
Multiscale Analysis of Permeable and Impermeable Wall Models for Seawater Reverse Osmosis Desalination


Abstract
:1. Introduction
2. Mathematical Modeling
2.1. The Permeable and Impermeable Wall Models at a Sub-Millimeter Scale
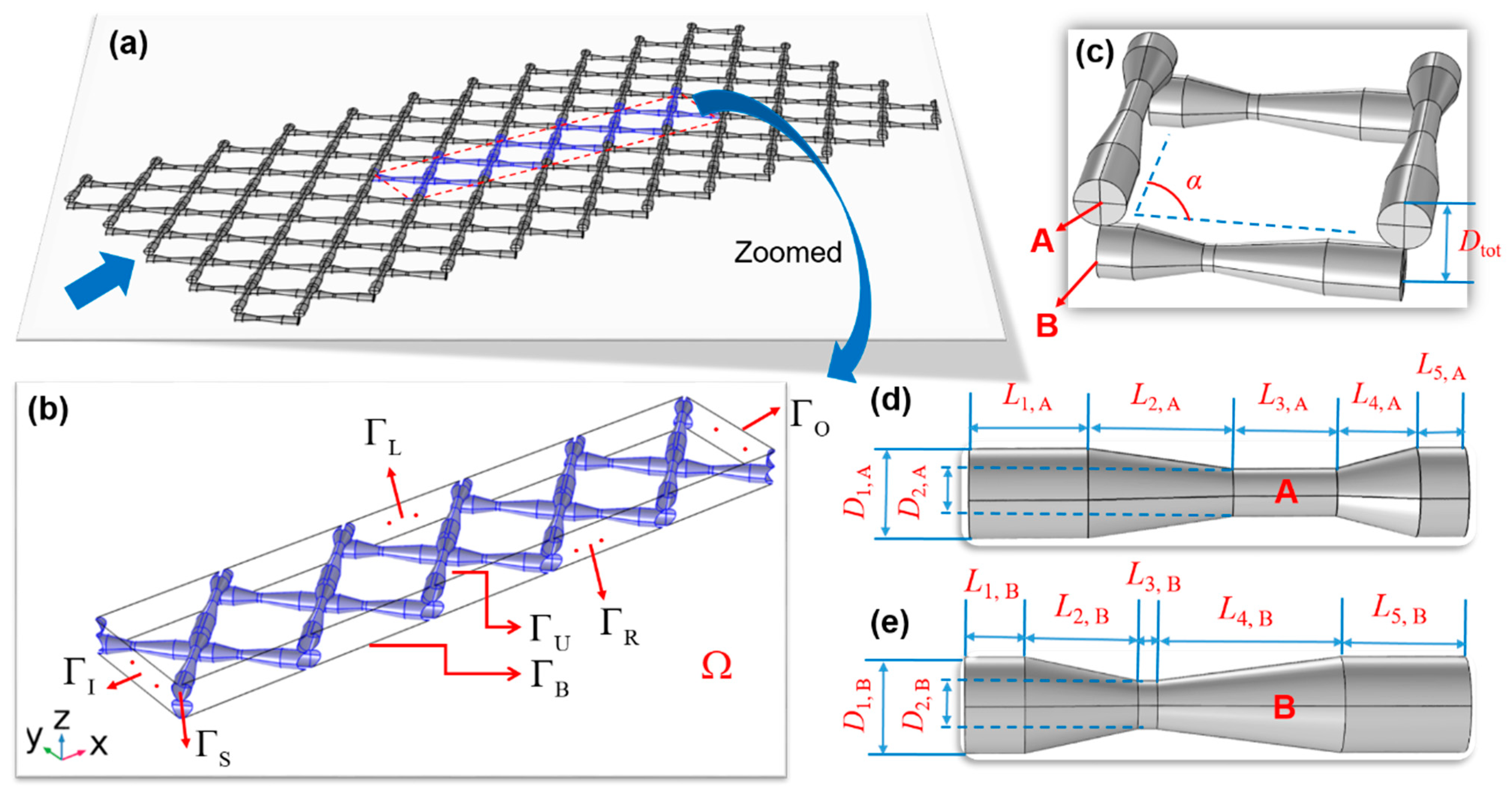
2.1.1. Problem Description
2.1.2. Boundary and Initial Conditions
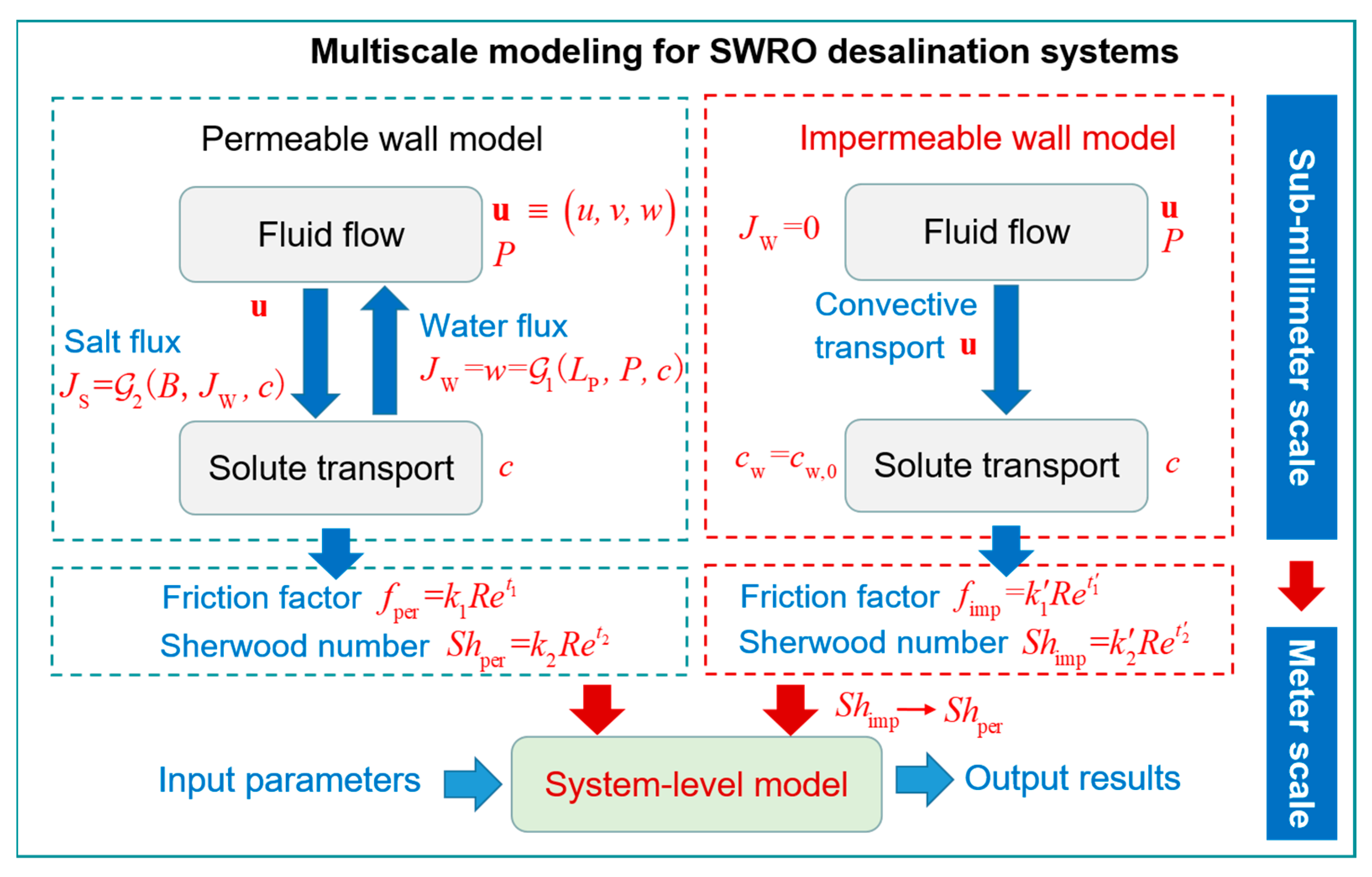
2.2. The Relations Coupling the CFD Model and System-Level Model
2.3. The System-Level Model for SWRO Desalination at a Meter Scale
3. Results and Discussion
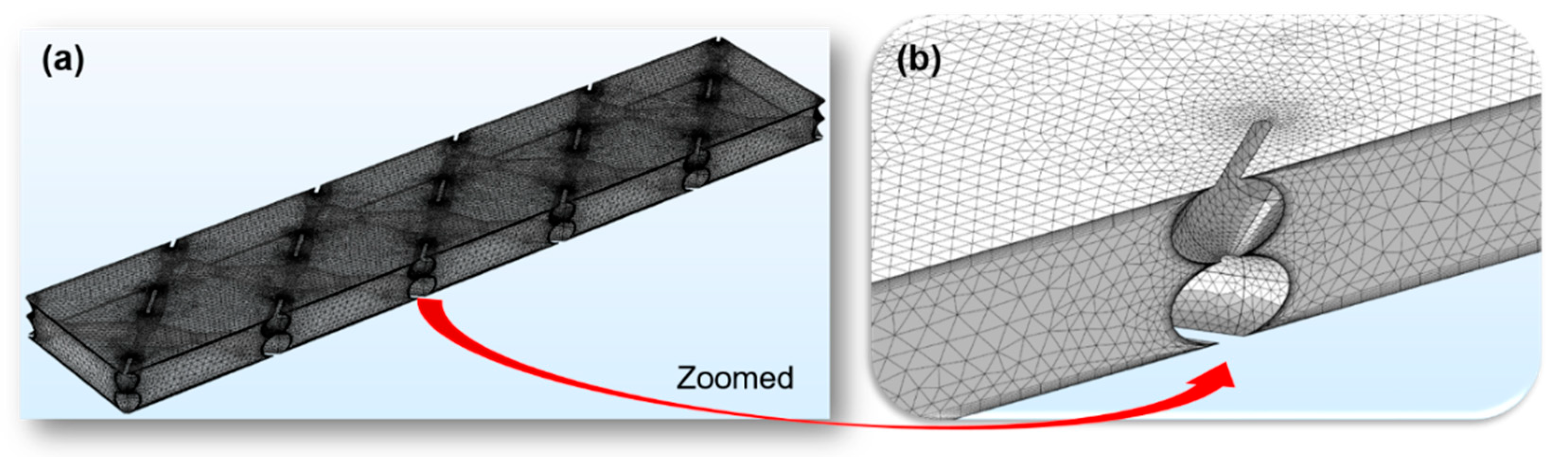
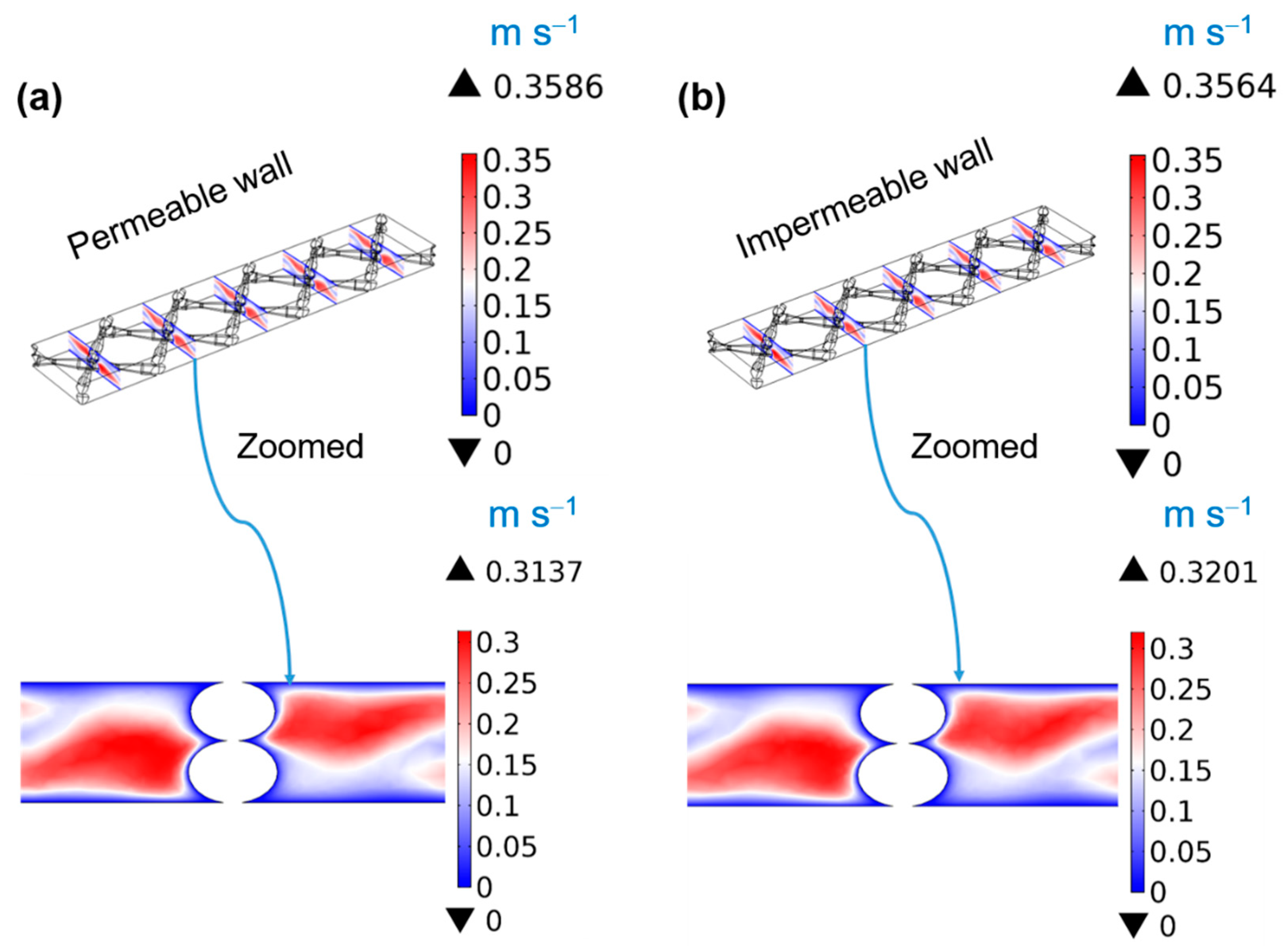
3.1. CFD Simulations
3.2. Performance Evaluations at a System-Level
4. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Anis, S.; Hashaikeh, R.; Hilal, N. Microfiltration membrane processes: A review of research trends over the past decade. J. Water Process. Eng. 2019, 32, 100941. [Google Scholar] [CrossRef]
- Mouiya, M.; Abourriche, A.; Bouazizi, A.; Benhammou, A.; El Hafiane, Y.; Abouliatim, Y.; Nibou, L.; Oumam, M.; Ouammou, M.; Smith, A.; et al. Flat ceramic microfiltration membrane based on natural clay and Moroccan phosphate for desalination and industrial wastewater treatment. Desalination 2018, 427, 42–50. [Google Scholar] [CrossRef]
- Al Aani, S.; Mustafa, T.; Hilal, N. Ultrafiltration membranes for wastewater and water process engineering: A comprehensive statistical review over the past decade. J. Water Process. Eng. 2020, 35, 101241. [Google Scholar] [CrossRef]
- Brover, S.; Lester, Y.; Brenner, A.; Sahar-Hadar, E. Optimization of ultrafiltration as pre-treatment for seawater RO desalination. Desalination 2022, 524, 115478. [Google Scholar] [CrossRef]
- Zhou, D.; Zhu, L.; Fu, Y.; Zhu, M.; Xue, L. Development of lower cost seawater desalination processes using nanofiltration technologies—A review. Desalination 2015, 376, 109–116. [Google Scholar] [CrossRef]
- Wafi, M.; Hussain, N.; Abdalla, O.E.-S.; Al-Far, M.; Al-Hajaj, N.; Alzonnikah, K. Nanofiltration as a cost-saving desalination process. SN Appl. Sci. 2019, 1, 751. [Google Scholar] [CrossRef] [Green Version]
- Qasim, M.; Badrelzaman, M.; Darwish, N.; Darwish, N.; Hilal, N. Reverse osmosis desalination: A state-of-the-art review. Desalination 2019, 459, 59–104. [Google Scholar] [CrossRef] [Green Version]
- Lim, Y.; Goh, K.; Kurihara, M.; Wang, R. Seawater desalination by reverse osmosis: Current development and future challenges in membrane fabrication—A review. J. Membr. Sci. 2021, 629, 119292. [Google Scholar] [CrossRef]
- Galama, A.; Saakes, M.; Bruning, H.; Rijnaarts, H.; Post, J. Seawater predesalination with electrodialysis. Desalination 2014, 342, 61–69. [Google Scholar] [CrossRef]
- Al-Amshawee, S.; Yunus, M.; Azoddein, A.; Hassell, D.; Dakhil, I.; Hasan, H. Electrodialysis desalination for water and wastewater: A review. Chem. Eng. J. 2020, 380, 122231. [Google Scholar] [CrossRef]
- Yadav, A.; Labhasetwar, P.; Shahi, V. Membrane distillation using low-grade energy for desalination: A review. J. Environ. Chem. Eng. 2021, 9, 105818. [Google Scholar] [CrossRef]
- Yadav, A.; Patel, R.; Singh, C.; Labhasetwar, P.; Shahi, V. Experimental study and numerical optimization for removal of methyl orange using polytetrafluoroethylene membranes in vacuum membrane distillation process. Colloids Surf. A Physicochem. Eng. Asp. 2022, 635, 128070. [Google Scholar] [CrossRef]
- Feinberg, B.; Ramon, G.; Hoek, E. Thermodynamic analysis of osmotic energy recovery at a reverse osmosis desalination plant. Environ. Sci. Technol. 2013, 47, 2982–2989. [Google Scholar] [CrossRef] [PubMed]
- Lim, Y.; Ma, Y.; Chew, J.; Wang, R. Assessing the potential of highly permeable reverse osmosis membranes for desalination: Specific energy and footprint analysis. Desalination 2022, 533, 115771. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Y.; Luo, L.; Li, G.; Li, Y.; Hu, H. Application of disk tube reverse osmosis in wastewater treatment: A review. Sci. Total Environ. 2021, 792, 148291. [Google Scholar] [CrossRef] [PubMed]
- Colla, V.; Branca, T.; Rosito, F.; Lucca, C.; Vivas, B.; Delmiro, V. Sustainable Reverse Osmosis application for wastewater treatment in the steel industry. J. Clean. Prod. 2016, 130, 103–115. [Google Scholar] [CrossRef]
- Licona, K.; Geaquinto, L.; Nicolini, J.; Figueiredo, N.; Chiapetta, S.; Habert, A.; Yokoyama, L. Assessing potential of nanofiltration and reverse osmosis for removal of toxic pharmaceuticals from water. J. Water Process. Eng. 2018, 25, 195–204. [Google Scholar] [CrossRef]
- Lin, Y.; Chiou, J.; Lee, C. Effect of silica fouling on the removal of pharmaceuticals and personal care products by nanofiltration and reverse osmosis membranes. J. Hazard. Mater. 2014, 277, 102–109. [Google Scholar] [CrossRef]
- Bejaoui, I.; Mnif, A.; Hamrouni, B. Performance of Reverse Osmosis and Nanofiltration in the Removal of Fluoride from Model Water and Metal Packaging Industrial Effluent. Sep. Sci. Technol. 2014, 49, 1135–1145. [Google Scholar] [CrossRef]
- Ndiaye, P.; Moulin, P.; Dominguez, L.; Millet, J.; Charbit, F. Removal of fluoride from electronic industrial effluent by RO membrane separation. Desalination 2005, 173, 25–32. [Google Scholar] [CrossRef]
- Zhao, D.; Japip, S.; Zhang, Y.; Weber, M.; Maletzko, C.; Chung, T. Emerging thin-film nanocomposite (TFN) membranes for reverse osmosis: A review. Water Res. 2020, 173, 115557. [Google Scholar] [CrossRef]
- Rahmawati, R.; Bilad, M.; Nawi, N.; Wibisono, Y.; Suhaimi, H.; Shamsuddin, N.; Arahman, N. Engineered spacers for fouling mitigation in pressure driven membrane processes: Progress and projection. J. Environ. Chem. Eng. 2021, 9, 106285. [Google Scholar] [CrossRef]
- Lin, W.; Zhang, Y.; Li, D.; Wang, X.; Huang, X. Roles and performance enhancement of feed spacer in spiral wound membrane modules for water treatment: A 20-year review on research evolvement. Water Res. 2021, 198, 117146. [Google Scholar] [CrossRef]
- Fimbres-Weihs, G.; Wiley, D. Review of 3D CFD modeling of flow and mass transfer in narrow spacer-filled channels in membrane modules. Chem. Eng. Process. 2010, 49, 759–781. [Google Scholar] [CrossRef]
- Anqi, A.; Alkhamis, N.; Oztekin, A. Computational study of desalination by reverse osmosis—Three-dimensional analyses. Desalination 2016, 388, 38–49. [Google Scholar] [CrossRef]
- Lin, W.; Shao, R.; Wang, X.; Huang, X. Impacts of non-uniform filament feed spacers characteristics on the hydraulic and anti-fouling performances in the spacer-filled membrane channels: Experiment and numerical simulation. Water Res. 2020, 185, 116251. [Google Scholar] [CrossRef] [PubMed]
- Foo, K.; Liang, Y.; Weihs, G. CFD study of the effect of SWM feed spacer geometry on mass transfer enhancement driven by forced transient slip velocity. J. Membr. Sci. 2020, 597, 117643. [Google Scholar] [CrossRef]
- Singh, C.; Yadav, A.; Kumar, A. Numerical simulations of the effect of spacer filament geometry and orientation on the performance of the reverse osmosis process. Colloid. Surface A 2022, 650, 129664. [Google Scholar] [CrossRef]
- Li, M.; Bui, T.; Chao, S. Three-dimensional CFD analysis of hydrodynamics and concentration polarization in an industrial RO feed channel. Desalination 2016, 397, 194–204. [Google Scholar] [CrossRef]
- Lin, W.; Lei, J.; Wang, Q.; Wang, X.-m.; Huang, X. Performance enhancement of spiral-wound reverse osmosis membrane elements with novel diagonal-flow feed channels. Desalination 2022, 523, 115447. [Google Scholar] [CrossRef]
- Yadav, A.; Singh, C.; Patel, R.; Kumar, A.; Labhasetwar, P. Investigations on the effect of spacer in direct contact and air gap membrane distillation using computational fluid dynamics. Colloids Surf. A Physicochem. Eng. Asp. 2022, 654, 130111. [Google Scholar] [CrossRef]
- Koutsou, C.; Yiantsios, S.; Karabelas, A. A numerical and experimental study of mass transfer in spacer-filled channels: Effects of spacer geometrical characteristics and Schmidt number. J. Membr. Sci. 2009, 326, 234–251. [Google Scholar] [CrossRef]
- Completo, C.; Semiao, V.; Geraldes, V. Efficient CFD-based method for designing cross-flow nanofiltration small devices. J. Membr. Sci. 2016, 500, 190–202. [Google Scholar] [CrossRef]
- Fimbres-Weihs, G.; Wiley, D. Numerical study of mass transfer in three-dimensional spacer-filled narrow channels with steady flow. J. Membr. Sci. 2007, 306, 228–243. [Google Scholar] [CrossRef]
- Shakaib, M.; Hasani, S.; Mahmood, M. CFD modeling for flow and mass transfer in spacer-obstructed membrane feed channels. J. Membr. Sci. 2009, 326, 270–284. [Google Scholar] [CrossRef]
- Liang, Y.; Toh, K.; Weihs, G.F. 3D CFD study of the effect of multi-layer spacers on membrane performance under steady flow. J. Membr. Sci. 2019, 580, 256–267. [Google Scholar] [CrossRef]
- Toh, K.; Liang, Y.; Lau, W.; Weihs, G. The techno-economic case for coupling advanced spacers to high-permeance RO membranes for desalination. Desalination 2020, 491, 114534. [Google Scholar] [CrossRef]
- Geraldes, V.; Afonso, M. Generalized mass-transfer correction factor for nanofiltration and reverse osmosis. AIChE J. 2006, 52, 3353–3362. [Google Scholar] [CrossRef]
- Luo, J.; Li, M.; Heng, Y. A hybrid modeling approach for optimal design of non-woven membrane channels in brackish water reverse osmosis process with high-throughput computation. Desalination 2020, 489, 114463. [Google Scholar] [CrossRef]
- Chen, Q.; Luo, J.; Heng, Y. High-Throughput Optimal Design of Spacers Using Triply Periodic Minimal Surfaces in BWRO. Separations 2022, 9, 62. [Google Scholar] [CrossRef]
- Gu, J.; Luo, J.; Li, M.; Huang, C.; Heng, Y. Modeling of pressure drop in reverse osmosis feed channels using multilayer artificial neural networks. Chem. Eng. Res. Des. 2020, 159, 146–156. [Google Scholar] [CrossRef]
- Luo, J.; Li, M.; Hoek, E.; Heng, Y. Supercomputing and machine learning-aided optimal design of high permeability seawater reverse osmosis membrane systems. Sci. Bull. 2023, in press. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Meindersma, W.; Haan, A.; Reith, T. Optimization of commercial net spacers in spiral wound membrane modules. J. Membr. Sci. 2002, 208, 289–302. [Google Scholar] [CrossRef] [Green Version]
- Bucs, S.; Radu, A.; Lavric, V.; Vrouwenvelder, J.; Picioreanu, C. Effect of different commercial feed spacers on biofouling of reverse osmosis membrane systems: A numerical study. Desalination 2014, 343, 26–37. [Google Scholar] [CrossRef]
- Al-Amoudi, A.; Lovitt, R. Fouling strategies and the cleaning system of NF membranes and factors affecting cleaning efficiency. J. Membr. Sci. 2007, 303, 4–28. [Google Scholar] [CrossRef]
- Zamani, F.; Chew, J.; Akhondi, E.; Krantz, W.; Fane, A. Unsteady-state shear strategies to enhance mass-transfer for the implementation of ultrapermeable membranes in reverse osmosis: A review. Desalination 2015, 356, 328–348. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometrical Parameters | Value | |
|---|---|---|
| Spacer unit | (μm) | 234 |
| (μm) | 389 | |
| (μm) | 500 | |
| (μm) | 696 | |
| (μm) | 566 | |
| (μm) | 281 | |
| (μm) | 535 | |
| (μm) | 92 | |
| (μm) | 878 | |
| (μm) | 599 | |
| (μm) | 422 | |
| (μm) | 223 | |
| (μm) | 445 | |
| (μm) | 223 | |
| (μm) | 863 | |
| (°) | 90 | |
| Computational domain | Length, (mm) | 16.864 |
| Width, (mm) | 3.3729 | |
| Height, (mm) | 0.853 | |
| Porosity, (-) | 0.90 | |
| Hydraulic diameter, (mm) | 1.058 | |
| Input Parameters | Value | |
|---|---|---|
| Operating conditions | Inlet transmembrane pressure, (bar) | 60 |
| Inlet average velocity magnitude, (m s−1) | 0.2 | |
| Properties of feed solute | Feed salinity, (ppm) | 35,000 |
| Density, (kg m−3) | 1021 | |
| Viscosity, (Pa s) | 9.41 × 10−4 | |
| Diffusion coefficient, (m2 s−1) | 1.45 × 10−9 | |
| Reflection coefficient, (−) | 1 | |
| Osmotic pressure coefficient, (bar) | 805.1 | |
| Membrane properties | Water permeability, (L m−2 h−1 bar−1) | 1 (Case1); 3 (Case 2); 5 (Case 3); 10 (Case 4) |
| Salt permeability, (L m−2 h−1) | 0.05 | |
| Membrane module parameters | Module length parallel to flow, (m) | 1 |
| Module length perpendicular to flow, (m) | 1 | |
| Number of feed spacers per element, | 23 | |
| Membrane area per membrane module, (m2) | 37.2 | |
| Module configurations | Number of membrane elements per pressure vessel, | 8 (Case1); 5 (Case 2); 3 (Case 3); 2 (Case 4) |
| Number of pressure vessels, | 30 | |
| Efficiencies | Efficiency of high-pressure pump, (−) | 0.85 |
| Efficiency of energy recovery device, (−) | 0.95 | |
| Output Results | Value | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | |||||||||
| M1 | M2 | Error | M1 | M2 | Error | M1 | M2 | Error | M1 | M2 | Error | |
| (ppm) | 138 | 139 | 0.55% | 88 | 89 | 0.79% | 56 | 56 | 1.22% | 40 | 40 | 1.47% |
| (L m−2 h−1) | 18.4 | 18.3 | 0.38% | 34.1 | 33.9 | 0.64% | 54.5 | 54.0 | 0.99% | 81.0 | 79.9 | 1.26% |
| max (CPF) (−) | 1.08 | 1.08 | 0.32% | 1.21 | 1.21 | 0.04% | 1.32 | 1.31 | 0.65% | 1.50 | 1.48 | 1.86% |
| (−) | 0.43 | 0.43 | 0.38% | 0.50 | 0.49 | 0.64% | 0.48 | 0.47 | 0.99% | 0.47 | 0.47 | 1.26% |
| (m3 h−1) | 164 | 164 | 0.38% | 190 | 189 | 0.64% | 182 | 181 | 0.99% | 181 | 178 | 1.26% |
| (kWh m−3) | 2.17 | 2.17 | 0.06% | 2.11 | 2.11 | 0.08% | 2.12 | 2.12 | 0.12% | 2.11 | 2.12 | 0.14% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Q.; Heng, Y.; Jiang, Y.; Luo, J. Multiscale Analysis of Permeable and Impermeable Wall Models for Seawater Reverse Osmosis Desalination. Separations 2023, 10, 134. https://doi.org/10.3390/separations10020134
Yang Q, Heng Y, Jiang Y, Luo J. Multiscale Analysis of Permeable and Impermeable Wall Models for Seawater Reverse Osmosis Desalination. Separations. 2023; 10(2):134. https://doi.org/10.3390/separations10020134
Chicago/Turabian StyleYang, Qingqing, Yi Heng, Ying Jiang, and Jiu Luo. 2023. "Multiscale Analysis of Permeable and Impermeable Wall Models for Seawater Reverse Osmosis Desalination" Separations 10, no. 2: 134. https://doi.org/10.3390/separations10020134
APA StyleYang, Q., Heng, Y., Jiang, Y., & Luo, J. (2023). Multiscale Analysis of Permeable and Impermeable Wall Models for Seawater Reverse Osmosis Desalination. Separations, 10(2), 134. https://doi.org/10.3390/separations10020134