Aerodynamic Performance of an Octorotor SUAV with Different Rotor Spacing in Hover


Abstract
:1. Introduction
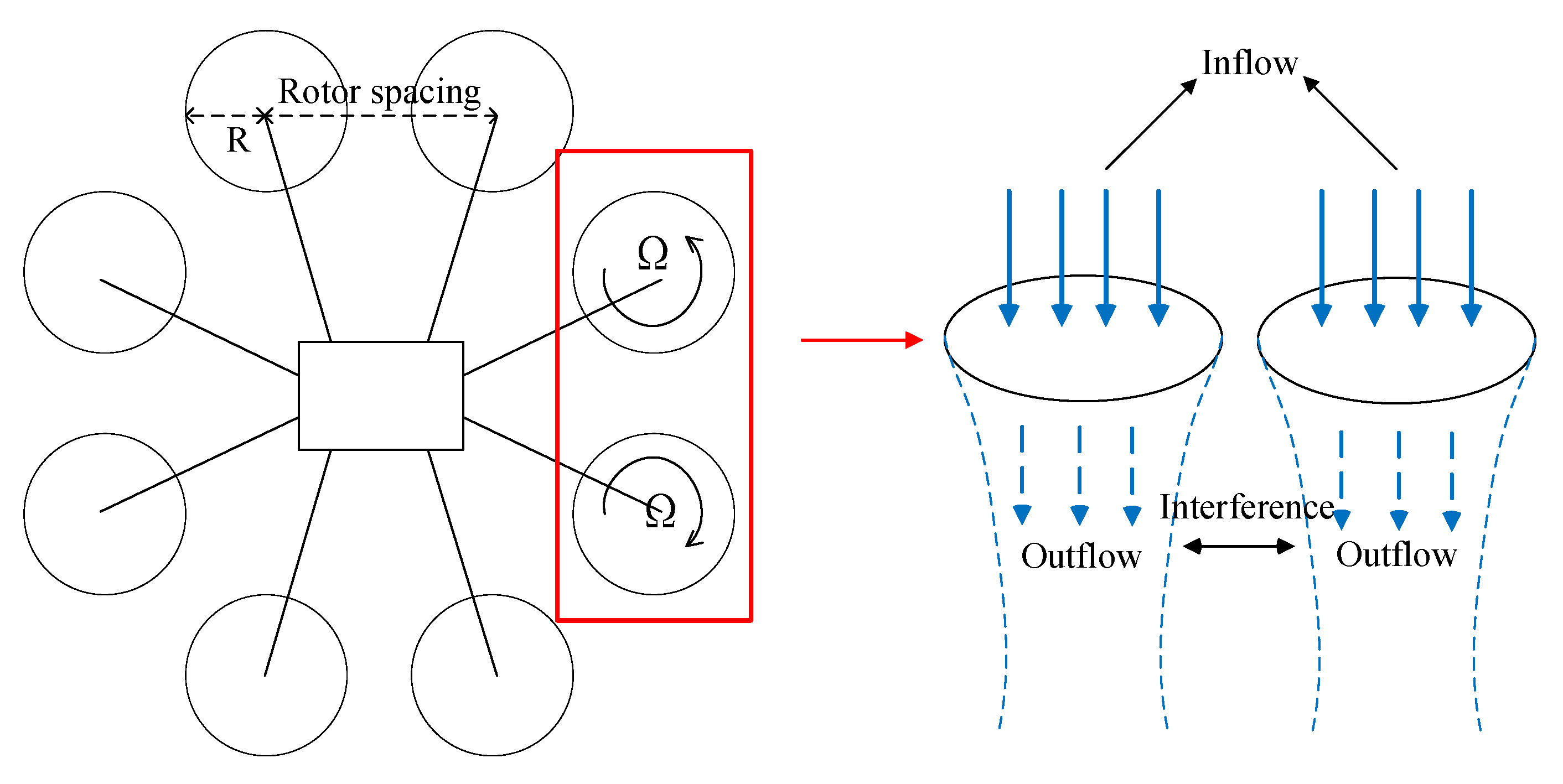
2. Theoretical Analysis
3. Hover Experiment
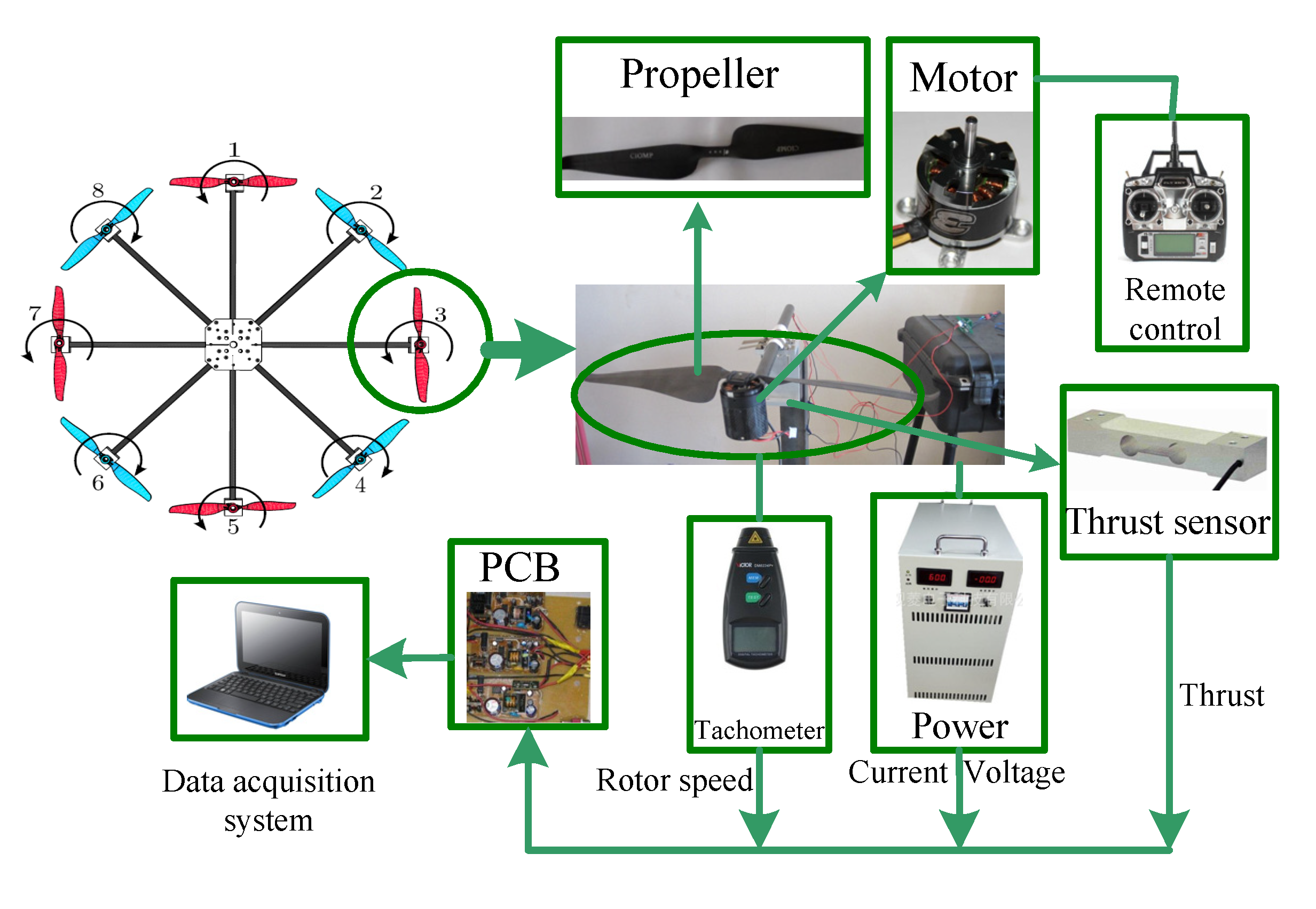
3.1. Experimental Setup
3.2. Error Analysis
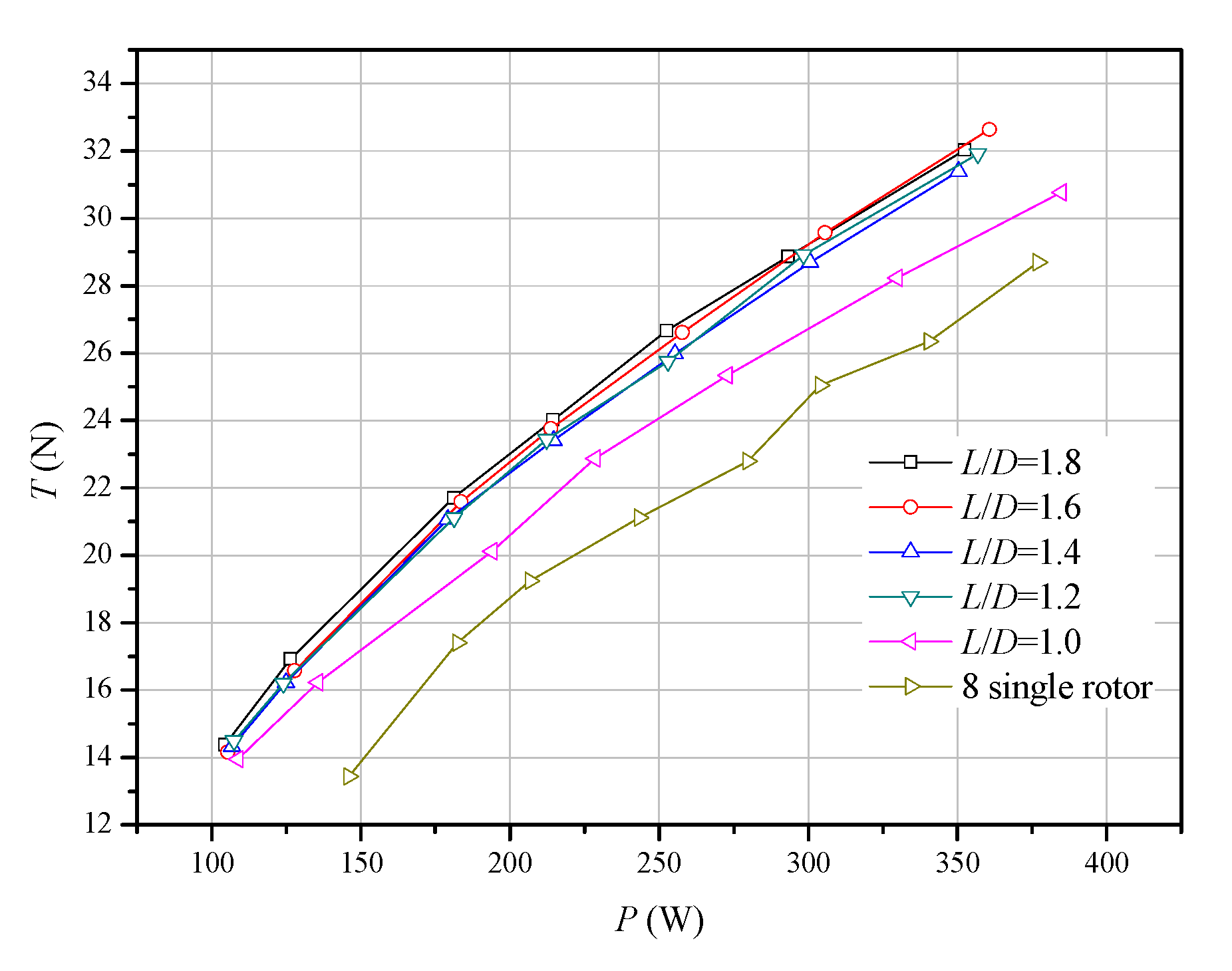
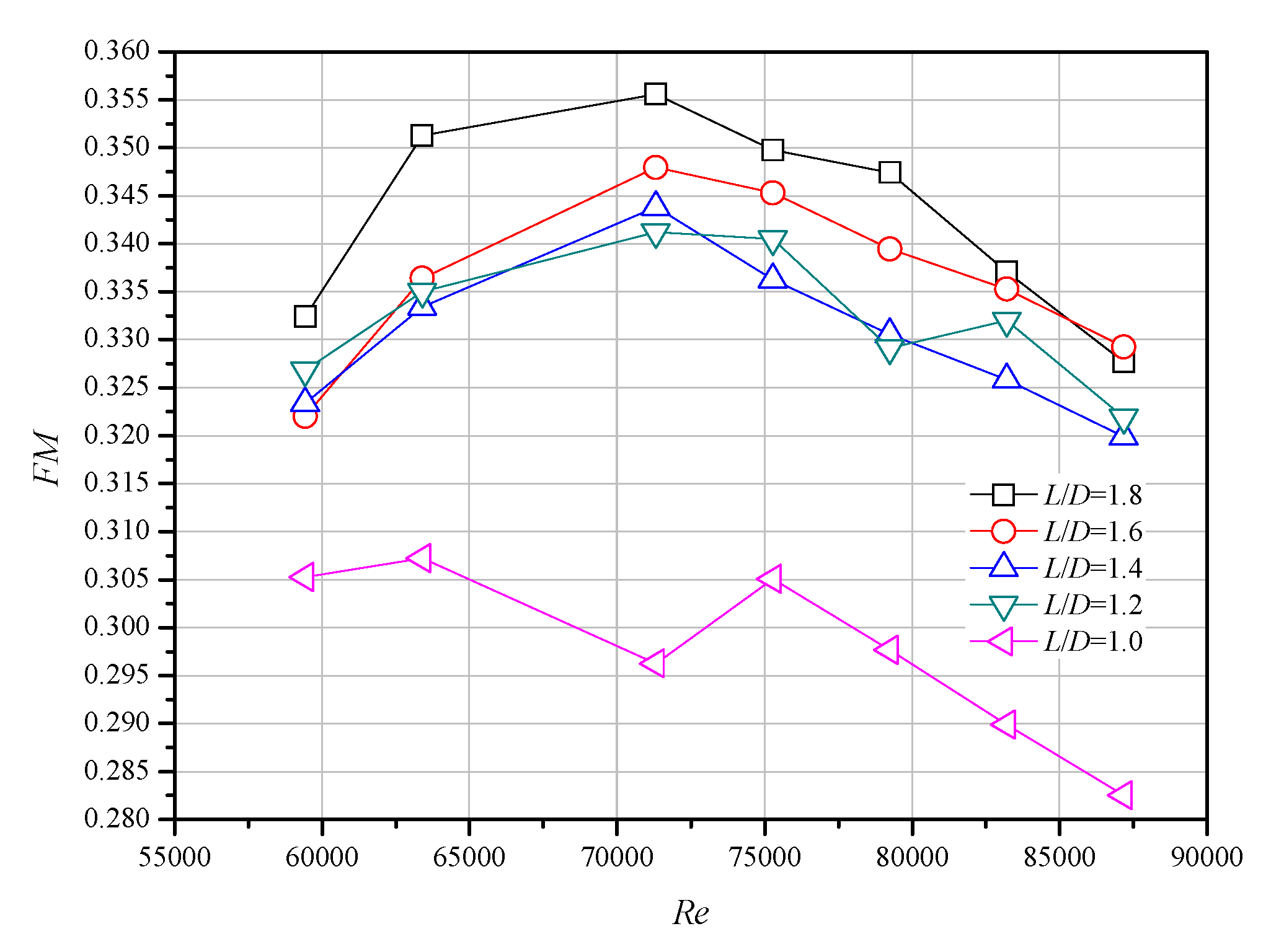
3.3. Results
4. Numerical Simulation
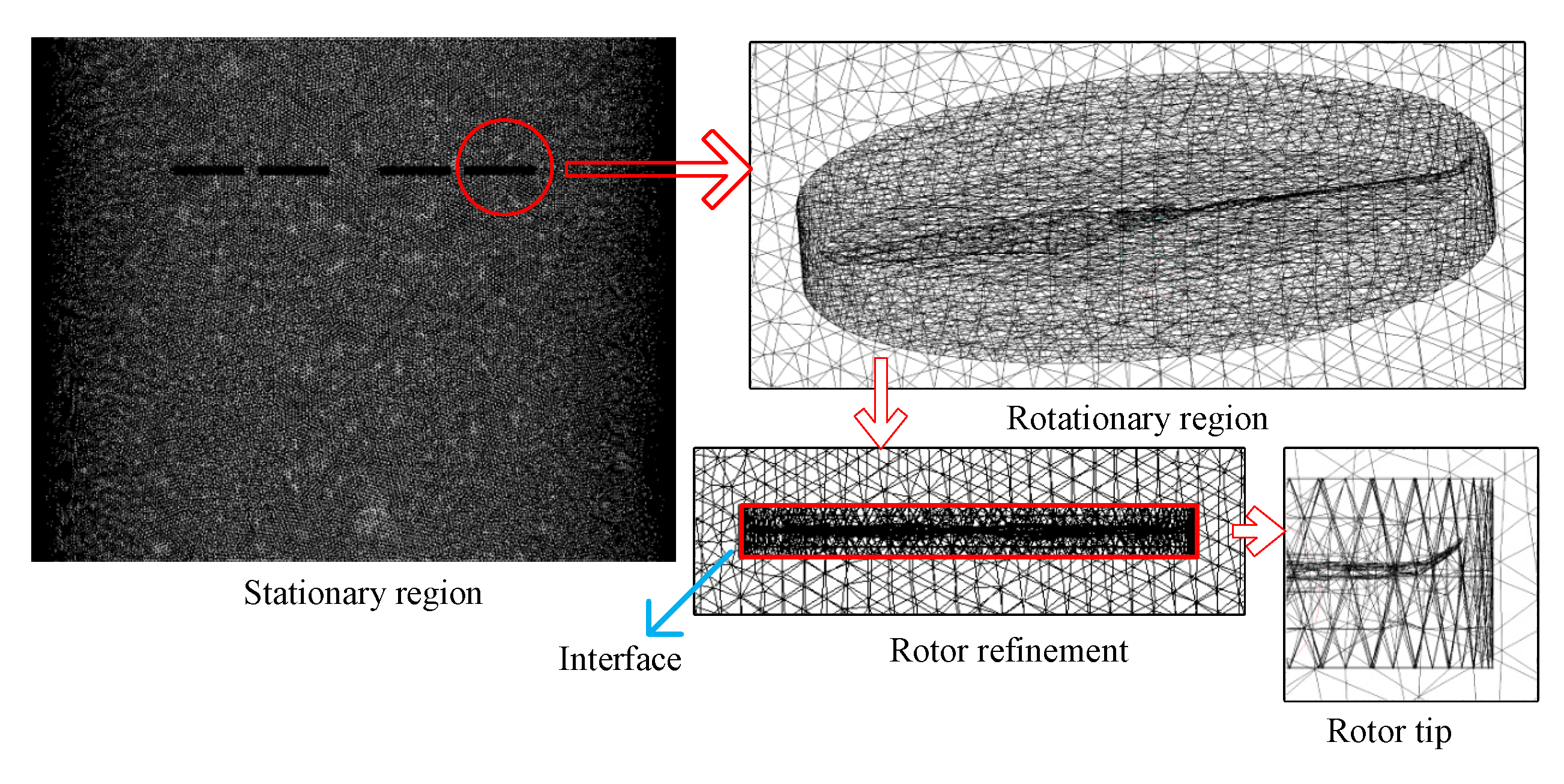
4.1. Simulation Setting and Mesh Analysis
4.2. Simulation Results
5. Conclusions
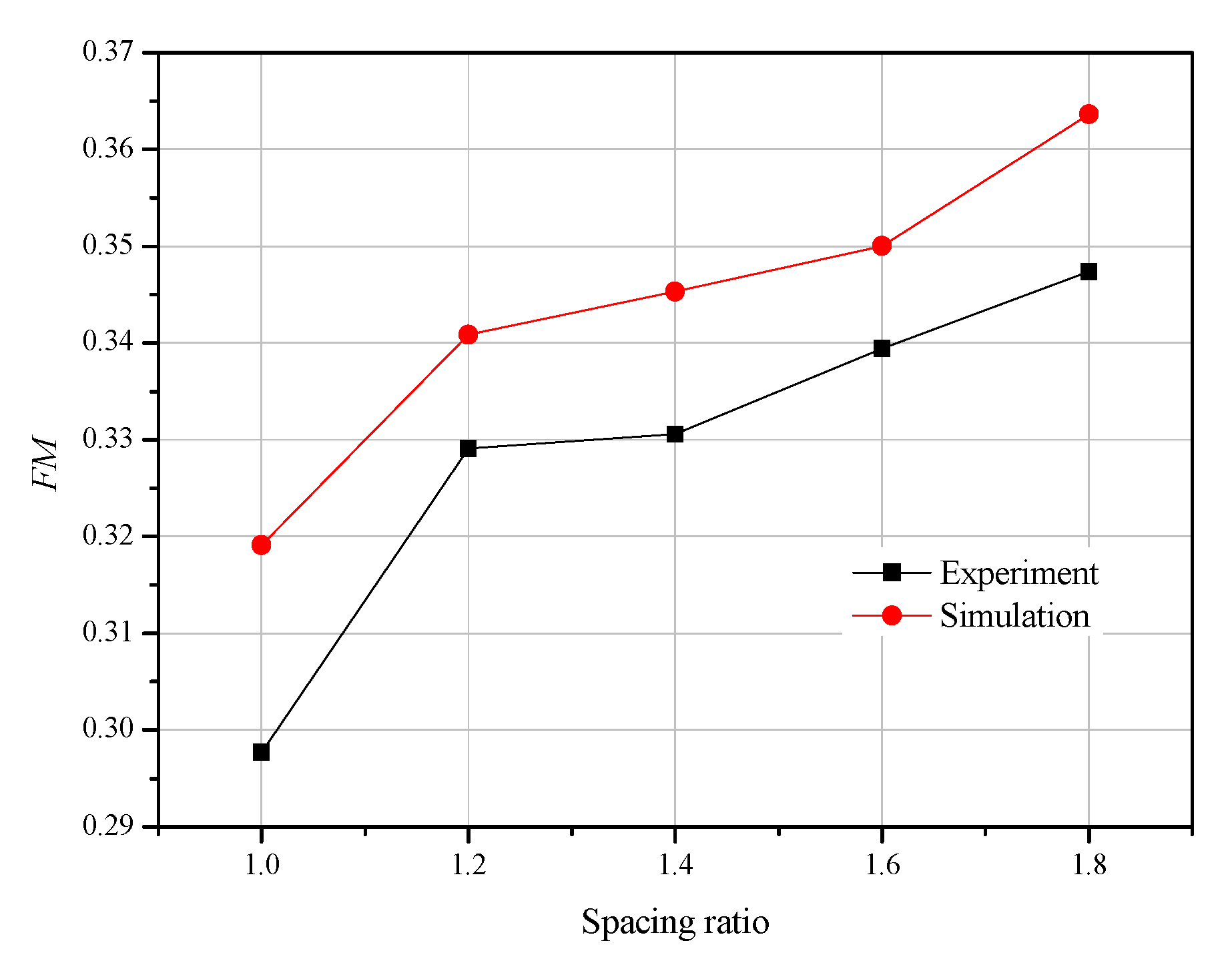
- The aerodynamic performance of the rotors change with a change of rotor spacing, but this change is not linear, and therefore it cannot be simply judged that an increase or decrease in the spacing will have a consistent impact on the aerodynamic performance of the rotors. Further analysis is needed to explore the reasons for the influence of rotor spacing on aerodynamic performance and whether or not there is a law that can be expressed mathematically. Nevertheless, through experiments, we found that FM and PL at L/D = 1.8 have obvious advantages as compared with other spacing ratio, which can be regarded as the best spacing ratio under the current working condition, while L/D = 1.0 obviously has a great negative impact on the overall aerodynamic performance due to its too small spacing.
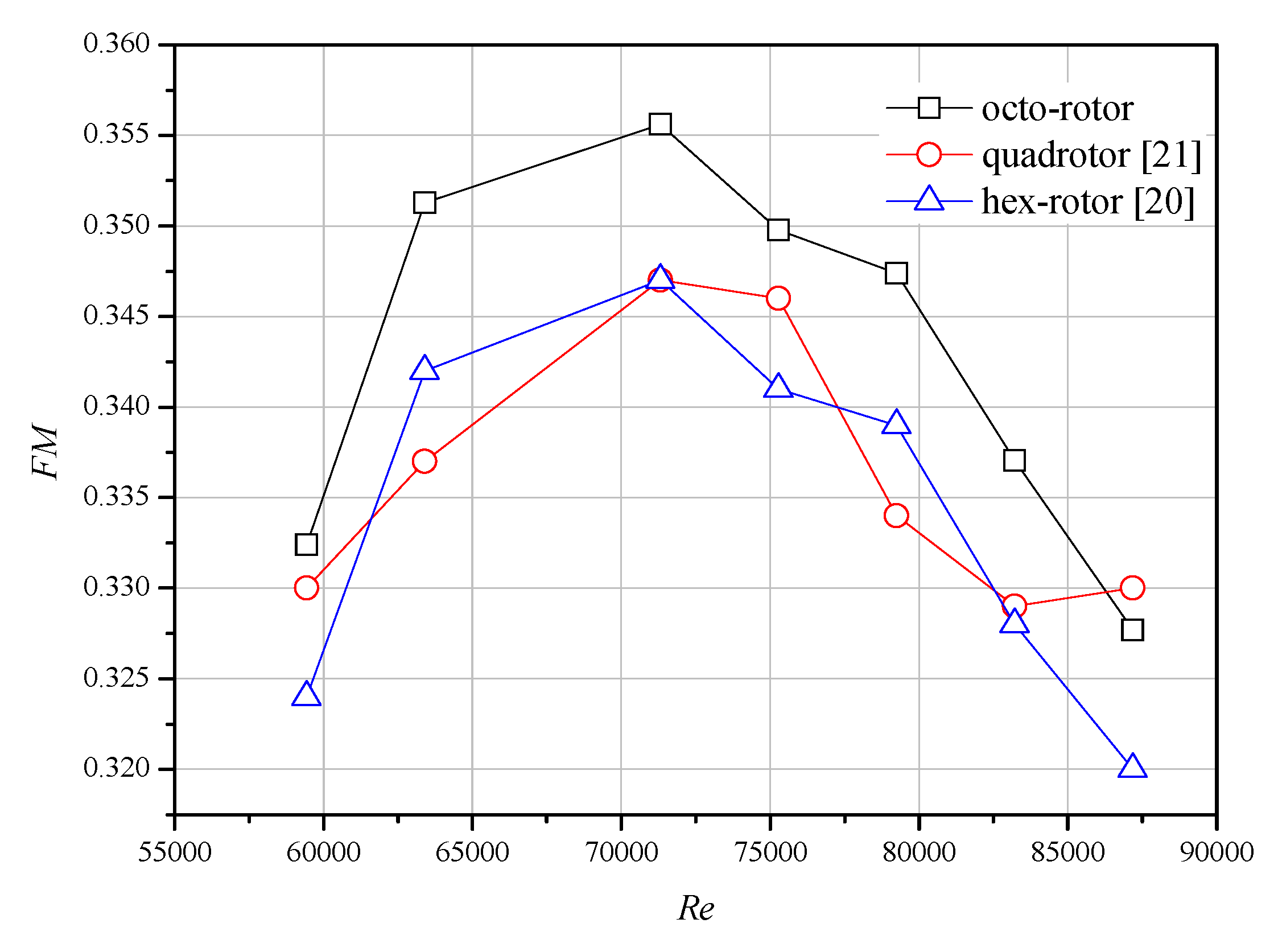
- As compared with eight single rotors, for a quadrotor and hex-rotor with the same rotor size, the FM of octorotor shows a higher value. Especially, L/D = 1.8 was proven to be the optimal rotor spacing with better aerodynamic performance. The configuration of the octorotor helps to increase the aerodynamic performance of the rotors, but at the same time increases the total area of the aircraft, resulting in a higher cost. Therefore, it is necessary to make a tradeoff on rotor arrangement and oversize of the vehicle.
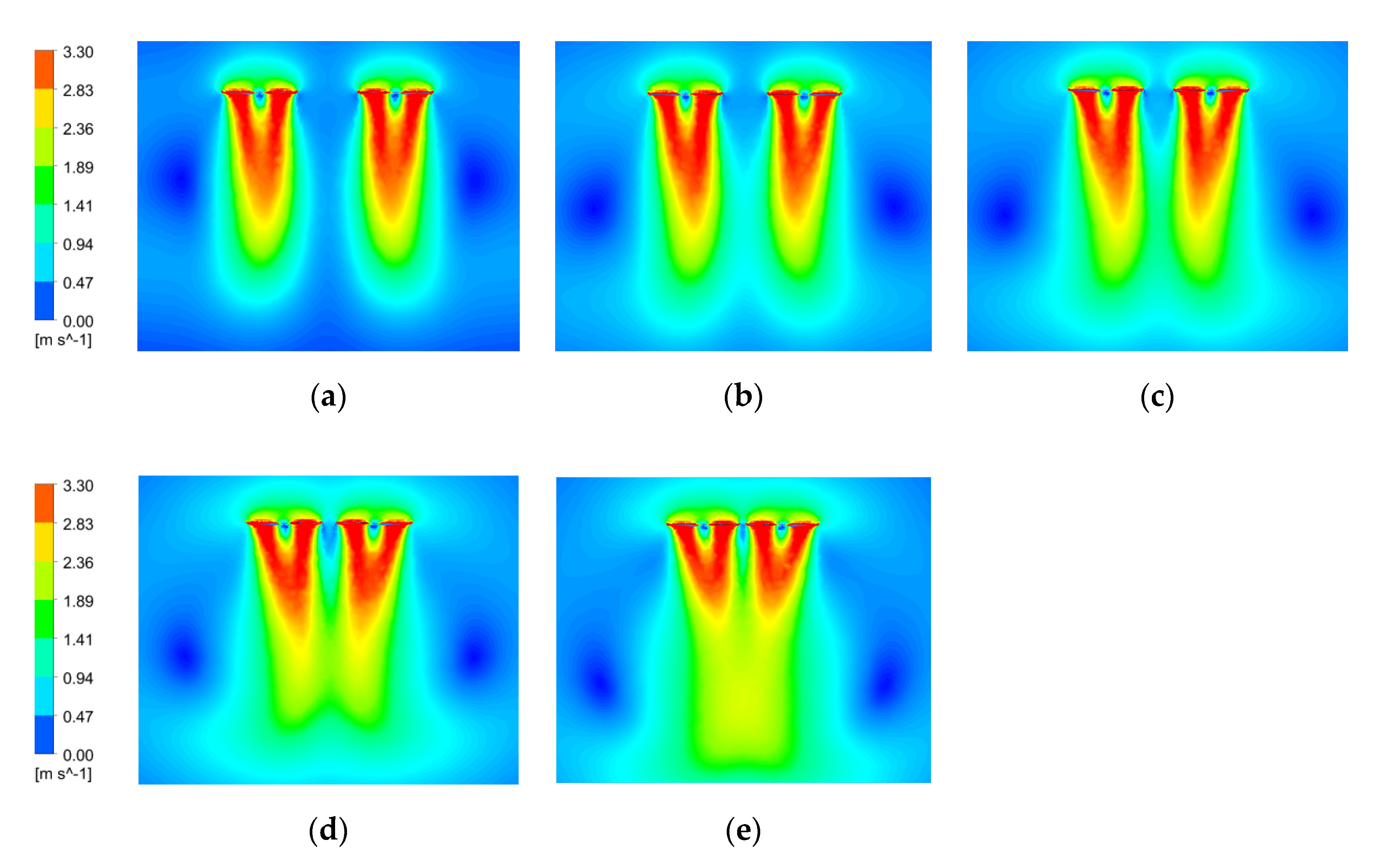
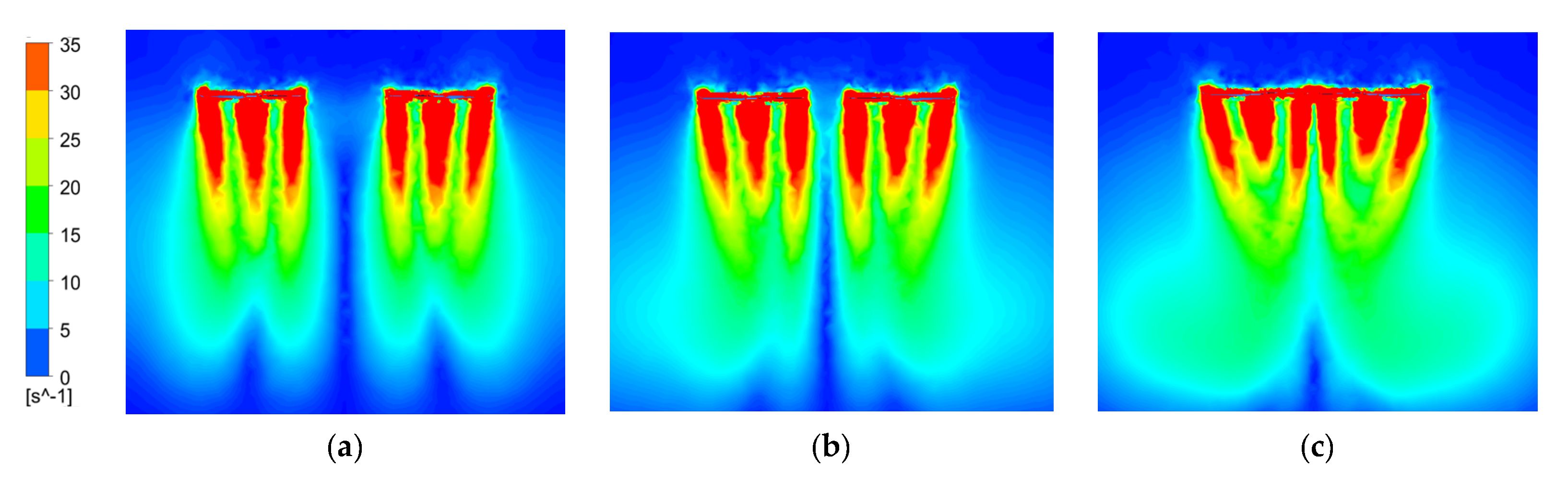
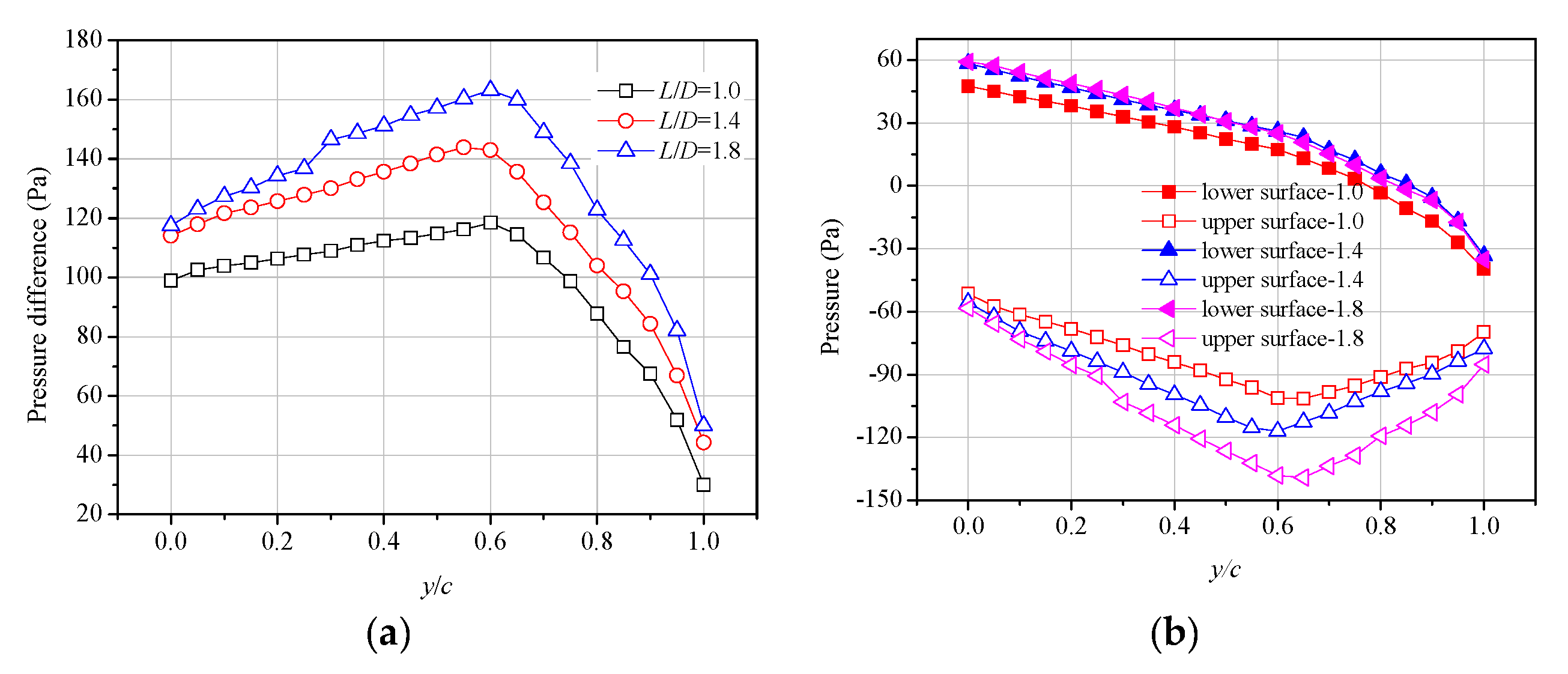
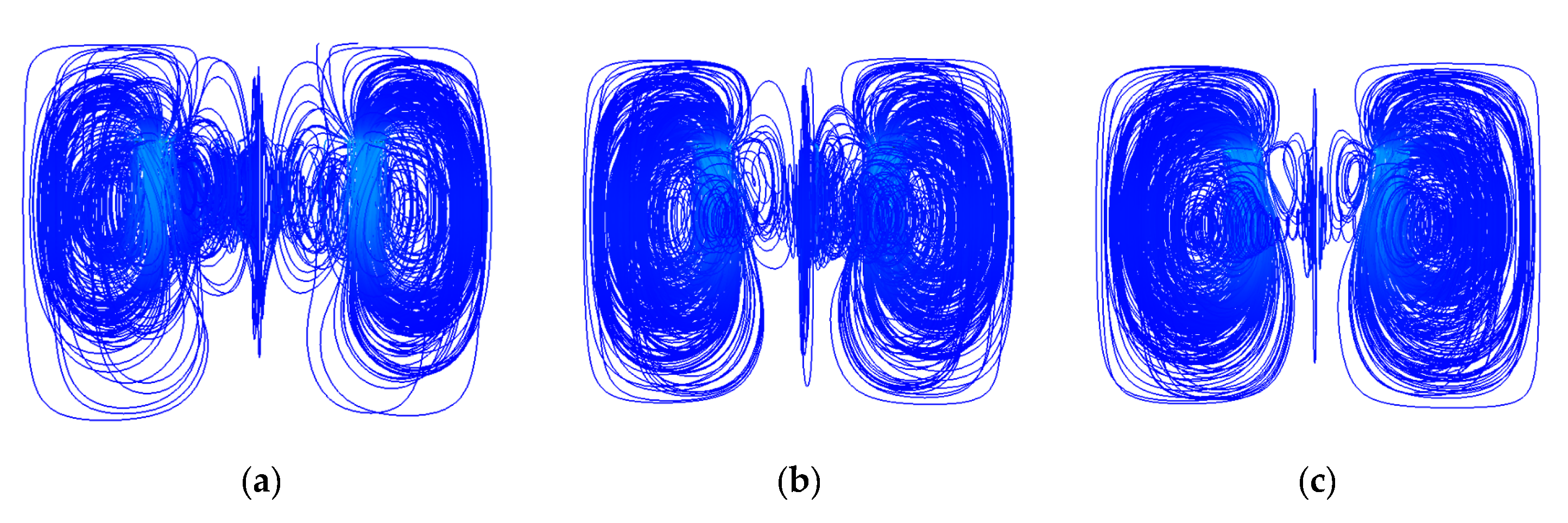
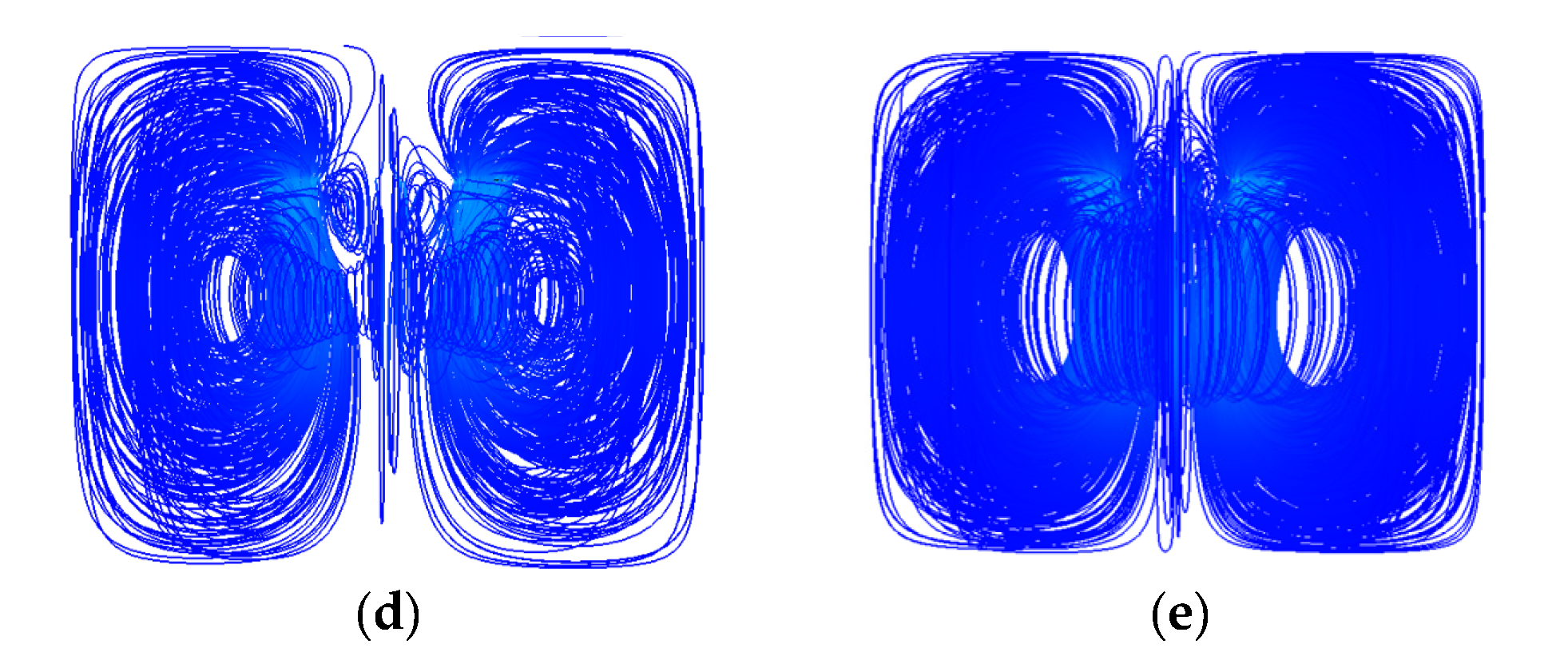
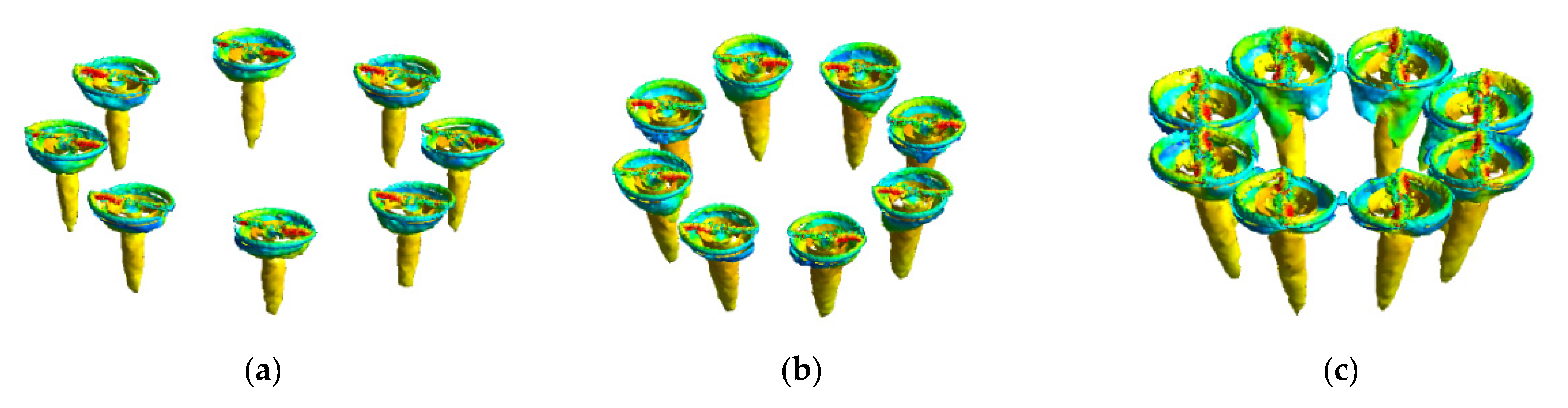
- The numerical simulation results at Retip = 0.79 × 105 show that the wake of an octorotor and the vortices of wake attract each other. Moreover, the attraction becomes more obvious as the rotor spacing decreases, which may adversely affect the aerodynamic performance of the rotor. A decrease in rotor spacing will also affect the pressure difference between the upper and lower surfaces of the rotor tips. When the rotor spacing is too small, the pressure difference is sharply reduced, thus affecting the thrust generated. Future work should attempt to obtain an aerodynamic model that considers rotor interference to amend the conventional control theory with application in an octorotor with tilted rotors or wind disturbance.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lichota, P.; Szulczyk, J. Output Error Method for Tiltrotor Unstable in Hover. Arch. Mech. Eng. 2017, 64. [Google Scholar] [CrossRef] [Green Version]
- Mettler, B.; Tischler, M.; Kanade, T.M.; Kanade, T. System Identification of Small-Size Unmanned Helicopter Dynamics. In Proceedings of the 55th Annual Forum of the American Helicopter Society, Montreal, QC, Canada, 25–27 May 1999; pp. 1706–1717. [Google Scholar]
- Hrishikeshavan, V.; Benedict, M.; Chopra, I.H.; Chopra, I. Identification of Flight Dynamics of a Cylcocopter Micro Air Vehicle in Hover. J. Aircr. 2015, 52, 116–129. [Google Scholar] [CrossRef]
- Zhang, S.; Yang, B.; Xie, H.; Song, M. Applications of an Improved Aerodynamic Optimization Method on a Low Reynolds Number Cascade. Processes 2020, 8, 1150. [Google Scholar] [CrossRef]
- Bohorquez, F.; Pines, D. Hover Performance of Rotor Blades at Low Reynolds Numbers for Rotary Wing Micro Air Vehicles. In Proceedings of the 21st AIAA Applied Aerodynamics Conference, Orlando, FL, USA, 23–26 June 2003. [Google Scholar]
- Bohorquez, F.; Samuel, P.; Sirohi, J.; Pines, D.; Rudd, L.; Perel, R. Design, Analysis and Hover Performance of a Rotary Wing Micro Air Vehicle. J. Am. Helicopter Soc. 2003, 48, 80–90. [Google Scholar] [CrossRef] [Green Version]
- Bohorquez, F.; Pines, D.; Samuel, P.D. Small Rotor Design Optimization Using Blade Element Momentum Theory and Hover Tests. J. Aircr. 2010, 47, 268–283. [Google Scholar] [CrossRef]
- Ramasamy, M.; Johnson, B.; Leishman, J.G. Understanding the Aerodynamic Efficiency of a Hovering Micro-Rotor. J. Am. Helicopter Soc. 2008, 53, 412–428. [Google Scholar] [CrossRef]
- Lakshminarayan, K.V.; Baeder, J.D. High-Resolution Computational Investigation of Trimmed Coaxial Rotor Aerodynamics in Hover. J. Am. Helicopter Soc. 2009, 54, 42008. [Google Scholar] [CrossRef]
- Syal, M.; Leishman, G.J. Aerodynamic Optimization Study of a Coaxial Rotor in Hovering Flight. J. Am. Helicopter Soc. 2012, 57, 1–15. [Google Scholar] [CrossRef]
- Yoon, S.; Chaderjian, N.; Pulliam, H.T.; Holst, T. Effect of Turbulence Modeling on Hovering Rotor Flows. In Proceedings of the 45th AIAA Fluid Dynamics Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar]
- Diaz, V.P.; Yoon, S. High-Fidelity Computational Aerodynamics of Multi-Rotor Unmanned Aerial Vehicles. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Yoon, S.; Lee, C.H.; Pulliam, H.T. Computational Analysis of Multi-Rotor Flows. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CL, USA, 4–8 January 2016. [Google Scholar]
- Henricks, Q.; Wang, Z.; Zhuang, M.H.; Zhuang, M. Small-Scale Rotor Design Variables and Their Effects On Aerodynamic and Aeroacoustic Performance of a Hovering Rotor. J. Fluids Eng. 2020, 142. [Google Scholar] [CrossRef]
- Wang, Z.; Henricks, Q.; Zhuang, M.; Pandey, A.; Sutkowy, M.; Harter, B.; McCrink, M.; Gregory, J. Impact of Rotor–Airframe Orientation on the Aerodynamic and Aeroacoustic Characteristics of Small Unmanned Aerial Systems. Drones 2019, 3, 56. [Google Scholar] [CrossRef] [Green Version]
- Shukla, D.; Hiremath, N.; Patel, S.; Komerath, N. Aerodynamic Interactions Study on Low-Re Coaxial and Quad-Rotor Configurations. In Proceedings of the ASME 2017 International Mechanical Engineering Congress and Exposition, Tampa, FL, USA, 3–9 November 2017. [Google Scholar]
- Shukla, D.; Komerath, N. Low Reynolds number multirotor aerodynamic wake interactions. Exp. Fluids 2019, 60. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, W.; Shi, Y.; Cai, M.; Li, F. Study on the effect of tilting-rotor structure on the lift of small tilt rotor aircraft. In Proceedings of the 2017 2nd International Conference on Advanced Robotics and Mechatronics, Hefei, China, 27–31 August 2017; pp. 380–385. [Google Scholar]
- Yang, S.; Liu, X.; Bingtai, C.; Li, S.; Zheng, Y. CFD Models and Verification of the Downwash Airflow of an Eight-rotor UAV. In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019. [Google Scholar]
- Lei, Y.; Wang, H. Aerodynamic Optimization of a Micro Quadrotor Aircraft with Different Rotor Spacings in Hover. Appl. Sci. 2020, 10, 1272. [Google Scholar] [CrossRef] [Green Version]
- Lei, Y.; Wang, J. Aerodynamic Performance of Quadrotor UAV with Non-Planar Rotors. Appl. Sci. 2019, 9, 2779. [Google Scholar] [CrossRef] [Green Version]
- Lei, Y.; Cheng, M. Aerodynamic performance of a Hex-rotor unmanned aerial vehicle with different rotor spacing. Meas. Control 2020, 53, 002029401990131. [Google Scholar] [CrossRef] [Green Version]
- Johnson, W. Helicopter Theory; Courier Dover Publications: New York, NY, USA, 1994. [Google Scholar]
- Lichota, P. Inclusion of the D-optimality in multisine manoeuvre design for aircraft parameter estimation. J. Theor. Appl. Mech. 2016, 54, 87–98. [Google Scholar] [CrossRef] [Green Version]
- Tischler, M.B.; Remple, R.K. Aircraft and Rotorcraft System Identification, 2nd ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2012. [Google Scholar]
- Jategaonkar, R.V. Flight Vehicle System Identification: A Time Domain Methodology, 2nd ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2015. [Google Scholar]
- Kline, S.; McClintock, F. Describing Uncertainties in Single-Sample Experiments. J. Mech. Eng. 1953, 75, 3–8. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chord (mm) | Radius (m) | Solidity | Pitch (m) | Twist |
|---|---|---|---|---|
| 28 | 0.2 | 0.09 | 0.157 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, Y.; Huang, Y.; Wang, H. Aerodynamic Performance of an Octorotor SUAV with Different Rotor Spacing in Hover. Processes 2020, 8, 1364. https://doi.org/10.3390/pr8111364
Lei Y, Huang Y, Wang H. Aerodynamic Performance of an Octorotor SUAV with Different Rotor Spacing in Hover. Processes. 2020; 8(11):1364. https://doi.org/10.3390/pr8111364
Chicago/Turabian StyleLei, Yao, Yuhui Huang, and Hengda Wang. 2020. "Aerodynamic Performance of an Octorotor SUAV with Different Rotor Spacing in Hover" Processes 8, no. 11: 1364. https://doi.org/10.3390/pr8111364
APA StyleLei, Y., Huang, Y., & Wang, H. (2020). Aerodynamic Performance of an Octorotor SUAV with Different Rotor Spacing in Hover. Processes, 8(11), 1364. https://doi.org/10.3390/pr8111364