A Study of the Movement, Structural Stability, and Electrical Performance for Harvesting Ocean Kinetic Energy Based on IPMC Material

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Modelling of the IPMC Movement and Ocean Wave Kinetic Energy
2.1. Modelling of the Relationship between the Input Bending Angle and the Output Voltage
2.2. Ocean Environmental Conditions
2.3. Simulation and Experimental Setups
3. Results and Discussion
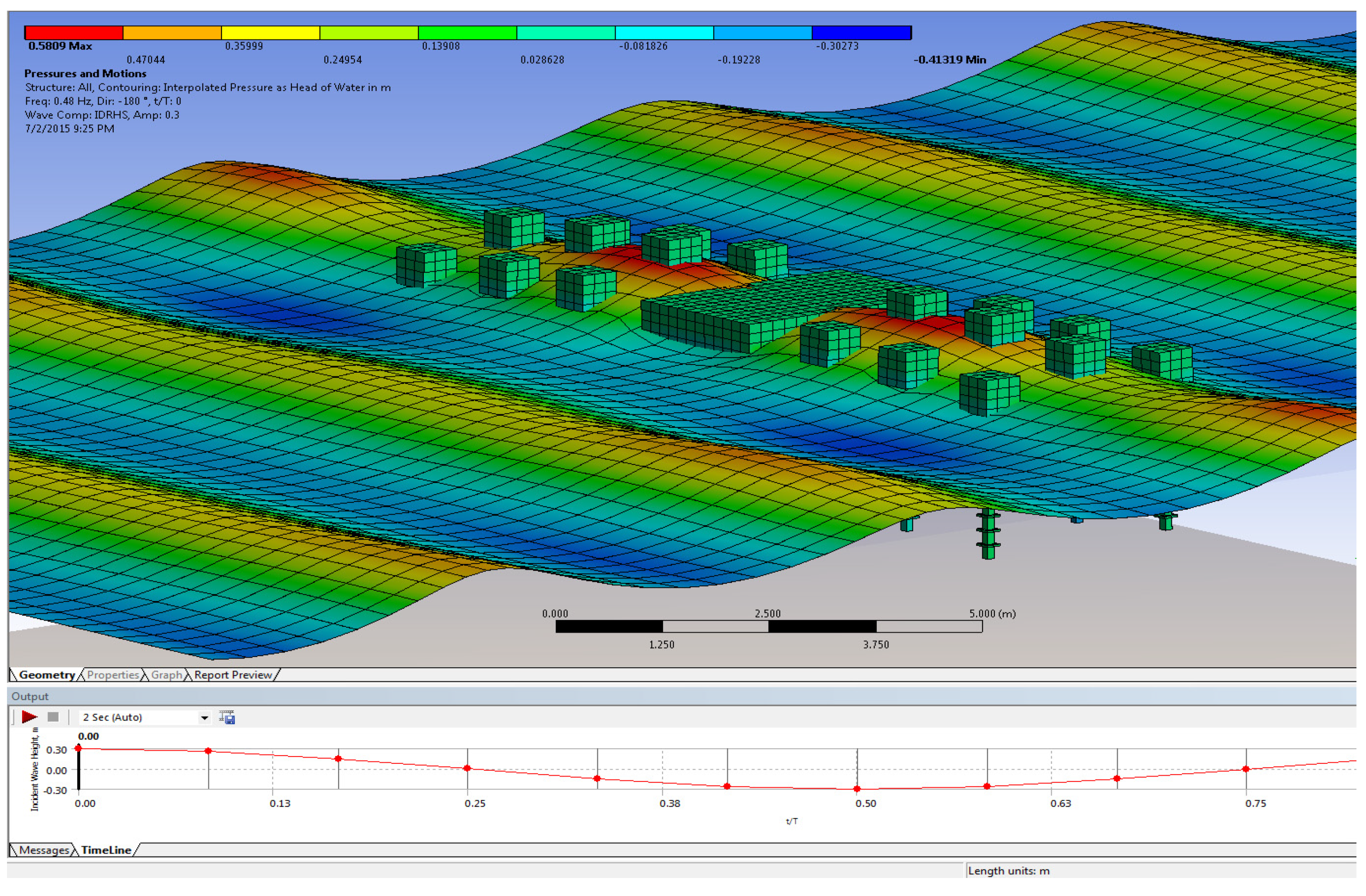
3.1. Pressure and Motion Results
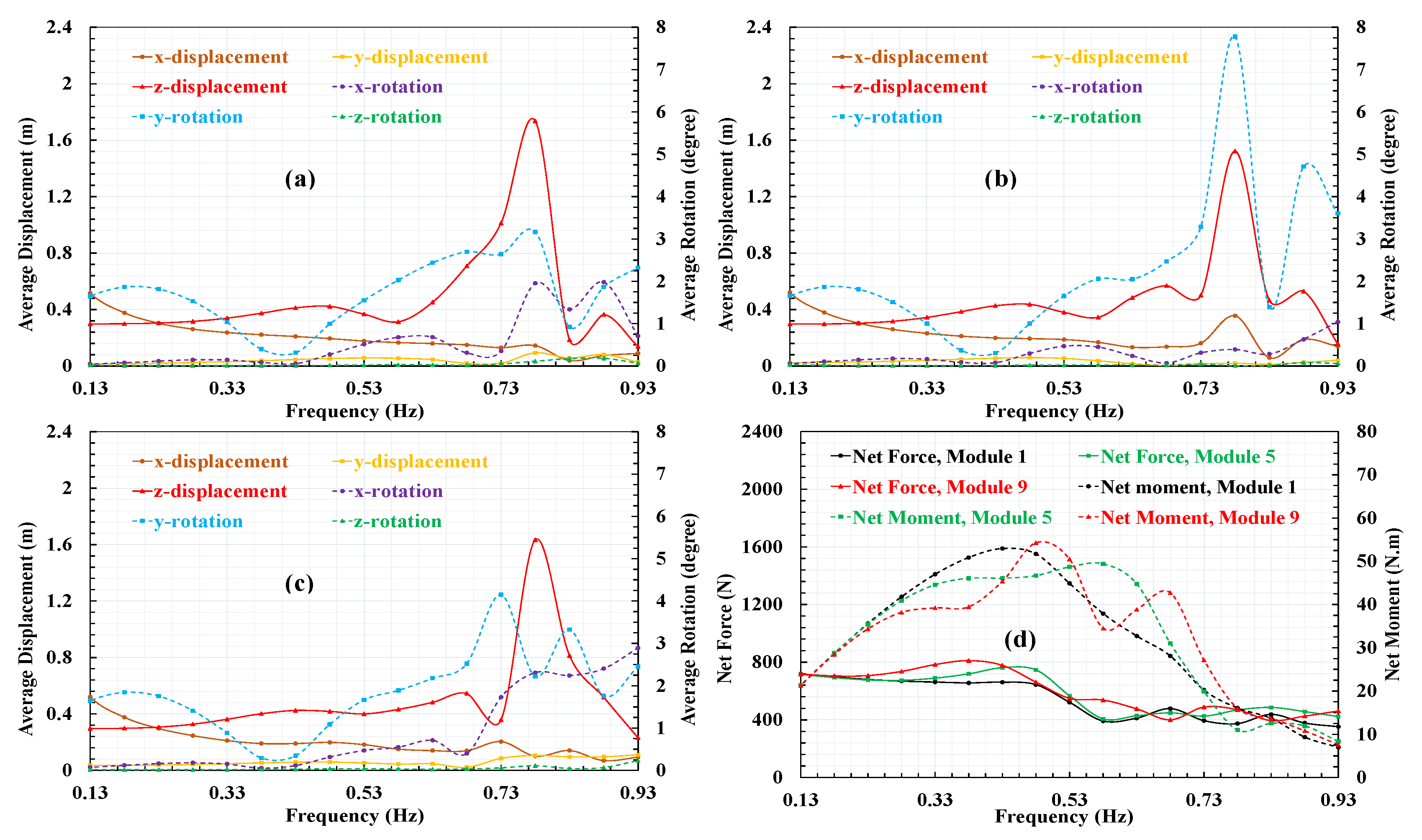
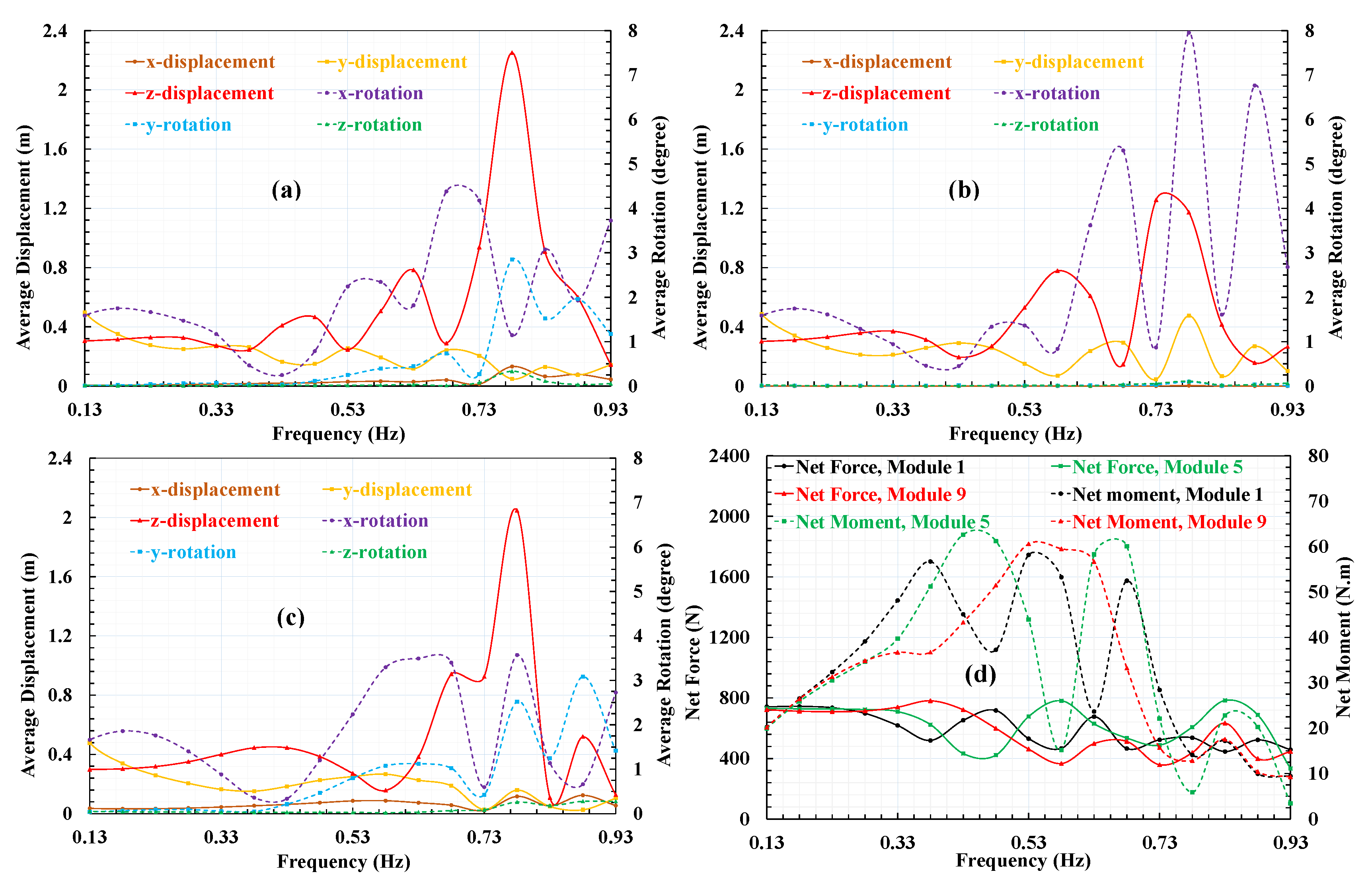
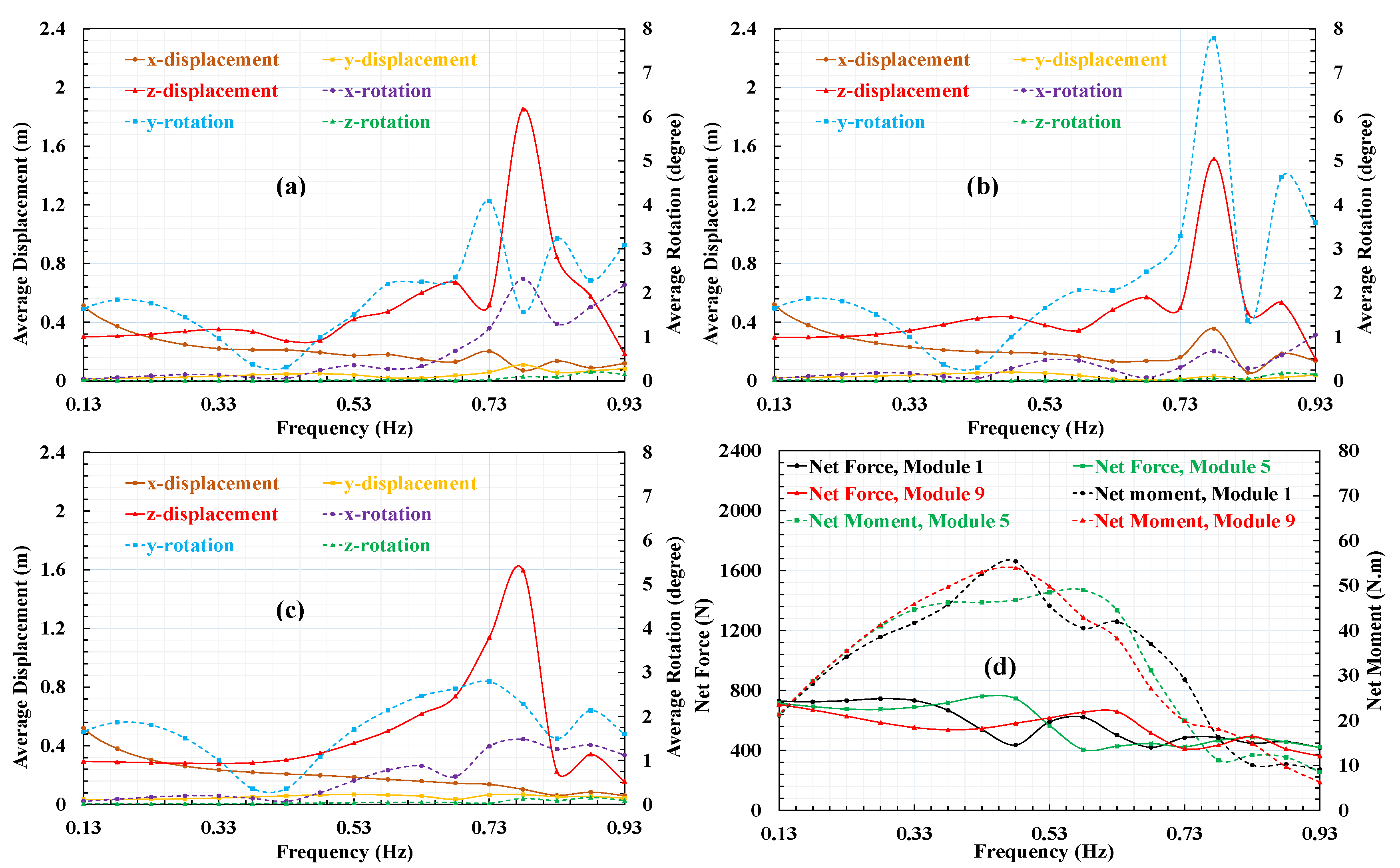
3.2. Effect of Wave Direction and Frequency on the Movement of the Modules
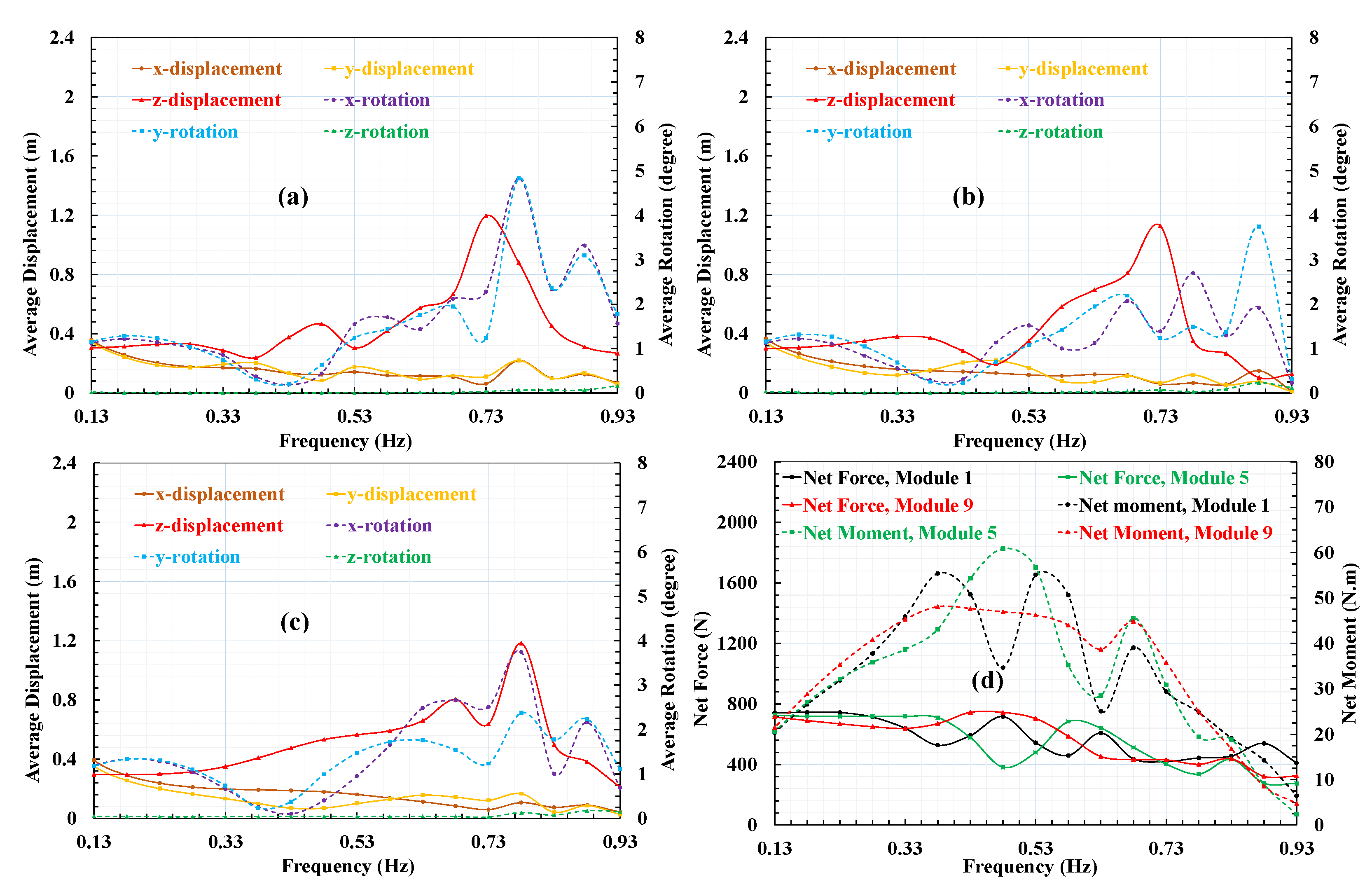
3.3. Effect of the Wetted Surface Area and Mass on the Movement of the Modules
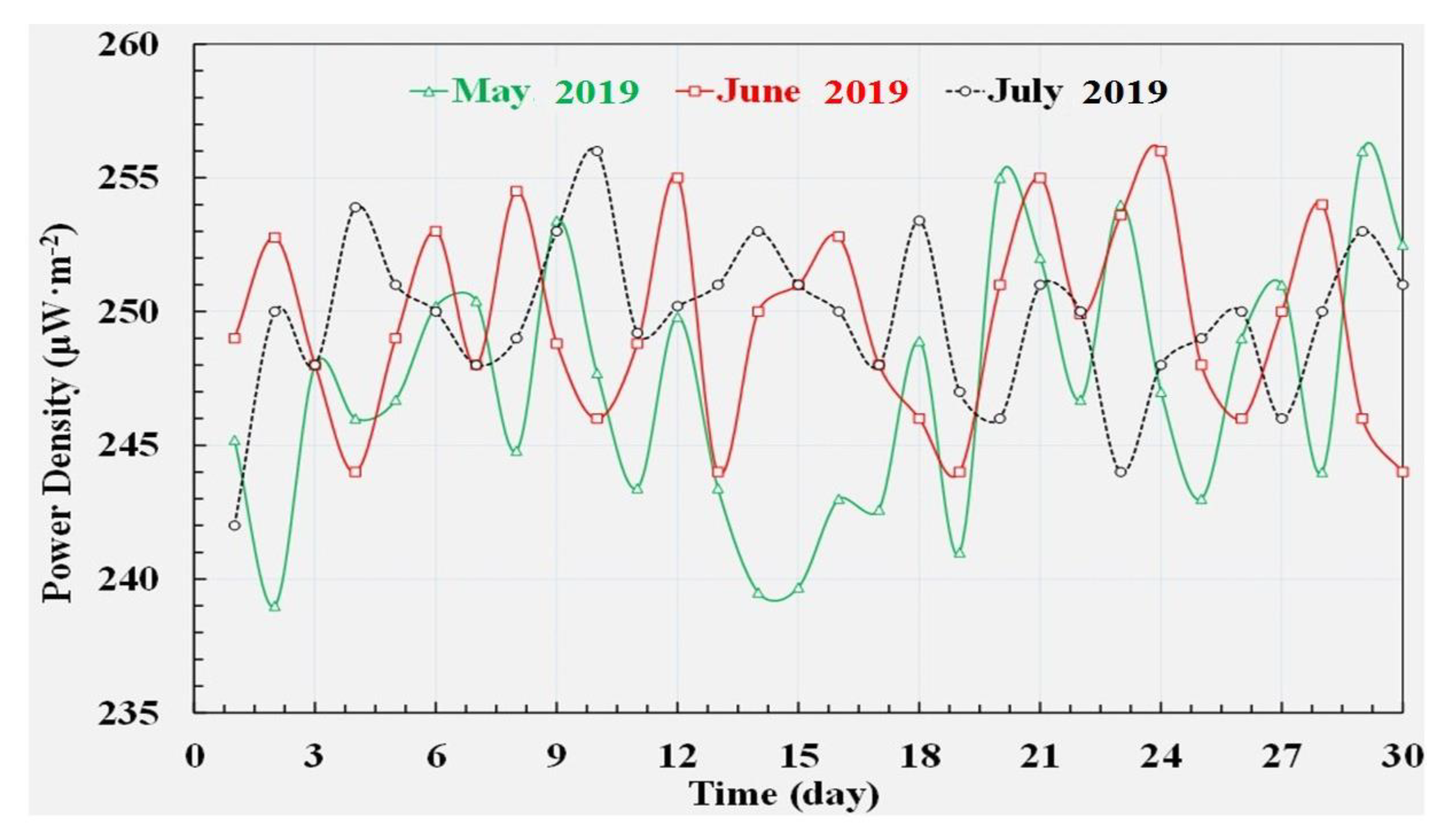
3.4. Performance Test of the Ocean Kinetic Energy Harvesting Modules
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lejerskog, E.; Boström, C.; Hai, L.; Waters, R.; Leijon, M. Experimental results on power absorption from a wave energy converter at the Lysekil wave energy research site. Renew. Energy 2015, 77, 9–14. [Google Scholar]
- Salter, S.H. World progress in wave energy—1988. Int. J. Ambient Energy 1989, 10, 3–24. [Google Scholar] [CrossRef]
- Teillant, B.; Costello, R.; Weber, J.; Ringwood, J. Productivity and economic assessment of wave energy projects through operational simulations. Renew. Energy 2012, 48, 220–230. [Google Scholar] [CrossRef] [Green Version]
- Nunes, G.; Valério, D.; Beirão, P.; Sá da Costa, J. Modelling and control of a wave energy converter. Renew. Energy 2011, 36, 1913–1921. [Google Scholar] [CrossRef]
- Valério, D.; Beirão, P.; Sá da Costa, J. Optimisation of wave energy extraction with the Archimedes Wave Swing. Ocean. Eng. 2007, 34, 2330–2344. [Google Scholar] [CrossRef]
- Martinelli, L.; Zanuttigh, B.; Kofoed, J.P. Selection of design power of wave energy converters based on wave basin experiments. Renew. Energy 2011, 36, 3124–3132. [Google Scholar] [CrossRef]
- Sheng, W.; Alcorn, R.; Lewis, T. Physical modelling of wave energy converters. Ocean. Eng. 2014, 84, 29–36. [Google Scholar] [CrossRef]
- Babajani, A.; Jafari, M.; Hafezisefat, P.; Mirhosseini, M.; Rezania, A.; Rosendahl, L. Parametric study of a wave energy converter (Searaser) for Caspian Sea. Energy Procedia 2018, 147, 334–342. [Google Scholar] [CrossRef]
- Hals, J.; Falnes, J.; Moan, T. A comparison of selected strategies for adaptive control of wave energy converters. J. Offshore Mech. Arct. Eng. 2011, 133. [Google Scholar] [CrossRef]
- Uihlein, A.; Magagna, D. Wave and tidal current energy—A review of the current state of research beyond technology. Renew. Sustain. Energy Rev. 2016, 58, 1070–1081. [Google Scholar] [CrossRef]
- Kolios, A.; Di Maio, L.F.; Wang, L.; Cui, L.; Sheng, Q. Reliability assessment of point-absorber wave energy converters. Ocean. Eng. 2018, 163, 40–50. [Google Scholar] [CrossRef]
- Yamaç, H.İ.; Koca, A. Numerical analysis of wave energy converting systems in case of using piezoelectric materials for energy harvesting. J. Mar. Eng. Technol. 2018, 4177. [Google Scholar] [CrossRef]
- Chow, Y.C.; Chang, Y.C.; Lin, C.C.; Chen, J.H.; Tzang, S.Y. Experimental investigations on wave energy capture of two bottom-hinged-flap WECs operating in tandem. Ocean. Eng. 2018, 164, 322–331. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, D.; Guo, F.; Gao, Y.; Sun, Y. The maximum wave energy conversion by two interconnected floaters: Effects of structural flexibility. Appl. Ocean. Res. 2018, 71, 34–47. [Google Scholar] [CrossRef]
- Zheng, S.M.; Zhang, Y.H.; Zhang, Y.L.; Sheng, W.A. Numerical study on the dynamics of a two-raft wave energy conversion device. J. Fluids Struct. 2015, 58, 271–290. [Google Scholar] [CrossRef]
- Khojasteh, D.; Kamali, R. Evaluation of wave energy absorption by heaving point absorbers at various hot spots in Iran seas. Energy 2016, 109, 629–640. [Google Scholar] [CrossRef]
- Eriksson, M.; Isberg, J.; Leijon, M. Hydrodynamic modelling of a direct drive wave energy converter. Int. J. Eng. Sci. 2005, 43, 1377–1387. [Google Scholar] [CrossRef]
- Park, S.; Ahn, J.; Lee, J.; Park, S.; Kim, H.M.; Park, K.; Hwang, G.; Kim, M.; Baek, S.; Byun, G.S. An ionic polymer metal composite based electrochemical conversion system in the ocean. Int. J. Electrochem. Sci. 2014, 9, 8067–8078. [Google Scholar]
- Vinh, N.D.; Kim, H.-M. Ocean-based electricity generating system utilizing the electrochemical conversion of wave energy by ionic polymer-metal composites. Electrochem. Commun. 2017, 75. [Google Scholar] [CrossRef]
- Oh, C.; Kim, S.; Kim, H.; Park, G.; Kim, J.; Ryu, J.; Li, P.; Lee, S.; No, K.; Hong, S.; et al. Effects of membrane thickness on the performance of ionic polymer–metal composite actuators. RSC Advances 2019, 14621–14626. [Google Scholar] [CrossRef] [Green Version]
- Li, D.J.; Hong, S.; Heinonen, O. Polymer piezoelectric energy harvesters for low wind speed. Appl. Phys. Lett. 2013, 1–6. [Google Scholar] [CrossRef]
- Kwaśniewski, J.; Dominik, I.; Kaszuba, F. Energy Harvesting System Based on Ionic. Pol. J. Environ. Stud. 2014, 23, 2339–2343. [Google Scholar]
- Cha, Y.; Shen, L.; Porfiri, M. Energy harvesting from underwater torsional vibrations of a patterned ionic polymer metal composite. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Koo, W.; Kim, J. Simplified formulas of heave added mass coefficients at high frequency for various two-dimensional bodies in a finite water depth. Int. J. Nav. Arch.. Ocean. Eng. 2015, 7, 115–127. [Google Scholar] [CrossRef] [Green Version]
- Söylemez, M. A general method for calculating hydrodynamic forces. Ocean. Eng. 1996, 23, 423–445. [Google Scholar] [CrossRef]
- Zheng, Y.H.; Shen, Y.M.; Tang, J. Radiation and diffraction of linear water waves by an infinitely long submerged rectangular structure parallel to a vertical wall. Ocean. Eng. 2007, 34, 69–82. [Google Scholar] [CrossRef]














© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen Duy, V.; Kim, H.-M. A Study of the Movement, Structural Stability, and Electrical Performance for Harvesting Ocean Kinetic Energy Based on IPMC Material. Processes 2020, 8, 641. https://doi.org/10.3390/pr8060641
Nguyen Duy V, Kim H-M. A Study of the Movement, Structural Stability, and Electrical Performance for Harvesting Ocean Kinetic Energy Based on IPMC Material. Processes. 2020; 8(6):641. https://doi.org/10.3390/pr8060641
Chicago/Turabian StyleNguyen Duy, Vinh, and Hyung-Man Kim. 2020. "A Study of the Movement, Structural Stability, and Electrical Performance for Harvesting Ocean Kinetic Energy Based on IPMC Material" Processes 8, no. 6: 641. https://doi.org/10.3390/pr8060641
APA StyleNguyen Duy, V., & Kim, H. -M. (2020). A Study of the Movement, Structural Stability, and Electrical Performance for Harvesting Ocean Kinetic Energy Based on IPMC Material. Processes, 8(6), 641. https://doi.org/10.3390/pr8060641