Gray-box Soft Sensors in Process Industry: Current Practice, and Future Prospects in Era of Big Data



Abstract
:1. Introduction
2. Fundamentals of Soft Sensors
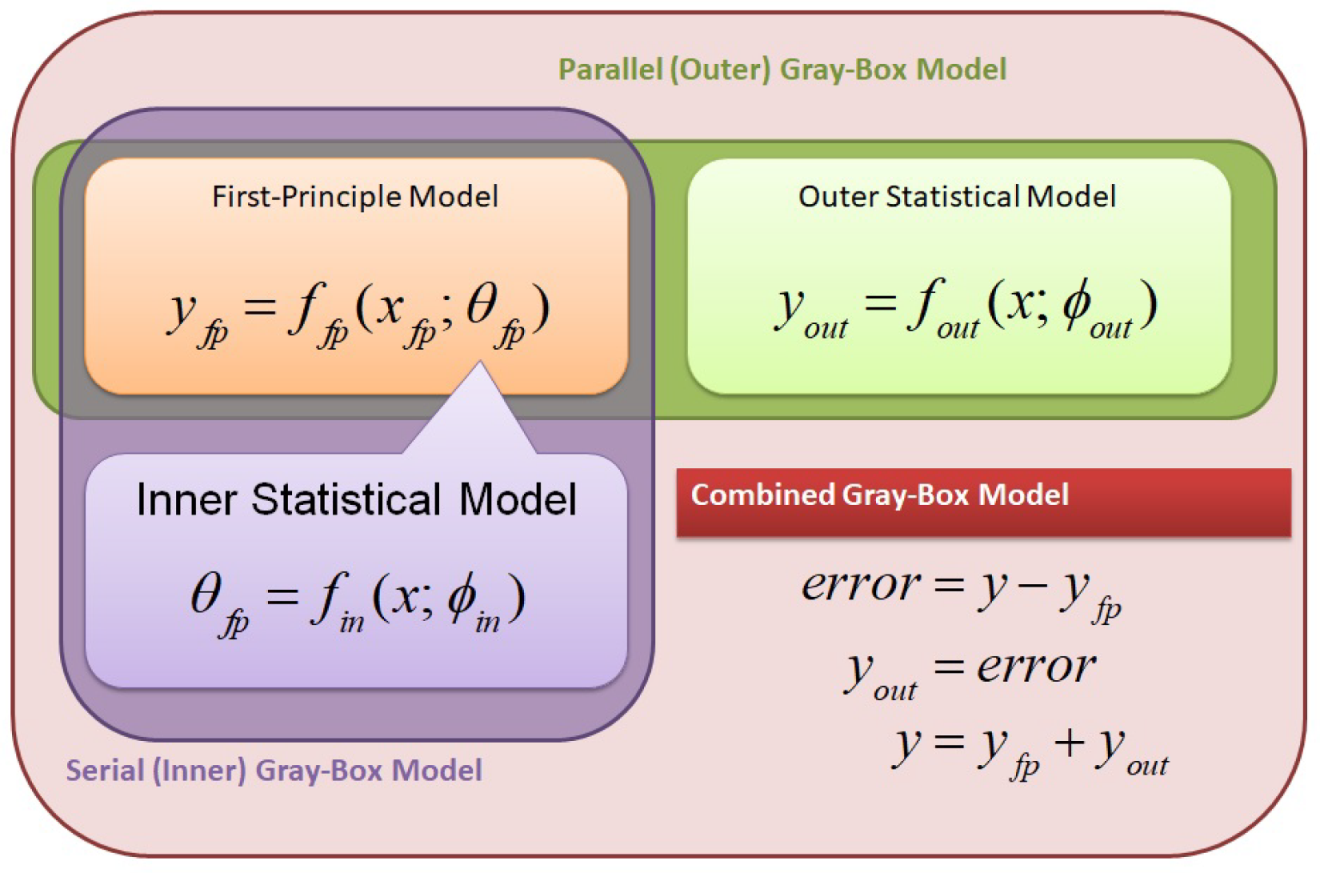
3. Types of GB Models
4. Methodology
5. Current Practice in Process Industry
5.1. Iron and Steelmaking
5.2. Food Processing
5.3. Chemical, Biochemical, and Pharmaceutical
5.4. Power Plants
5.5. Oil and Gas Processing
5.6. Water Treatment
5.7. Material Processing and Energy Materials
5.8. Industrial Robot
5.9. Miscellaneous
5.9.1. Reactive Systems
5.9.2. Heat Treatment Processes
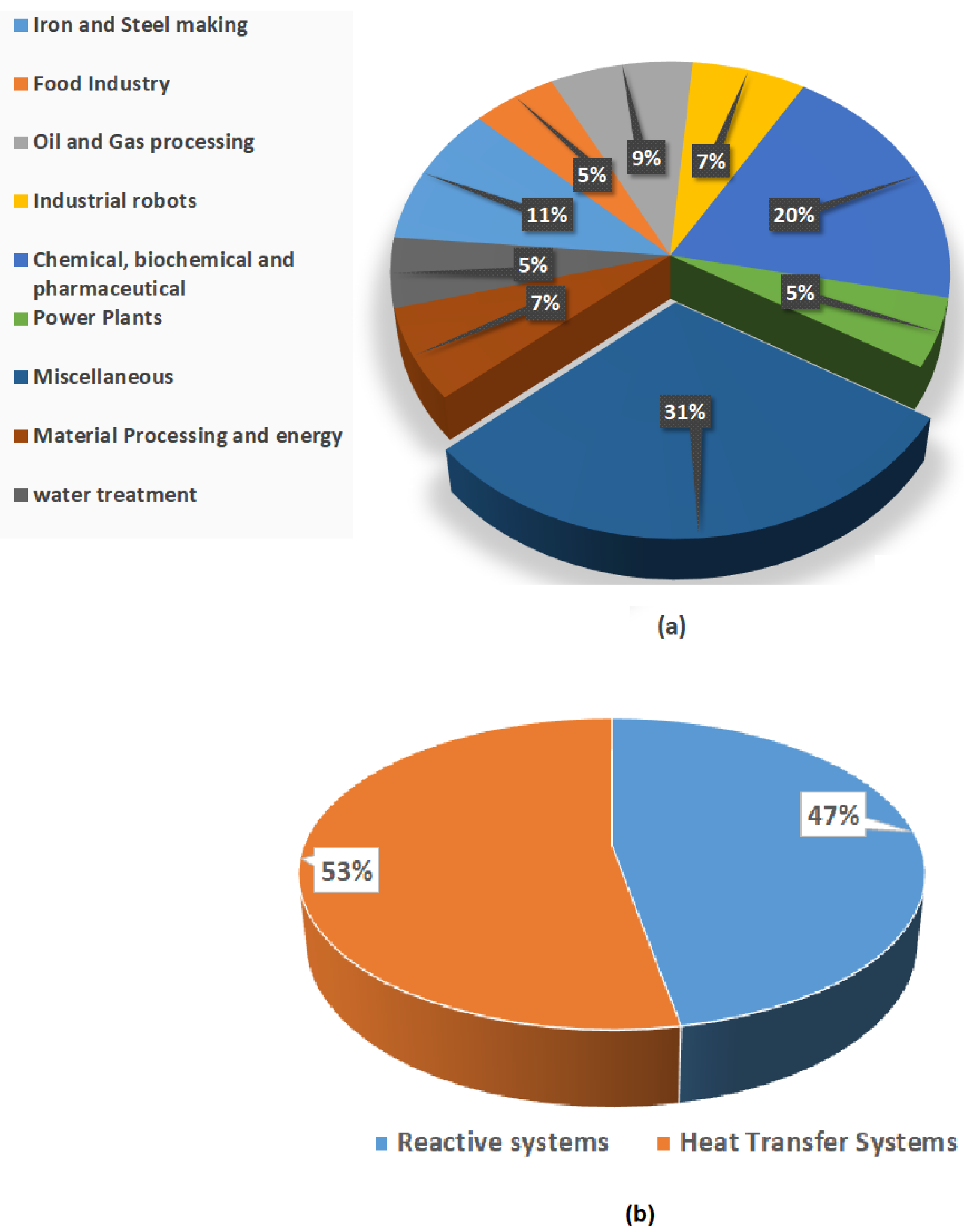
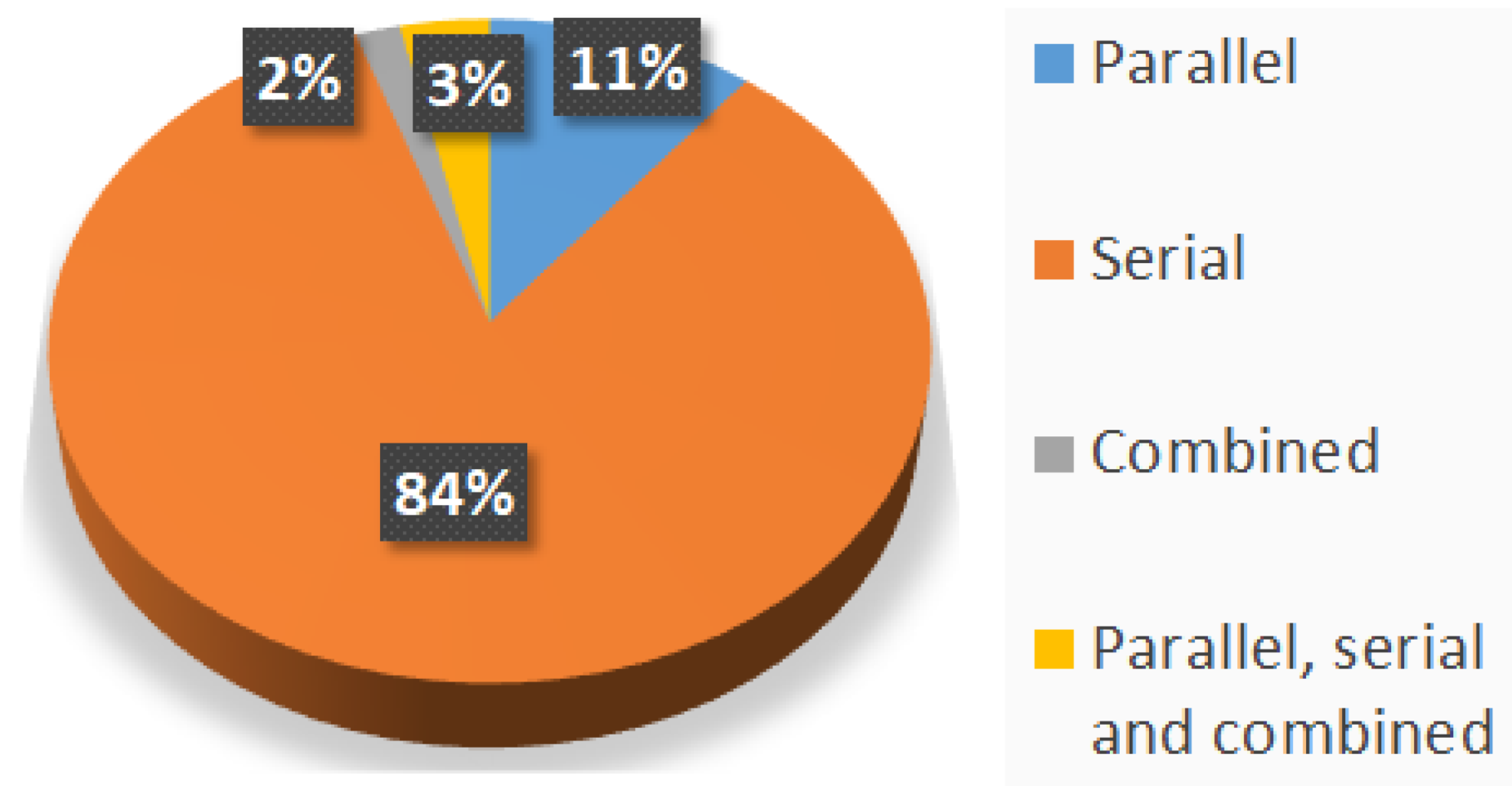
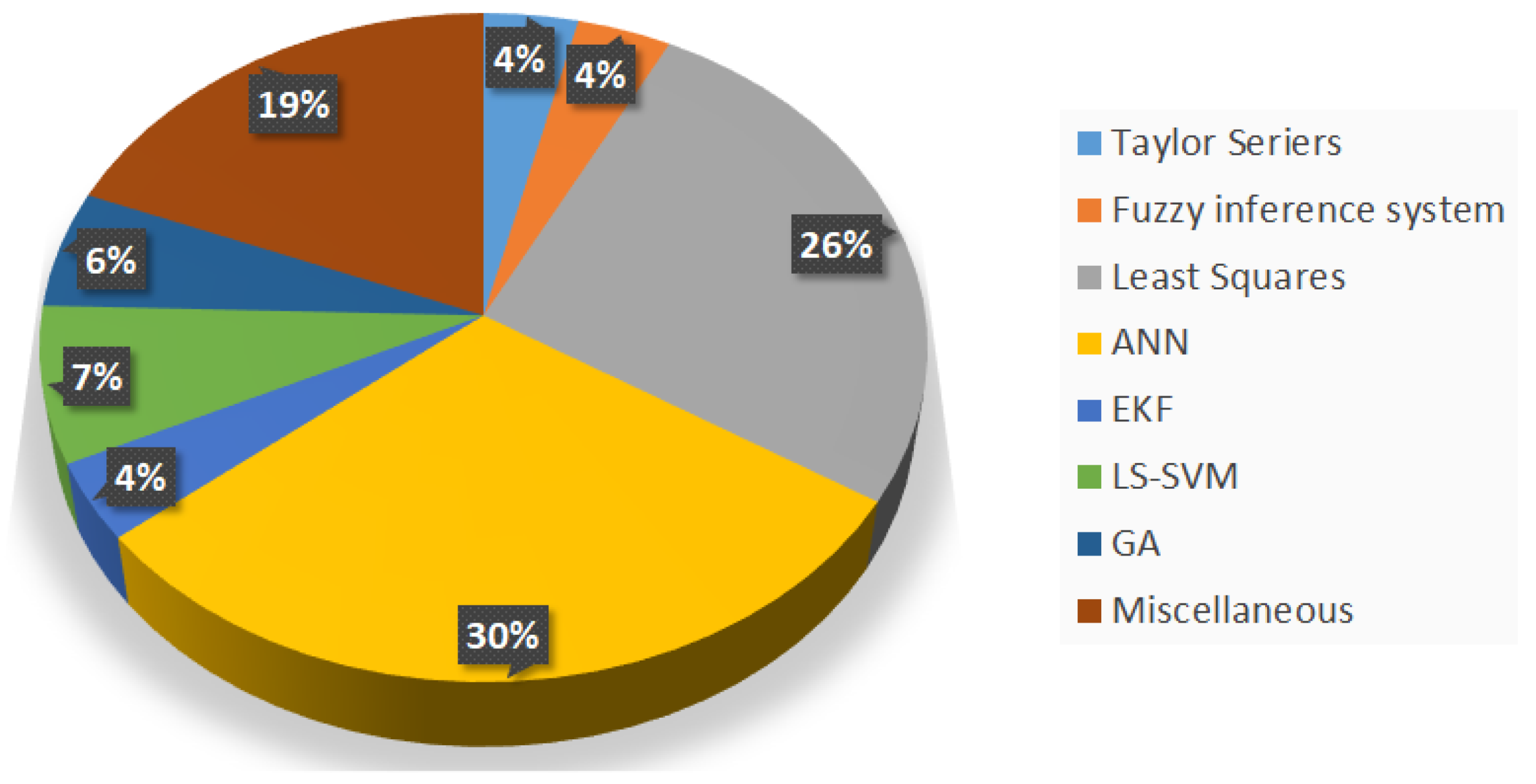
5.10. Application Summary
5.11. Prospects and Challenges in Industry 4.0
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ALAMO | Automatic learning of algebraic models |
| ANN | Artificial neural network |
| ARMAX | Autoregressive moving average exogenous |
| ARXIs | Auto-regressive with exogenous |
| BB | Black-box |
| CDU | Crude distillation unit |
| CSTR | Continuous stirred tank reactor |
| DR | Data reconciliation |
| EKF | Extended Kalman Filter |
| FIS | Fuzzy inference system |
| GA | Genetic algorithm |
| GB | Gray-box |
| IoT | Internet of things |
| LS | Least squares |
| LS-SVM | Least squares support vector machine |
| MF | Membership function |
| MLE | Maximum likelihood estimation |
| MLSSVM | Multi-I/O least squares support vector machine |
| MPC | Model for predictive control |
| MTT | Manufacturing technology testbed |
| MWD | Molecular weight distribution |
| OPFNN | Orthogonal polynomial feed forward neural network |
| PCA | Principle component analysis |
| PLS | Partial least squares |
| PV | Photovoltaic |
| RF | Random forests |
| RNN | Recurrent neural network |
| RTO | Real time optimization |
| SB | Scale breaker |
| SCR | Selective catalytic reduction |
| SDEs | Stochastic differential equations |
| SDO | Simulink design optimization tool |
| SMR | Steam methane reforming |
| SPA | Statistics pattern analysis |
| SPSA | Simultaneous perturbation stochastic approximation |
| SSM | State space model |
| SVM | Support vector machine |
| TSE | Twin screw extruder |
| WB | White-box |
| WLLS | Weighted logarithmic least squares |
| WRRFs | Water resource recovery facilities |
References
- Oztemel, E.; Gursev, S. Literature review of Industry 4.0 and related technologies. J. Intell. Manuf. 2020, 31, 127–182. [Google Scholar] [CrossRef]
- Jiang, Y.; Yin, S.; Kaynak, O. Data-driven monitoring and safety control of industrial cyber-physical systems: Basics and beyond. IEEE Access 2018, 6, 47374–47384. [Google Scholar] [CrossRef]
- Joly, M.; Odloak, D.; Miyake, M.Y.; Menezes, B.C.; Kelly, J.D. Refinery production scheduling toward Industry 4.0. Front. Manag. Eng. 2017, 37, 1877–1882. [Google Scholar] [CrossRef]
- Khan, A.; Turowski, K. A Perspective on Industry 4.0: From Challenges to Opportunities in Production Systems. In Proceedings of the IoTBD, Rome, Italy, 23–25 April 2016; pp. 441–448. [Google Scholar]
- Candanedo, I.S.; Nieves, E.H.; González, S.R.; Martín, M.T.S.; Briones, A.G. Machine learning predictive model for industry 4.0. In International Conference on Knowledge Management in Organizations; Springer: Berlin, Germany, 2018; pp. 501–510. [Google Scholar]
- Zheng, P.; Wang, H.; Sang, Z.; Zhong, R.Y.; Liu, Y.; Liu, C.; Mubarok, K.; Yu, S.; Xu, X. Smart manufacturing systems for Industry 4.0: Conceptual framework, scenarios, and future perspectives. Front. Mech. Eng. 2018, 13, 137–150. [Google Scholar] [CrossRef]
- Rüßmann, M.; Lorenz, M.; Gerbert, P.; Waldner, M.; Justus, J.; Engel, P.; Harnisch, M. Industry 4.0: The future of productivity and growth in manufacturing industries. Boston Consult. Group 2015, 9, 54–89. [Google Scholar]
- Weyrich, M.; Ebert, C. Reference architectures for the internet of things. IEEE Softw. 2016, 33, 112–116. [Google Scholar] [CrossRef]
- Schütze, A.; Helwig, N.; Schneider, T. Sensors 4.0–smart sensors and measurement technology enable Industry 4.0. J. Sensors Sens. Syst. 2018, 7, 359–371. [Google Scholar] [CrossRef]
- Tameh, T.A.; Sawan, M.; Kashyap, R. Smart integrated optical rotation sensor incorporating a fly-by-wire control system. IEEE Trans. Ind. Electron. 2017, 65, 6505–6514. [Google Scholar] [CrossRef]
- Martinez-Figueroa, G.D.J.; Morinigo-Sotelo, D.; Zorita-Lamadrid, A.L.; Morales-Velazquez, L.; Romero-Troncoso, R.D.J. Fpga-based smart sensor for detection and classification of power quality disturbances using higher order statistics. IEEE Access 2017, 5, 14259–14274. [Google Scholar] [CrossRef]
- Cloete, N.A.; Malekian, R.; Nair, L. Design of smart sensors for real-time water quality monitoring. IEEE Access 2016, 4, 3975–3990. [Google Scholar] [CrossRef]
- Maciá-Pérez, F.; Mora-Gimeno, F.J.; Marcos-Jorquera, D.; Gil-Martínez-Abarca, J.A.; Ramos-Morillo, H.; Lorenzo-Fonseca, I. Network intrusion detection system embedded on a smart sensor. IEEE Trans. Ind. Electron. 2010, 58, 722–732. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Zhang, S.; Yan, Y.; Wang, L.; Qian, X.; Yang, L. A smart electrostatic sensor for online condition monitoring of power transmission belts. IEEE Trans. Ind. Electron. 2017, 64, 7313–7322. [Google Scholar] [CrossRef]
- Alahi, M.E.E.; Xie, L.; Mukhopadhyay, S.; Burkitt, L. A temperature compensated smart nitrate-sensor for agricultural industry. IEEE Trans. Ind. Electron. 2017, 64, 7333–7341. [Google Scholar] [CrossRef]
- Lin, F.; Wang, A.; Zhuang, Y.; Tomita, M.R.; Xu, W. Smart insole: A wearable sensor device for unobtrusive gait monitoring in daily life. IEEE Trans. Ind. Inform. 2016, 12, 2281–2291. [Google Scholar] [CrossRef]
- Shah, D.; Wang, J.; He, Q.P. An Internet-of-things Enabled Smart Manufacturing Testbed. IFAC-PapersOnLine 2019, 52, 562–567. [Google Scholar] [CrossRef]
- He, Q.P.; Wang, J.; Shah, D.; Vahdat, N. Statistical process monitoring for IoT-Enabled cybermanufacturing: opportunities and challenges. IFAC-PapersOnLine 2017, 50, 14946–14951. [Google Scholar] [CrossRef]
- Syafrudin, M.; Alfian, G.; Fitriyani, N.; Rhee, J. Performance Analysis of IoT-Based Sensor, Big Data Processing, and Machine Learning Model for Real-Time Monitoring System in Automotive Manufacturing. Sensors 2018, 18, 2946. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Klusch, M.; Meshram, A.; Schuetze, A.; Helwig, N. iCM-Hydraulic: Semantics-empowered condition monitoring of hydraulic machines. In Proceedings of the 11th International Conference on Semantic Systems, Vienna, Austria, 15–17 September 2015; pp. 81–88. [Google Scholar]
- He, Q.P.; Wang, J. Statistical process monitoring as a big data analytics tool for smart manufacturing. J. Process Control 2018, 67, 35–43. [Google Scholar] [CrossRef]
- Hodas, N.O.; Lerman, K. The simple rules of social contagion. Sci. Rep. 2014, 4, 4343. [Google Scholar] [CrossRef] [Green Version]
- Shvachko, K.; Kuang, H.; Radia, S.; Chansler, R. The hadoop distributed file system. In Proceedings of the MSST, Incline Village, NV, USA, 3–7 May 2010; Volume 10, pp. 1–10. [Google Scholar]
- Bengio, Y.; Courville, A.; Vincent, P. Representation learning: A review and new perspectives. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1798–1828. [Google Scholar] [CrossRef]
- Anandkumar, A.; Hsu, D.J.; Janzamin, M.; Kakade, S.M. When are overcomplete topic models identifiable? uniqueness of tensor tucker decompositions with structured sparsity. In Advances in Neural Information Processing Systems 26; Curran Associates, Inc.: Red Hook, NY, USA, 2013; pp. 1986–1994. [Google Scholar]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Tracking-learning-detection. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 34, 1409–1422. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scott, S.L.; Blocker, A.W.; Bonassi, F.V.; Chipman, H.A.; George, E.I.; McCulloch, R.E. Bayes and big data: The consensus Monte Carlo algorithm. Int. J. Manag. Sci. Eng. Manag. 2016, 11, 78–88. [Google Scholar] [CrossRef] [Green Version]
- Kadlec, P.; Gabrys, B.; Strandt, S. Data-driven soft sensors in the process industry. Comput. Chem. Eng. 2009, 33, 795–814. [Google Scholar] [CrossRef] [Green Version]
- Kano, M.; Fujiwara, K. Virtual sensing technology in process industries: Trends and challenges revealed by recent industrial applications. J. Chem. Eng. Jpn. 2013, 46, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Kaneko, H.; Arakawa, M.; Funatsu, K. Development of a new soft sensor method using independent component analysis and partial least squares. AIChE J. 2009, 55, 87–98. [Google Scholar] [CrossRef]
- Sun, K.; Liu, J.; Kang, J.L.; Jang, S.S.; Wong, D.S.H.; Chen, D.S. Soft Sensor Development with Nonlinear Variable Selection Using Nonnegative Garrote and Artificial Neural Network. In Computer Aided Chemical Engineering; Elsevier: Amsterdam, The Netherlands, 2014; Volume 33, pp. 883–888. [Google Scholar]
- Sohlberg, B. Hybrid grey box modelling of a pickling process. Control Eng. Pract. 2005, 13, 1093–1102. [Google Scholar] [CrossRef]
- Barrios, J.A.; Cavazos, A.; Leduc, L.; Ramírez, J. Fuzzy and fuzzy grey-box modelling for entry temperature prediction in a hot strip mill. Mater. Manuf. Process. 2011, 26, 66–77. [Google Scholar] [CrossRef]
- Ahmad, I.; Kano, M.; Hasebe, S.; Kitada, H.; Murata, N. Gray-box modeling for prediction and control of molten steel temperature in tundish. J. Process Control 2014, 24, 375–382. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, I.; Kano, M.; Hasebe, S.; Kitada, H.; Murata, N. Prediction of molten steel temperature in steel making process with uncertainty by integrating gray-box model and bootstrap filter. J. Chem. Eng. Jpn. 2014, 47, 827–834. [Google Scholar] [CrossRef] [Green Version]
- Barrios, J.A.; Torres-Alvarado, M.; Cavazos, A.; Leduc, L. Neural and Neural Gray-Box modeling for entry temperature prediction in a hot strip mill. J. Mater. Eng. Perform. 2011, 20, 1128–1139. [Google Scholar] [CrossRef]
- Cubillos, F.A.; Vyhmeister, E.; Acuña, G.; Alvarez, P.I. Rotary dryer control using a grey-box neural model scheme. Dry. Technol. 2011, 29, 1820–1827. [Google Scholar] [CrossRef]
- Vieira, G.N.A.; Freire, F.B.; Freire, J.T. Control of the moisture content of milk powder produced in a spouted bed dryer using a grey-box inferential controller. Dry. Technol. 2015, 33, 1920–1928. [Google Scholar] [CrossRef]
- Saltık, M.B.; Özkan, L.; Jacobs, M.; van der Padt, A. Dynamic modeling of ultrafiltration membranes for whey separation processes. Comput. Chem. Eng. 2017, 99, 280–295. [Google Scholar] [CrossRef]
- Møller, J.K.; Goranović, G.; Poulsen, N.K.; Madsen, H. Physical-stochastic (greybox) modeling of slugging. Ifac-Papersonline 2018, 51, 197–202. [Google Scholar] [CrossRef]
- Onel, O.; Niziolek, A.M.; Butcher, H.; Wilhite, B.A.; Floudas, C.A. Multi-scale approaches for gas-to-liquids process intensification: CFD modeling, process synthesis, and global optimization. Comput. Chem. Eng. 2017, 105, 276–296. [Google Scholar] [CrossRef]
- Bram, M.V.; Hansen, L.; Hansen, D.S.; Yang, Z. Grey-Box modeling of an offshore deoiling hydrocyclone system. In Proceedings of the 2017 IEEE Conference on Control Technology and Applications (CCTA), Mauna Lani, HI, USA, 27–30 August 2017; pp. 94–98. [Google Scholar]
- Lotfalipour, M.R.; Falahi, M.A.; Bastam, M. Prediction of CO2 emissions in Iran using grey and ARIMA models. Int. J. Energy Econ. Policy 2013, 3, 229–237. [Google Scholar]
- Durrani, M.; Ahmad, I.; Kano, M.; Hasebe, S. An Artificial Intelligence Method for Energy Efficient Operation of Crude Distillation Units under Uncertain Feed Composition. Energies 2018, 11, 2993. [Google Scholar] [CrossRef] [Green Version]
- Prada Moraga, C.D.; Hose, D.; Gutierrez, G.; Pitarch, J.L. Developing Grey-Box Dynamic Process Models. IFAC-PapersOnLine 2013, 51, 523–528. [Google Scholar] [CrossRef]
- Wang, B.; Yu, M.; Zhu, X.; Zhu, L.; Jiang, Z. A Robust Decoupling Control Method Based on Artificial Bee Colony-Multiple Least Squares Support Vector Machine Inversion for Marine Alkaline Protease MP Fermentation Process. IEEE Access 2019, 7, 32206–32216. [Google Scholar] [CrossRef]
- Niu, D.; Jia, M.; Wang, F.; He, D. Optimization of nosiheptide fed-batch fermentation process based on hybrid model. Ind. Eng. Chem. Res. 2013, 52, 3373–3380. [Google Scholar] [CrossRef]
- Johansen, T.A.; Foss, B.A. Representing and learning unmodeled dynamics with neural network memories. In Proceedings of the American Control Conference, Chicago, IL, USA, 24–26 June 1992; pp. 3037–3043. [Google Scholar]
- Liu, X.; Li, K.; McAfee, M.; Nguyen, B.K.; McNally, G.M. Dynamic gray-box modeling for on-line monitoring of polymer extrusion viscosity. Polym. Eng. Sci. 2012, 52, 1332–1341. [Google Scholar] [CrossRef] [Green Version]
- Everett, S.E.; Dubay, R. A sub-space artificial neural network for mold cooling in injection molding. Expert Syst. Appl. 2017, 79, 358–371. [Google Scholar] [CrossRef]
- Zahedi, G.; Azizia, S.; Hatamia, T.; Sheikhattar, L. Gray box modeling of supercritical nimbin extraction from neem seeds using methanol as co-solvent. Open Chem. Eng. J. 2010, 4, 21–30. [Google Scholar] [CrossRef] [Green Version]
- Cubillos, F.; Acuña, G.; Lima, E. Real-time process optimization based on grey-box neural models. Braz. J. Chem. Eng. 2007, 24, 433–443. [Google Scholar] [CrossRef] [Green Version]
- Pitarch, J.L.; Sala, A.; de Prada, C. A Systematic Grey-Box Modeling Methodology via Data Reconciliation and SOS Constrained Regression. Processes 2019, 7, 170. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Yu, S.; Mei, C.; Ding, Y. A novel soft sensor model based on artificial neural network in the fermentation process. Afr. J. Biotechnol. 2011, 10, 19780–19787. [Google Scholar]
- Zhao, H.; Shen, J.; Li, Y.; Bentsman, J. Coal-fired utility boiler modelling for advanced economical low-NOx combustion controller design. Control Eng. Pract. 2017, 58, 127–141. [Google Scholar] [CrossRef]
- Arahal, M.R.; Cirre, C.M.; Berenguel, M. Serial grey-box model of a stratified thermal tank for hierarchical control of a solar plant. Sol. Energy 2008, 82, 441–451. [Google Scholar] [CrossRef]
- Barszcz, T.; Czop, P. Estimation of feedwater heater parameters based on a grey-box approach. Int. J. Appl. Math. Comput. Sci. 2011, 21, 703–715. [Google Scholar] [CrossRef]
- Stentoft, P.A.; Guericke, D.; Munk-Nielsen, T.; Mikkelsen, P.S.; Madsen, H.; Vezzaro, L.; Møller, J.K. Model Predictive Control of Stochastic Wastewater Treatment Process for Smart Power, Cost-Effective Aeration. In Proceedings of the 12th IFAC Symposium on Dynamics and Control of Process Systems, Florianópolis, Brazil, 23–26 April 2019. [Google Scholar]
- Stentoft, P.A.; Munk-Nielsen, T.; Vezzaro, L.; Madsen, H.; Mikkelsen, P.S.; Møller, J.K. Towards model predictive control: Online predictions of ammonium and nitrate removal by using a stochastic ASM. Water Sci. Technol. 2019, 79, 51–62. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dragoi, E.N.; Horoba, C.A.; Mamaliga, I.; Curteanu, S. Grey and black-box modelling based on neural networks and artificial immune systems applied to solid dissolution by rotating disc method. Chem. Eng. Process. Process Intensif. 2014, 82, 173–184. [Google Scholar] [CrossRef]
- Li, D.C.; Yeh, C.W.; Chen, C.C.; Wang, Y.T. A new grey prediction model for the return material authorization process in the TFT-LCD industry. Int. J. Adv. Manuf. Technol. 2018, 96, 2149–2160. [Google Scholar] [CrossRef]
- Rad, C.R.; Hancu, O.; Lapusan, C. Gray-box modeling and closed-loop temperature control of a thermotronic system. In Proceedings of the 11th IFToMM International Symposium on Science of Mechanisms and Machines, Braşov, Romania, 11–12 November 2013; Springer: Cham, Switzerland, 2014; pp. 197–207. [Google Scholar]
- Masoudinejad, M.; Kamat, M.; Emmerich, J.; ten Hompel, M.; Sardesai, S. A gray box modeling of a photovoltaic cell under low illumination in materials handling application. In Proceedings of the 2015 3rd International Renewable and Sustainable Energy Conference (IRSEC), Marrakech, Morocco, 10–13 December 2015; pp. 1–6. [Google Scholar]
- Liu, G.; Dass, R.; Nguang, S.K.; Partridge, A. Principles, design, and calibration for a genre of irradiation angle sensors. IEEE Trans. Ind. Electron. 2012, 60, 210–216. [Google Scholar] [CrossRef]
- Wernholt, E.; Moberg, S. Frequency-domain gray-box identification of industrial robots. IFAC Proc. Vol. 2008, 41, 15372–15380. [Google Scholar] [CrossRef] [Green Version]
- Ayala, H.V.H.; Habineza, D.; Rakotondrabe, M.; Klein, C.E.; Coelho, L.S. Nonlinear black-box system identification through neural networks of a hysteretic piezoelectric robotic micromanipulator. IFAC-PapersOnLine 2015, 48, 409–414. [Google Scholar] [CrossRef]
- Wernholt, E.; Moberg, S. Nonlinear gray-box identification using local models applied to industrial robots. Automatica 2011, 47, 650–660. [Google Scholar] [CrossRef] [Green Version]
- Zendehboudi, S.; Rezaei, N.; Lohi, A. Applications of hybrid models in chemical, petroleum, and energy systems: A systematic review. Appl. Energy 2018, 228, 2539–2566. [Google Scholar] [CrossRef]
- Wu, Z.; Li, J.; Cai, M.; Lin, Y.; Zhang, W. On membership of black-box or white-box of artificial neural network models. In Proceedings of the 12016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; pp. 1400–1404. [Google Scholar]
- Hangos, K.M.; Cameron, I.T. Process modelling and model analysis; Academic Press: London, UK, 2001; Volume 4. [Google Scholar]
- Jin, C.; Cusatis, G. New Frontiers in Oil and Gas Exploration; Springer: Berlin, Germany, 2016. [Google Scholar]
- Nelles, O. Nonlinear System Identification: From Classical Approaches to Neural Networks and Fuzzy Models; Springer Science & Business Media: Berin/Hedelberg, Germany, 2013. [Google Scholar]
- Grossmann, I.E.; Westerberg, A.W. Research challenges in process systems engineering. AIChE J. 2000, 46, 1700–1703. [Google Scholar] [CrossRef]
- Chaves, I.D.G.; López, J.R.G.; Zapata, J.L.G.; Robayo, A.L.; Niño, G.R. Process Analysis and Simulation in Chemical Engineering; Springer: Berlin, Germany, 2016. [Google Scholar]
- Bequette, B.W. Nonlinear control of chemical processes: A review. Ind. Eng. Chem. Res. 1991, 30, 1391–1413. [Google Scholar] [CrossRef]
- Guay, M.; McLellan, P.; Bacon, D. Measurement of nonlinearity in chemical process control systems: The steady state map. Can. J. Chem. Eng. 1995, 73, 868–882. [Google Scholar] [CrossRef]
- Krasławski, A. Review of applications of various types of uncertainty in chemical engineering. Chem. Eng. Process. Process Intensif. 1989, 26, 185–191. [Google Scholar] [CrossRef]
- Ahmad, I.; Kano, M.; Hasebe, S. Dimensions and analysis of uncertainty in industrial modeling process. J. Chem. Eng. Jpn. 2018, 51, 533–543. [Google Scholar] [CrossRef]
- Li, J.; Kwauk, M. Exploring complex systems in chemical engineering—the multi-scale methodology. Chem. Eng. Sci. 2003, 58, 521–535. [Google Scholar] [CrossRef]
- Li, G.; Rosenthal, C.; Rabitz, H. High dimensional model representations. J. Phys. Chem. A 2001, 105, 7765–7777. [Google Scholar] [CrossRef]
- Michiels, W.; Niculescu, S.I. Stability, Control, and Computation for Time-Delay Systems: An Eigenvalue-Based Approach; Siam: Philadelphia, PA, USA , 2014; Volume 27. [Google Scholar]
- Cherkassky, V.; Mulier, F.M. Learning from Data: Concepts, Theory, and Methods; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Mokhatab, S.; Poe, W.A. Handbook of Natural Gas Transmission and Processing; Gulf professional publishing: Houston, TX, USA, 2012. [Google Scholar]
- Jank, B. Instrumentation, Control and Automation of Water and Wastewater Treatment and Transport Systems 1993; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Sjöberg, J.; Zhang, Q.; Ljung, L.; Benveniste, A.; Delyon, B.; Glorennec, P.Y.; Hjalmarsson, H.; Juditsky, A. Nonlinear black-box modeling in system identification: A unified overview. Automatica 1995, 31, 1691–1724. [Google Scholar] [CrossRef] [Green Version]
- Suykens, J.A.; Vandewalle, J.P. Nonlinear Modeling: Advanced Black-Box Techniques; Springer Science & Business Media: Berin/Hedelberg, Germany, 2012. [Google Scholar]
- Bohlin, T.; Graebe, S.F. Issues in nonlinear stochastic grey box identification. Int. J. Adapt. Control Signal Process. 1995, 9, 465–490. [Google Scholar] [CrossRef]
- Jørgensen, S.B.; Hangos, K.M. Grey box modelling for control: Qualitative models as a unifying framework. Int. J. Adapt. Control Signal Process. 1995, 9, 547–562. [Google Scholar] [CrossRef]
- Tulleken, H.J. Grey-box modelling and identification using physical knowledge and Bayesian techniques. Automatica 1993, 29, 285–308. [Google Scholar] [CrossRef]
- Bohlin, T.P. Practical Grey-Box Process Identification: Theory and Applications; Springer Science & Business Media: Berin/Hedelberg, Germany, 2006. [Google Scholar]
- Bohlin, T. Interactive system identification: Prospects and pitfalls; Springer Science & Business Media: Berin/Hedelberg, Germany, 2013. [Google Scholar]
- Okura, T.; Ahmad, I.; Kano, M.; Hasebe, S.; Kitada, H.; Murata, N. High-performance prediction of molten steel temperature in tundish through gray-box model. ISIJ Int. 2013, 53, 76–80. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; Cao, L.; Wang, J. Gray-box modeling and control of polymer molecular weight distribution using orthogonal polynomial neural networks. J. Process Control 2012, 22, 1624–1636. [Google Scholar] [CrossRef]
- Knoblach, A.; Saupe, F. LPV gray box identification of industrial robots for control. In Proceedings of the 2012 IEEE International Conference on Control Applications, Dubrovnik, Croatia, 3–5 October 2012; pp. 831–836. [Google Scholar]
- Acuña, G.; Curilem, M. Time-variant parameter estimation using a SVM Gray-Box model: Application to a CSTR Process. In Proceedings of the 3rd International Conference on Systems and Control, Algiers, Algeria, 29–31 October 2013; pp. 414–418. [Google Scholar]
- Acuña, G.; Möller, H. Indirect training of Gray-Box Models using LS-SVM and genetic algorithms. In Proceedings of the 2016 IEEE Latin American Conference on Computational Intelligence (LA-CCI), Cartagena, Colombia, 2–4 November 2016; pp. 1–5. [Google Scholar]
- Porru, G.; Aragonese, C.; Baratti, R.; Servida, A. Monitoring of a CO oxidation reactor through a grey model-based EKF observer. Chem. Eng. Sci. 2000, 55, 331–338. [Google Scholar] [CrossRef] [Green Version]
- Xiong, Q.; Jutan, A. Grey-box modelling and control of chemical processes. Chem. Eng. Sci. 2002, 57, 1027–1039. [Google Scholar] [CrossRef]
- Hourfar, F.; Salahshoor, K. Adaptive Control of CSTR Using Feedback Linearization Based on Grey-Box Modeling. In Proceedings of the IEEE International Conference on Networking, Sensing and Control, ICNSC 2008, Sanya, China, 6–8 April 2008; pp. 7–12. [Google Scholar]
- Zanardo, G.; Stadlbauer, S.; Waschl, H.; del Re, L. Grey Box Control Oriented SCR Model. In Proceedings of the 11th International Conference on Engines & Vechicles: ICE 2013, Napoli, Italy, 15–19 September 2013. [Google Scholar]
- Acuña, G.; Pinto, E. Development of a Matlab (R) Toolbox for the Design of Grey-Box Neural Models. Int. J. Comput. Commun. Control 2006, 1, 7–14. [Google Scholar] [CrossRef] [Green Version]
- Barkman, P. Grey-Box Modelling of Distributed Parameter Systems. Master’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2018. [Google Scholar]
- Pearson, R.K.; Pottmann, M. Gray-box identification of block-oriented nonlinear models. J. Process Control 2000, 10, 301–315. [Google Scholar] [CrossRef]
- Weyer, E.; Szederkényi, G.; Hangos, K. Grey box fault detection of heat exchangers. Control Eng. Pract. 2000, 8, 121–131. [Google Scholar] [CrossRef]
- Miao, Q.; You, S.; Zheng, W.; Zheng, X.; Zhang, H.; Wang, Y. A Grey-Box Dynamic Model of Plate Heat Exchangers Used in an Urban Heating System. Energies 2017, 10, 1398. [Google Scholar] [CrossRef] [Green Version]
- Cubillos, F.A.; Acuña, G. Adaptive control using a grey box neural model: An experimental application. In International Symposium on Neural Networks; Springer: Berlin, Germany, 2007; pp. 311–318. [Google Scholar]
- Farooq, A.A.; Afram, A.; Schulz, N.; Janabi-Sharifi, F. Grey-box modeling of a low pressure electric boiler for domestic hot water system. Appl. Therm. Eng. 2015, 84, 257–267. [Google Scholar] [CrossRef]
- Aprile, M.; Scoccia, R.; Toppi, T.; Motta, M. Gray-box entropy-based model of a water-source NH3-H2O gas-driven absorption heat pump. Appl. Therm. Eng. 2017, 118, 214–223. [Google Scholar] [CrossRef]
- Sossan, F.; Lakshmanan, V.; Costanzo, G.T.; Marinelli, M.; Douglass, P.J.; Bindner, H. Grey-box modelling of a household refrigeration unit using time series data in application to demand side management. Sustain. Energy Grids Netw. 2016, 5, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Petersen, L.N.; Poulsen, N.K.; Niemann, H.H.; Utzen, C.; Jørgensen, J.B. A grey-box model for spray drying plants. IFAC Proc. Vol. 2013, 46, 559–564. [Google Scholar] [CrossRef]
- De Moor, M.; Berckmans, D. Building a grey box model to model the energy and mass transfer in an imperfectly mixed fluid by using experimental data. Math. Comput. Simul. 1996, 42, 233–244. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Industry | Application Category | Process | GB Type | Target | BB Type |
|---|---|---|---|---|---|---|
| [32,33,34,35,36,92] | Iron and steelmaking | estimation and control | “pickling process”, “continuous casting”, “hot strip mill” | “serial”, “parallel”, “combined” | “concentration of hydrochloric acid”, “tundish temperature”, “scale breaker entry temperature”, “drying rate” | “Taylor series”, “PLS and RF”, “ANN” |
| [37,38,39] | Food industry | estimation and control | ‘fish drying process”, “milk drying process”, “whey separation” | serial | “drying rate”, “moisture contents”, “membrane fouling” | “ANN”, “exponential static membrane resistance function” |
| [45,46,47,48,49,50,51,52,53,54,93] | Chemical, biochemical, and pharmaceutical | “estimation and optimization”, “estimation and control” | “fermentation extraction”, “twin screw extruder ”, “extrusion”, “mold cooling”, “acetone-butanol ethanol fermentation process”, “MP fermentation”, “fed-batch fermentation”, “evaporation plant” | “serial”, “parallel” | “mycelia concentration”, “sugar concentration and chemical potency”, “growth rate”, “biomass concentration”, “substrate concentration and relative enzyme activity”, “substrate concentration and product concentration”, “polymerization”, “extraction yield”, “heat-transfer coefficient”, “die melting temperature”, “melt viscosity”, “cavity temperature profile” | “ARMAX”, “GA”, “ANN”, “ALAMO”, “MLSSVM integrated with artificial bee colony optimization algorithm”, “LS-SVM”, “neuro fuzzy network”, “SOS constrained polynomial regression” |
| Paper | Industry | Application Category | Process | GB Type | Target | BB Type |
|---|---|---|---|---|---|---|
| [55,56,57] | Power plant | estimation and control | “thermal storage tank”, “feed water heater/ heat exchanger” | serial | “temperature profile and the usable energy stored”, “anomaly identification”, “irradiation angle” | “simultaneous perturbation stochastic approximation”, “ANN”, “fast recursive algorithm” |
| [40,41,42,43,44] | Oil and gas processing | “estimation and control”, “estimation”, “estimation and optimization” | “CDU”, “plant wide”, “hydrocyclone system”, “valve”, “gas-to-liquids processes” | serial | “energy consumption per unit production of diesel”, “CO2 emission”, “flowrate”, “slugging”, “reactor output composition” | “ANN and GA”, “LS cost function”, “EKF”, “non-linear fitting model” |
| [58,59,60] | Water treatment | estimation and control | aeration tank | “serial”, “parallel”, “combined” | “ammonium and nitrate concentration”, “dissolution rate” | “EKF”, “ANN” |
| [61,62,63,64] | Material processing and energy materials | estimation and control | “return materials authorization process”, “thermotronic system”, “photo-voltaic cell” | serial | temperature | “fuzzy membership function”, “SDO”, “LS” |
| Paper | Industry | Application Category | Process | GB Type | Target | BB Type |
|---|---|---|---|---|---|---|
| [65,66,67] | Industrial robot | estimation and control | process automation | serial | “motor angular speed”, “deflection of a piezoelectric micromanipulator”, “machine position” | “weighted logarithmic least squares”, “ANN”, “weighted nonlinear least squares and weighted logarithmic least squares” |
| [95,96,97,98,99,100,101,102] | Miscellaneous | estimation and control | “reactive systems” | “serial”, “paralel” | “reacytion rate”, “product composition”, “heat released”, “design of CSTR”, “concentration distributions in the context of modelling a reaction-advection-diffusion system” | “LS-SVM”, “ANN and EKF”, “ARXIs”, |
| [103,104,105,106,107,108,109,110,111] | Miscellaneous | estmation and control | heat treatment process | serial | “heat release inside the reactor”, “settled material breaking away from the heat transfer surface”, “outlet temperatures of plate heat exchangers”, “temperature of combustion chamber”, “boiler temperature”, “electricity consumption of a refrigeration system”, “spray dryer performance”, “temperature within an imperfectly mixed fluid” | “LS”, “recursive least squares identification”, “taylor series”, “ANN”, “nonlinear least squares optimization”, “linear interpolation”, “MLE” |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, I.; Ayub, A.; Kano, M.; Cheema, I.I. Gray-box Soft Sensors in Process Industry: Current Practice, and Future Prospects in Era of Big Data. Processes 2020, 8, 243. https://doi.org/10.3390/pr8020243
Ahmad I, Ayub A, Kano M, Cheema II. Gray-box Soft Sensors in Process Industry: Current Practice, and Future Prospects in Era of Big Data. Processes. 2020; 8(2):243. https://doi.org/10.3390/pr8020243
Chicago/Turabian StyleAhmad, Iftikhar, Ahsan Ayub, Manabu Kano, and Izzat Iqbal Cheema. 2020. "Gray-box Soft Sensors in Process Industry: Current Practice, and Future Prospects in Era of Big Data" Processes 8, no. 2: 243. https://doi.org/10.3390/pr8020243
APA StyleAhmad, I., Ayub, A., Kano, M., & Cheema, I. I. (2020). Gray-box Soft Sensors in Process Industry: Current Practice, and Future Prospects in Era of Big Data. Processes, 8(2), 243. https://doi.org/10.3390/pr8020243