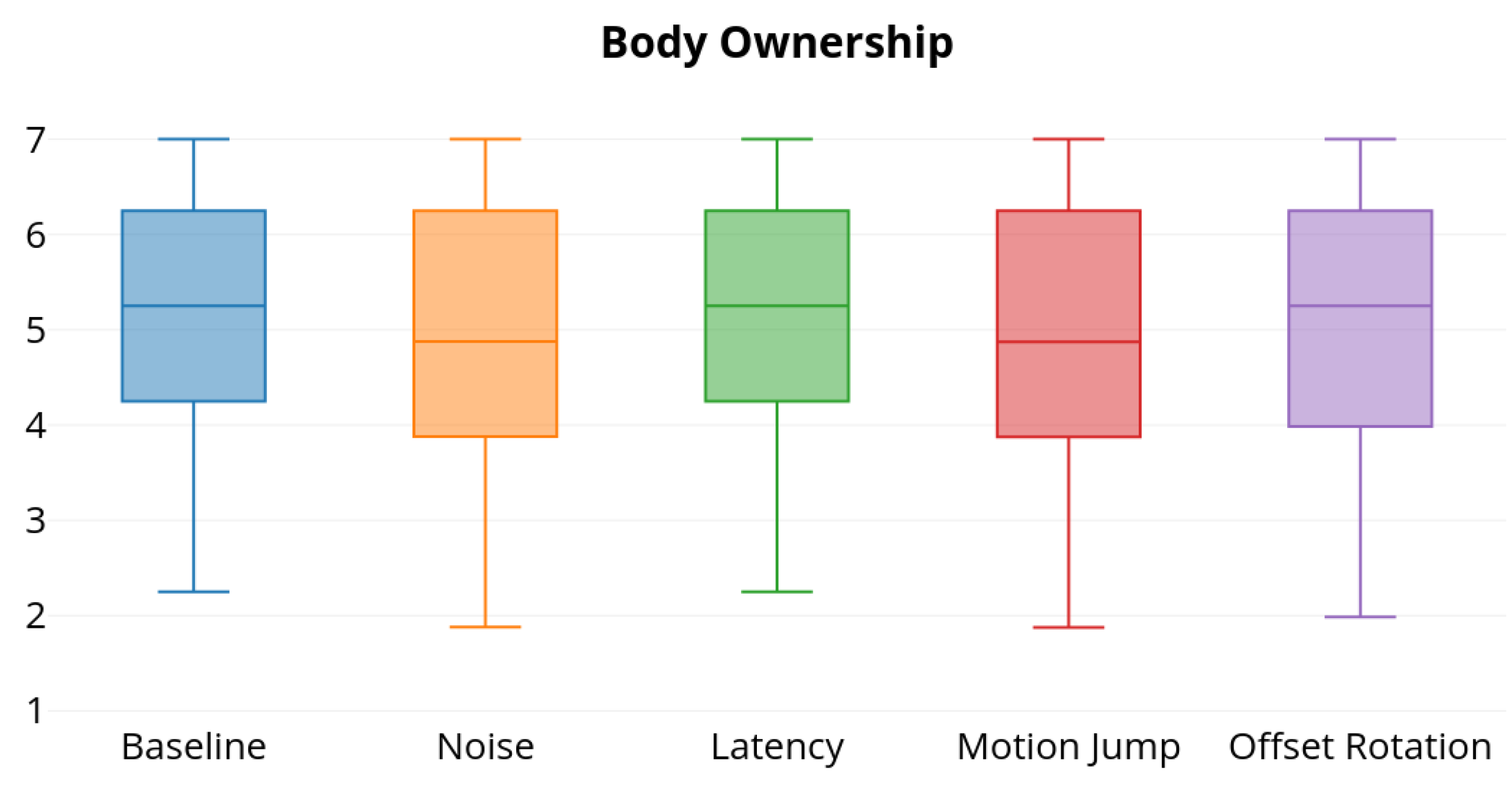
4.1. Body Ownership
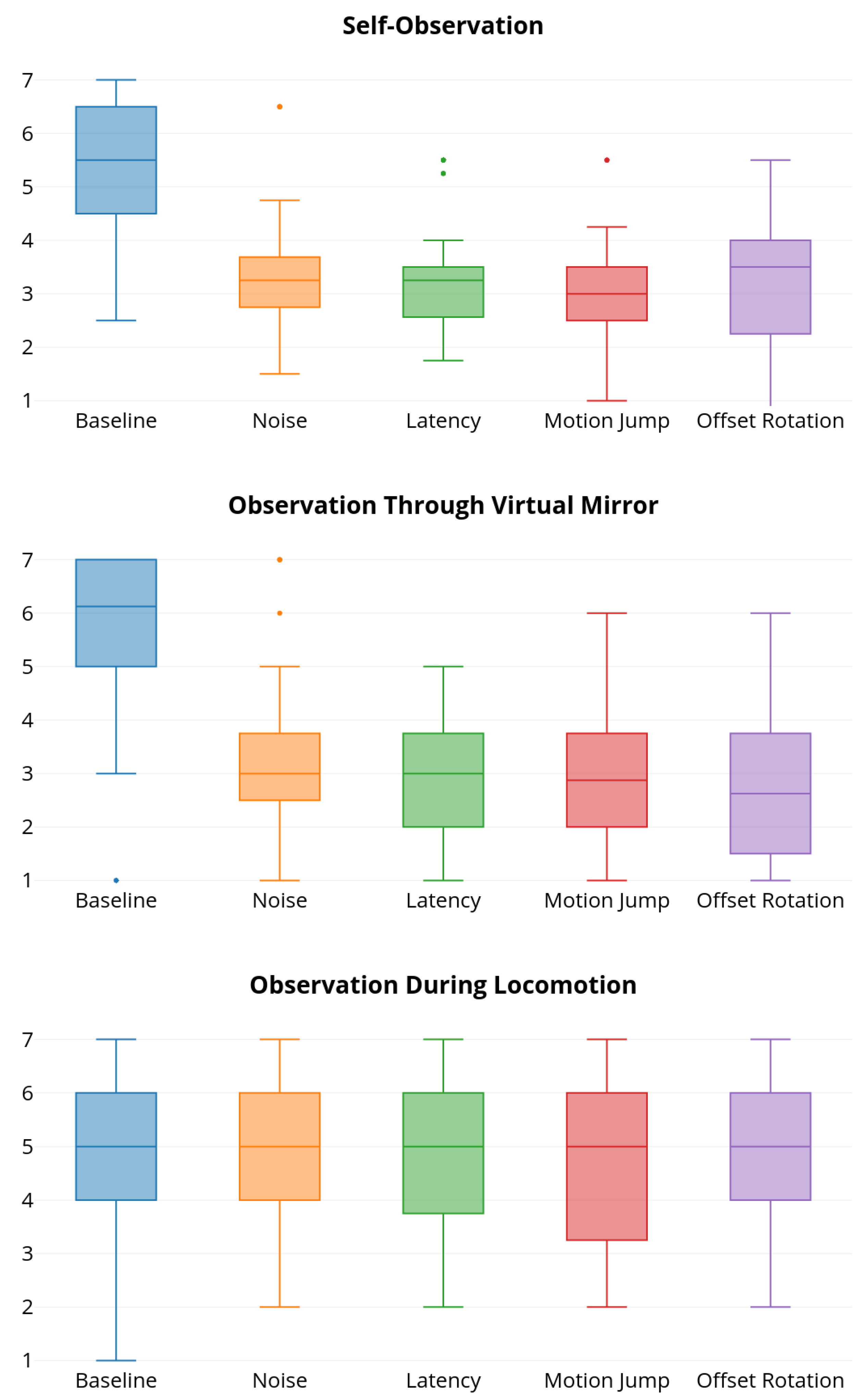
4.2. Self-Agency
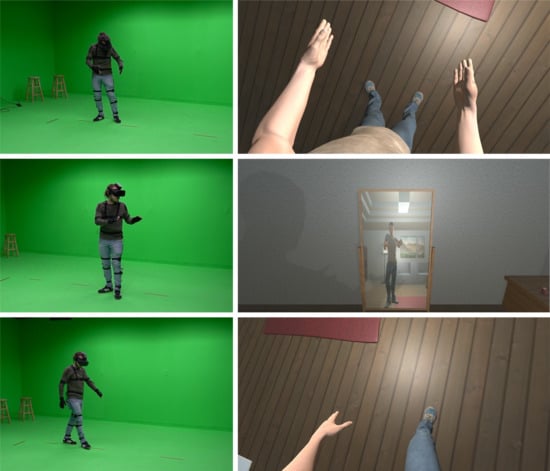
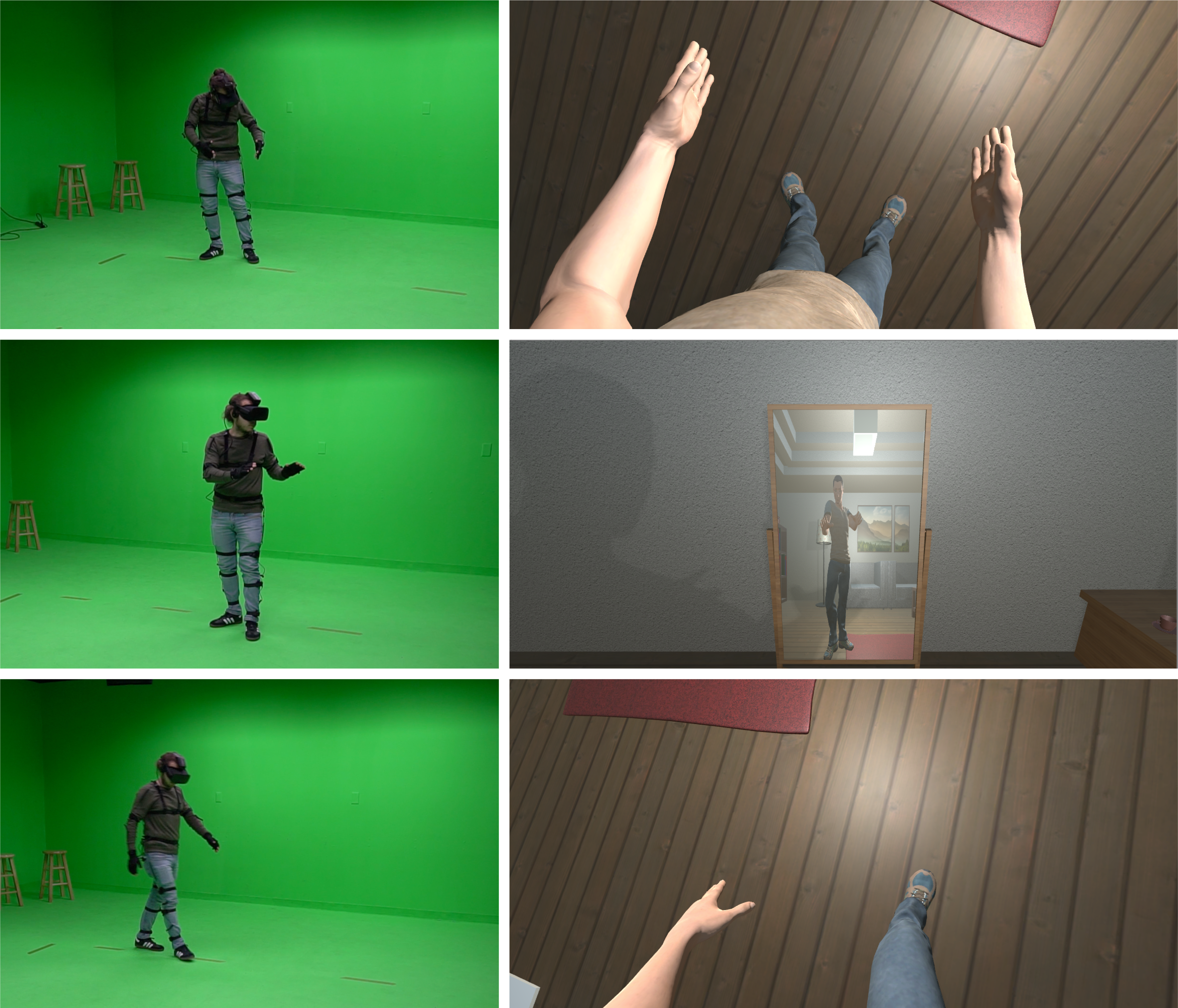
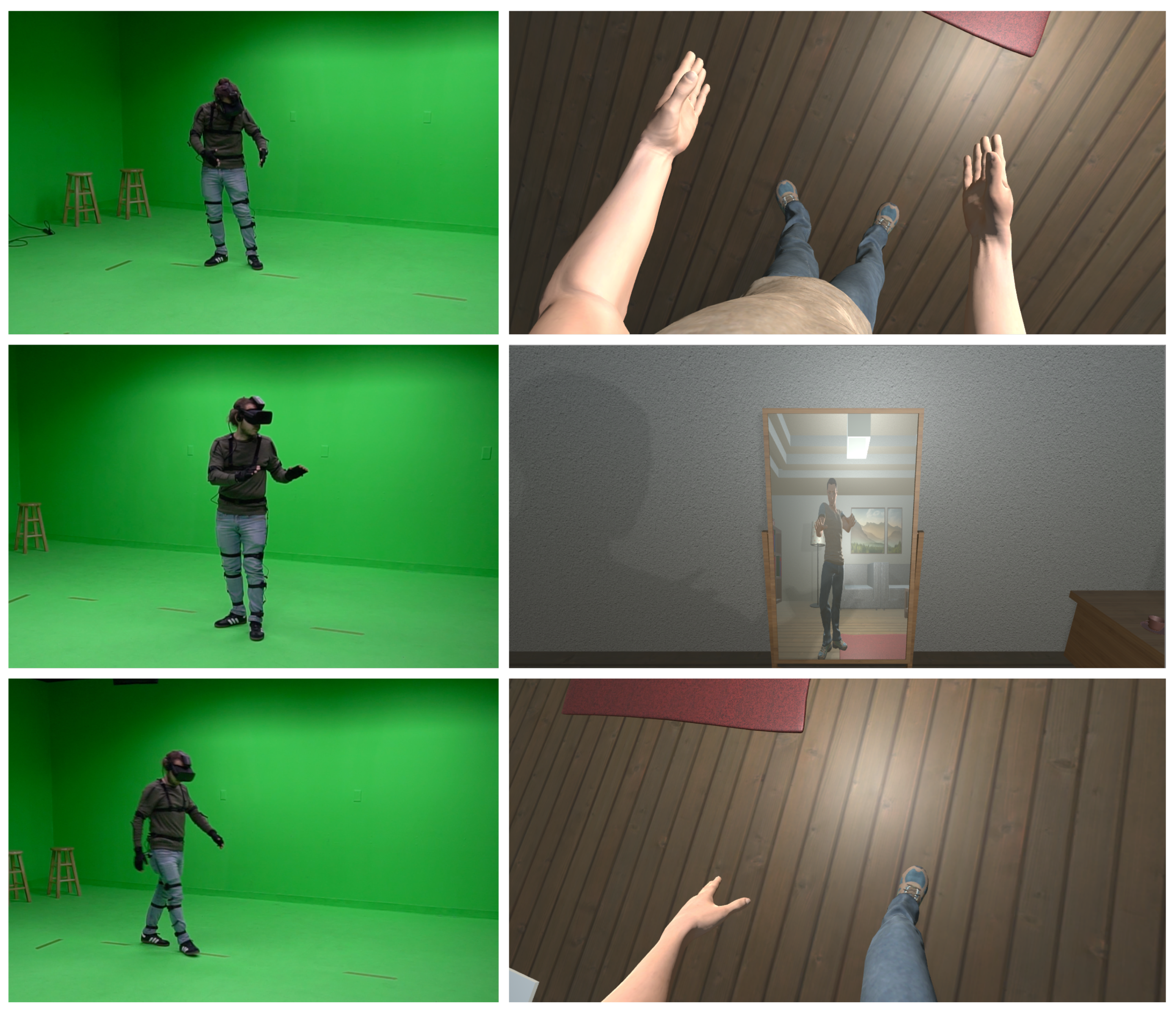
4.2.1. Task 1: Self-Observation
4.2.2. Task 2: Observation through Virtual Mirror
4.2.3. Task 3: Observation during Locomotion
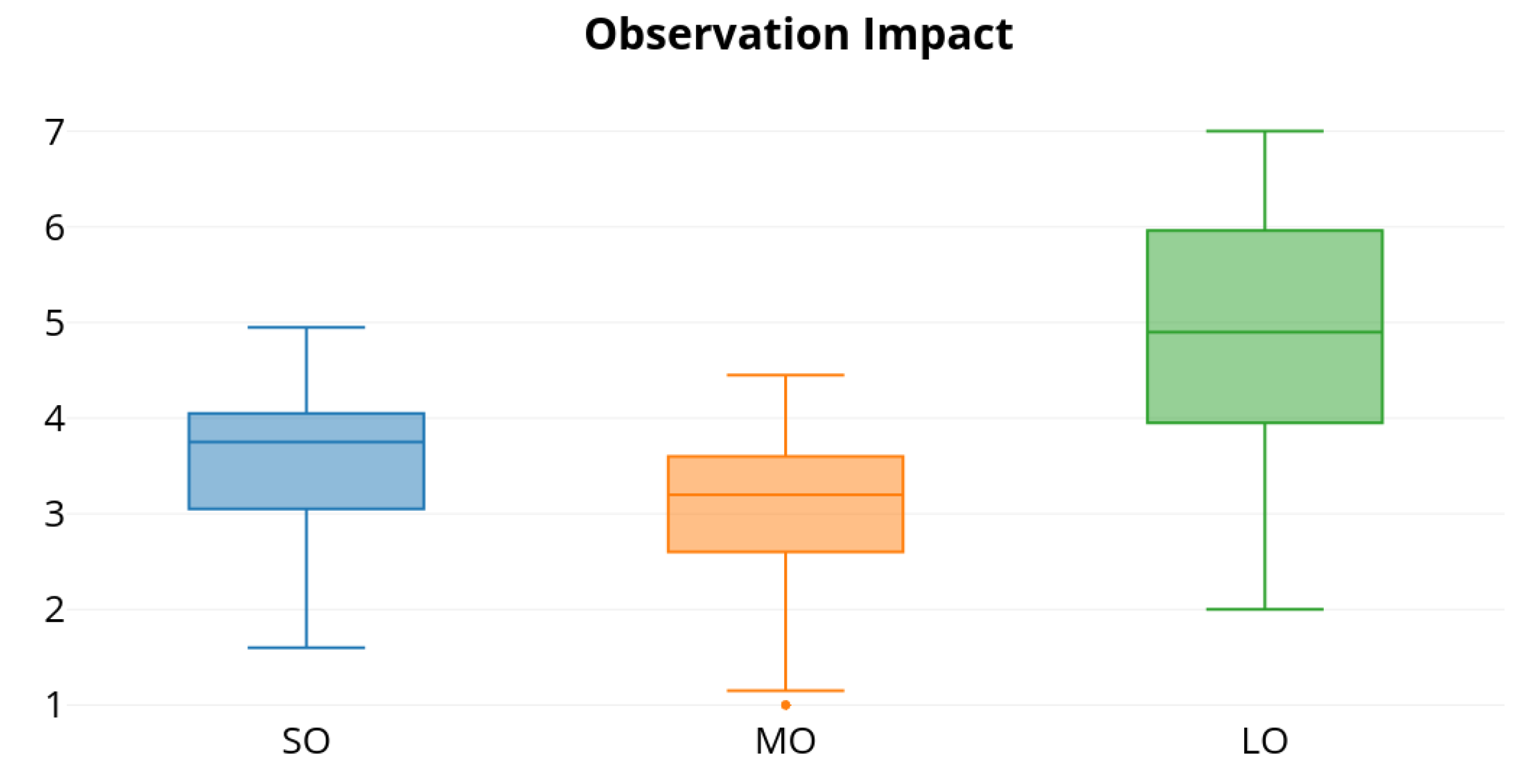
4.3. Observation Impact
5. Discussion
6. Conclusions and Future Work
Author Contributions
Conflicts of Interest
References
- Dodds, T.J.; Mohler, B.J.; Bülthoff, H.H. Talk to the virtual hands: Self-animated avatars improve communication in head-mounted display virtual environments. PLoS ONE 2011, 6, e25759. [Google Scholar] [CrossRef] [PubMed]
- England, D. Whole Body Interaction; Springer: London, UK, 2011. [Google Scholar]
- Usoh, M.; Arthur, K.; Whitton, M.C.; Bastos, R.; Steed, A.; Slater, M.; Brooks, F.P., Jr. Walking> walking-in-place> flying, in virtual environments. In Proceedings of the 26th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 8–13 August 1999; pp. 359–364. [Google Scholar]
- Cirio, G.; Olivier, A.H.; Marchal, M.; Pettre, J. Kinematic evaluation of virtual walking trajectories. IEEE Trans. Vis. Comput. Graph. 2013, 19, 671–680. [Google Scholar] [CrossRef]
- Kilteni, K.; Groten, R.; Slater, M. The sense of embodiment in virtual reality. Presence Teleoperators Virtual Environ. 2012, 21, 373–387. [Google Scholar] [CrossRef]
- Gonzalez-Franco, M.G.F.; Peck, T.C. Avatar Embodiment. Towards a Standardized Questionnaire. Front. Robot. AI 2018, 5, 74. [Google Scholar] [CrossRef]
- Lopez, C.; Halje, P.; Blanke, O. Body ownership and embodiment: Vestibular and multisensory mechanisms. Clin. Neurophysiol. 2008, 38, 149–161. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Newport, R.; Pearce, R.; Preston, C. Fake hands in action: Embodiment and control of supernumerary limbs. Exp. Brain Res. 2010, 204, 385–395. [Google Scholar] [CrossRef] [PubMed]
- Kokkinara, E.; Slater, M. Measuring the effects through time of the influence of visuomotor and visuotactile synchronous stimulation on a virtual body ownership illusion. Perception 2014, 43, 43–58. [Google Scholar] [CrossRef] [PubMed]
- Arzy, S.; Thut, G.; Mohr, C.; Michel, C.M.; Blanke, O. Neural basis of embodiment: Distinct contributions of temporoparietal junction and extrastriate body area. J. Neurosci. 2006, 26, 8074–8081. [Google Scholar] [CrossRef] [PubMed]
- Spanlang, B.; Normand, J.M.; Borland, D.; Kilteni, K.; Giannopoulos, E.; Pomés, A.; González-Franco, M.; Perez-Marcos, D.; Arroyo-Palacios, J.; Muncunill, X.N.; et al. How to build an embodiment lab: Achieving body representation illusions in virtual reality. Front. Robot. AI 2014, 1, 9. [Google Scholar] [CrossRef]
- González-Franco, M.; Peck, T.C.; Rodríguez-Fornells, A.; Slater, M. A threat to a virtual hand elicits motor cortex activation. Exp. Brain Res. 2014, 232, 875–887. [Google Scholar] [CrossRef]
- Blanke, O.; Metzinger, T. Full-body illusions and minimal phenomenal selfhood. Trends Cognit. Sci. 2009, 13, 7–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tsakiris, M.; Prabhu, G.; Haggard, P. Having a body versus moving your body: How agency structures body-ownership. Conscious. Cognit. 2006, 15, 423–432. [Google Scholar] [CrossRef]
- David, N.; Newen, A.; Vogeley, K. The “sense of agency” and its underlying cognitive and neural mechanisms. Conscious. Cognit. 2008, 17, 523–534. [Google Scholar] [CrossRef] [PubMed]
- Blakemore, S.J.; Wolpert, D.M.; Frith, C.D. Abnormalities in the awareness of action. Trends Cognit. Sci. 2002, 6, 237–242. [Google Scholar] [CrossRef]
- Franck, N.; Farrer, C.; Georgieff, N.; Marie-Cardine, M.; Daléry, J.; d’Amato, T.; Jeannerod, M. Defective recognition of one’s own actions in patients with schizophrenia. Am. J. Psychiatry 2001, 158, 454–459. [Google Scholar] [CrossRef] [PubMed]
- Sato, A.; Yasuda, A. Illusion of sense of self-agency: Discrepancy between the predicted and actual sensory consequences of actions modulates the sense of self-agency, but not the sense of self-ownership. Cognition 2005, 94, 241–255. [Google Scholar] [CrossRef] [PubMed]
- Perez-Marcos, D.; Solazzi, M.; Steptoe, W.; Oyekoya, W.; Frisoli, A.; Weyrich, T.; Steed, A.; Tecchia, F.; Slater, M.; Sanchez-Vives, M.V. A fully immersive set-up for remote interaction and neurorehabilitation based on virtual body ownership. Front. Neurol. 2012, 3, 110. [Google Scholar] [CrossRef]
- Wuang, Y.P.; Chiang, C.S.; Su, C.Y.; Wang, C.C. Effectiveness of virtual reality using Wii gaming technology in children with Down syndrome. Res. Dev. Disabil. 2011, 32, 312–321. [Google Scholar] [CrossRef]
- Tsakiris, M.; Schütz-Bosbach, S.; Gallagher, S. On agency and body-ownership: Phenomenological and neurocognitive reflections. Conscious. Cognit. 2007, 16, 645–660. [Google Scholar] [CrossRef]
- Argelaguet, F.; Hoyet, L.; Trico, M.; Lécuyer, A. The role of interaction in virtual embodiment: Effects of the virtual hand representation. In Proceedings of the 2016 IEEE Virtual Reality (VR), Greenville, SC, USA, 19–23 March 2016; pp. 3–10. [Google Scholar]
- Dummer, T.; Picot-Annand, A.; Neal, T.; Moore, C. Movement and the rubber hand illusion. Perception 2009, 38, 271–280. [Google Scholar] [CrossRef]
- Sanchez-Vives, M.V.; Spanlang, B.; Frisoli, A.; Bergamasco, M.; Slater, M. Virtual hand illusion induced by visuomotor correlations. PLoS ONE 2010, 5, e10381. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Y.; Steed, A. Is the rubber hand illusion induced by immersive virtual reality? In Proceedings of the 2010 IEEE Virtual Reality Conference (VR), Waltham, MA, USA, 20–24 March 2010; pp. 95–102. [Google Scholar]
- Kalckert, A.; Ehrsson, H.H. Moving a rubber hand that feels like your own: A dissociation of ownership and agency. Front. Hum. Neurosci. 2012, 6, 40. [Google Scholar] [CrossRef] [PubMed]
- Longo, M.R.; Schüür, F.; Kammers, M.P.; Tsakiris, M.; Haggard, P. What is embodiment? A psychometric approach. Cognition 2008, 107, 978–998. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Molla, E.; Debarba, H.G.; Boulic, R. Egocentric mapping of body surface constraints. IEEE Trans. Vis. Comput. Graph. 2018, 24, 2089–2102. [Google Scholar] [PubMed]
- Raunhardt, D.; Boulic, R. Immersive singularity-free full-body interactions with reduced marker set. Comput. Animat. Virtual Worlds 2011, 22, 407–419. [Google Scholar] [CrossRef]
- Mousas, C. Full-body locomotion reconstruction of virtual characters using a single inertial measurement unit. Sensors 2017, 17, 2589. [Google Scholar] [CrossRef] [PubMed]
- Chai, J.; Hodgins, J.K. Performance animation from low-dimensional control signals. ACM Trans. Graph. (ToG) 2005, 24, 686–696. [Google Scholar] [CrossRef]
- Mousas, C.; Anagnostopoulos, C.N. Performance-driven hybrid full-body character control for navigation and interaction in virtual environments. 3D Res. 2017, 8, 18. [Google Scholar] [CrossRef]
- Van Den Bos, E.; Jeannerod, M. Sense of body and sense of action both contribute to self-recognition. Cognition 2002, 85, 177–187. [Google Scholar] [CrossRef]
- Gonzalez-Franco, M.; Perez-Marcos, D.; Spanlang, B.; Slater, M. The contribution of real-time mirror reflections of motor actions on virtual body ownership in an immersive virtual environment. In Proceedings of the 2010 IEEE Virtual Reality Conference (VR), Waltham, MA, USA, 20–24 March 2010; pp. 111–114. [Google Scholar]
- Kannape, O.; Schwabe, L.; Tadi, T.; Blanke, O. The limits of agency in walking humans. Neuropsychologia 2010, 48, 1628–1636. [Google Scholar] [CrossRef] [Green Version]
- Filippeschi, A.; Schmitz, N.; Miezal, M.; Bleser, G.; Ruffaldi, E.; Stricker, D. Survey of motion tracking methods based on inertial sensors: A focus on upper limb human motion. Sensors 2017, 17, 1257. [Google Scholar] [CrossRef]
- Banakou, D.; Hanumanthu, P.D.; Slater, M. Virtual embodiment of white people in a black virtual body leads to a sustained reduction in their implicit racial bias. Front. Hum. Neurosci. 2016, 10, 601. [Google Scholar] [CrossRef]
- Tajadura-Jiménez, A.; Banakou, D.; Bianchi-Berthouze, N.; Slater, M. Embodiment in a child-like talking virtual body influences object size perception, self-identification, and subsequent real speaking. Sci. Rep. 2017, 7, 9637. [Google Scholar] [CrossRef]
- Steed, A.; Frlston, S.; Lopez, M.M.; Drummond, J.; Pan, Y.; Swapp, D. An ‘in the wild’ experiment on presence and embodiment using consumer virtual reality equipment. IEEE Trans. Vis. Comput. Graph. 2016, 22, 1406–1414. [Google Scholar] [CrossRef]
- Banakou, D.; Slater, M. Body ownership causes illusory self-attribution of speaking and influences subsequent real speaking. Proc. Natl. Acad. Sci. USA 2014, 111, 17678–17683. [Google Scholar] [CrossRef] [Green Version]
- Latoschik, M.E.; Roth, D.; Gall, D.; Achenbach, J.; Waltemate, T.; Botsch, M. The effect of avatar realism in immersive social virtual realities. In Proceedings of the 23rd ACM Symposium on Virtual Reality Software and Technology, Gothenburg, Sweden, 8–10 November 2017; p. 39. [Google Scholar]
- Slater, M. Place illusion and plausibility can lead to realistic behaviour in immersive virtual environments. Philos. Trans. R. Soc. Lond. B Biol. Sci. 2009, 364, 3549–3557. [Google Scholar] [CrossRef] [Green Version]
- Slater, M.; Wilbur, S. A framework for immersive virtual environments (FIVE): Speculations on the role of presence in virtual environments. Presence Teleoperators Virtual Environ. 1997, 6, 603–616. [Google Scholar] [CrossRef]
- Perlin, K. Improving noise. ACM Trans. Graph. (TOG) 2002, 21, 681–682. [Google Scholar] [CrossRef]
- Waltemate, T.; Senna, I.; Hülsmann, F.; Rohde, M.; Kopp, S.; Ernst, M.; Botsch, M. The impact of latency on perceptual judgments and motor performance in closed-loop interaction in virtual reality. In Proceedings of the 22nd ACM Conference on Virtual Reality Software and Technology, Munich, Germany, 2–4 November 2016; pp. 27–35. [Google Scholar]
- Botvinick, M.; Cohen, J. Rubber hands ‘feel’ touch that eyes see. Nature 1998, 391, 756. [Google Scholar] [CrossRef]
- Slater, M.; Pérez Marcos, D.; Ehrsson, H.; Sanchez-Vives, M.V. Towards a digital body: The virtual arm illusion. Front. Hum. Neurosci. 2008, 2, 6. [Google Scholar] [CrossRef]
- Nie, N.H.; Bent, D.H.; Hull, C.H. SPSS: Statistical Package for the Social Sciences; McGraw-Hill Book Co.: New York, NY, USA, 1975. [Google Scholar]
- Steed, A.; Pan, Y.; Zisch, F.; Steptoe, W. The impact of a self-avatar on cognitive load in immersive virtual reality. In Proceedings of the 2016 IEEE Virtual Reality Conference (VR), Greenville, SC, USA, 19–23 March 2016; Volume 23, pp. 67–76. [Google Scholar]
- Gibson, J.J. Adaptation, after-effect and contrast in the perception of curved lines. J. Exp. Psychol. 1933, 16, 1. [Google Scholar] [CrossRef]
- Caspar, E.A.; Cleeremans, A.; Haggard, P. The relationship between human agency and embodiment. Conscious. Cognit. 2015, 33, 226–236. [Google Scholar] [CrossRef]
- Krogmeier, C.; Mousas, C.; Whittinghill, D. Human-Virtual Character Interaction: Towards Understanding the Influence of Haptic Feedback. Comput. Anim. Virtual Worlds 2019, 30, 3–4. [Google Scholar]
- Krogmeier, C.; Mousas, C.; Whittinghill, D. Human, Virtual Human, Bump! A Preliminary Study on Haptic Feedback. In Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces, Osaka, Japan, 23–27 March 2019. [Google Scholar]
- Zibrek, K.; Kokkinara, E.; McDonnell, R. The Effect of Realistic Appearance of Virtual Characters in Immersive Environments-Does the Character’s Personality Play a Role? IEEE Trans. Vis. Comput. Graph. 2018, 24, 1681–1690. [Google Scholar] [CrossRef]
- Mousas, C.; Anastasiou, D.; Spantidi, O. The effects of appearance and motion of virtual characters on emotional reactivity. Comput. Hum. Behav. 2018, 86, 99–108. [Google Scholar] [CrossRef]
- Mousas, C.; Koilias, A.; Anastasiou, D.; Rekabdar, B.; Anagnostopoulos, C.N. Effects of Self-Avatar and Gaze on Avoidance Movement Behavior. In Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces, Osaka, Japan, 23–27 March 2019. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Light | Medium | Brown | Black | |||||
|---|---|---|---|---|---|---|---|---|
| Skinny | M: 1 | F: 3 | M: 9 | F: 6 | M: 1 | F: 2 | M: 0 | F: 0 |
| Regular | M: 4 | F: 5 | M: 17 | F: 12 | M: 1 | F: 2 | M: 0 | F: 0 |
| Fat | M: 2 | F: 2 | M: 5 | F: 2 | M: 2 | F: 0 | M: 1 | F: 0 |
| Label | Question | Options |
|---|---|---|
| Q1 | How strong was the feeling that the body you saw was your own? | 1 being not at all, 7 being very much |
| Q2 | How much did you feel that you were looking at your own body? | 1 being not at all, 7 being very much |
| Q3 | How strong was the feeling that your real body was becoming virtual? | 1 being not at all, 7 being very much |
| Q4 | How strong was the feeling that the virtual body was beginning to look like your real body? | 1 being not at all, 7 being very much |
| Q5 | How strong was the feeling that you could control the virtual body as if it was your own body? | 1 being not at all, 7 being very much |
| Q6 | How strong was the feeling that the movements of the virtual body were caused by your movements? | 1 being not at all, 7 being very much |
| Q7 | How strong was the feeling that your virtual body moved just like you wanted it to? | 1 being not at all, 7 being very much |
| Q8 | How strong was the feeling that you were causing the movement of the virtual body you saw? | 1 being not at all, 7 being very much |
| Baseline | Noise | Latency | Motion Jumps | Offset Rotation | |
|---|---|---|---|---|---|
| Ownership: Self-observation | 0.893 | 0.879 | 0.797 | 0.858 | 0.841 |
| Agency: Self-observation | 0.792 | 0.819 | 0.723 | 0.708 | 0.830 |
| Agency: Observation through mirror | 0.903 | 0.829 | 0.716 | 0.797 | 0.762 |
| Agency: Observation during locomotion | 0.870 | 0.827 | 0.878 | 0.850 | 0.866 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koilias, A.; Mousas, C.; Anagnostopoulos, C.-N. The Effects of Motion Artifacts on Self-Avatar Agency. Informatics 2019, 6, 18. https://doi.org/10.3390/informatics6020018
Koilias A, Mousas C, Anagnostopoulos C-N. The Effects of Motion Artifacts on Self-Avatar Agency. Informatics. 2019; 6(2):18. https://doi.org/10.3390/informatics6020018
Chicago/Turabian StyleKoilias, Alexandros, Christos Mousas, and Christos-Nikolaos Anagnostopoulos. 2019. "The Effects of Motion Artifacts on Self-Avatar Agency" Informatics 6, no. 2: 18. https://doi.org/10.3390/informatics6020018
APA StyleKoilias, A., Mousas, C., & Anagnostopoulos, C. -N. (2019). The Effects of Motion Artifacts on Self-Avatar Agency. Informatics, 6(2), 18. https://doi.org/10.3390/informatics6020018