
Numerical Study of Non-Linear Dynamic Behavior of an Asymmetric Rotor for Wave Energy Converter in Regular Waves


Abstract
:1. Introduction
2. Simulation Model and Wave Conditions
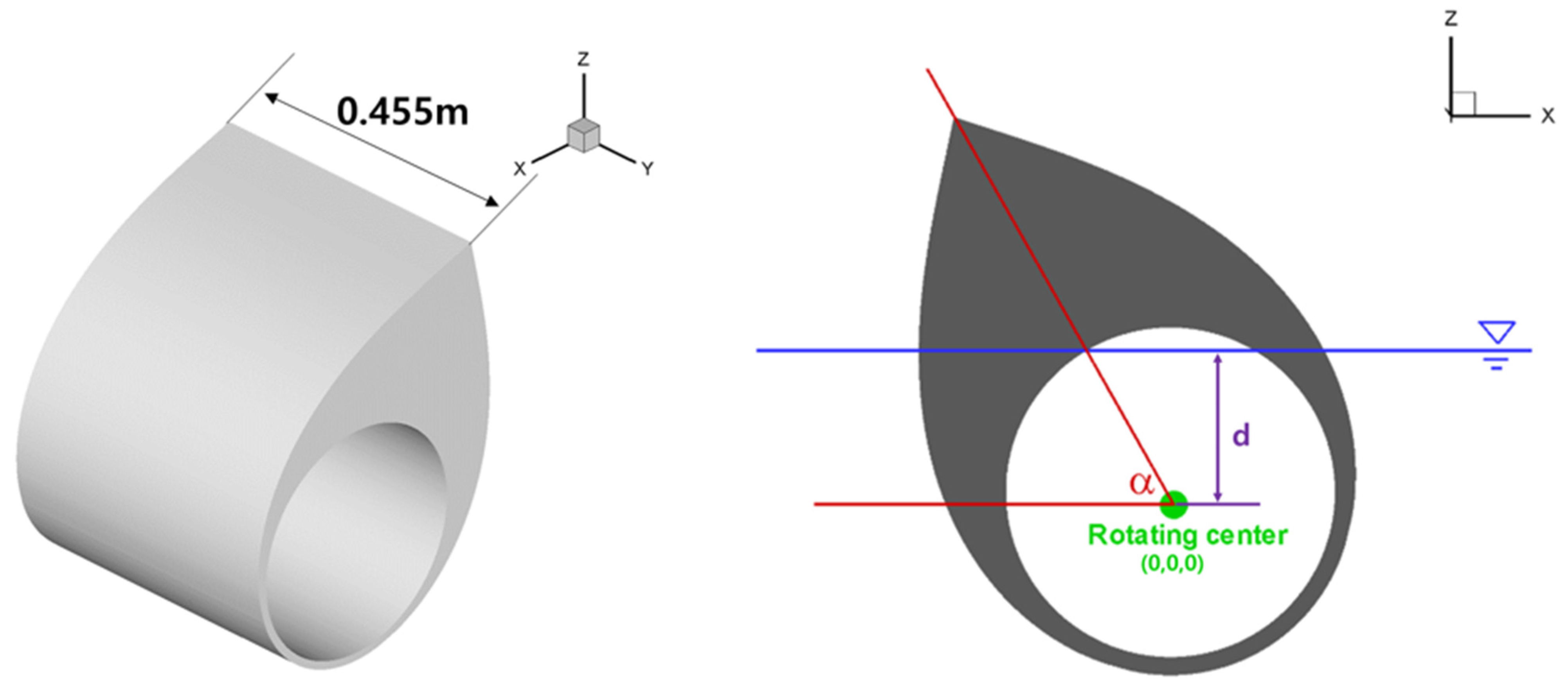
2.1. Simulation Model
2.2. Wave Conditions
3. Numerical Method
3.1. Numerical Schemes
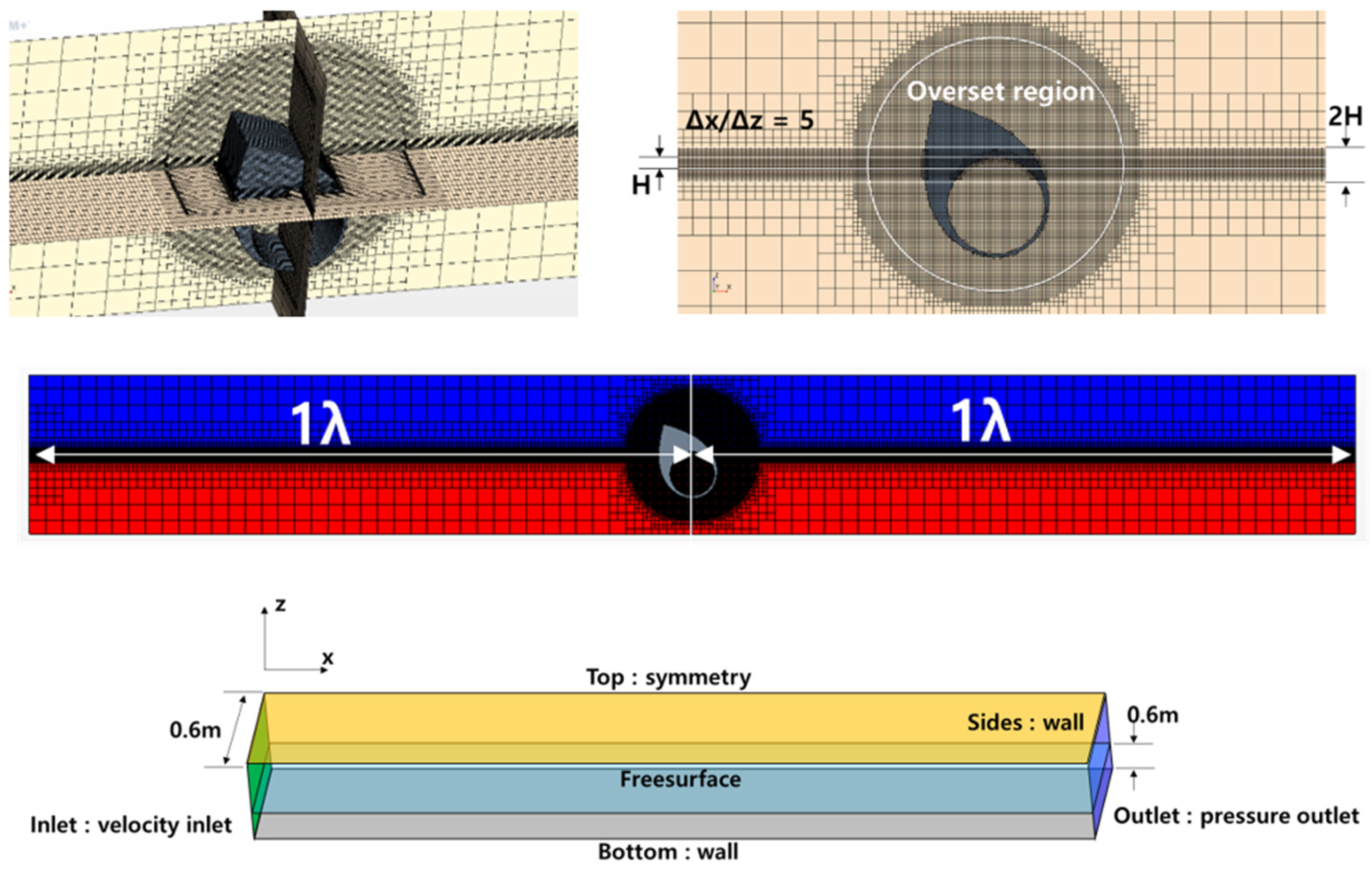
3.2. Grid System and Boundary Condition
4. Results and Discussion
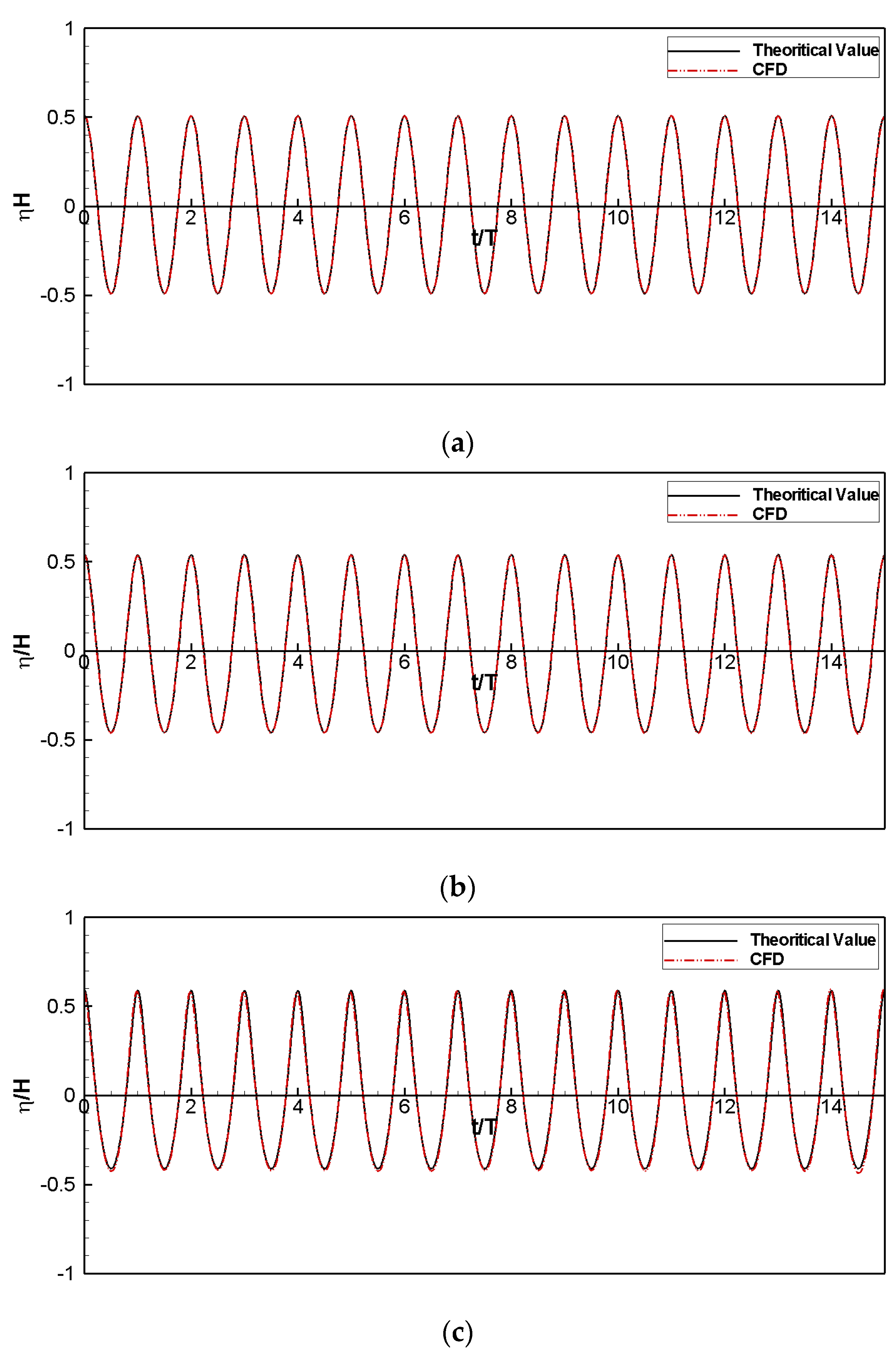
4.1. Wave-Only Simulation
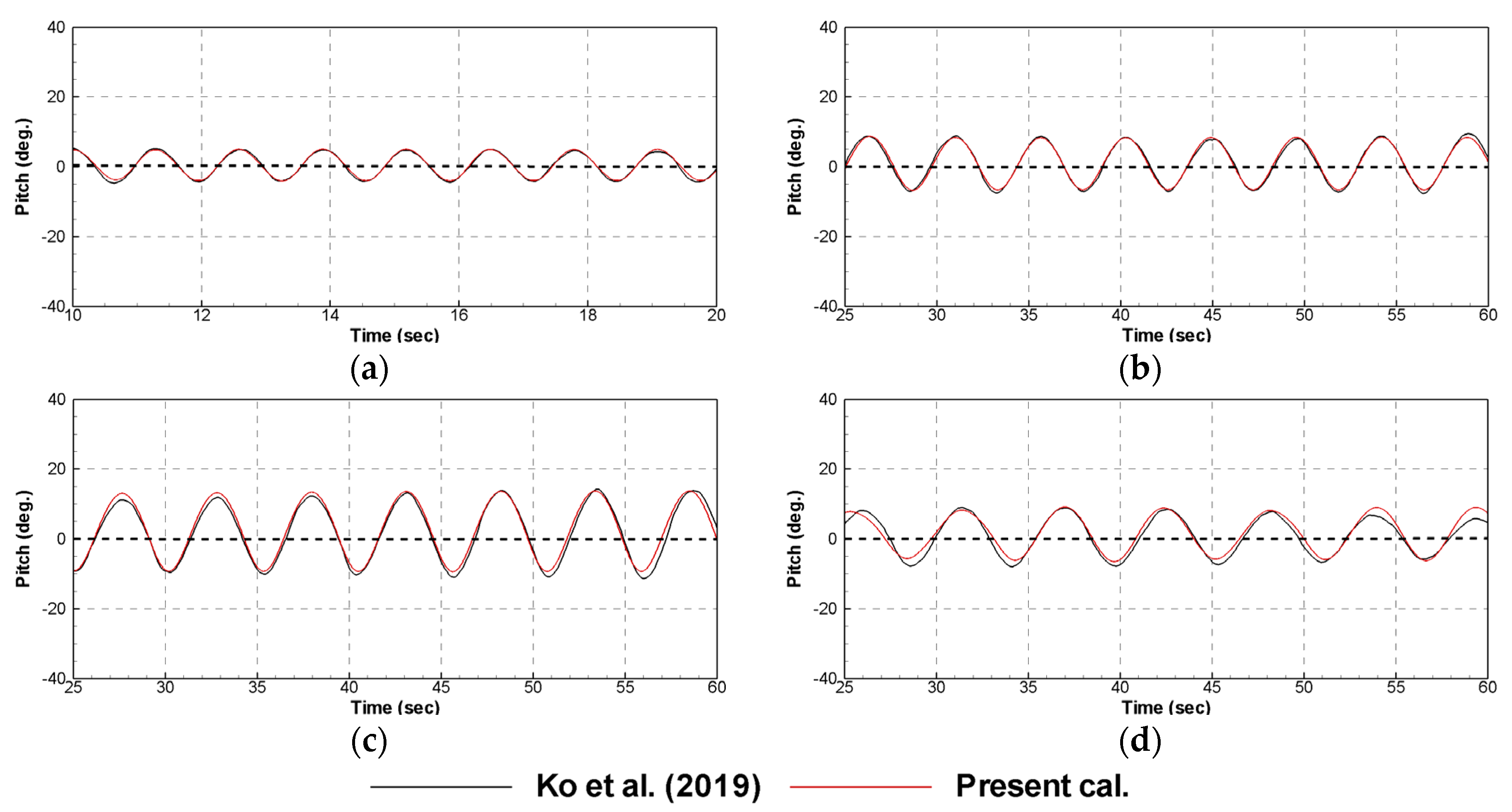
4.2. Lower Wave Heights (with Validation Results)
4.3. High Wave Heights
4.4. Characteristics of Pitch Motion
4.5. Survey for Hydrodynamic Coefficients
5. Conclusions
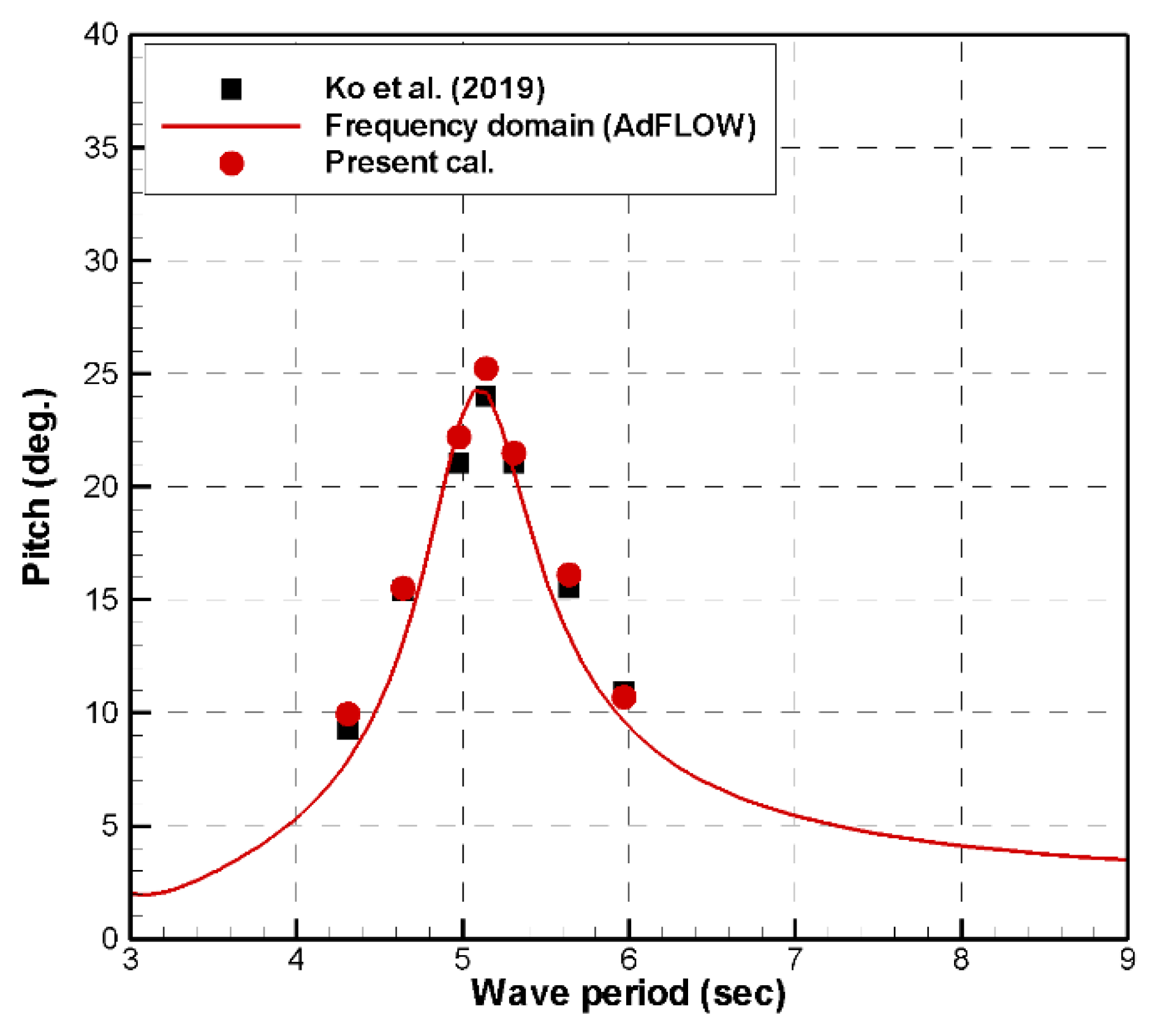
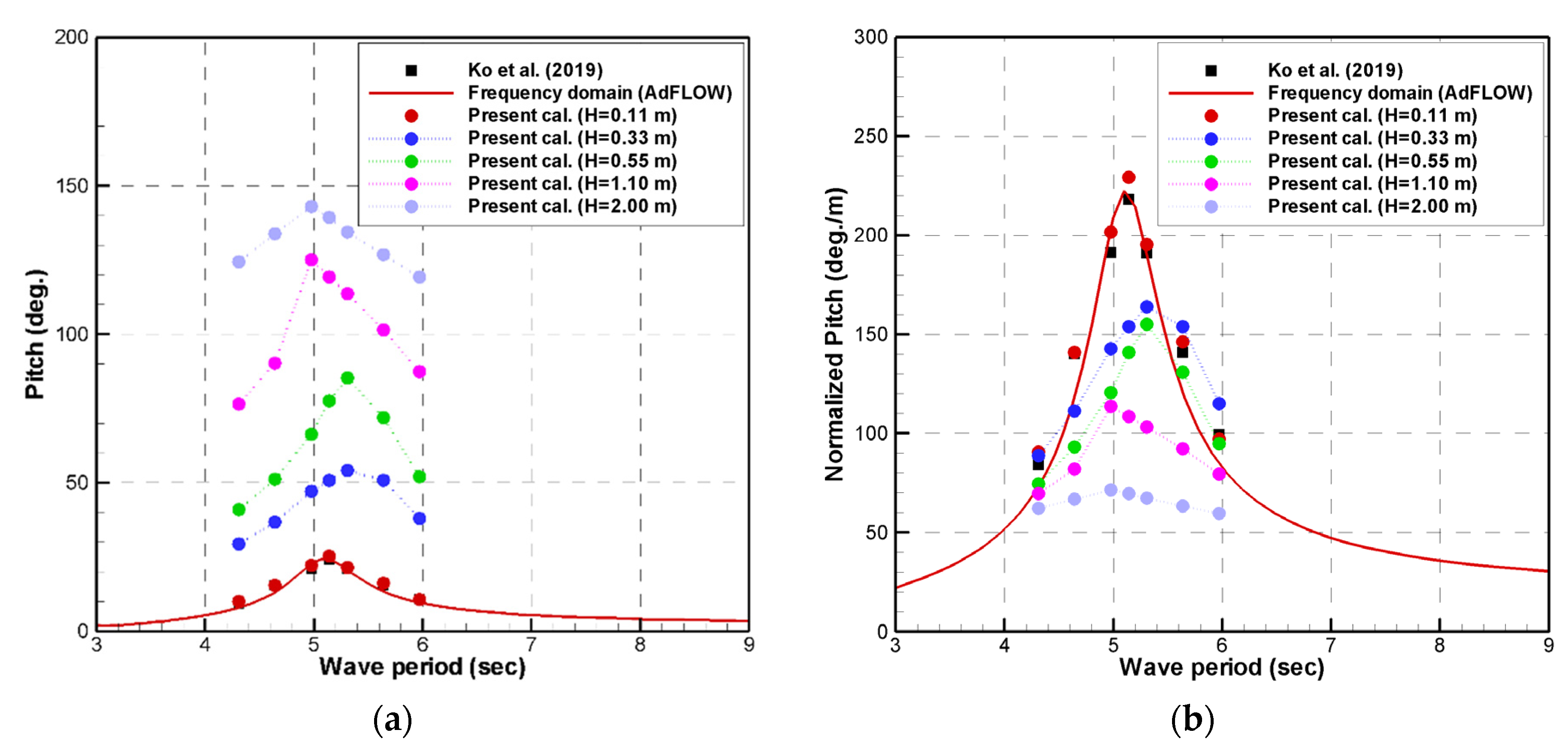
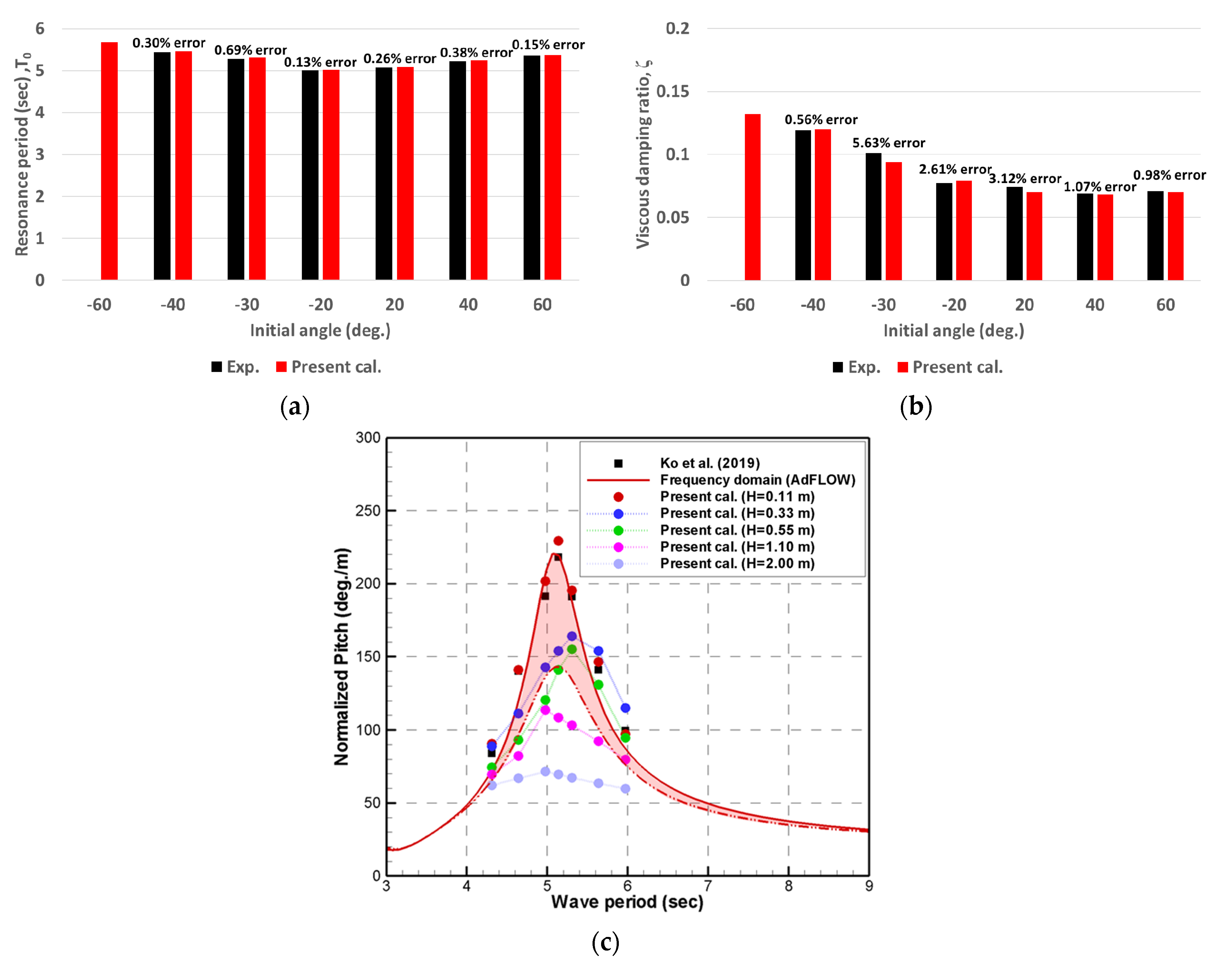
- In this study, the normalized pitch results from the frequency domain analysis in H = 0.11 m and H = 0.33 m have maximum error of about 3% compared to the experimental results. The maximum error for the normalized pitch results between the CFD simulations and experiments is about 5%. In the free-decay test, the maximum error of the resonance period between the CFD simulations and experiments is under 1%, and the maximum error of viscous damping ratio is under 6%. Therefore, the CFD simulation results can be used to interpret the non-linear behavior of the rotor.
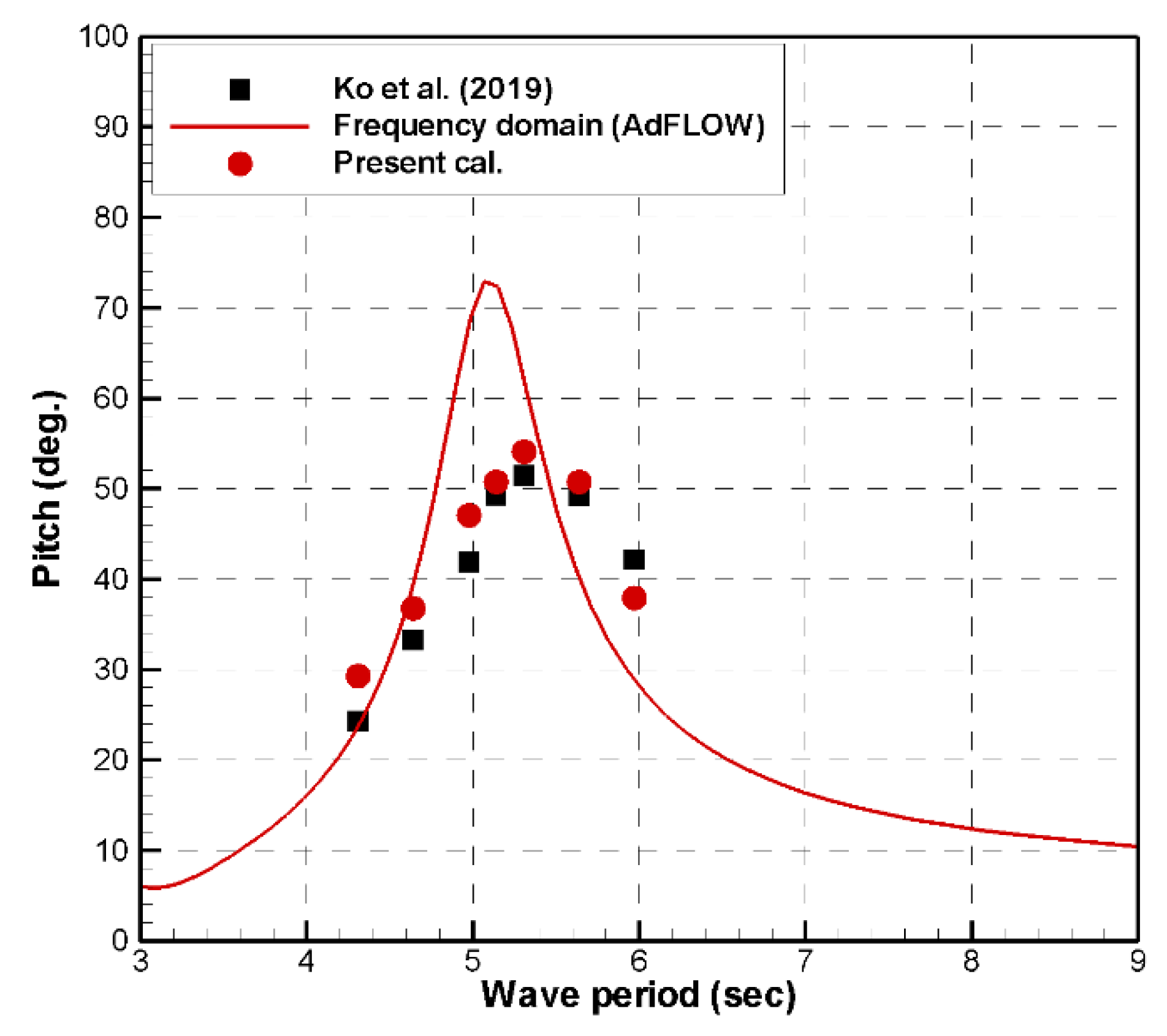
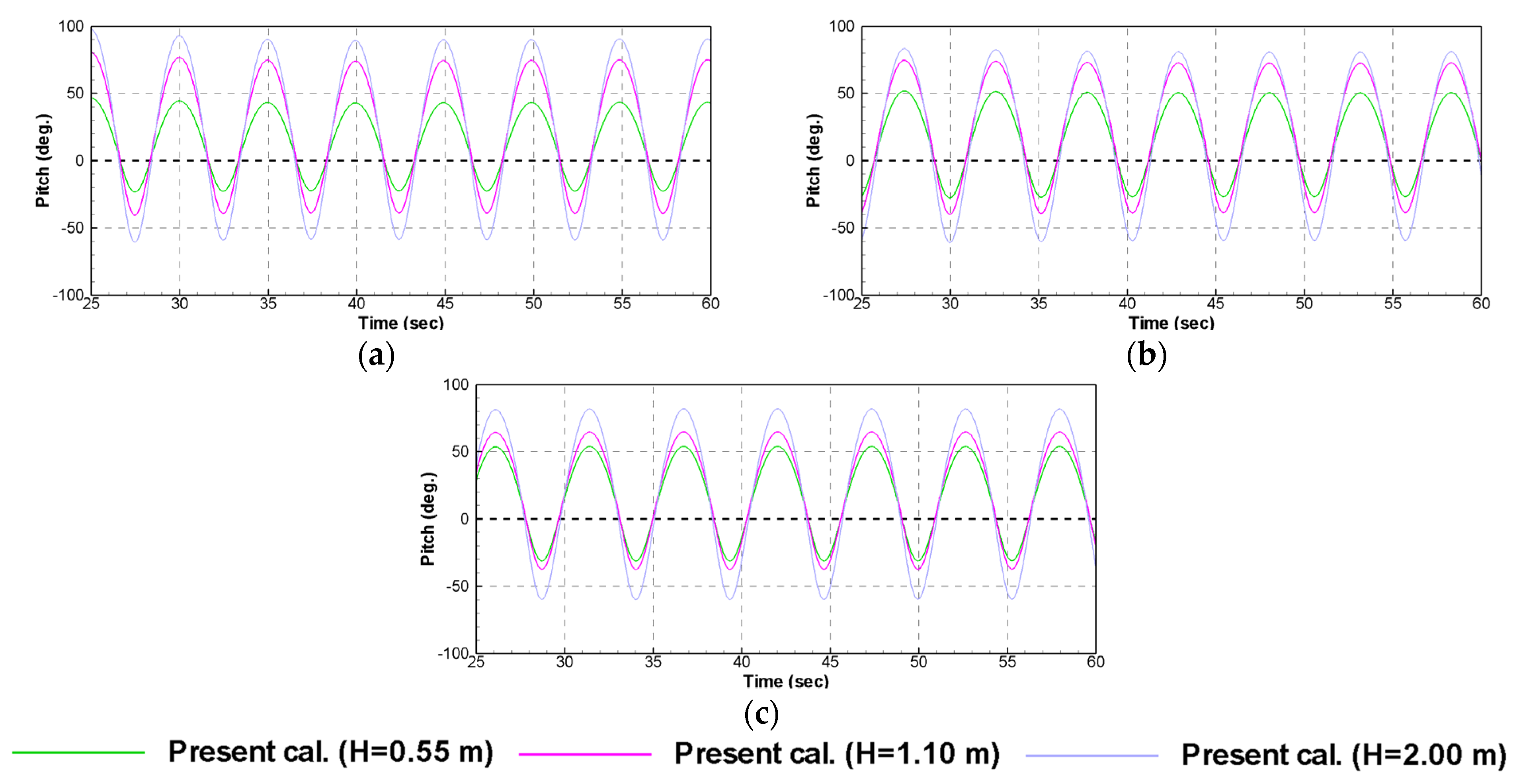
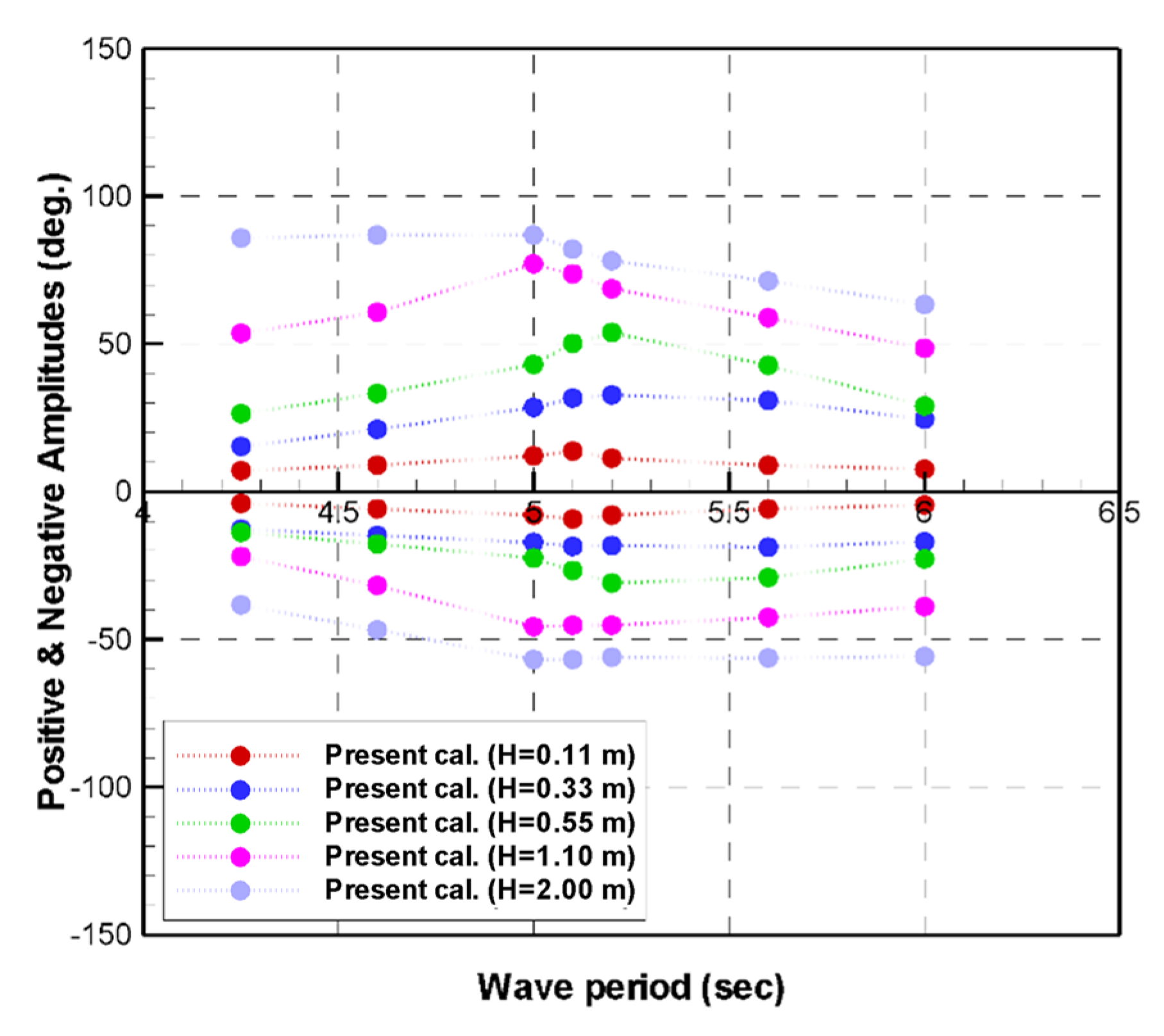
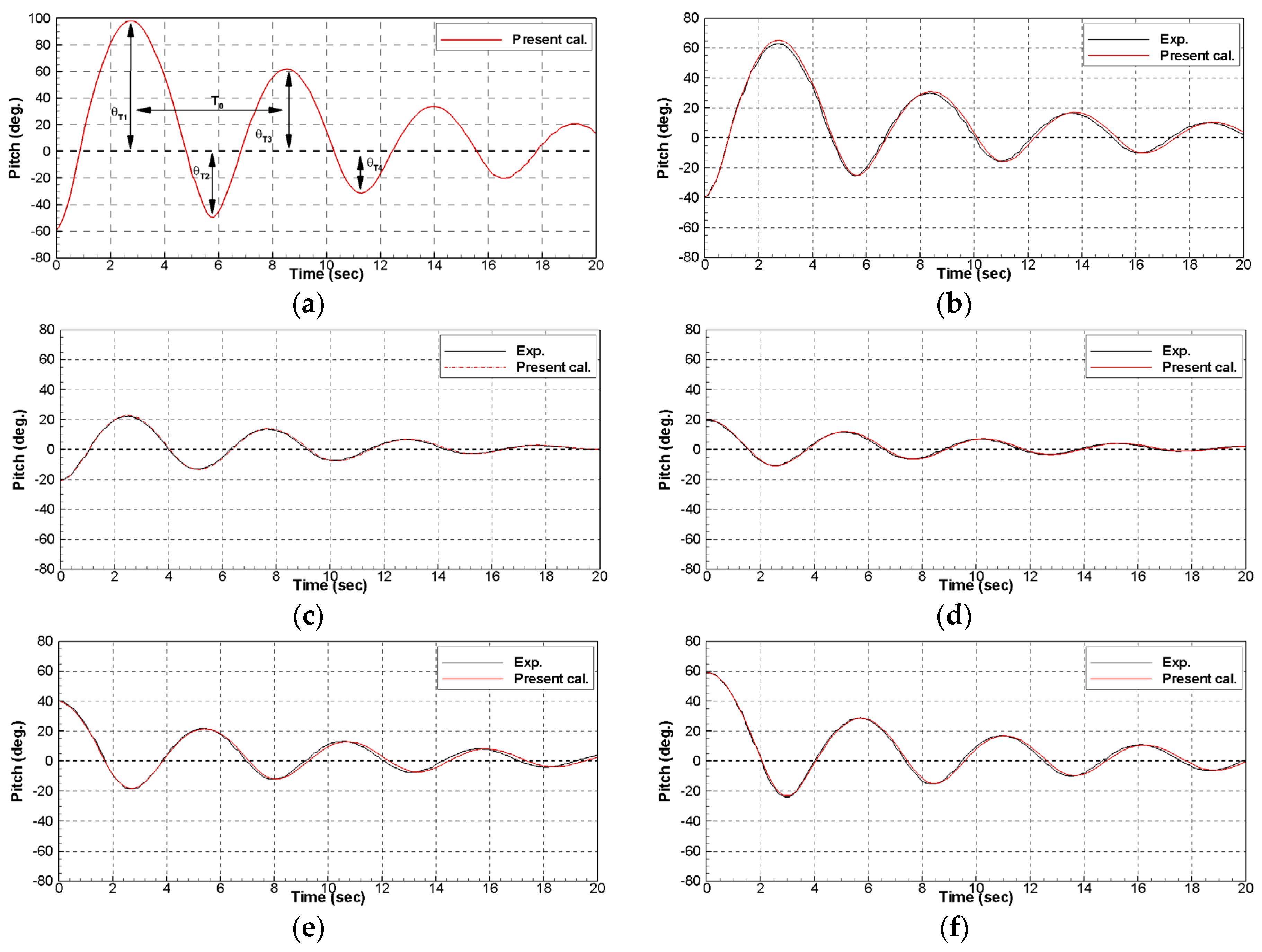
- For a wave height of 0.11 m, the CFD simulation results are in good agreement with the experimental and frequency domain analysis results. As shown in the time histories of the pitch motions, the positive and negative amplitudes of the pitch motions from the CFD simulations have symmetrical shapes, which appear to be linear motions. Therefore, the obtained linear solution is sufficient in the case of a low wave height, and the resonance period of the rotor is located near 5.1 s.
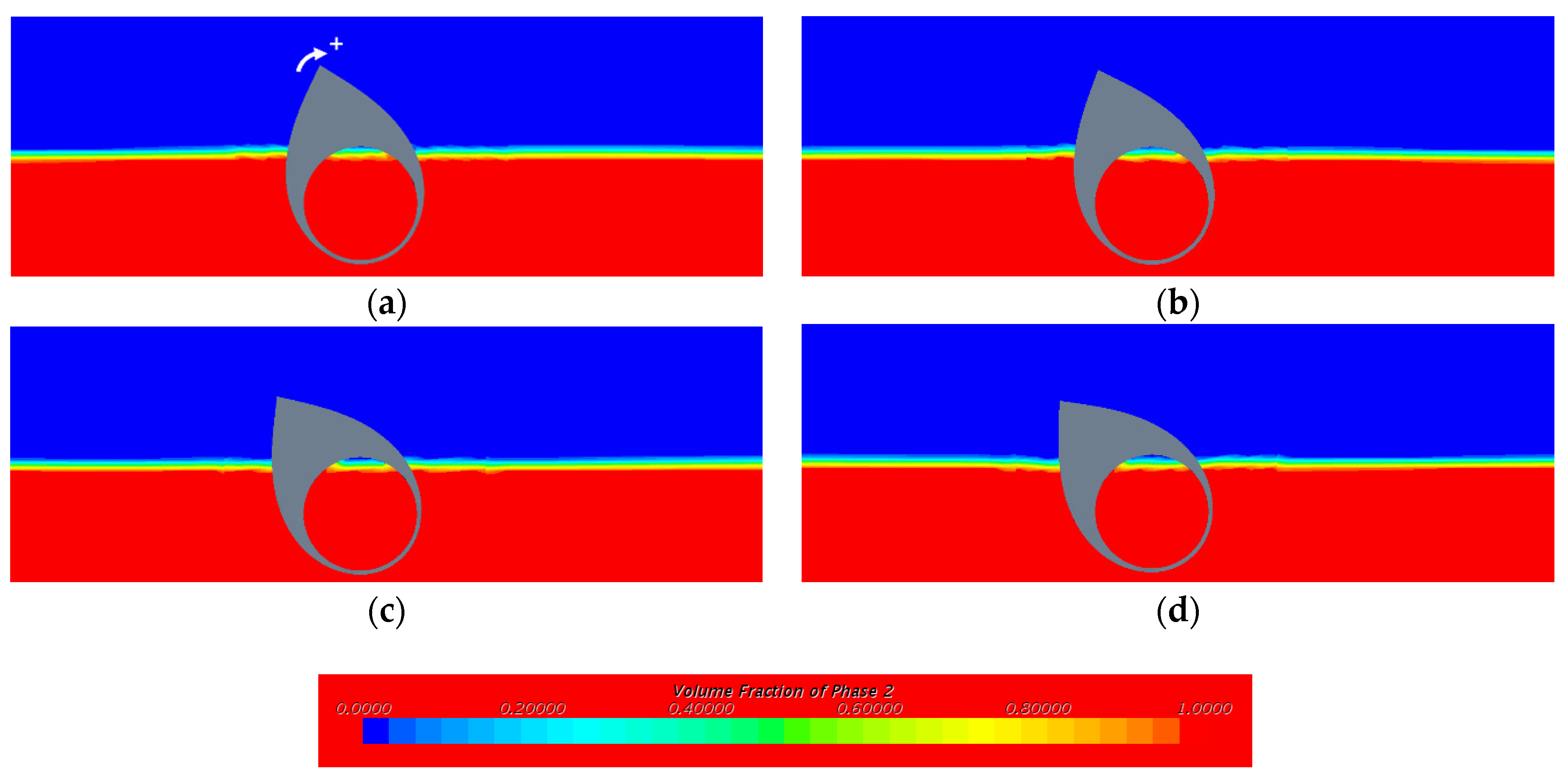
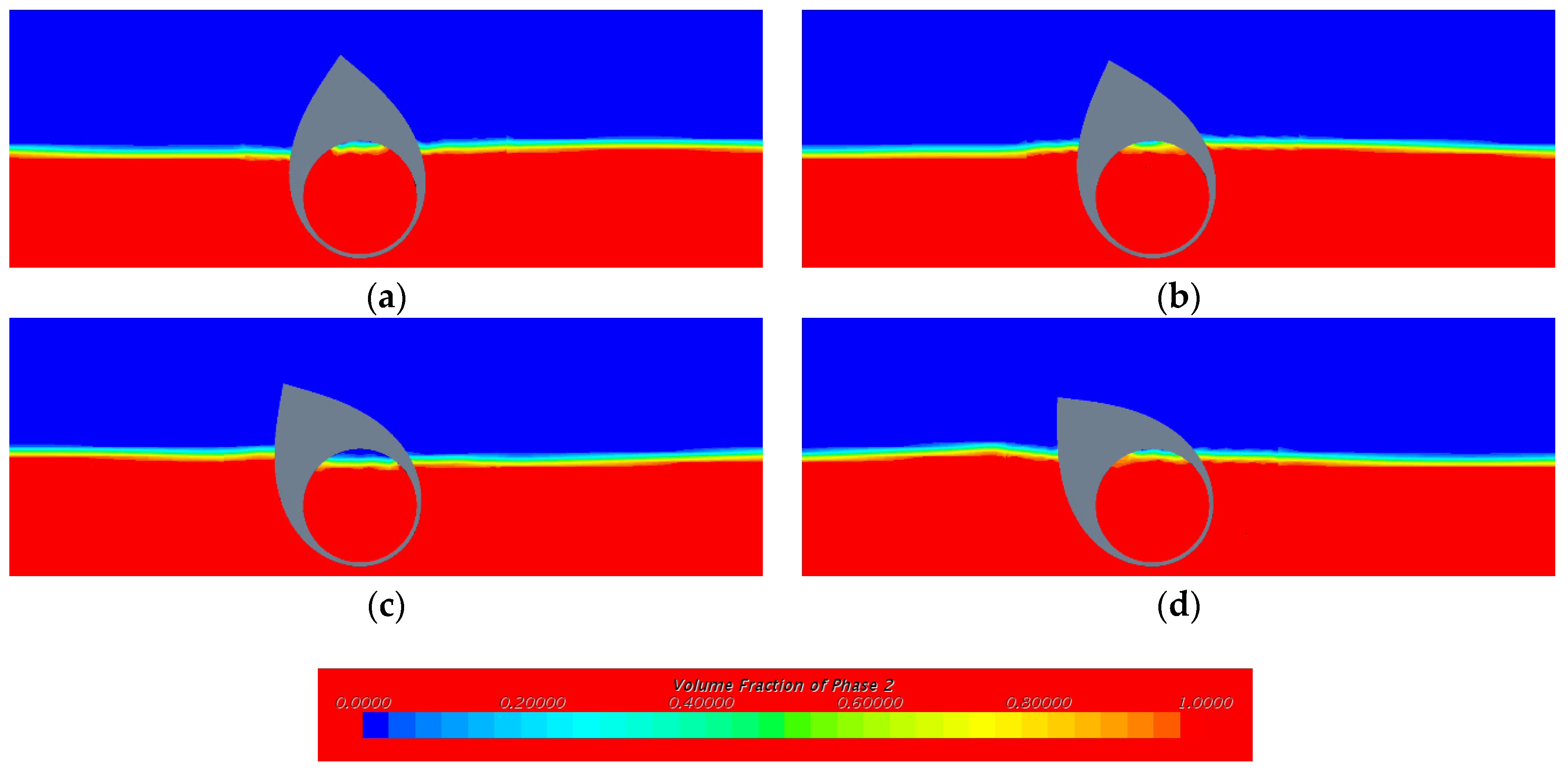
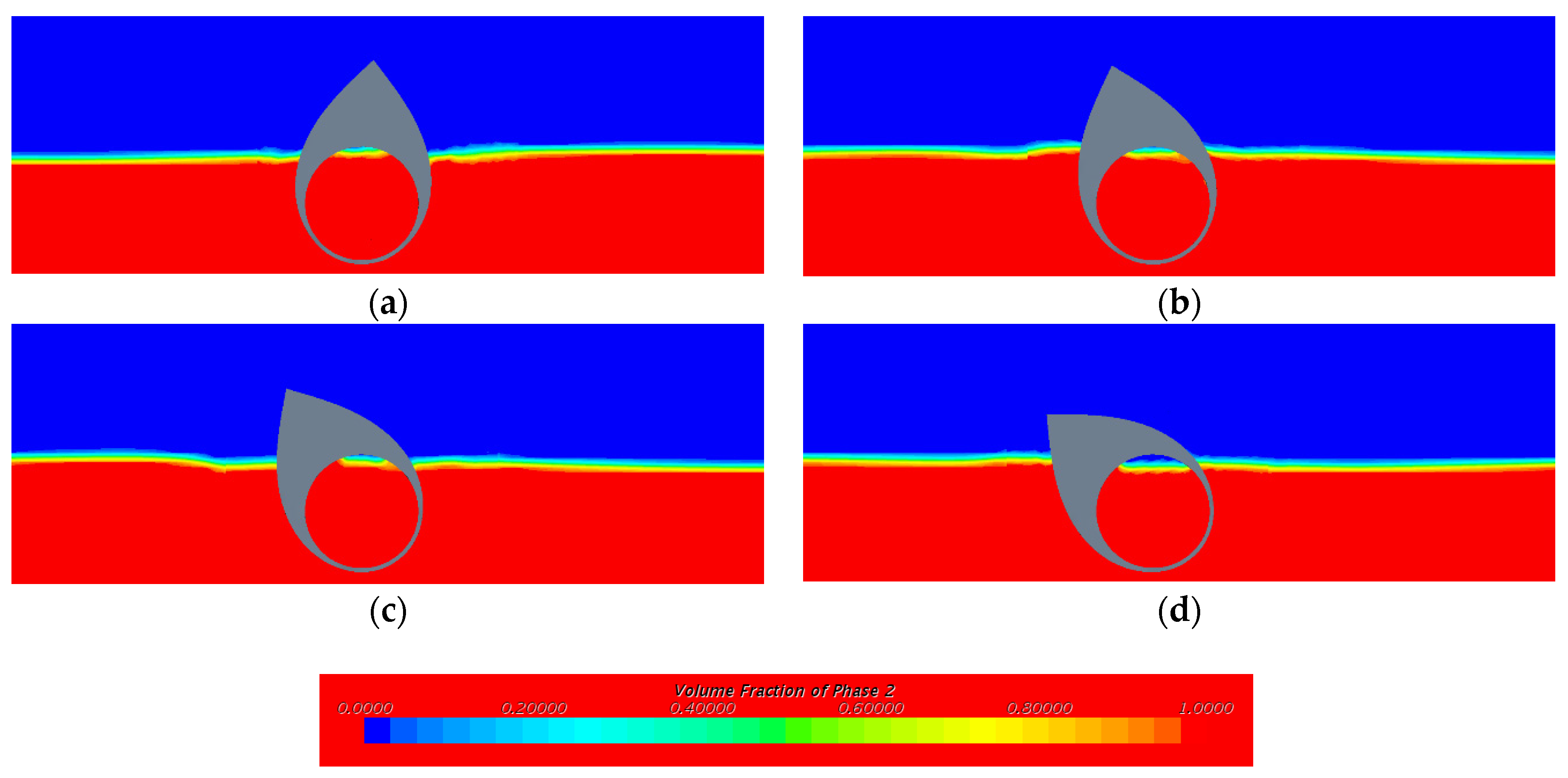
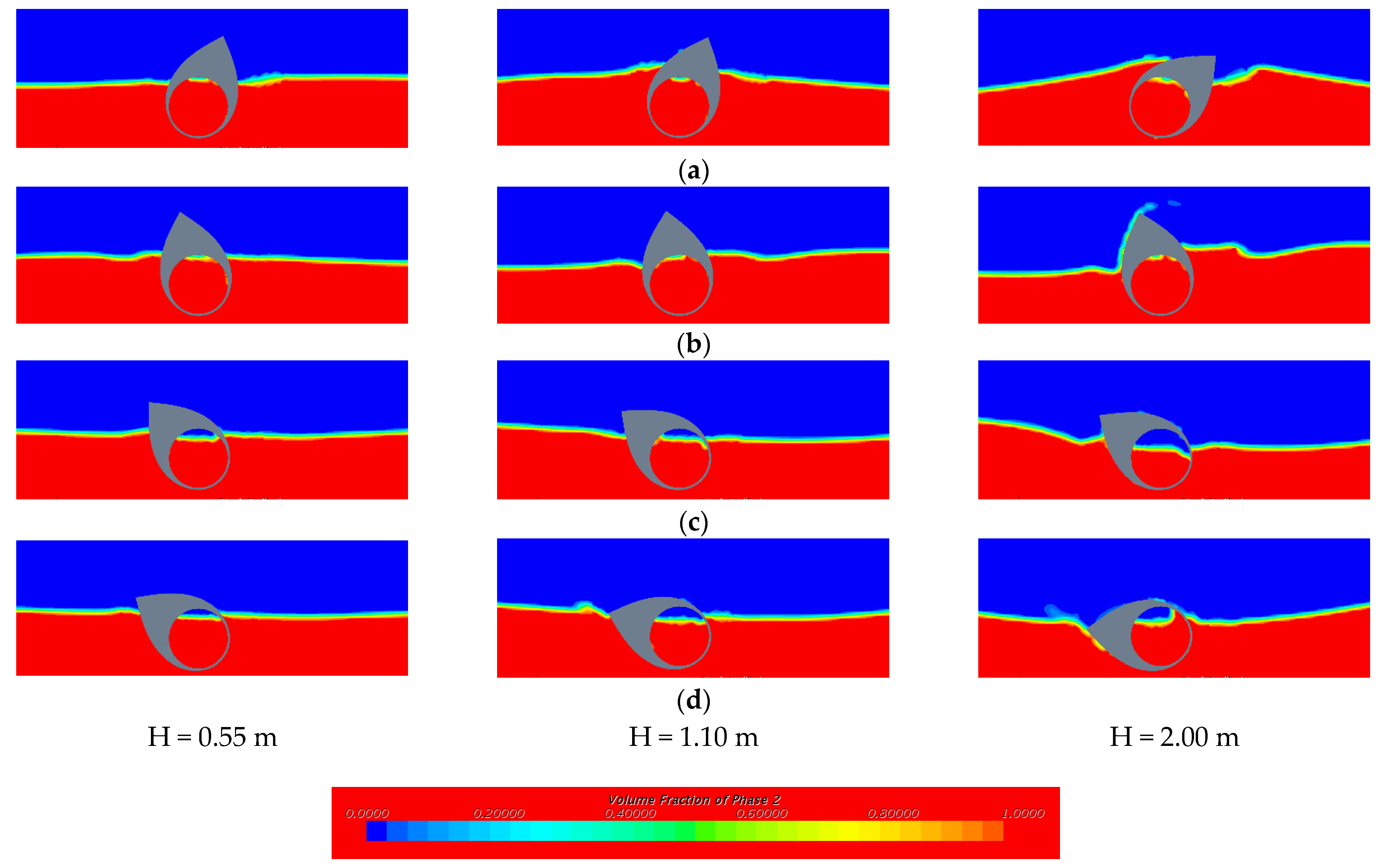
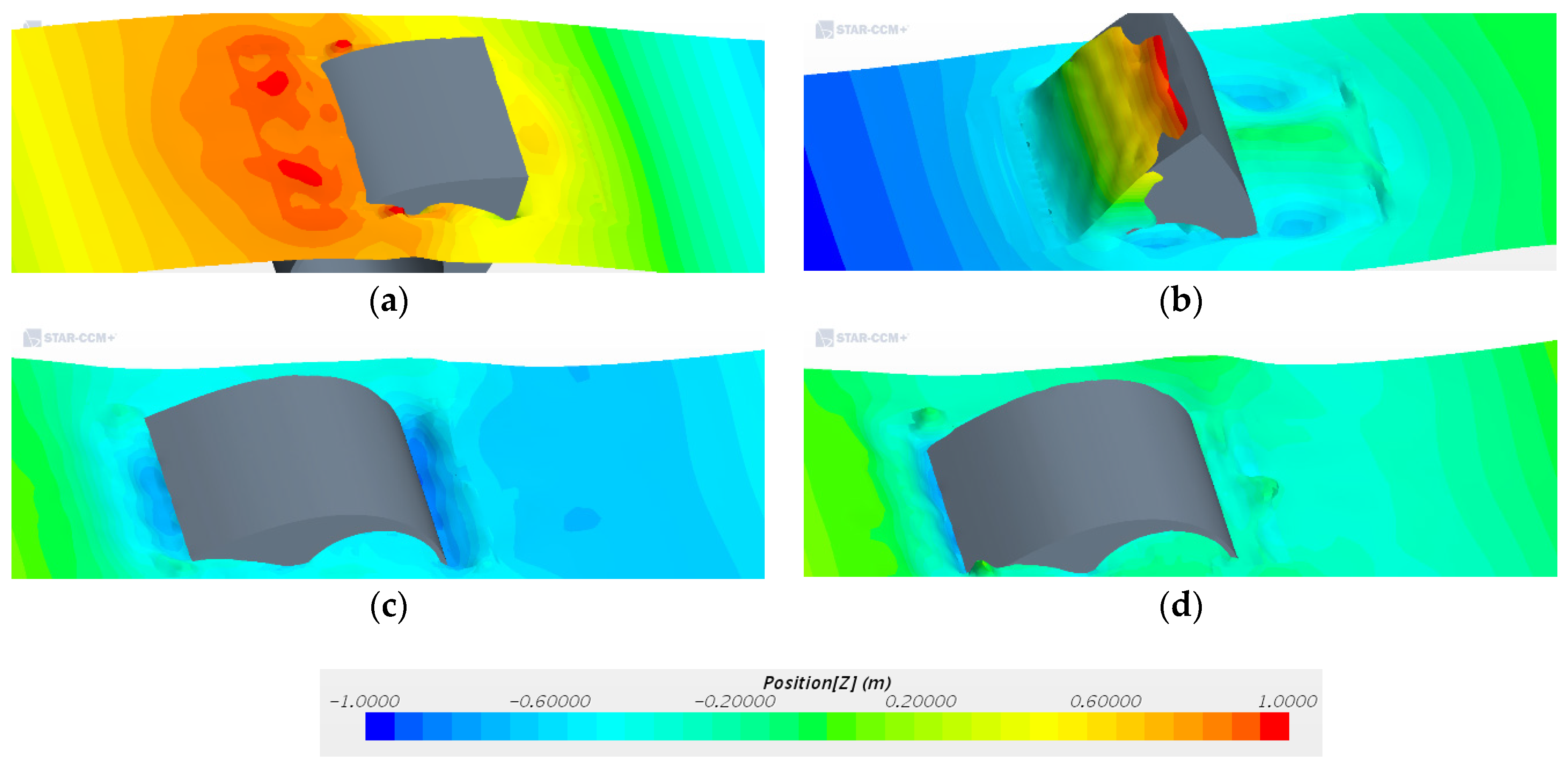
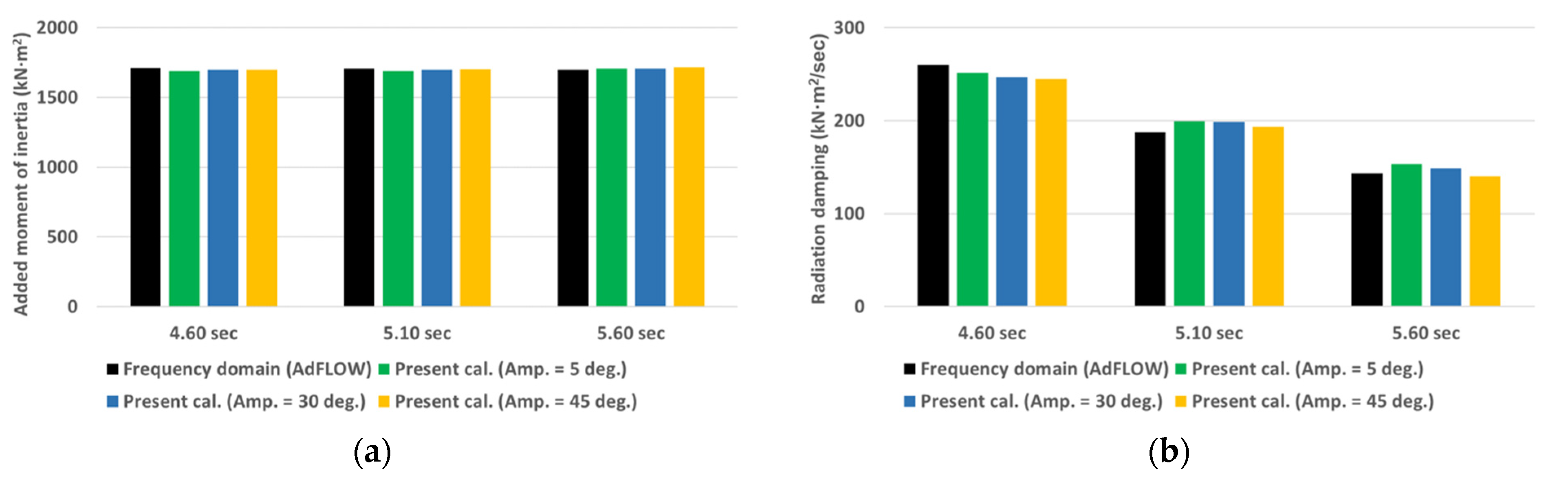
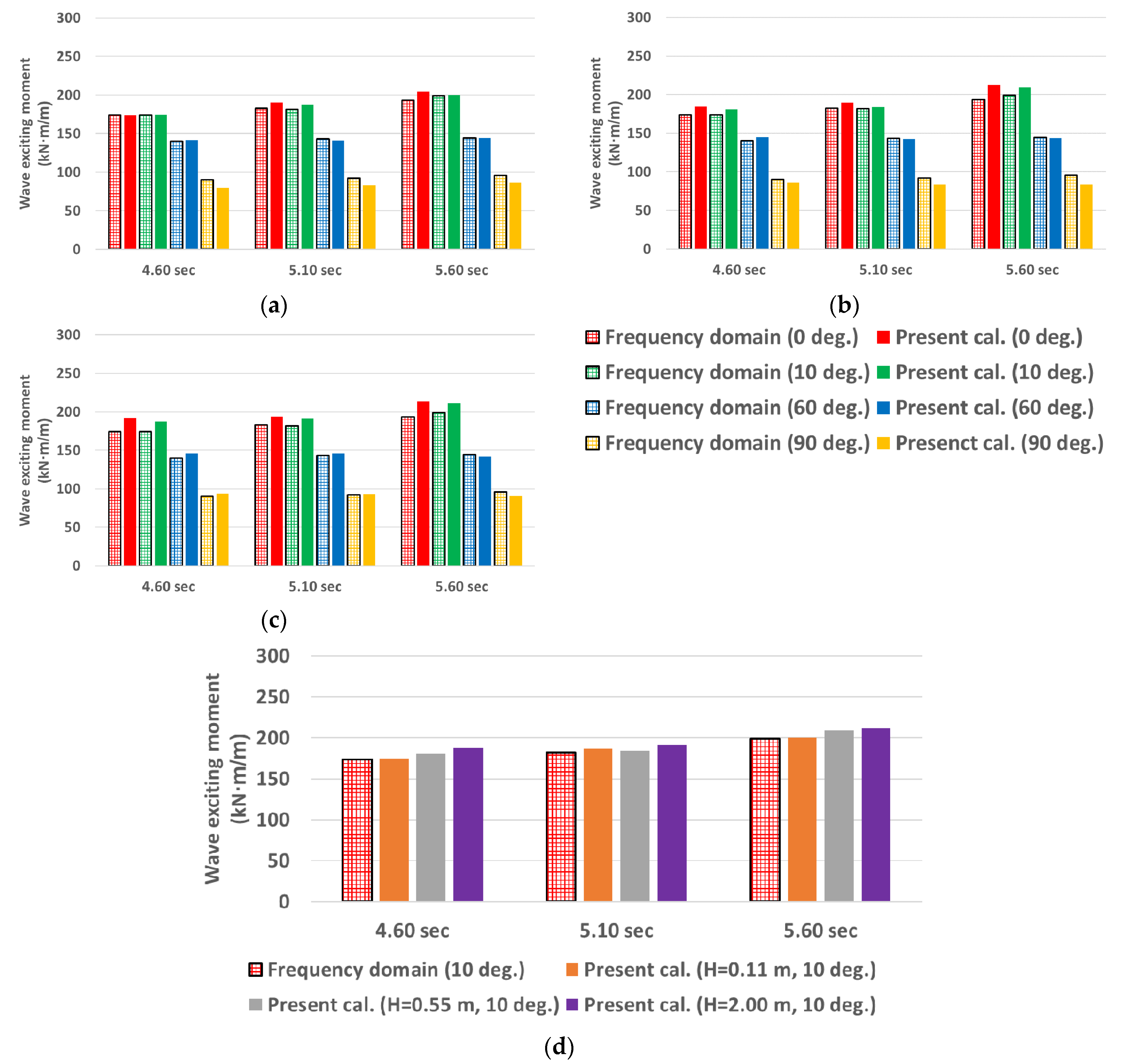
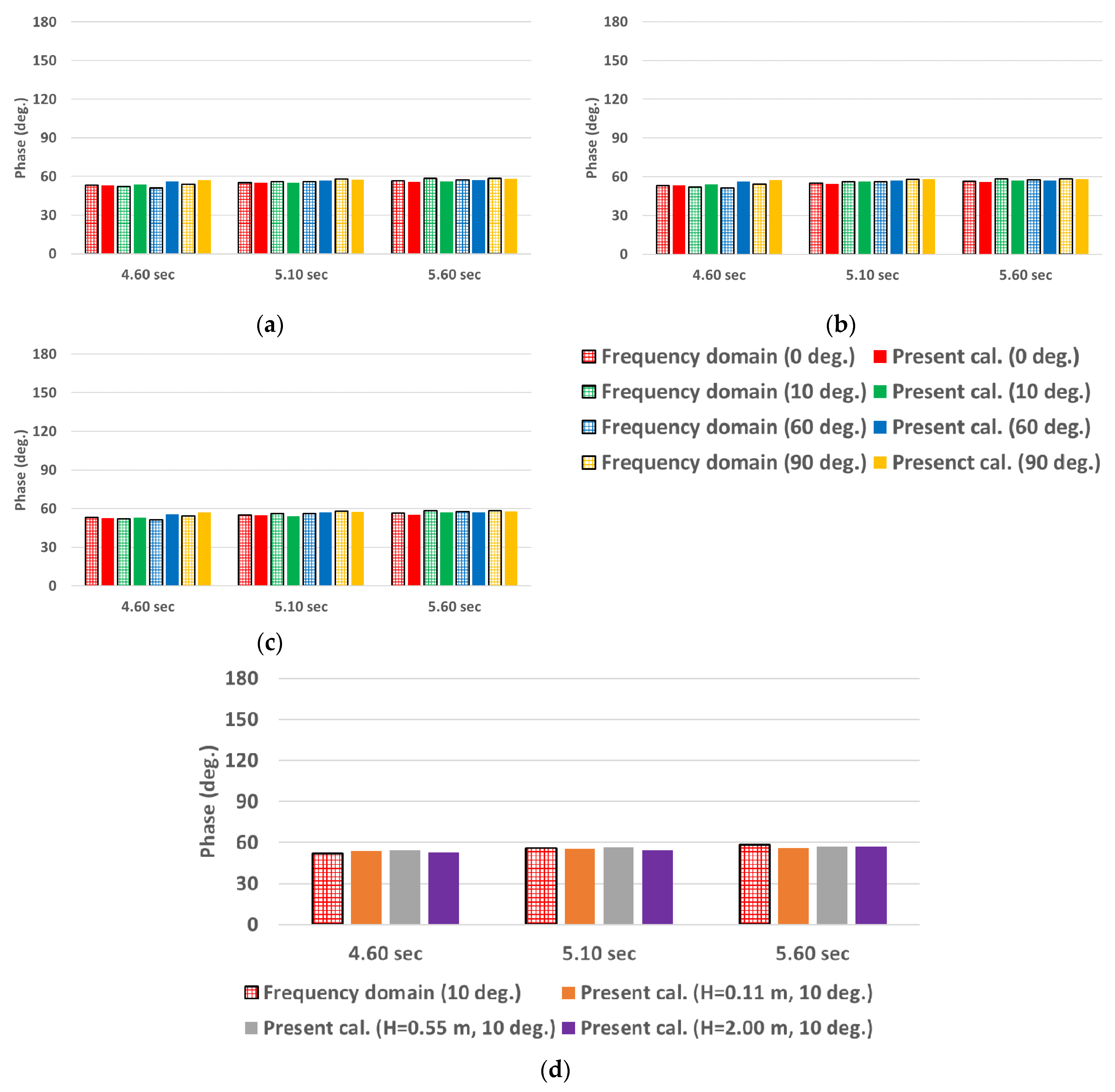
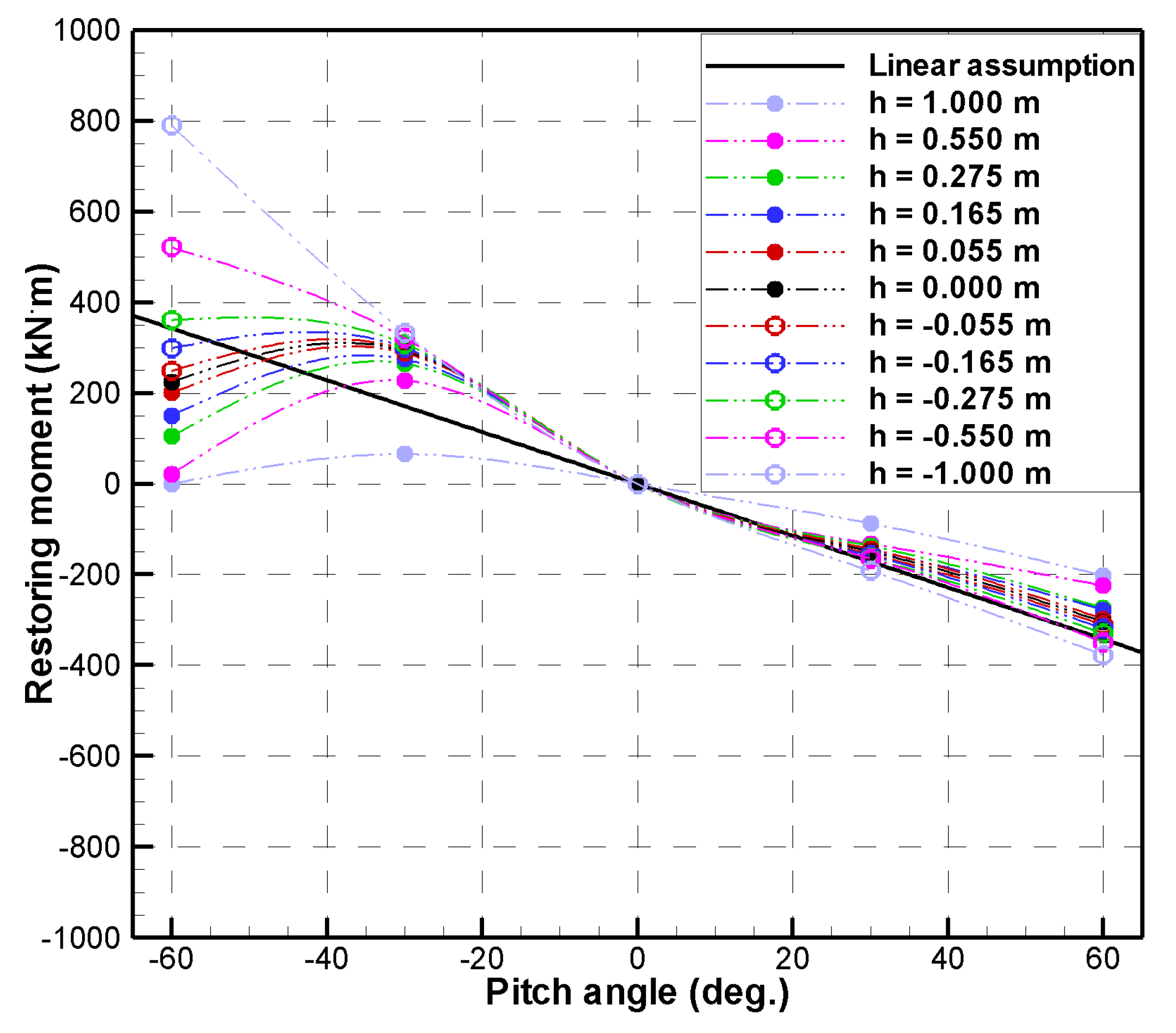
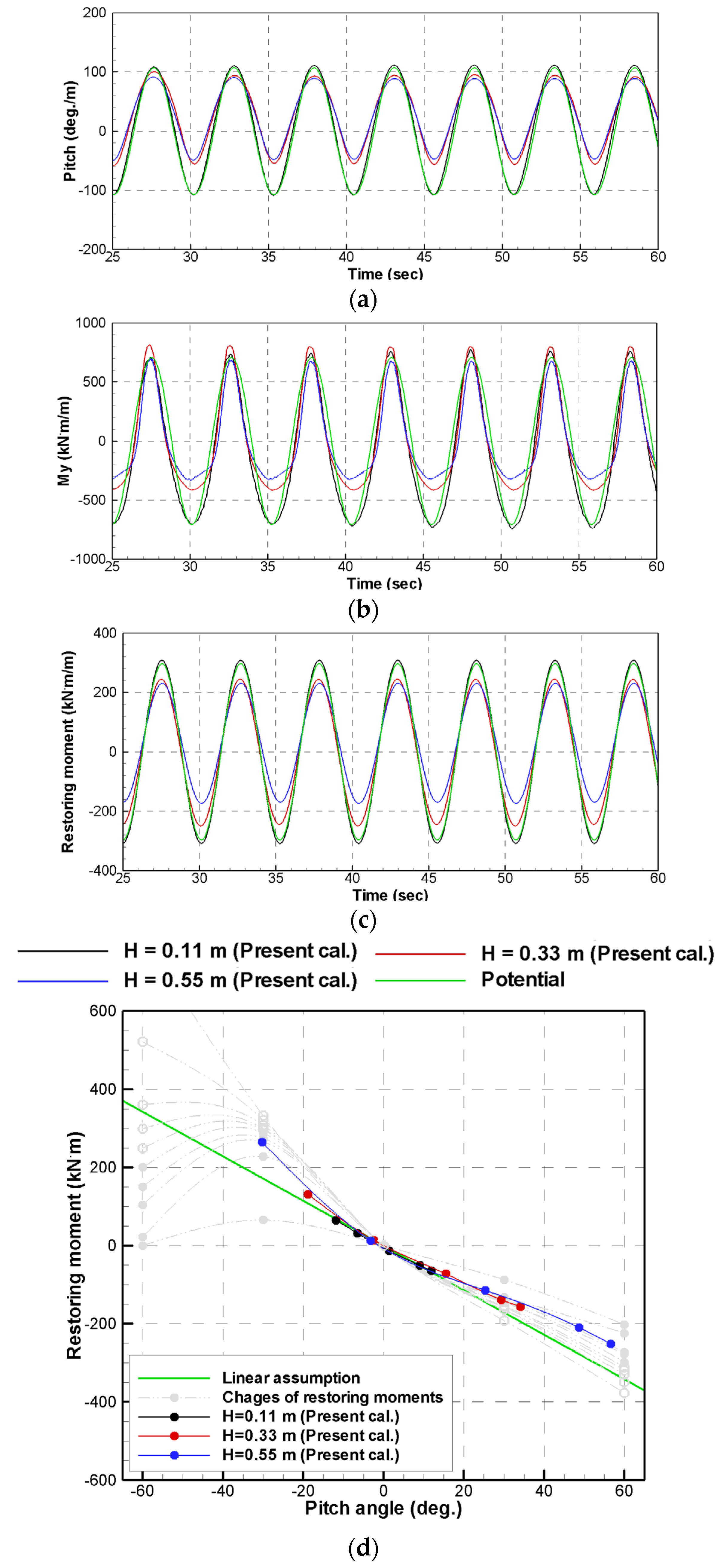
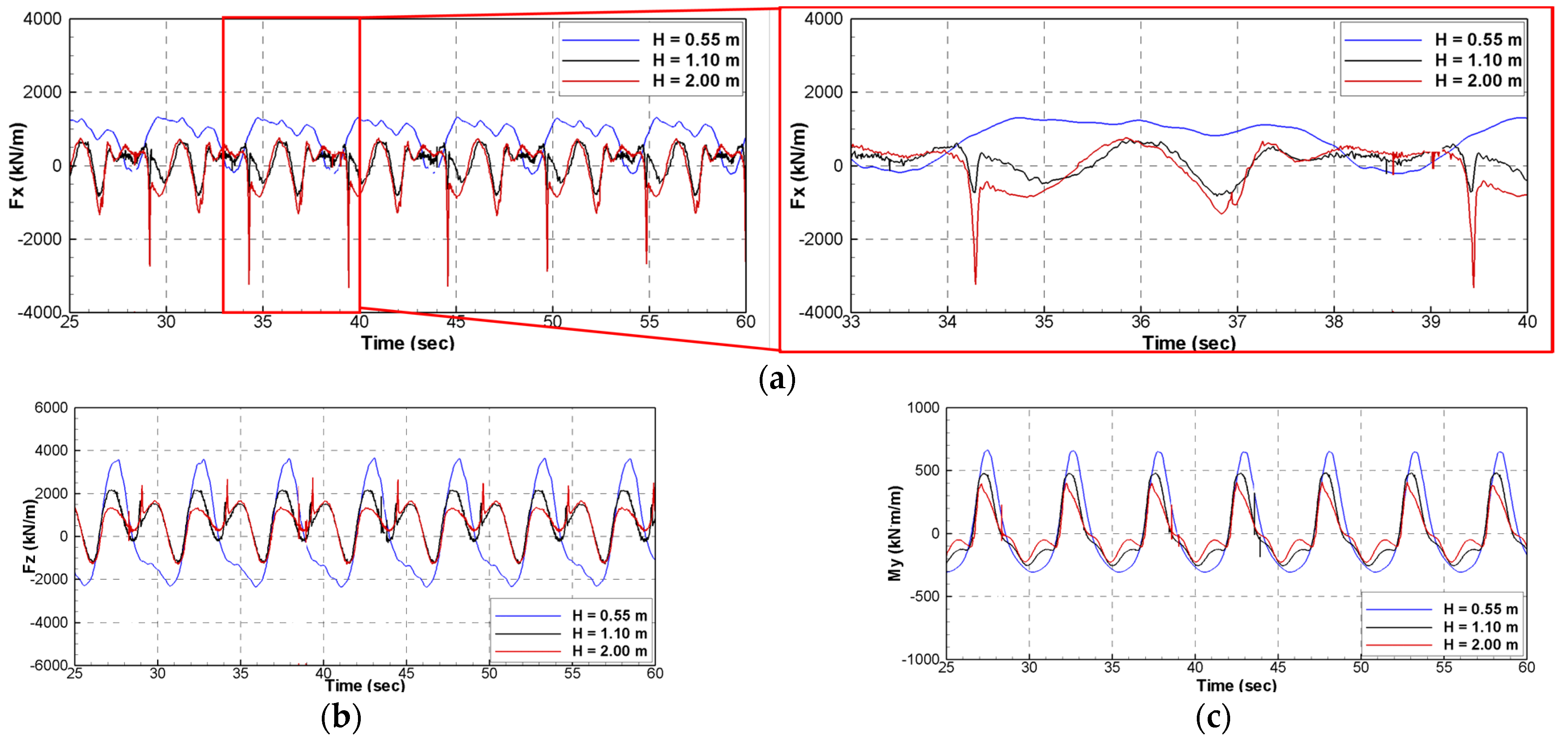
- Considering the pitch motion equation, the added moments of inertia, radiation damping, and wave exciting moments for relatively small pitch angles do not change considerably. However, the wave excitation moments can be changed at relatively large pitch angles. Furthermore, at relatively higher wave heights, the magnitudes of the normalized pitch motions and resonance periods are changed by changing the restoring moments. In addition, the pitch motions are affected by non-linear phenomena, such as wave runup and slamming, and it is difficult to estimate the pitch motions of the rotor using the linear potential theory.
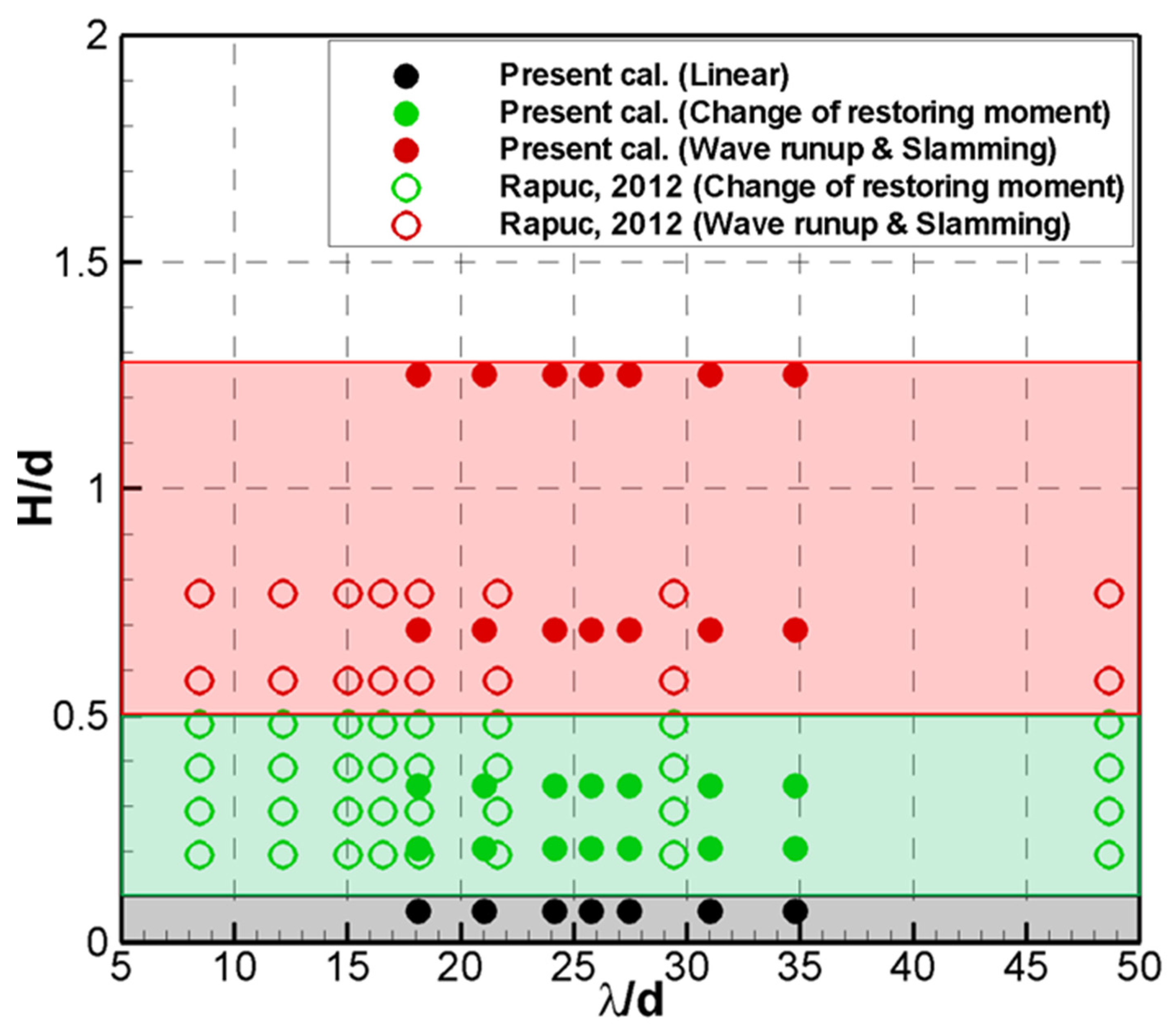
- According to the physical phenomena, the regions are classified into three types. In the case of H/d under 0.1, the linear potential theory, such as a frequency domain analysis, can be directly applied to estimate the pitch motions of the rotor. In H/d ranging from 0.1 to 0.5, a time-domain analysis could be used to estimate the pitch motions of the rotor by considering the changes in the restoring moments and wave exciting moments at large pitch angles. In addition, the time-domain analysis and a direct simulation using CFD could be used to estimate the pitch motions of the rotor. In the case of H/d over 0.5, where wave runup and slamming phenomena occur, CFD simulations should be used to estimate the pitch motions of the rotor.
- In this study, a selection method for an appropriate design tool was suggested to design a Salter’s duck-type rotor suitable for a sea. This method has several constraints; hence, it can be useful in the initial design phase for a Salter’s duck-type rotor. Therefore, the regions of H/d and λ/d, including a model condition, a tidal, a PTO damping, etc., will be modified. In the future, a guideline for a WEC design will be suggested, including stochastic results from irregular wave tests.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cho, C.H.; Lee, Y.H.; Kim, H.J.; Choi, Y.D.; Kim, B.S. Ocean Energy Engineering; Dasom: Siheung-si, Korea, 2006; pp. 154–169. [Google Scholar]
- Evans, D.V. A theory for wave-power absorption by oscillating bodies. J. Fluid. Mech. 1976, 77, 1–25. [Google Scholar] [CrossRef]
- Yeung, R.W. Added mass and damping of a vertical cylinder in finite-depth waters. Appl. Ocean Res. 1981, 3, 119–133. [Google Scholar] [CrossRef]
- Evans, D.V.; Mciver, P. Added mass and damping of a sphere section in heave. Appl. Ocean Res. 1984, 6, 45–53. [Google Scholar] [CrossRef]
- Evans, D.V. Maximum wave-power absorption under motion constraints. Appl. Ocean Res. 1981, 3, 200–203. [Google Scholar] [CrossRef]
- Budal, K.; Falnes, J. Wave power conversion by point absorbers: A Norwegian project. Int. J. Ambient Energy 1982, 3, 59–67. [Google Scholar] [CrossRef]
- Cummins, W.E. The impulse response function and ship motions. Schiffstechnik 1962, 47, 101–109. [Google Scholar]
- Falcão, A.F.O. Modelling and control of oscillating-body wave energy converters with hydraulic power take-off and gas accumulator. Ocean Eng. 2007, 34, 2021–2032. [Google Scholar] [CrossRef]
- Zurkinden, A.S.; Ferri, F.; Beatty, S.; Kofoed, J.P.; Kramer, M.M. Non-linear numerical modeling and experimental testing of a point absorber wave energy converter. Ocean Eng. 2014, 78, 11–21. [Google Scholar] [CrossRef]
- Do, H.T.; Dinh, Q.T.; Nguyen, M.T.; Phan, C.B.; Dang, T.D.; Lee, S.; Park, H.G.; Ahn, K.K. Effects of non-vertical linear motions of a hemispherical-float wave energy converter. Ocean Eng. 2015, 109, 430–438. [Google Scholar] [CrossRef]
- Gao, H.; Liang, R. Performance analysis of axisymmetric floating energy harvesters and influences of parameters and shape variation. Int. J. Energy Res. 2018, 43, 2057–2074. [Google Scholar] [CrossRef]
- Ransley, E.J. RANS-VOF Modelling of the Wavestar Point Absorber. Renewable Energy 2017, 49–65. [Google Scholar] [CrossRef] [Green Version]
- Windt, C.; Faedo, N.; García-Violini, D.; Peña-Sanchez, Y.; Davidson, J.; Ferri, F.; Ringwood, J.V. Validation of a CFD-based numerical wave tank model of the 1/20th scale wavestar wave energy converter. Fluids 2020, 5, 112. [Google Scholar] [CrossRef]
- Brito, M.; Canelas, R.B.; García-Feal, O.; Domínguez, J.M.; Crespo, A.J.C.; Ferreira, R.M.L.; Neves, M.G.; Teixeira, L. A numerical tool for modelling oscillating wave surge converter with nonlinear mechanical constraints. Renew. Energy 2020, 146, 2024–2043. [Google Scholar] [CrossRef]
- Brito, M.; Ferreira, R.M.L.; Teixeira, L.; Neves, M.G.; Canelas, R.B. Experimental investigation on the power capture of an oscillating wave surge converter in unidirectional waves. Renew. Energy 2020, 151, 975–992. [Google Scholar] [CrossRef]
- Salter, S.H. Wave power. Nature 1974, 249, 720–724. [Google Scholar] [CrossRef]
- Mynett, A.E.; Serman, D.D.; Mei, C.C. Characteristics of salter’s cam for extracting energy from ocean waves. Appl. Ocean Res. 1979, 1, 13–20. [Google Scholar] [CrossRef]
- Poguluri, S.K.; Bae, Y.H. A Study on performance assessment of WEC Rotor in the Jeju western waters. Ocean Syst. Eng. 2018, 8, 361–380. [Google Scholar]
- Rapuc, S. Numerical Study of the WEPTOS Single Rotor. Master’s Thesis, Aalborg University, Aalborg, Denmark, 2012. [Google Scholar]
- Pecher, A.; Kofoed, J.P.; Marchalot, T. Experimental Study on a Rotor for WEPTOS; DCE Contract Report No. 110; Aalborg University: Aalborg, Denmark, 2011. [Google Scholar]
- Pecher, A.; Kofoed, J.P.; Larsen, T.; Marchalot, T. Experimental study of the WEPTOS wave energy converter. In Proceedings of the 31st International Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012. [Google Scholar]
- Ko, H.S.; Kim, D.E.; Cho, I.H.; Bae, Y.H. Numerical and experimental study for nonlinear dynamic behavior of an asymmetric wave energy converter. In Proceedings of the 29th International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019; International Society of Offshore and Polar Engineering: Mountain View, CA, USA, 2019. [Google Scholar]
- Hwang, S.C.; Nam, B.W.; Ha, Y.J.; Kim, K.H.; Hong, S.Y.; Cho, S.K. Numerical Analysis on Sidewall Green Water Problem of a Ship-shaped FPSO in Bow Quartering Sea. In Proceedings of the 29th International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16–21 June 2019. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Prototype | |
|---|---|---|
| Scale ratio | 1/11 | |
| Beak angle (deg.) | 60 | |
| Inner hole radius (m) | 0.182 | 2.00 |
| Draft/Depth of rotating center (m) | 0.170 | 1.87 |
| Width (m) | 0.455 | 5.00 |
| Vertical distance between free-surface and rotating center (m) | 1.600 | 17.60 |
| CGX (m) | −0.0930 | −1.02 |
| CGZ (m) | 0.0998 | 1.10 |
| Mass (kg) | 13.6505 | 18,169 |
| IYY (kg m2) | 0.4934 | 7223.87 |
| Wave Period, T (s) | Wave Length (m) | kh | kH |
|---|---|---|---|
| 4.25 | 28.20 | 1.47 | 0.025 |
| 0.074 | |||
| 0.123 | |||
| 0.245 | |||
| 0.446 | |||
| 4.60 | 33.04 | 1.26 | 0.021 |
| 0.063 | |||
| 0.105 | |||
| 0.209 | |||
| 0.380 | |||
| 5.00 | 39.03 | 1.06 | 0.018 |
| 0.053 | |||
| 0.089 | |||
| 0.177 | |||
| 0.322 | |||
| 5.10 | 40.61 | 1.02 | 0.017 |
| 0.051 | |||
| 0.085 | |||
| 0.170 | |||
| 0.309 | |||
| 5.30 | 43.86 | 0.95 | 0.016 |
| 0.047 | |||
| 0.079 | |||
| 0.158 | |||
| 0.287 | |||
| 5.60 | 48.96 | 0.85 | 0.014 |
| 0.042 | |||
| 0.071 | |||
| 0.141 | |||
| 0.257 | |||
| 6.00 | 56.21 | 0.74 | 0.012 |
| 0.037 | |||
| 0.061 | |||
| 0.123 | |||
| 0.224 |
| Discretization Scheme | Finite Volume Method (FVM) |
|---|---|
| Pressure and velocity field | Semi-implicit method for pressure-linked equation (SIMPLE) |
| Time step | Adjustable time step (target CFL number = 0.5) |
| Sub-iterations | 10 |
| Convection schemes | Second-order upwind |
| Temporal schemes | Second-order |
| Turbulence model | (laminar) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, Y.-J.; Park, J.-Y.; Shin, S.-H. Numerical Study of Non-Linear Dynamic Behavior of an Asymmetric Rotor for Wave Energy Converter in Regular Waves. Processes 2021, 9, 1477. https://doi.org/10.3390/pr9081477
Ha Y-J, Park J-Y, Shin S-H. Numerical Study of Non-Linear Dynamic Behavior of an Asymmetric Rotor for Wave Energy Converter in Regular Waves. Processes. 2021; 9(8):1477. https://doi.org/10.3390/pr9081477
Chicago/Turabian StyleHa, Yoon-Jin, Ji-Yong Park, and Seung-Ho Shin. 2021. "Numerical Study of Non-Linear Dynamic Behavior of an Asymmetric Rotor for Wave Energy Converter in Regular Waves" Processes 9, no. 8: 1477. https://doi.org/10.3390/pr9081477
APA StyleHa, Y. -J., Park, J. -Y., & Shin, S. -H. (2021). Numerical Study of Non-Linear Dynamic Behavior of an Asymmetric Rotor for Wave Energy Converter in Regular Waves. Processes, 9(8), 1477. https://doi.org/10.3390/pr9081477