A Continuous Model of Marital Relations with Stochastic Differential Equations



Abstract
:1. Introduction
1.1. Continuous Model
Deterministic Case
1.2. Stochastic Model
2. Analysis of the Deterministic Case
Qualitative Analysis for the Bilinear Influence Function
- (1)
- A saddle point if:
- (2)
- A node if:It will be stable if or unstable if .
- (3)
- A spiral if:it will be stable if and unstable if .
- (4)
- A center if:
- (5)
- A proper or improper node if:
- (i)
- Saddle points (and therefore unstable) if and only if , and or
- (ii)
- Stable nodes if and only if and .
3. Numerical Simulations
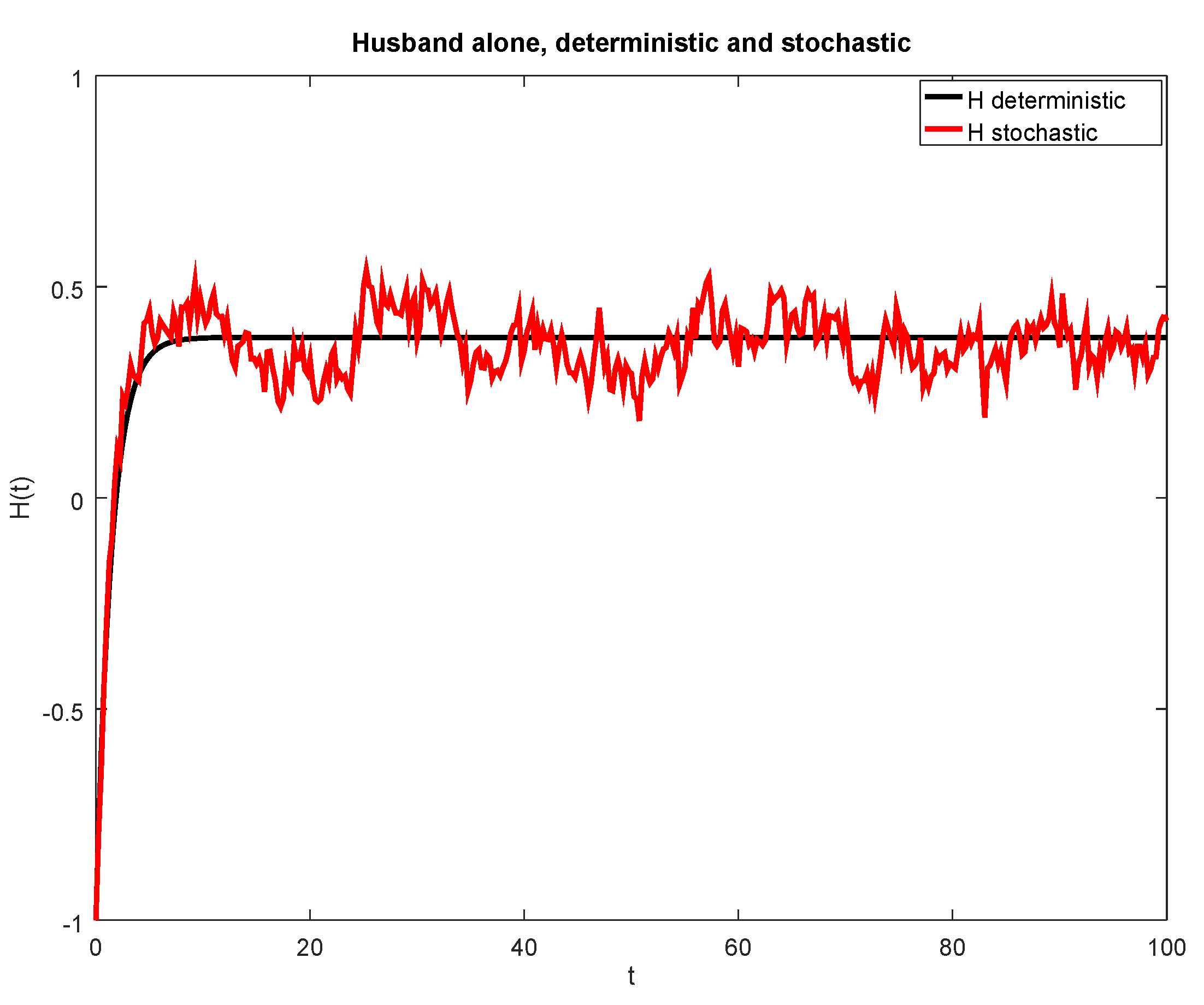
3.1. Single Individual with Validating Personality
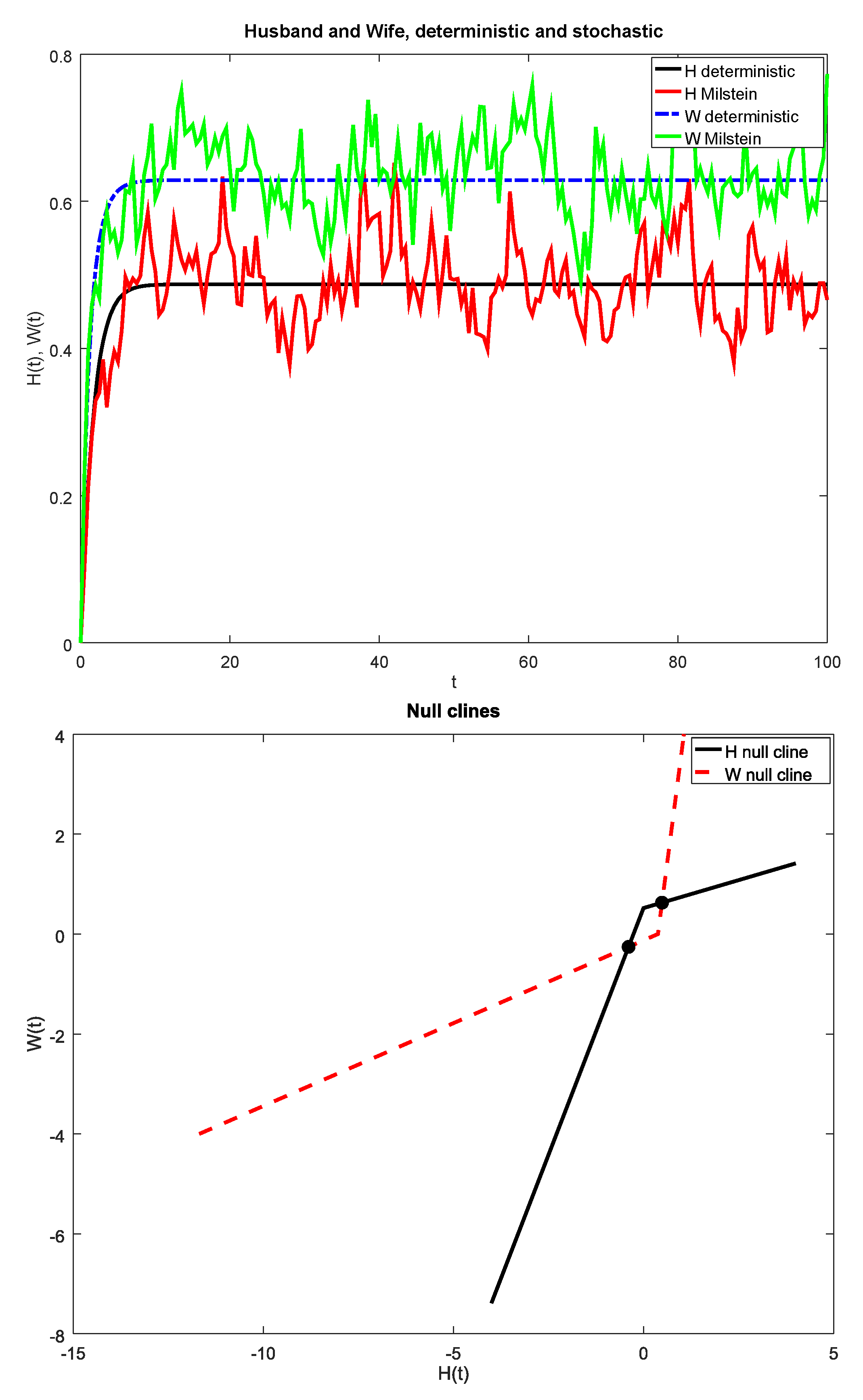
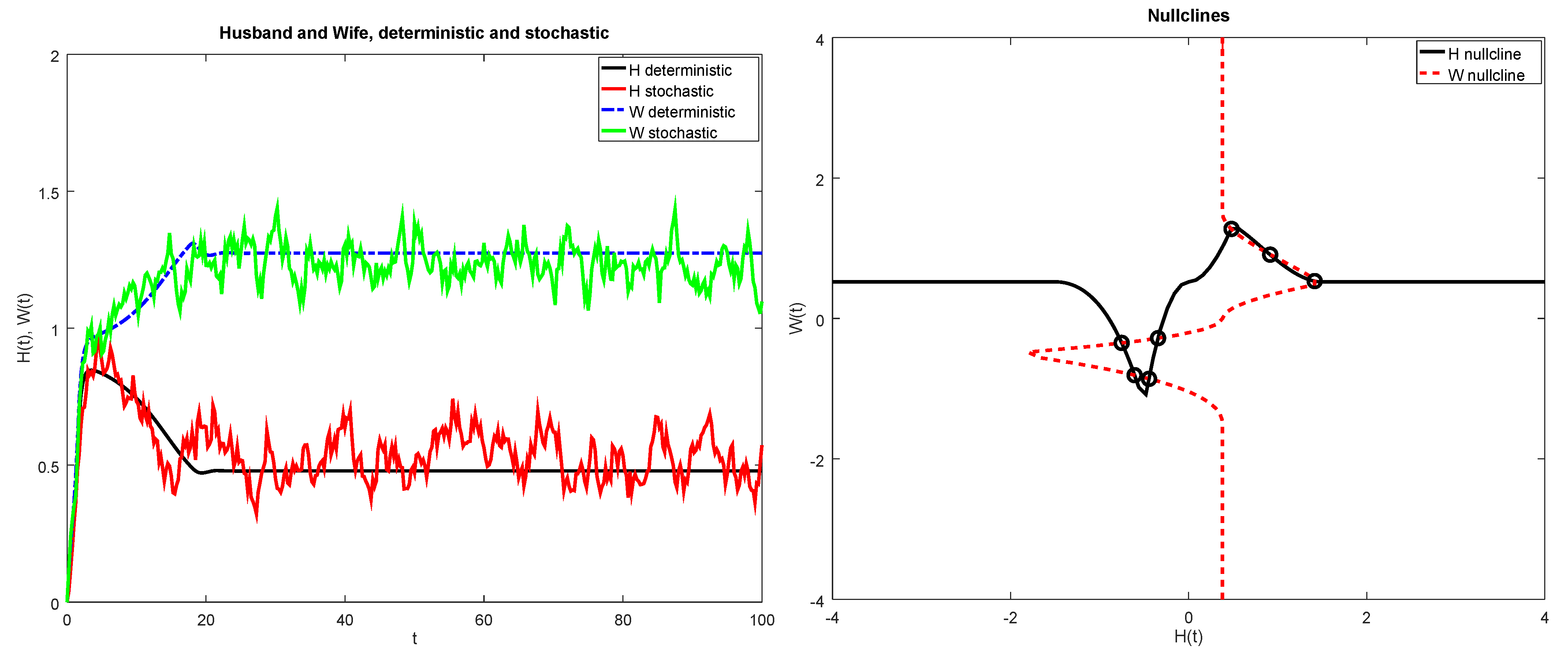
3.2. Validating Wife and Husband with Bilinear Influence Function
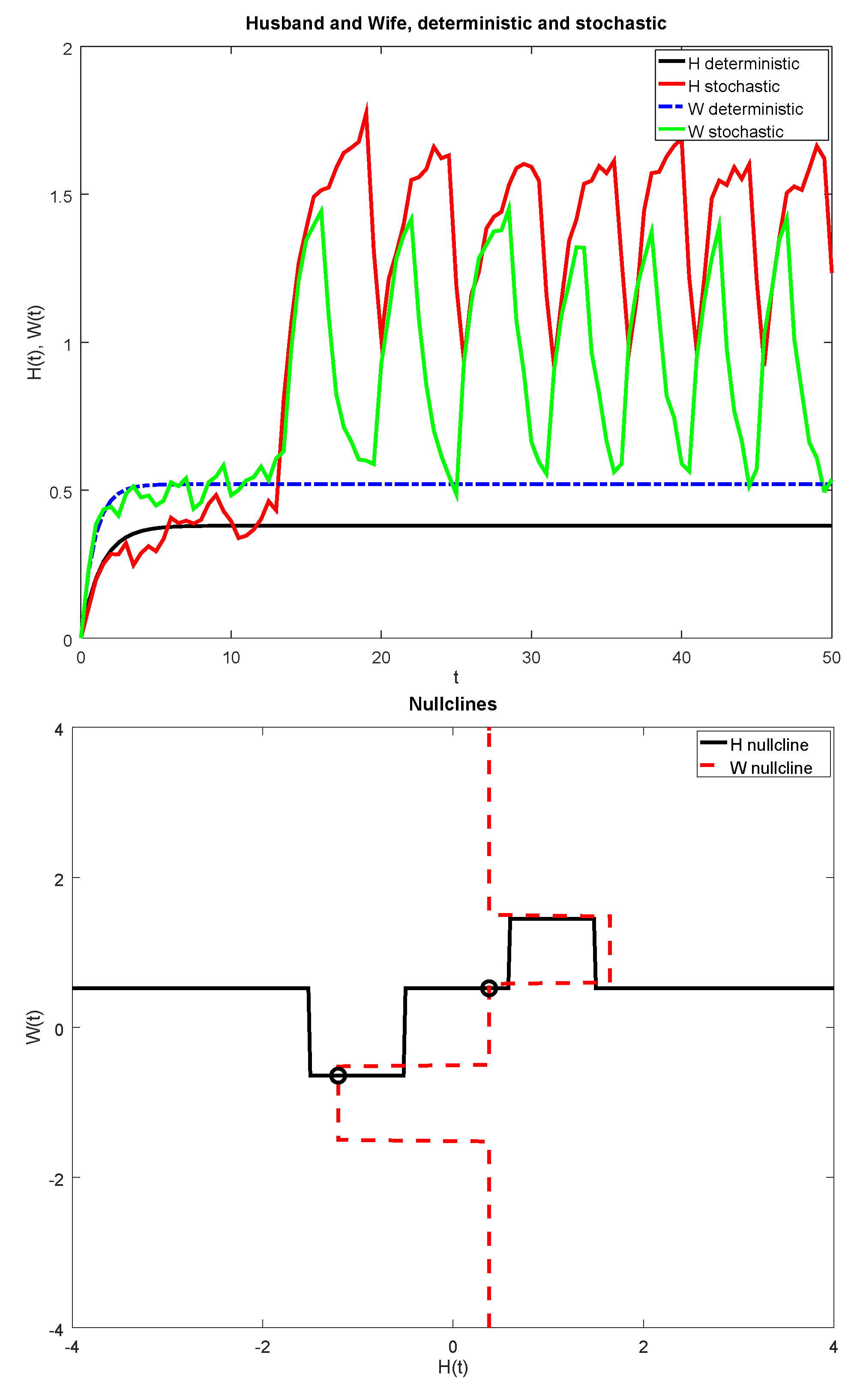
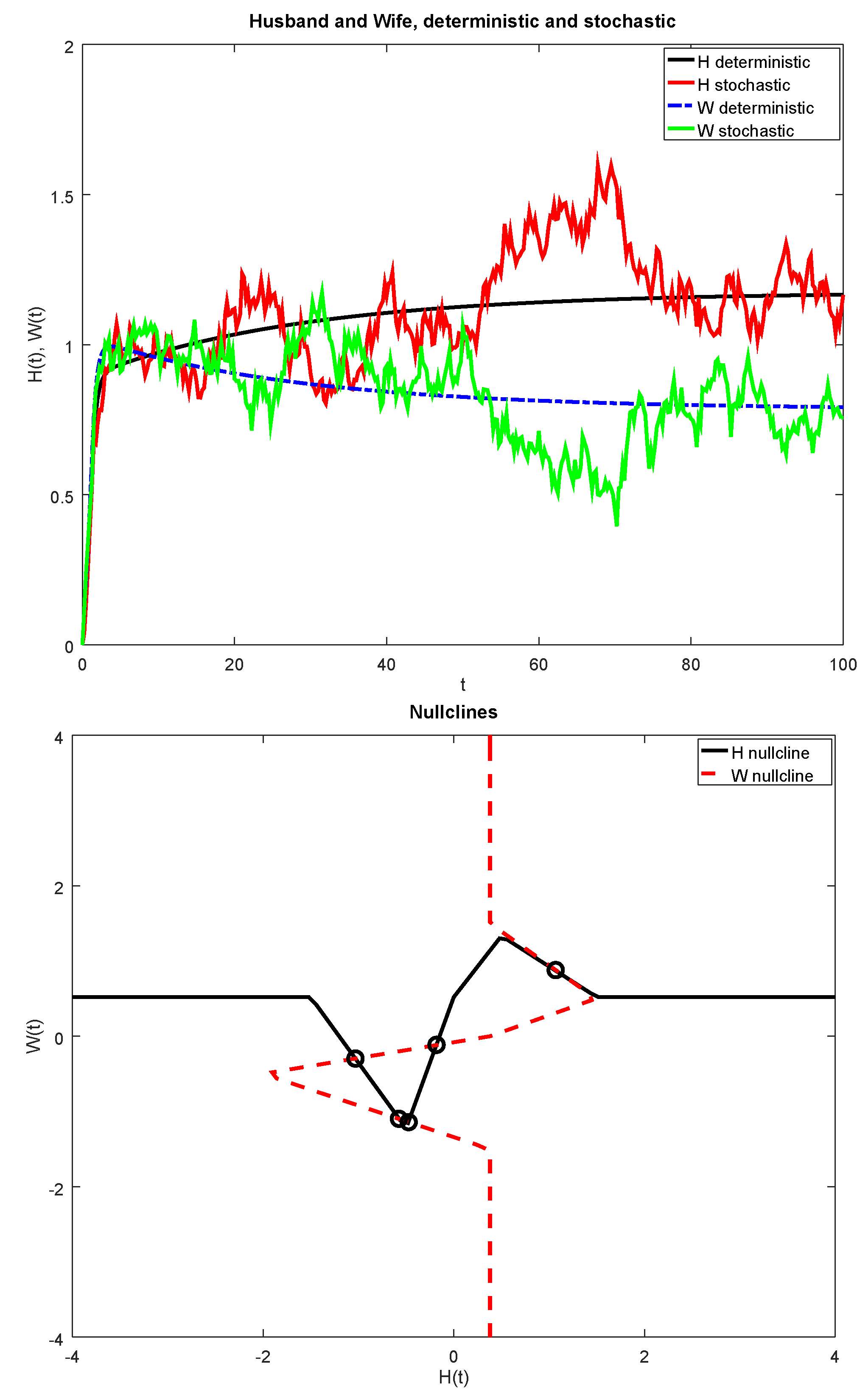
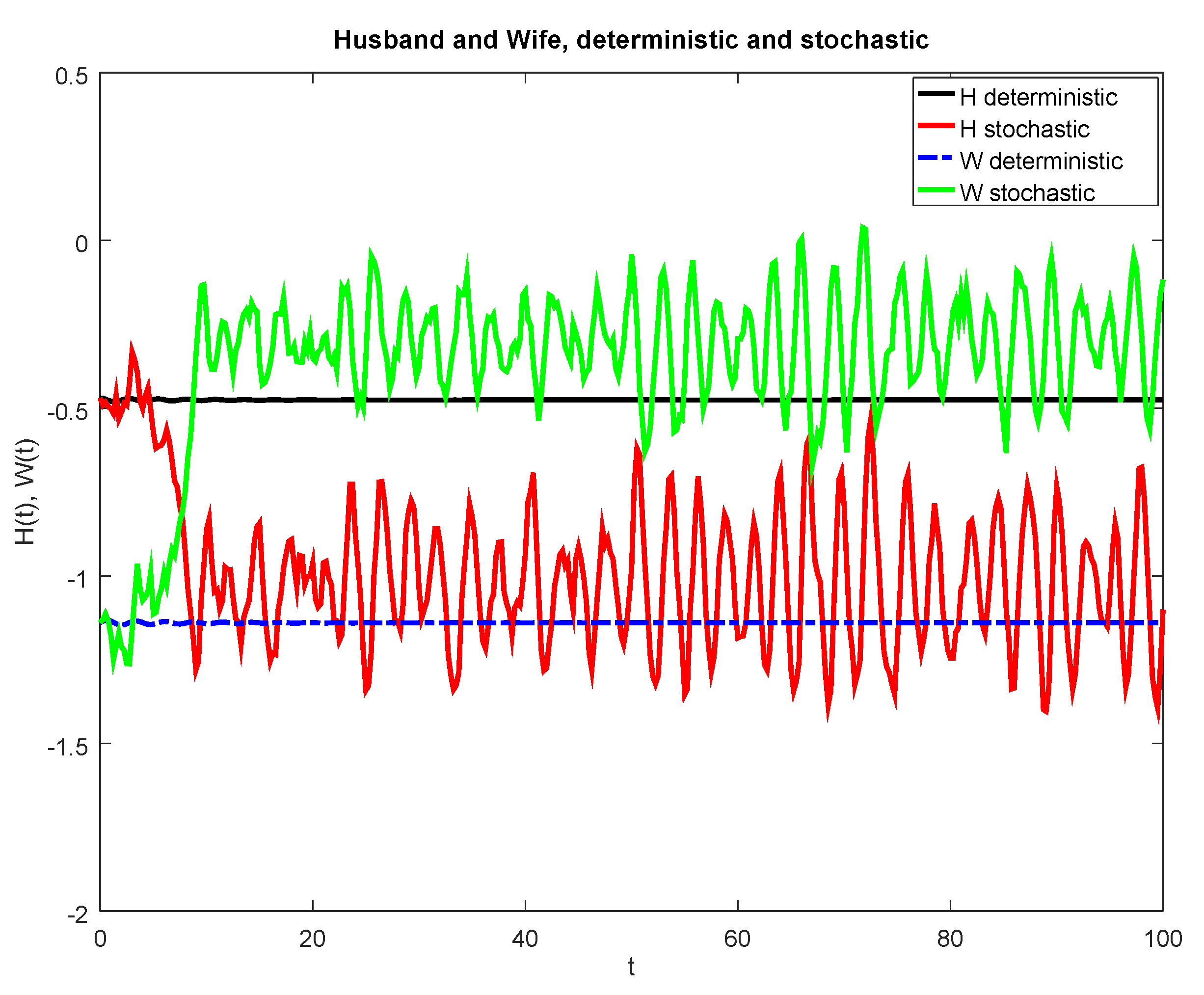
3.3. Piece-Wise Influence Function
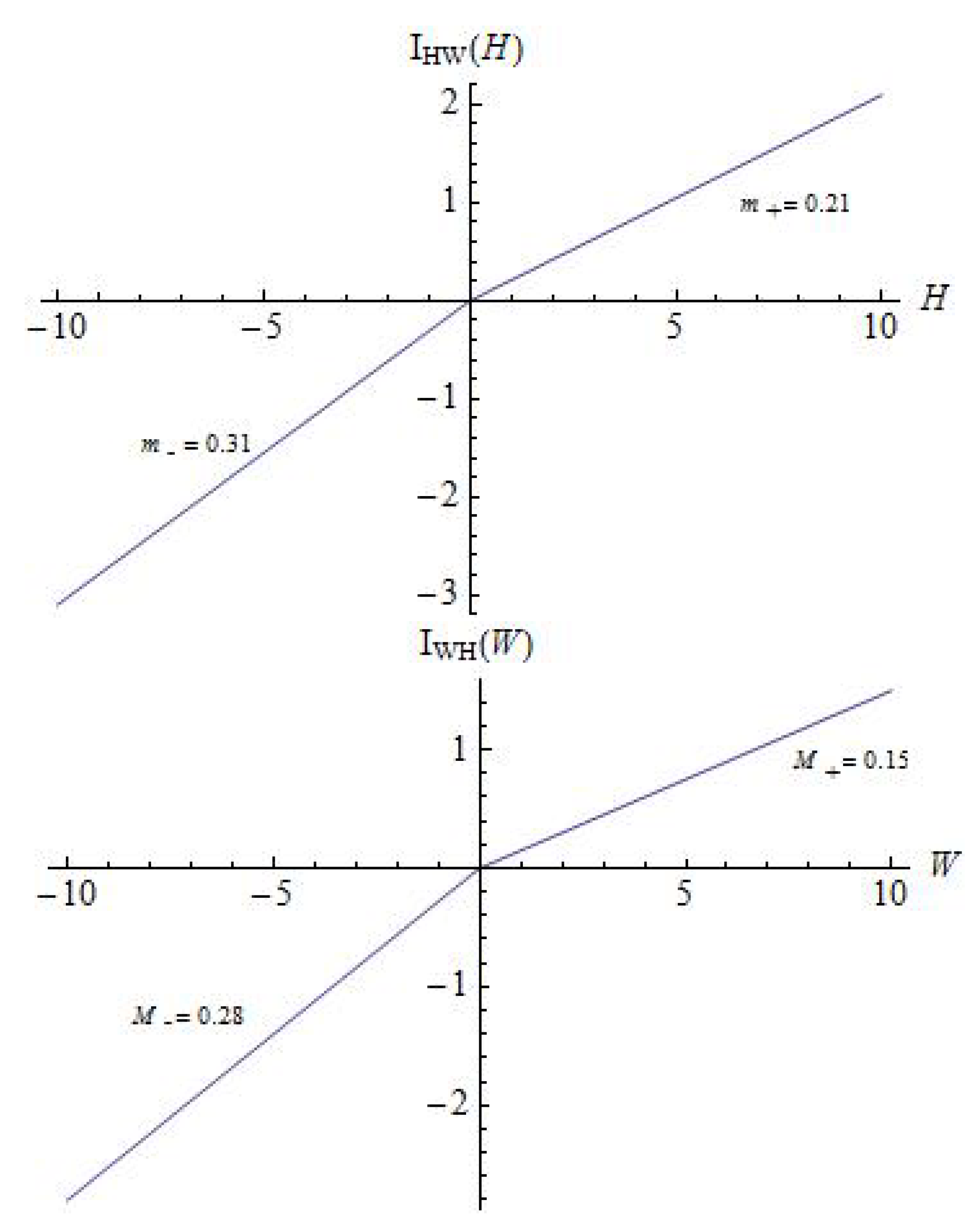
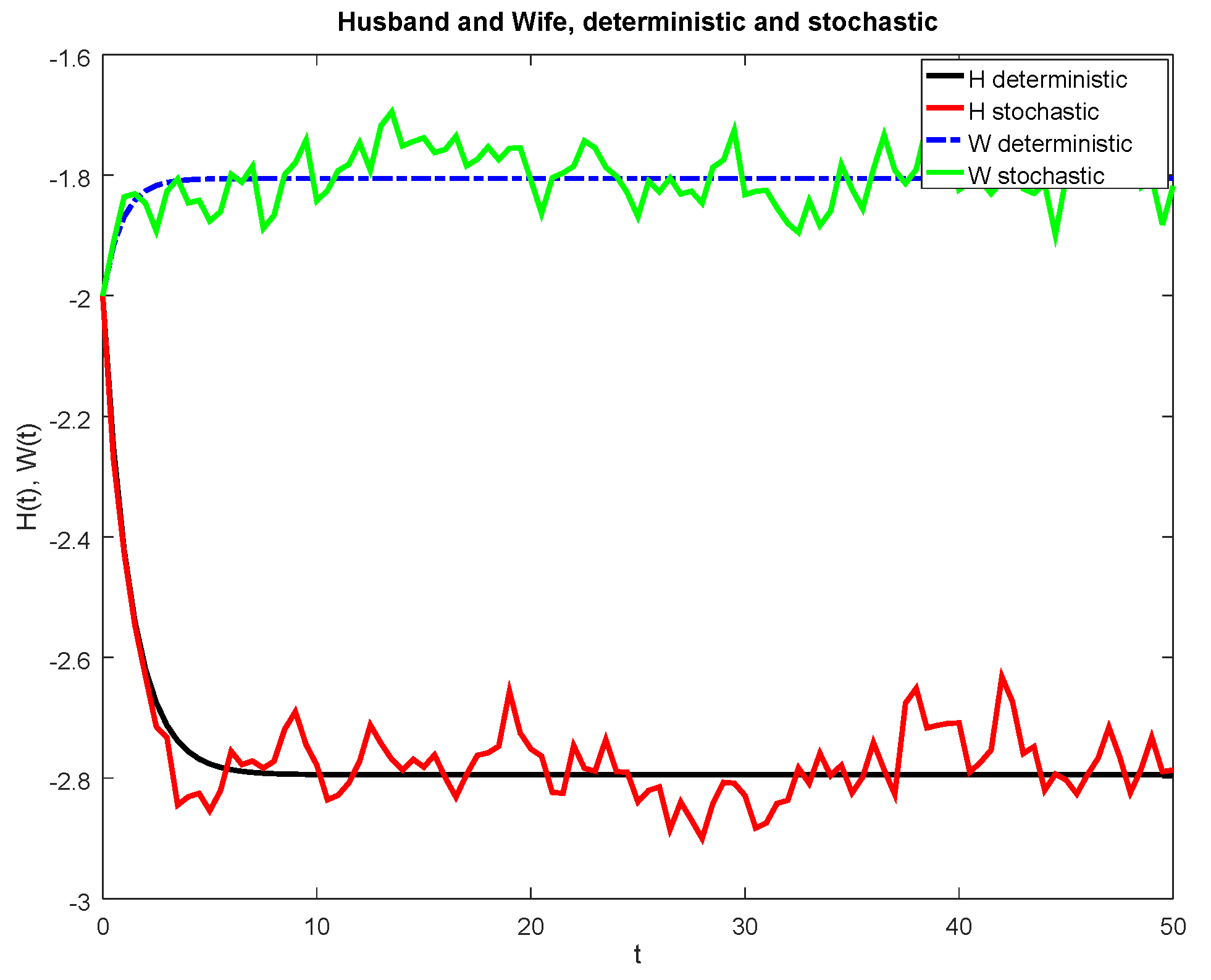
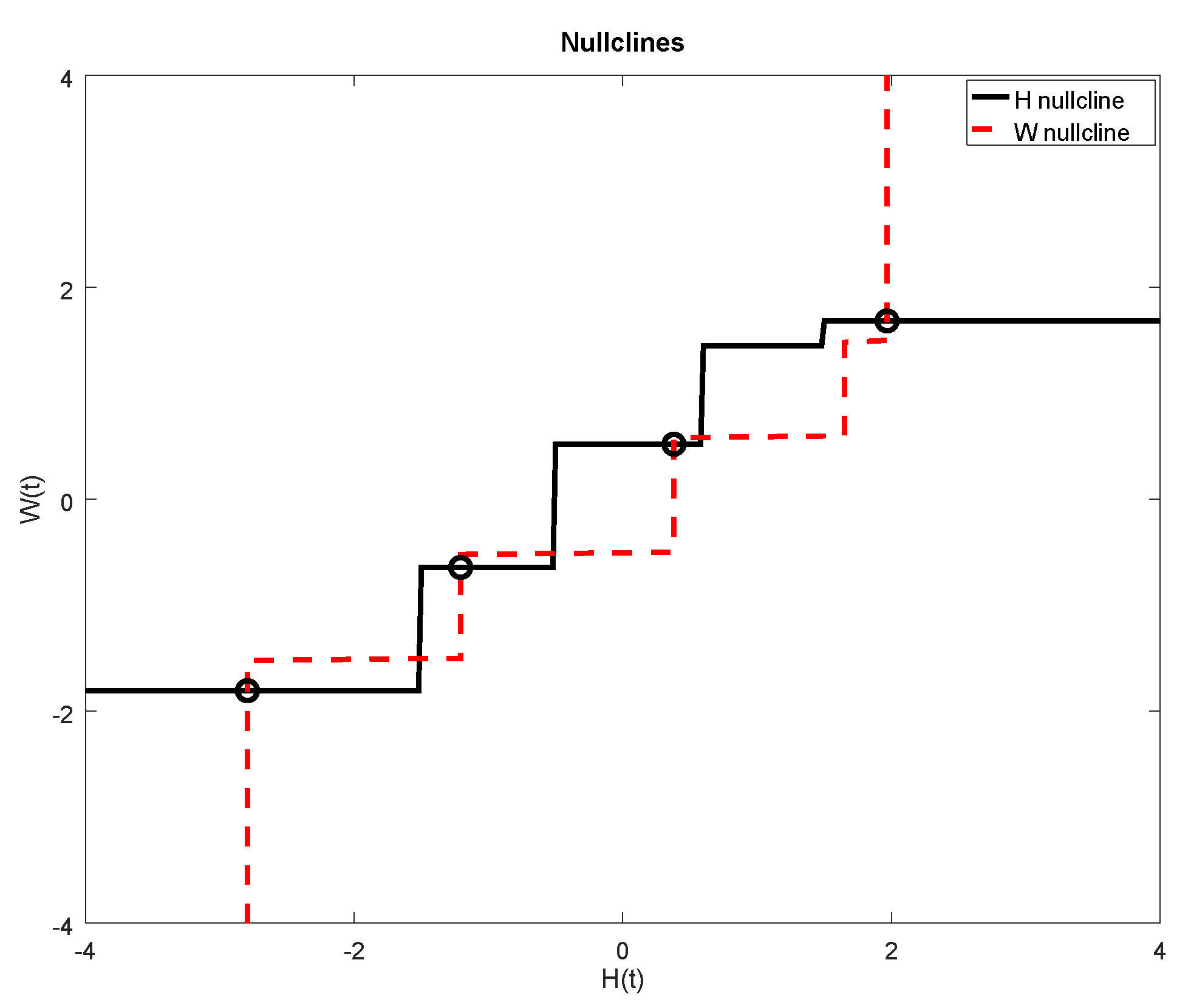
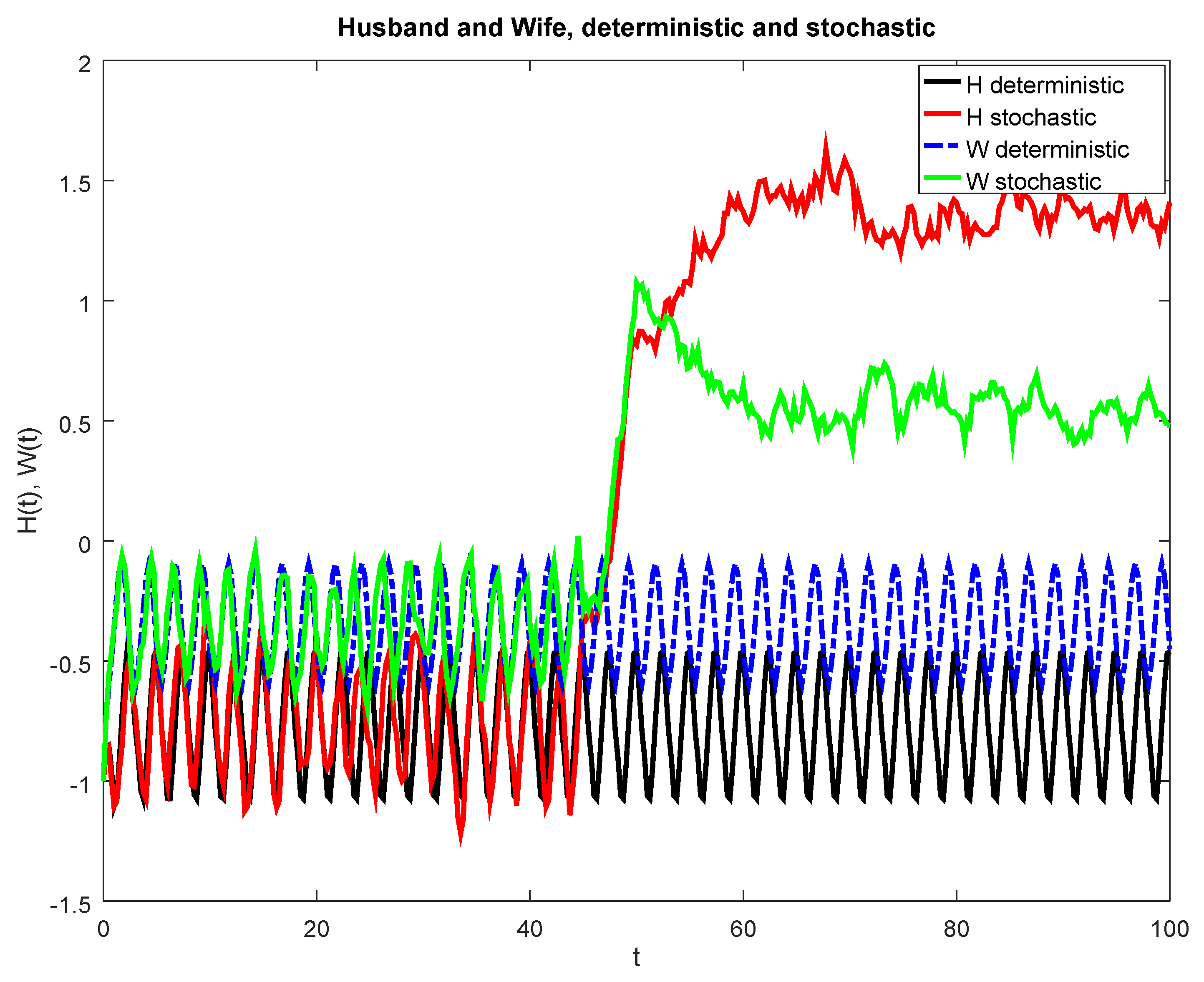
3.4. Piece-Wise Linear Influence Function
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Strogatz, S.H. Nonlinear Dynamics and Chaos with Student Solutions Manual: With Applications to Physics, Biology, Chemistry, and Engineering; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Elishakoff, I. Differential Equations of Love and Love of Differential Equations. J. Humanist. Math. 2019, 9, 226–246. [Google Scholar] [CrossRef] [Green Version]
- Ghosh, K. Love between Two Individuals in a Romantic Relationship: A Newly Proposed Mathematical Model. In Proceedings of the 7th IMT-GT International Conference on Mathematics, Statistics and Its Applications, Bangkok, Thailand, 21–23 July 2011; Volume 21. [Google Scholar]
- Rey, J.M. A mathematical model of sentimental dynamics accounting for marital dissolution. PLoS ONE 2010, 5, e9881. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Binder, P.M. Chaos and Love Affairs. Math. Mag. 2000, 73, 235–236. [Google Scholar] [CrossRef]
- Gragnini, A.; Rinaldi, S.; Feichtlinger, G. Cyclic Dynamics in Romantic Relationships. Int. J. Bifurc. Chaos 1997, 7, 2611–2619. [Google Scholar] [CrossRef]
- Gottman, J.M. The Mathematics of Marriage: Dynamic Nonlinear Models; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Allen, L.J. Introduction to Mathematical Biology; Pearson/Prentice Hall: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Evans, L.C. An Introduction to Stochastic Differential Equations; American Mathematical Society: Providence, RI, USA, 2012; Volume 82. [Google Scholar]
- Allen, E. Modeling with Itô Stochastic Differential Equations; Springer Science & Business Media: Berlin, Germany, 2007; Volume 22. [Google Scholar]
- Hindmarsh, A.C. Ordinary Differential Equation System Solver; Technical Report; Lawrence Livermore National Laboratory: Livermore, CA, USA, 1992. [Google Scholar]
- Kloeden, P.; Platen, E. Applications of mathematics. In Numerical Solution of Stochastic Differential Equations; Springer: Berlin, Germany, 1992; Volume 23. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Figure Number | Type of Influence Function | Parameters |
|---|---|---|
| 2 | Zero influence function | , . |
| 3 | Bilinear | , , , , ; , , . |
| 4 | Piece-wise constant | , , , , , , |
| 5 | Piece-wise constant | , , , , , , , |
| 6 | Piece-wise constant with saturation | , , , , , , , |
| 7 and 8 | Piece-wise linear | , , ; , , |
| 9 and 10 | Piece-wise cubic | , , ; , , |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen-Charpentier, B.; Garza-Hume, C.E.; Jorge, M.d.C. A Continuous Model of Marital Relations with Stochastic Differential Equations. Math. Comput. Appl. 2021, 26, 3. https://doi.org/10.3390/mca26010003
Chen-Charpentier B, Garza-Hume CE, Jorge MdC. A Continuous Model of Marital Relations with Stochastic Differential Equations. Mathematical and Computational Applications. 2021; 26(1):3. https://doi.org/10.3390/mca26010003
Chicago/Turabian StyleChen-Charpentier, Benito, Clara Eugenia Garza-Hume, and María del Carmen Jorge. 2021. "A Continuous Model of Marital Relations with Stochastic Differential Equations" Mathematical and Computational Applications 26, no. 1: 3. https://doi.org/10.3390/mca26010003
APA StyleChen-Charpentier, B., Garza-Hume, C. E., & Jorge, M. d. C. (2021). A Continuous Model of Marital Relations with Stochastic Differential Equations. Mathematical and Computational Applications, 26(1), 3. https://doi.org/10.3390/mca26010003