1. Introduction
With the development of modern electric energy, wind energy has been developed rapidly due to the environmentally friendly features. From an energy conversion perspective, the wind turbine generator system (WTGS) is the device that converts wind energy into electrical energy, which takes the active power set-point as input and outputs the electric power to the grid. Controllers within the WTGS are working in coordination to guarantee the WTGS power output tracks the power demand [
1]. Over the past few years, many achievements have been introduced in wind turbine control to improve the wind turbine load conditions and stabilize the power output. Usually the wind turbine is mainly controlled with different targets by region.When the wind speed is between the cut-in wind speed and the rated wind speed, the maximum power point track (MPPT) strategy will be adopted to control the generator torque which guarantees that the WTGS will follow the optimal tip speed ratio and optimal wind-power utilization coefficient [
2]. When the wind speed is above the rated speed, a power limitation strategy will be used to limit the power at the rated condition [
3]. When the power demand is lower than the WTGS capacity, the power limitation strategy will also be used to limit the generator power output to meet the power demand. From another perspective, when the wind turbine nonlinear dynamic characteristic and the turbine stochastic behavior caused by wind speed randomness are concerned, research has been done to optimize the wind turbine control [
4,
5].
In the industrial field, WTGSs are organized and controlled under a wind farm. A wind farm usually contains several WTGSs and serves as a control and transmission center between WTGSs and the electric power grid. The wind farm will calculate the predicted farm available power based on the wind speed predictions and upload the predicted result to the power grid dispatch center. It will then take the wind farm power demand set-point from the dispatch center and control the power set-point for each inner WTGSs to make sure the wind farm power output follows the power demand. Typical wind farm power strategies can be referred to from [
6,
7]. Since the wind farm power output is usually less than the available power, WTGSs in the wind farm may limit the power output to less than the available power and the reserved part can be used for further improvement. One proposed wind farm distributed model is where predictive control with a clustering-based piece-wise affine wind turbine model, where the complete wind turbine model is used and the wind farm is set to track the active power output as the conventional strategy while reducing the wind turbine loads, [
8,
9]. Another farm-level load-reduction strategy is introduced in [
10,
11], of which the power tracking error and load conditions are all considered in the cost function and solved by a centralized model predictive controller. In [
12], a distributed model predictive control strategy is also applied in wind farm active power control to optimize the wind farm power output. Both dual decomposition based on fast gradient updates (DDFG) and alternating direction method of multipliers (ADMM) methods are introduced to solve the optimization problem distributively or in parallel in favor of fast solving for wind farm active power control. When the wind farm is connected into the power grid, voltage will be an important parameter that will need to be considered. In [
13] proposes a VSC-HVDC (Voltage Source Converter based High Voltage Direct Current Transmission) connected wind farm active control when the voltage variation is taken into consideration to improve the wind farm voltage control performance. Since the WTGSs in the wind farm are growing in numbers, the optimization problem from the wind farm level will also increase in orders and solving time. Some corresponding decentralized strategies are also investigated in wind farm power and voltage control process to reach an acceptable control effect. Related researches can be referred to [
14,
15]. With the increasing proportion of the wind power in the power system, wind power gradually begins to assume the task of peak load and frequency regulation of the power system as an important part of the power supply side [
16]. The work in [
17] reviews some wind farm active power control methods where the wind farm can be regarded as a frequency modulation unit to balance the power grid electric supply and demand, and further support the grid frequency under emergency conditions.
In addition to the wind power related research, there have been many experts and scholars who analyze other aspects to improve the environmental friendliness of current energy systems. Renewable energies could be connected together to the electric power system which can cause problems in power system integration and control. The work in [
18] proposes the modeling and control design for a novel model of smart grid-connected PV/WT (Photovoltaic Module/Wind Turbine) hybrid systems. All of the photo-voltaic array, wind turbine, asynchronous (induction) generator, controller and converters are integrated in the designed power system. Considering that the optimization process usually contains more than one optimization target, several multi-objective optimization strategies have been adopted in energy systems and industrial processes. A novel combined cooling, heating and power (CCHP) based compressed air energy storage system is proposed in [
19], in which the evolutionary multi-objective algorithm is used to optimize the overall exergy efficiency and the total specific cost of product of the novel CCHP system. In [
20,
21] they propose multi-objective energy benchmarks based on the energy consumption forecast and integrated assessment. The method for developing the dynamic energy benchmark for mass production in machining systems is also introduced. These works provide advanced strategies for energy systems from different perspectives for different application objects, which are also useful for the work in this paper.
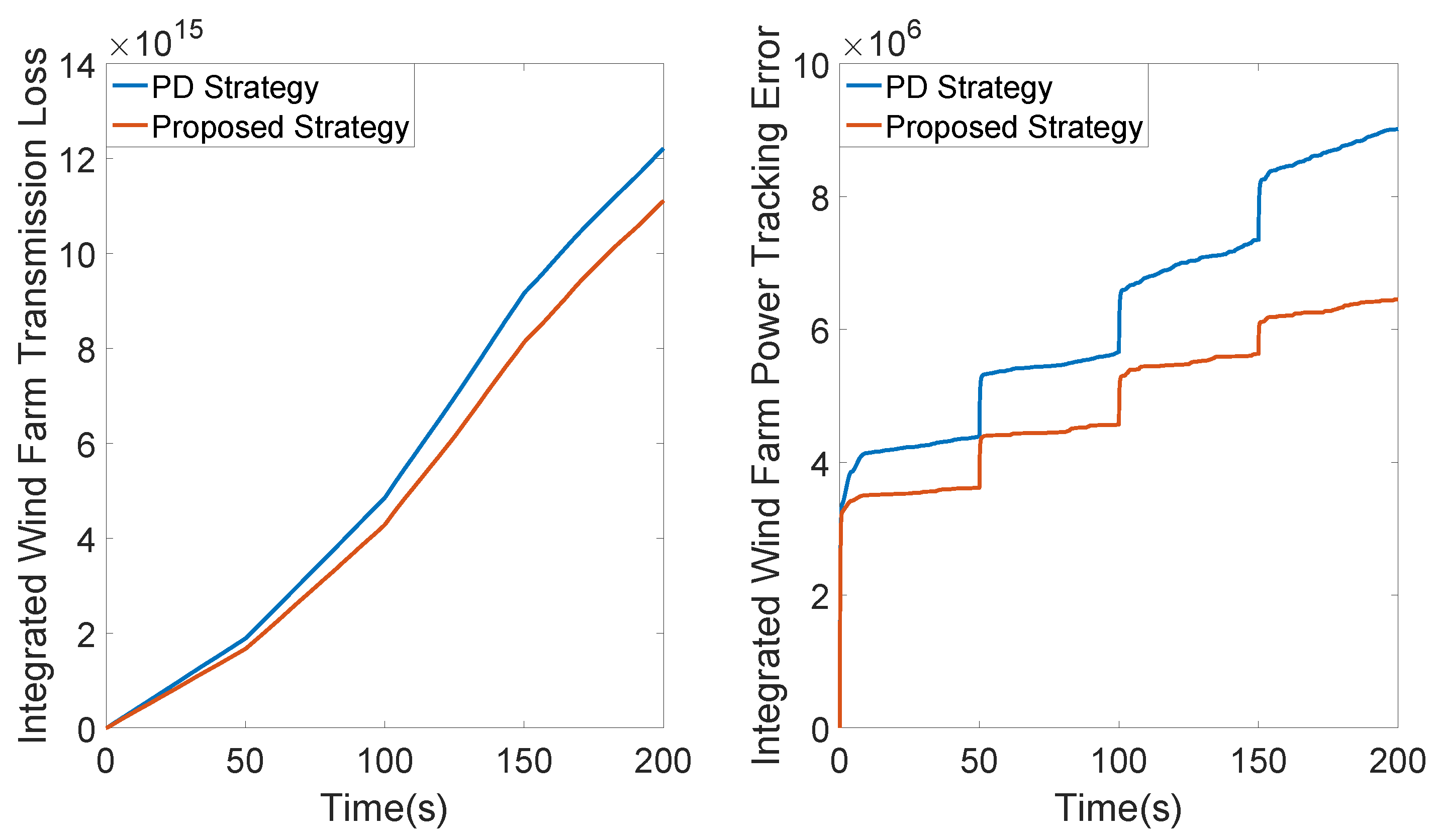
Usually, the wind farm power set-point is less than or equal to the wind farm prediction available power. When the power set-point is equal to the available power, wind turbines in the wind farm output all the available power to track the power demand. There would be no power distribution process under such a condition and all units are free to generate electricity. In the other circumstance, a power limitation strategy is needed. The wind farm control center will dispatch the power set-point to all units according to the available power of each unit to make sure the power output is following power set-point. Under such a circumstance, the unit power output will be less than the available power. The gap between the power set-point and available power could be adopted for further improvement. Although the previous strategies are useful and efficient, there still exist several potential parts which can be further improved in details. Firstly, with the increased number of WTGSs in a wind farm, wind farm capacity is growing and the power loss caused by power transmission is also growing significantly. WTGSs are usually connected to booster stations before the farm level main transformer, and the transmission line between WTGSs to the booster stations is usually with lower or medium voltage level, which plays the most significant role in power transmission loss. Since the transmission line between different units to booster stations are different, the transmission loss characteristics between units are usually different and should be taken into consideration during wind farm active power distribution. Secondly, the wind farm power output usually fluctuates around the wind farm power set-point due to the WTGS power tracking process, the power tracking error should be reduced or even eliminated through improving the wind farm control algorithm.
As the main contribution of this paper, a wind farm active power distribution strategy is proposed to improve the wind farm power output and power loss caused by transmissions. WTGSs are investigated with the power tracking characteristics and power transmission losses. Firstly, the WTGS power tracking process is modeled as a first-order inertial link. Furthermore, the control horizon recedes with time and the power tracking error caused by WTGS dynamic characteristic will be modeled in the optimization cost function, which would be minimized during the control horizon. Besides, the wind farm transmission loss is also served as another part in the cost function. In
Section 2, a typical wind farm topology and the power transmission loss are firstly introduced. In
Section 3, the WTGS power tracking dynamic characteristic is modeled as a first-order inertial link. The proposed wind farm active power receding horizon control strategy is introduced in
Section 4, where the corresponding predictive model, cost function and constraints are explained in details. To verify the effectiveness of the proposed strategy, a wind farm with 20 units is defined and simulated in
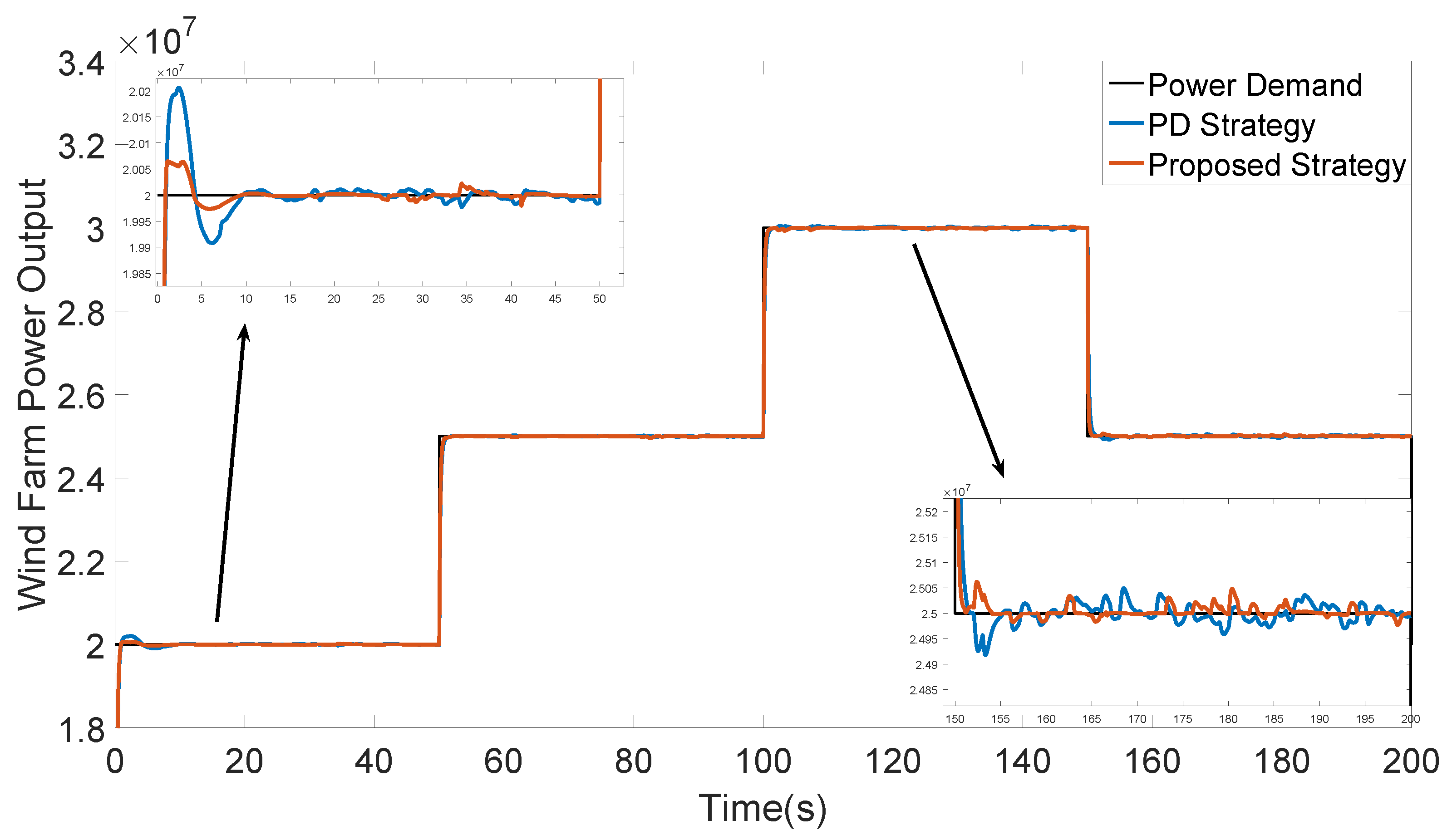
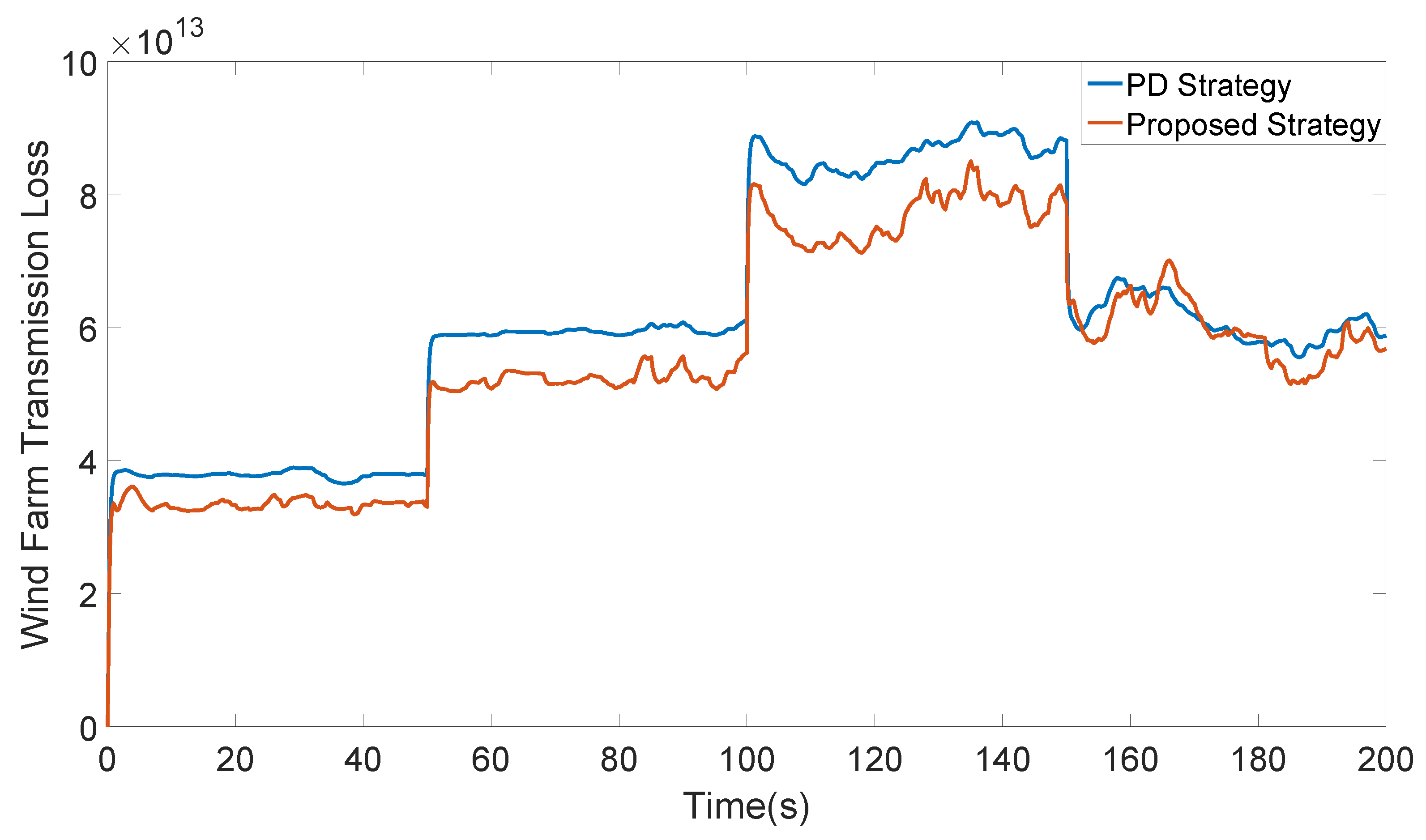
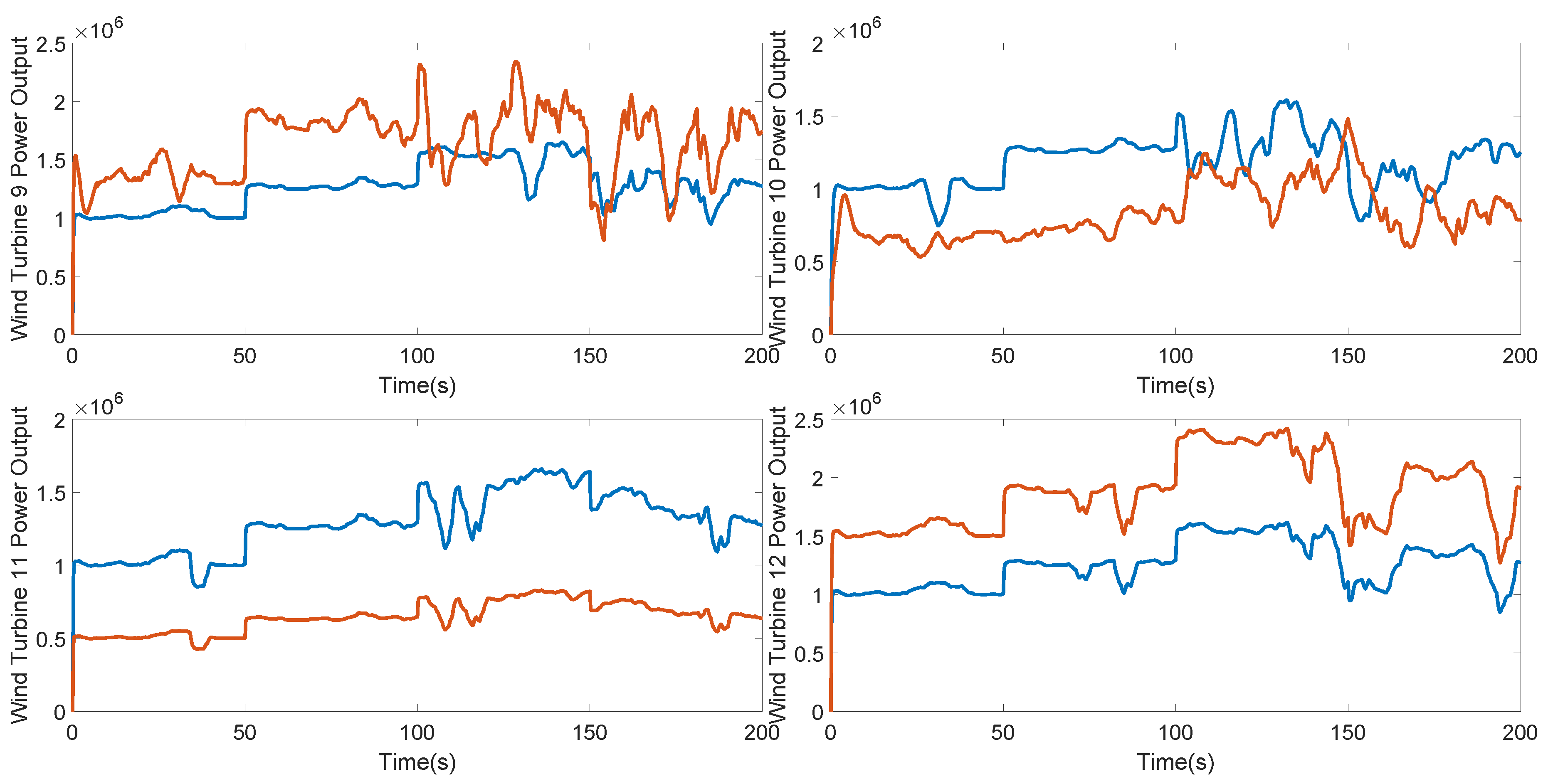
Section 5. Both the conventional strategy and the proposed strategy are adopted and compared to show the difference. The proposed strategy is shown to be a feasible and effective strategy that improves the wind farm in both power tracking error and transmission loss.
Section 6 concludes this paper.
2. Wind Farm Topology and Power Transmission Loss
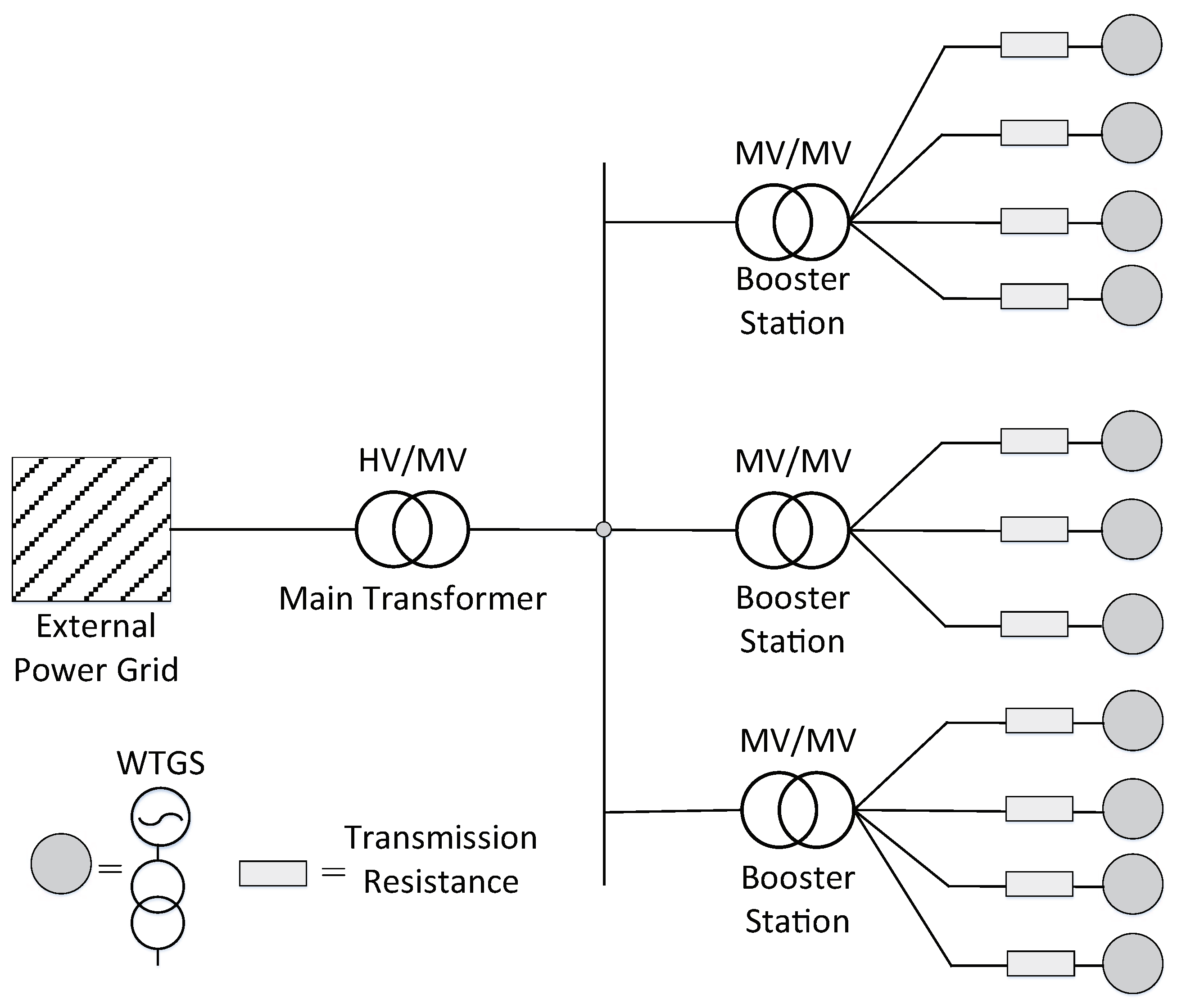
As is known, a number of wind turbines work together in a wind farm, which are usually controlled uniformly to make sure the wind farm power output follows the power demand set-point from the power grid. Considering the electric power output from WTGSs is usually in a middle level voltage, a double layer booster structure usually exists in the wind farm to increase the electric voltage before connected to the power grid, the WTGSs in the wind farm can be divided into clusters by the booster station connections. Several WTGSs within an area are connected under one booster station, the boost station will increase the voltage (from 33 kV to 110 kV) and different booster stations are connected to the wind farm main transformer, through which the voltage will be further improved (from 110 kV to 330 kV) and then output to the external electric power grid. A typical wind farm topology can be shown as
Figure 1. In this figure, MV and HV are rating on the voltage level, where MV is medium voltage, and HV is high voltage. The voltage rating might be different under different scenarios. In usual, HV stands for the voltage higher than 110 kv, and MV stands for a voltage level between 3 kV to 110 kV. LV may also be used as for low voltage which indicates a voltage level under 3 kV. It should be noted that, the voltage level at booster stations or transformers and the wind farm topology may be different since the wind farm may follow different standard files. The listed numbers and topology is only one typical condition, which is considered in this study.
The power transmission loss is defined as the power loss due to the transmission line between WTGSs and the booster station, i.e., the resistance on the transmission line causes a drop in power at the front and rear of the transmission. Limited by the voltage, the power loss between WTGSs and booster stations is the main part in the wind farm power transmission loss. After the booster device, the increase in voltage will decrease the current and reduce power loss due to resistance electro-thermal effect. Since the transmission line between WTGSs and booster stations are with the same material and thickness, the increase in distance will proportionally increase the transmission resistance. On the other hand, the transmission loss is proportional to the squared transfer current, and WTGSs usually output electric power as a constant voltage source:
in which
I is the transmission current on the transmission line,
P is the transmission power which is also the active power output of the considered unit, and
U is the transmission voltage. Thus the transmission loss can be simplified and expressed in the following form:
in which
M is the power transmission loss due to the resistance electro-thermal effect,
D is the distance between WTGSs and booster stations,
P is the WTGS output power and
K is a constant number to assist in calculation. Set
and
can be used as a simplified form to calculate transmission loss, which serves as a cost function during the active power distribution.
3. WTGS Power Tracking Dynamic Characteristic Modeling
The WTGS is essentially a nonlinear model with multiple variables and controllers to capture the wind energy and transform it into electric power. The wind-turbine cluster is defined as a cluster of WTGSs which can be controlled and scheduled uniformly. As shown in
Figure 1, several WTGSs are connected under one booster station and can be selected as a cluster and controlled uniformly. In this section, the WTGS power tracking dynamic characteristic will be analyzed and modeled in favor of the wind-turbine cluster active power control strategy.
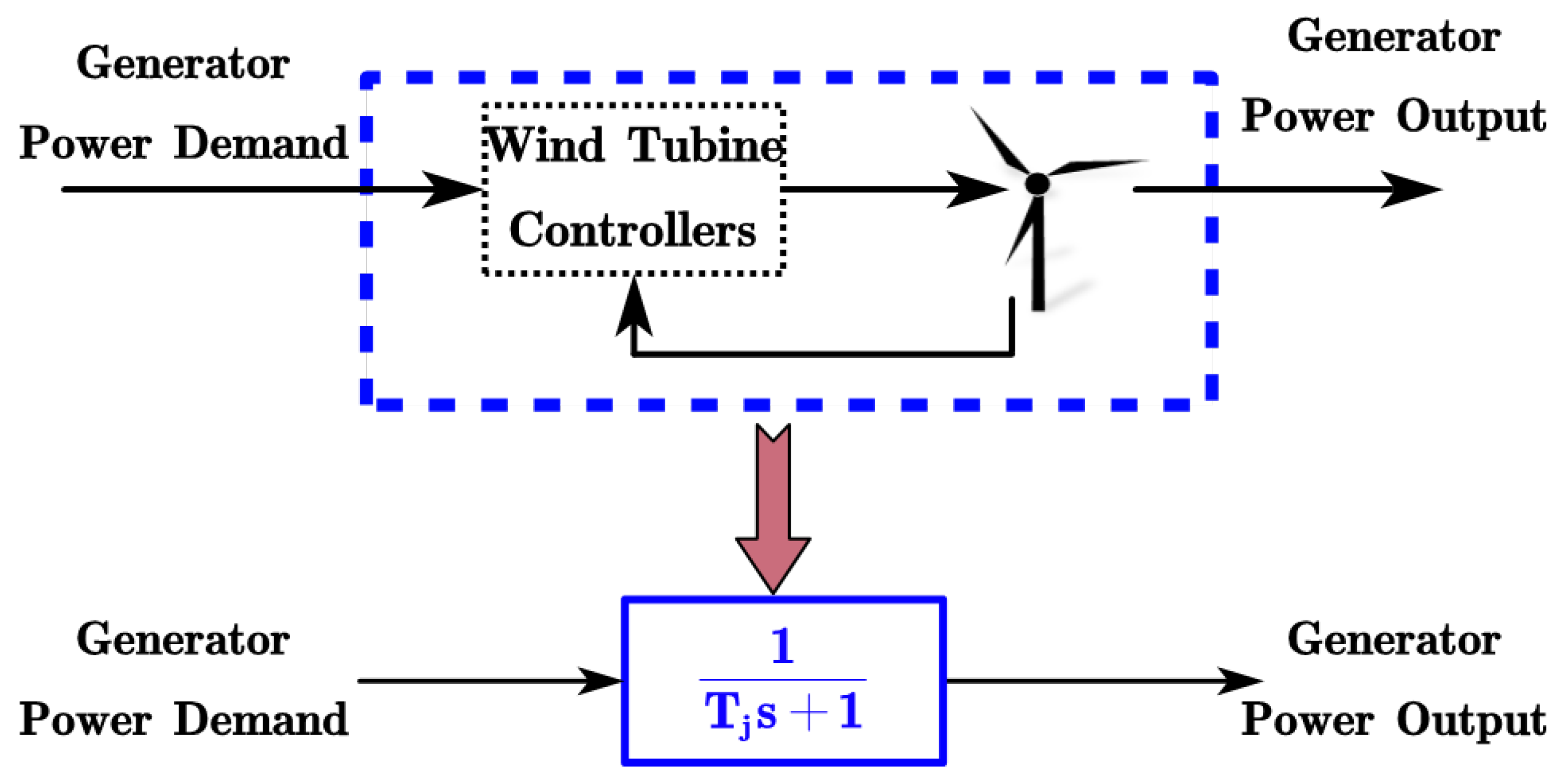
From the control design perspective, the blade pitch controller, the generator torque controller and the yaw controller are working in coordination to ensure the WTGS is functional. But from the energy transfer perspective, a WTGS usually receives active power orders from the active power controller in the wind-farm level, then adjusts the inside controllers to make sure that the generator power output catches up with the active power demand. In such a situation, the inner controllers can be regarded as WTGS inherent modules. The dynamic characteristic of power tracking for a WTGS can be reduced to a first-order inertial link from the active power demand to the generator power output, for which the input is the WTGS active power set-point from the wind farm and the output is the generator power output. The WTGS power tracking dynamic characteristic can be expressed as follows:
where
i represents the
i-th wind turbine,
is the active power set-point for the
i-th WTGS, and
is the
i-th WTGS output active power. The inertia time constant
can be easily obtained through the black box system identification and least square fit as shown in
Figure 2.
Furthermore, the WTGS active power tracking dynamic characteristic in (
3) can be rewritten as a state-space model:
in which the input
is the
i-th wind turbine active power set-point
, the state
and the output
are the
i-th wind turbine generator active power output
tracking the active power set-point.
Under such a circumstance, during the active power distributing process in a wind-turbine cluster, the cluster active power output is the combination of each inner wind-turbine active power, which is affected by the active power tracking dynamic characteristic of each WTGS in the cluster. Assume that there are a total of
n WTGSs in the cluster, then the cluster active power output could be expressed as follows:
in which the input variable is defined as the active power set-point for each WTGS with
. The state is the active power output for each WTGS with
, and the output
y is the output active power
for the specific wind-turbine cluster. The state-space model parameters are given as follows.
Clearly, (
5) provides a feasible way to model the wind-turbine cluster active power tracking as a dynamic system, and the modern control method could be adopted to control the wind-turbine cluster active power dynamic process and optimize the cluster turbines operations. The wind-turbine cluster level active power control strategy will be introduced in the next section. In order to simplify the notations, one WTGS is marked as a
unit and a wind-turbine cluster is marked as a
cluster briefly in the following analysis, and all the
power used later refers to the active power if not specially marked.
4. Wind-Farm Active Power Receding-Horizon Control Strategy
In this section, a wind farm active power receding horizon control strategy is proposed based on the established WTGS power tracking dynamic characteristics and the power transmission loss. The conventional wind farm active power control strategy which is also referred to as the proportional distribution (PD) can be expressed as:
in which
is the wind farm power set-point (demand),
is the available power forecast for the
i-th wind turbine,
is the available power for the wind farm calculated by following (
8),
is the power set-point for the
i-th wind turbine,
n is the analyzed wind turbine numbers in the wind farm. The wind farm control can be divided into two levels. For the power distribution from the wind farm to clusters, the cluster is controlled to track the power set-point from the wind farm and serves as a middle layer to distribute the power demand to each unit. In the proposed strategy, the PD strategy is used to provide the power set-point from the wind farm to clusters, where the distribution process from the wind farm to the clusters can be expressed as:
in which
is the available power forecast for the is the
j-th unit in the cluster, a total of
m units are connected to one booster station in the cluster. The active power distribution strategy from cluster to units is a power tracking error & power transmission loss based optimization strategy and is going to be introduced in following subsections.
4.1. Active Power Predictive Model
The cluster active power tracking state-space model in (
5) can be further discretized through the zero-order holder method into the following discrete state space model:
where the matrix parameters
are the discretized version from
system,
are the discretized state variable (WTGSs active power output) and input variable (WTGSs active power setpoint) at time
k. Set the initial time as
k and the prediction horizon as
N, then the predictive model can be reorganized as follows:
in which
The input variable is the predictive active power set-point for each WTGS at each prediction time step (from k to ), and state variable is the predictive WTGSs active power output at each prediction time step (from to ). Since the state variables represents the active power output for each unit at different predict time step and can be obtained through optimization, the cluster power output at each time step can be calculated directly without any further prediction.
4.2. Cost Function
The cost function is defined as follows:
in which
is the active power set-point for the wind-turbine cluster,
is the output active power of the
j-th unit at the predictive time step
t,
m is the total number of units considered in the cluster,
N is the predictive time horizon. Because the time scale of the predictive horizon is much smaller than the cluster power set-point changes, the power demand or the set-point can be regarded with no changes during one predictive horizon, so the
keeps constant during one entire predictive period. Each unit power output at one predictive step are summarized together as the cluster power output, and the 2-norm difference between the cluster power set-point and output at each predictive time steps are calculated and summarized as the cost function to be minimized.
is the distance between the
j-th unit and the booster station. In the cost function, the left side represents the tracking error between the cluster power set-point and power output, and the right side is the power transmission loss.
p is the weight parameter adopted to handle the trade-off between two considered characteristics, which is set between 0 and 1. It should be noted that both parts should be normalized in order to eliminate the effect caused by the difference between the parameters magnitudes. The cost function is not a quadratic programming problem commonly used, but its structure is not complicated and can be easily solved by the commercial optimization solver like
Mosek [
22] and
Gurobi. The
fmincon function provided within
Matlab can also provide a good optimization result. Simulations in this paper solve the optimization problem through
CVX (Version 2.1, Michael Grant and Stephen Boyd, Palo Alto, CA, USA, 2017), a package for specifying and solving convex programs [
23,
24]. The proposed strategy calculates the power distribution scheme at each time step, which is receding with the time horizon.
4.3. Constraints
Several conventional constraints are still necessary during the cost function minimization, which are listed as follows:
is the
j-th units power set-point under a conventional PD strategy. For the entire cluster, (
14) guarantees that the power set-point of all units equals to the cluster power demand, and (
15) restricts the power set for each unit within a feasible interval that each unit has the ability to track its power setting. Moreover, the upper bound is
a higher than the proportional distribution method and the lower bound is
a lower. The gap between the upper and lower boundaries is used to overcome the power fluctuations caused by inaccurate models and inaccurate wind speed, and
a is set at
in following simulations. The wind farm control structure is shown in
Figure 3.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}