
Simulation of Fracture Morphology during Sequential Fracturing

Abstract
:1. Introduction
2. Numerical Model
2.1. Model Assumption
2.2. Discontinuous Displacement Method
2.3. Deformation of Hydraulic Fracture
2.4. The Initiation and Propagation of Fracture
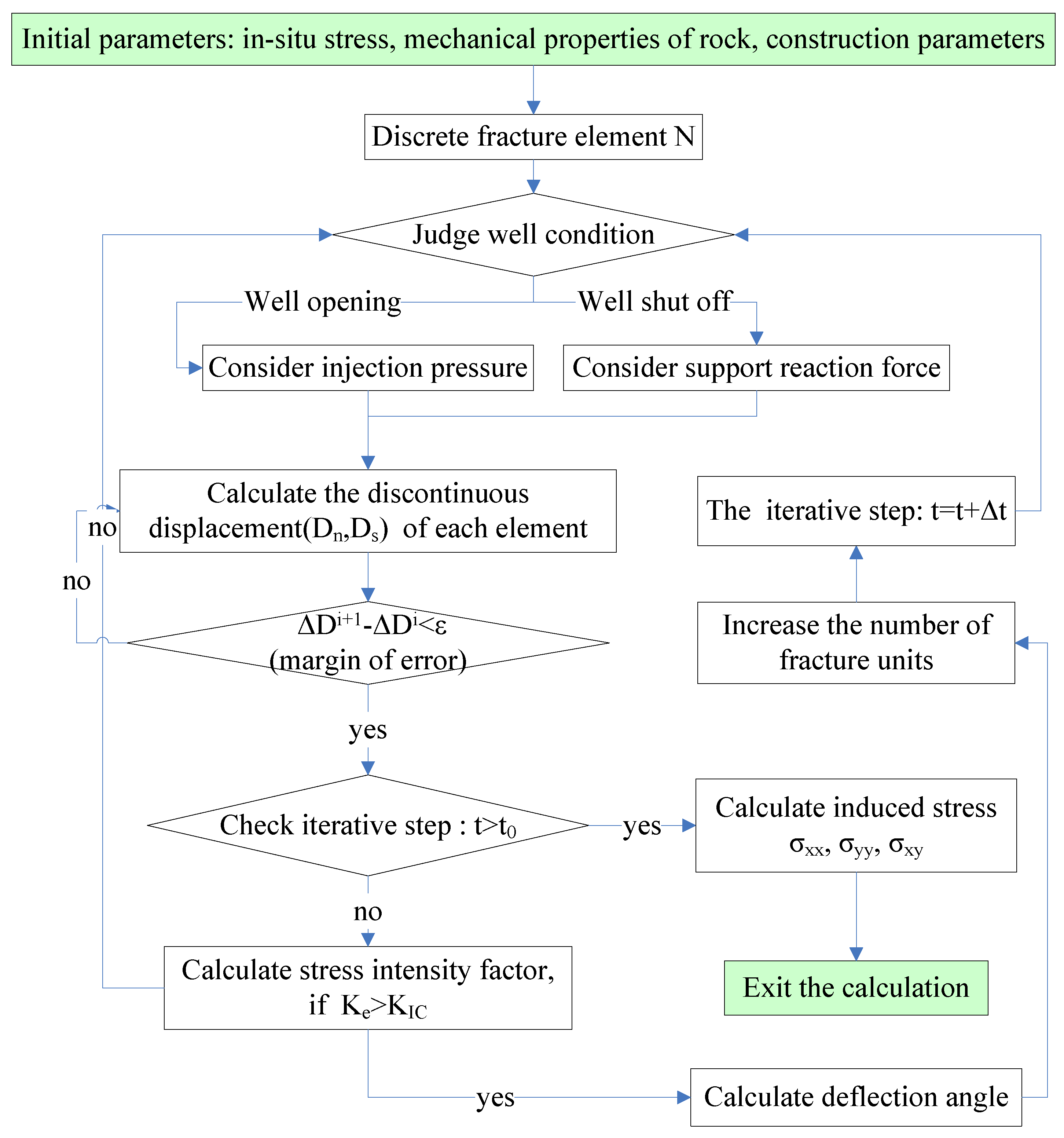
2.5. Flowchart
2.6. Model Validation
3. Results and Discussion
3.1. Deformation of Hydraulic Fracture and Induced Stress in a Single Well
3.2. Sensitivity Analysis
3.3. Deformation of HF and Distribution of Induced Stress under Zipper Fracturing
4. Conclusions
- (1)
- As large quantities of proppant are injected into hydraulic fracture during hydraulic fracturing, fractures will not completely close after the fracturing operation is completed. This residual aperture caused by proppant may produce induced stress and change the distribution of in-situ stress. Induced stress by residual aperture gradually decreases with the increase of vertical distance from the fracture plane and the decrease of residual aperture of fracture.
- (2)
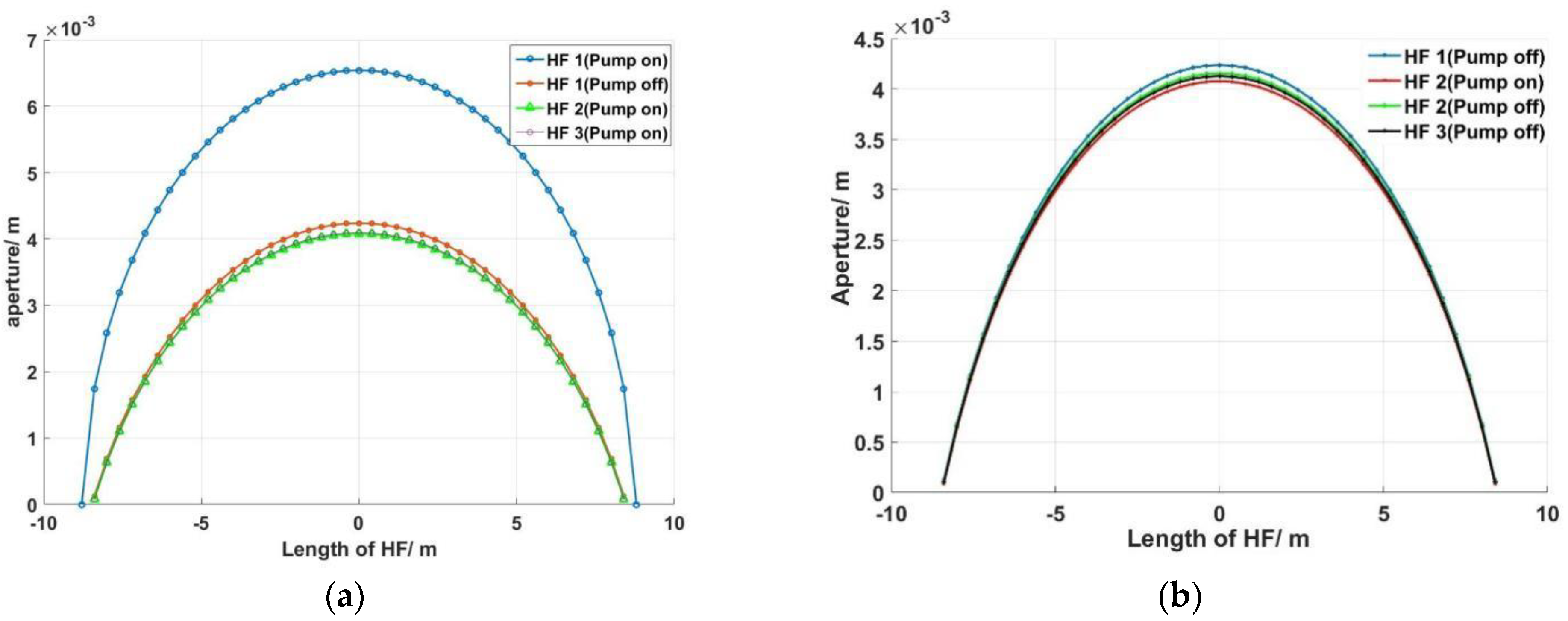
- The residual aperture will also influence the propagation and maximum aperture of subsequent fracture. When the fracture spacing in sequence fracturing is closer, the residual aperture will inhibit the opening degree of the subsequent fracture, which in turn affects the injection volume of the proppant. During sequence fracturing, fractures tend to exclusion and turn away in staged fracturing, on the contrary, which tends to approach and intersect in zipper fracturing.
- (3)
- Subsequent fracturing in turn compresses the previously cracked fracture, resulting in a further reduction in residual aperture, and after the fracture construction is completed, the previously pressurized fracture aperture is rebound. As the number of hydraulic fracture increases, the residual aperture of the previously pressed fracture gradually decreases. However, the fluctuation of fracture aperture mentioned above is small and less than 0.2 mm.
- (4)
- Sensitivity analysis shows that, in staged fracturing, the smaller the fracturing spacing, the more likely subsequent fractures are to be deflected, while in zipper fracturing, the effect of fracture spacing is not obvious. Well spacing can obviously influence the deflection of subsequent fracture in zipper fracture. With the increase of stiffness, the residual aperture of the hydraulic fracture increases, and the subsequent fractures are more likely to be deflected.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- British Patroleum. Statistical Review of World Energy; BP: London, UK, 2021. [Google Scholar]
- Khormali, A.; Petrakov, D.G.; Lamidi, A.-L.B. Prevention of Calcium Carbonate Precipitation during Water Injection into High-Pressure High-Temperature Wells. In Proceedings of the SPE European Formation Damage Conference and Exhibition, Budapest, Hugary, 3–5 June 2015. [Google Scholar]
- Khormali, A.; Bahlakeh, G.; Struchkov, I.; Kazemzadeh, Y. Increasing inhibition performance of simultaneous precipitation of calcium and strontium sulfate scales using a new inhibitor—Laboratory and field application. J. Pet. Sci. Eng. 2021, 202, 108589. [Google Scholar] [CrossRef]
- Khormali, A.; Sharifov, A.R.; Torba, D.I. Experimental and modeling analysis of asphaltene precipitation in the near wellbore region of oil wells. Pet. Sci. Technol. 2018, 36, 1030–1036. [Google Scholar] [CrossRef]
- Wang, Y.; Ju, Y.; Zhang, H.; Gong, S.; Song, J.; Li, Y.; Chen, J. Adaptive Finite Element-Discrete Element Analysis for the Stress Shadow Effects and Fracture Interaction Behaviours in Three-Dimensional Multistage Hydrofracturing Considering Varying Perforation Cluster Spaces and Fracturing Scenarios of Horizontal Wells. Rock Mech. Rock Eng. 2021, 54, 1815–1839. [Google Scholar] [CrossRef]
- Zhou, D.; Zheng, P.; Yang, J.; Li, M.; Xia, Y.; Cai, W.; Ma, X.; Liu, S. Optimizing the construction parameters of modified zipper fracs in multiple horizontal wells. J. Nat. Gas Sci. Eng. 2019, 71, 102966. [Google Scholar] [CrossRef]
- Yang, Z.Z.; He, R.; Li, X.; Li, Z.; Liu, Z.; Lu, Y. Application of Multi-Vertical Well Synchronous Hydraulic Fracturing Technology for Deep Coalbed Methane (DCBM) Production. Chem. Technol. Fuels Oils 2019, 55, 299–309. [Google Scholar] [CrossRef]
- Li, J.X.; Dong, S.; Hua, W.; Yang, Y.; Li, X. Numerical Simulation on Deflecting Hydraulic Fracture with Refracturing Using Extended Finite Element Method. Energies 2019, 12, 2044. [Google Scholar] [CrossRef] [Green Version]
- Guo, T.; Zhang, Y.; Zhang, W.; Niu, B.; He, J.; Chen, M.; Yu, Y.; Xiao, B.; Xu, R. Numerical simulation of geothermal energy productivity considering the evolution of permeability in various fractures. Appl. Therm. Eng. 2022, 201, 117756. [Google Scholar] [CrossRef]
- Zhu, H.; Tang, X.; Song, Y.; Li, K.; Xiao, J.; Dusseault, M.B.; McLennan, J.D. An Infill Well Fracturing Model and Its Microseismic Events Barrier Effect: A Case in Fuling Shale Gas Reservoir. SPE J. 2021, 26, 113–134. [Google Scholar] [CrossRef]
- Ren, X.; Zhou, L.; Zhou, J.; Lu, Z.; Su, X. Numerical analysis of heat extraction efficiency in a multilateral-well enhanced geothermal system considering hydraulic fracture propagation and configuration. Geothermics 2020, 87, 101834. [Google Scholar] [CrossRef]
- Zheng, H.; Pu, C.; Xu, E.; Sun, C. Numerical investigation on the effect of well interference on hydraulic fracture propagation in shale formation. Eng. Fract. Mech. 2020, 228, 106932. [Google Scholar] [CrossRef]
- Guo, T.; Wang, X.; Li, Z.; Gong, F.; Lin, Q.; Qu, Z.; Lv, W.; Tian, Q.; Xie, Z. Numerical simulation study on fracture propagation of zipper and synchronous fracturing in hydrogen energy development. Int. J. Hydrog. Energy 2019, 44, 5270–5285. [Google Scholar] [CrossRef]
- Zheng, P.; Zhou, D. Study on fracture propagation and interaction mechanism during hydraulic fracturing. IOP Conf. Ser. Earth Environ. Sci. 2021, 621, 012134. [Google Scholar] [CrossRef]
- Zheng, P.; Xia, Y.; Yao, T.; Jiang, X.; Xiao, P.; He, Z.; Zhou, D. Formation mechanisms of hydraulic fracture network based on fracture interaction. Energy 2022, 243, 1–16. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, S.; Zou, Y.; Ma, X.; Li, N.; Liu, L. Experimental investigation into simultaneous and sequential propagation of multiple closely spaced fractures in a horizontal well. J. Pet. Sci. Eng. 2021, 202, 108531. [Google Scholar] [CrossRef]
- Ju, Y.; Li, Y.; Wang, Y.; Yang, Y. Stress shadow effects and microseismic events during hydrofracturing of multiple vertical wells in tight reservoirs: A three-dimensional numerical model. J. Nat. Gas Sci. Eng. 2020, 84, 103684. [Google Scholar] [CrossRef]
- Sobhaniaragh, B.; Trevelyan, J.; Mansur, W.J.; Peters, F.C. Numerical simulation of MZF design with non-planar hydraulic fracturing from multi-lateral horizontal wells. J. Nat. Gas Sci. Eng. 2017, 46, 93–107. [Google Scholar] [CrossRef] [Green Version]
- Sukumar, S.; Weijermars, R.; Alves, I.; Noynaert, S. Analysis of Pressure Communication between the Austin Chalk and Eagle Ford Reservoirs during a Zipper Fracturing Operation. Energies 2019, 12, 1469. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Zhang, D. A Fully Coupled Model for Hydraulic-Fracture Growth During Multiwell-Fracturing Treatments: Enhancing Fracture Complexity. In Proceedings of the SPE Reservoir Simulation Conference, Montgomery, TX, USA, 20–22 February 2017. [Google Scholar]
- Kumar, D.; Ghassemi, G. A three-dimensional analysis of simultaneous and sequential fracturing of horizontal wells. J. Pet. Sci. Eng. 2016, 146, 1006–1025. [Google Scholar] [CrossRef]
- Kumar, D.; Ghassemi, A. Three-Dimensional Poroelastic Modeling of Multiple Hydraulic Fracture Propagation from Horizontal Wells. Int. J. Rock Mech. Min. Sci. 2018, 105, 192–209. [Google Scholar] [CrossRef]
- Chen, X.; Li, Y.; Zhao, J.; Xu, W.; Fu, D. Numerical investigation for simultaneous growth of hydraulic fractures in multiple horizontal wells. J. Nat. Gas Sci. Eng. 2018, 51, 44–52. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, L.; Gao, R.; Xu, G.; Liu, X.; Mo, S.; Fan, M.; Wang, X. Numerical Analysis of Zipper Fracturing Using a Non-Planar 3D Fracture Model. Front. Earth Sci. 2022, 10, 808183. [Google Scholar] [CrossRef]
- Xu, W.; Zhao, J.; Rahman, S.S.; Li, Y.; Yuan, Y. A Comprehensive Model of a Hydraulic Fracture Interacting with a Natural Fracture: Analytical and Numerical Solution. Rock Mech. Rock Eng. 2018, 52, 1095–1113. [Google Scholar] [CrossRef]
- Li, K.; Huang, L.-h.; Huang, X.-c. Propagation simulation and dilatancy analysis of rock joint using displacement discontinuity method. J. Cent. South Univ. 2014, 21, 1184–1189. [Google Scholar] [CrossRef]
- Cheng, W.; Jiang, G.; Jin, Y. Numerical simulation of fracture path and nonlinear closure for simultaneous and sequential fracturing in a horizontal well. Comput. Geotech. 2017, 88, 242–255. [Google Scholar] [CrossRef]
- Atkinson, B.K. Fracture Mechanics of Rock; Academic Press: London, UK, 1987. [Google Scholar]
- Geertsma, J.; De Klerk, F. A rapid method of predicting width and extent of hydraulically induced fractures. J. Pet. Technol. 1969, 21, 1571–1581. [Google Scholar] [CrossRef]
- Kim, J.-H.; Paulino, G.-H. On Fracture Criteria for Mixed-Mode Crack Propagation in Functionally Graded Materials. Mech. Adv. Mater. Struct. 2007, 14, 227–244. [Google Scholar] [CrossRef]
- Cheng, W.; Jin, Y.; Chen, M. Reactivation mechanism of natural fractures by hydraulic fracturing in naturally fractured shale reservoirs. J. Nat. Gas Sci. Eng. 2015, 23 Pt P3, 431–439. [Google Scholar] [CrossRef]
- Crouch, S.L. Solution of plane elasticity problems by the displacement discontinuity method. I. Infinite body solution. Int. J. Numer. Methods Eng. 1976, 10, 301–343. [Google Scholar] [CrossRef]
- Crouch, S.L.; Starfield, A.M. Boundary Element Methods in Solid Mechanics; Goerge Allen and Unwin: London, UK, 1983. [Google Scholar]
- Chen, X.; Zhao, J.; Li, Y.; Yan, W.; Zhang, X. Numerical Simulation of Simultaneous Hydraulic Fracture Growth Within a Rock Layer: Implications for Stimulation of Low-Permeability Reservoirs. J. Geophys. Res. Solid Earth 2019, 124, 13227–13249. [Google Scholar] [CrossRef]
- Le Calvez, J.H.; Craven, M.E.; Klem, R.C.; Baihly, J.D.; Bennett, L.A.; Brook, K. Real-time microseismic monitoring of hydraulic fracture treatment: A tool to improve completion and reservoir management. In Proceedings of the SPE Hydraulic Fracturing Technology Conference (Society of Petroleum Engineers), College Station, TX, USA, 29–31 January 2007. [Google Scholar]
- Cheng, W.; Gao, H.; Jin, Y.; Chen, M.; Jiang, G. A study to assess the stress interaction of propped hydraulic fracture on the geometry of sequential fractures in a horizontal well. J. Nat. Gas Sci. Eng. 2017, 37, 69–84. [Google Scholar] [CrossRef]
- Goodman, R.E.; Taylor, R.L.; Brekke, T.L. A Model for the Mechanics of Jointed Rock. J. Soil Mech. Found. Div. 1968, 94, 637–659. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, L.; Qi, S.; Yang, D. Empirical ratio of dynamic to static stiffness for propped artificial fractures under variable normal stress. Eng. Geol. 2020, 273, 105683. [Google Scholar] [CrossRef]
- Indraratna, B.; Oliveira, D.A.F.; Brown, E.T. A shear-displacement criterion for soil-infilled rock discontinuities. Géotechnique 2010, 60, 623–633. [Google Scholar] [CrossRef]
- Olson, J.E. Fracture aperture, length and pattern geometry development under biaxial loading: A numerical study with applications to natural, cross-jointed systems. Geol. Soc. Lond. Spec. Publ. 2007, 289, 123–142. [Google Scholar] [CrossRef]
- Erdogan, F.; Sih, G.C. On The Crack Extension in Plates Under Plane Loading and Transverse Shear. J. Basic Eng. 1963, 85, 519–525. [Google Scholar] [CrossRef]
- Sneddon, I.N.; Elliott, H.A. The opening of a Griffith crack under internal pressure. Q. Appl. Math. 1946, 4, 262–267. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element Number | (Analytical Results, 1.3293) | (Analytical Results, 0.7765) | ||
|---|---|---|---|---|
| The Relative Error | The Relative Error | |||
| r | 5.0% | 1.2622 | 6.1% | 0.7288 |
| 4 | 2.1% | 1.3016 | 3.2% | 0.7515 |
| 6 | 1.1% | 1.3151 | 2.1% | 0.7593 |
| 10 | 0.2% | 1.3261 | 1.4% | 0.7657 |
| Young’s modulus (MPa) | 19,830 | Minimum horizontal stress (MPa) | −20 |
| Poisson’s ratio | 0.261 | Fracture toughness (MPa·m1/2) | 2.5 |
| Maximum horizontal stress (MPa) | −24 | Injection pressure (MPa) | −20 |
| Injection angle (°) | 90 | Fracturing cluster number | 3 |
| Fracture spacing(m) | 40 | Perforating depth (m) | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, P.; Gu, T.; Liu, E.; Zhao, M.; Zhou, D. Simulation of Fracture Morphology during Sequential Fracturing. Processes 2022, 10, 937. https://doi.org/10.3390/pr10050937
Zheng P, Gu T, Liu E, Zhao M, Zhou D. Simulation of Fracture Morphology during Sequential Fracturing. Processes. 2022; 10(5):937. https://doi.org/10.3390/pr10050937
Chicago/Turabian StyleZheng, Peng, Tuan Gu, Erhu Liu, Ming Zhao, and Desheng Zhou. 2022. "Simulation of Fracture Morphology during Sequential Fracturing" Processes 10, no. 5: 937. https://doi.org/10.3390/pr10050937
APA StyleZheng, P., Gu, T., Liu, E., Zhao, M., & Zhou, D. (2022). Simulation of Fracture Morphology during Sequential Fracturing. Processes, 10(5), 937. https://doi.org/10.3390/pr10050937