
Image Segmentation with a Priori Conditions: Applications to Medical and Geophysical Imaging


 ,
,
Abstract
:1. Introduction
2. Mathematical Modelling
2.1. A Priori Conditions
2.2. Minimization Problem and Evolution Equation
2.3. Existence, Uniqueness of the Solution
- where denotes the space of symmetric matrices equipped with the usual ordering.
- There exists a constant such that for each:the function:is non-decreasing on .
- For each , there exists a continuous function satisfying such that if and satisfy:then:for all with and .
- For each , the function is positively homogeneous of degree one in p, i.e., , .
- There exists a positive constant such that for all and . Here, denotes the unit outer normal vector of at
- Thanks to [20], we already know that . Since, , it is clear that and therefore .
- Note that since F does not depend on u. It suffices to show that is non-decreasing on . On can easily see that the condition is satisfied for all as soon as .
- Since g does not depend on X, it suffices to check the condition on F. We refer the reader to Gout and Le Guyader [20] for the proof.
3. Experimental Results
- –
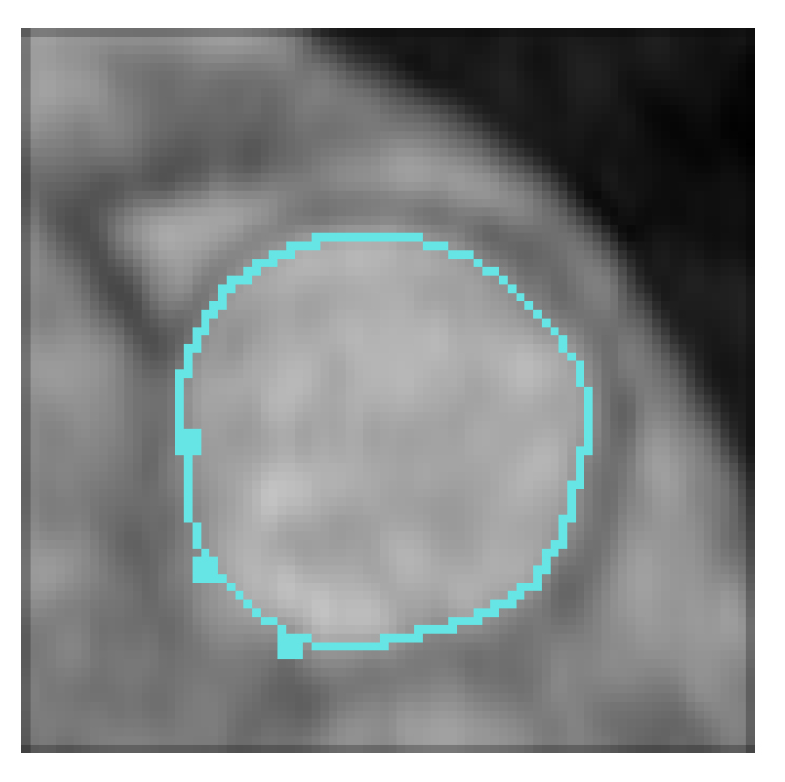
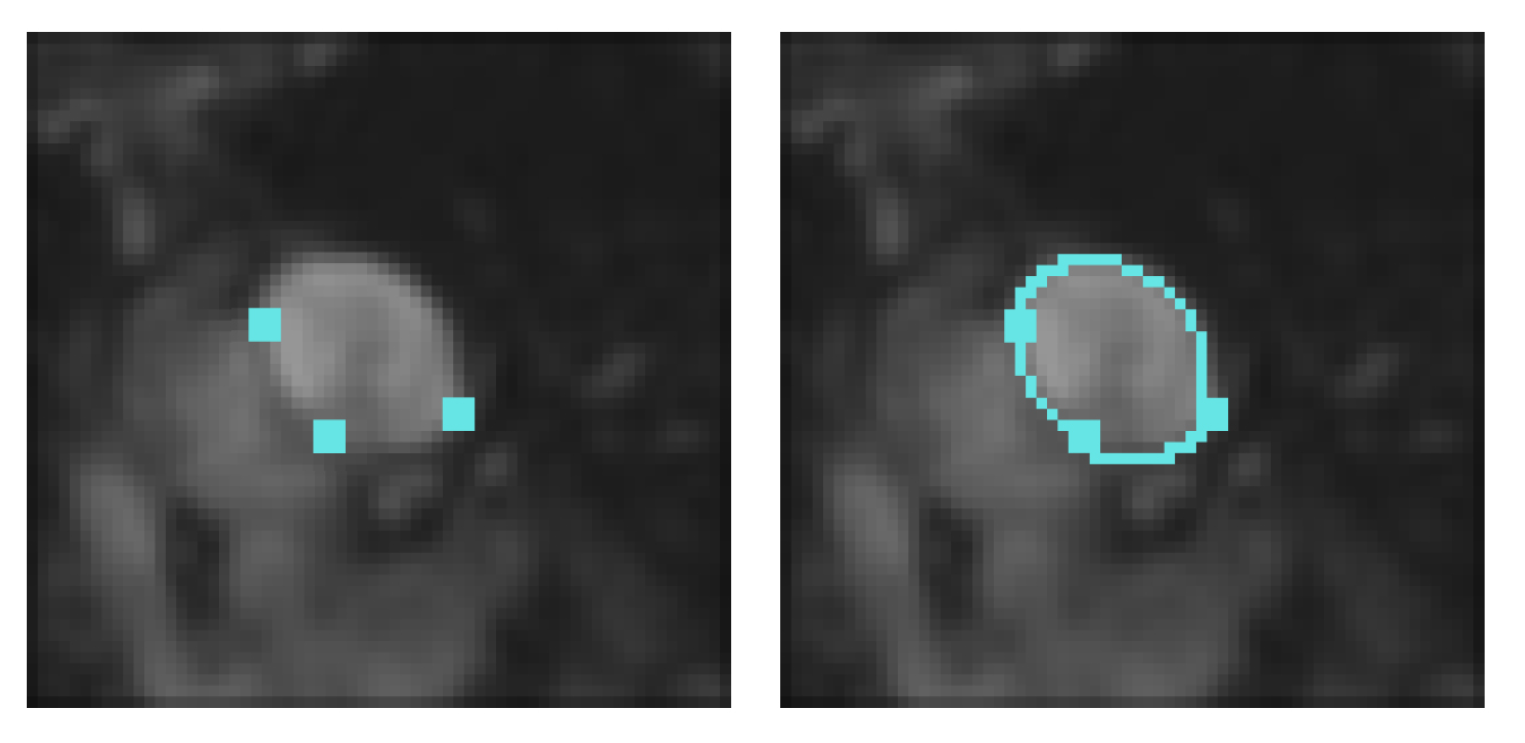
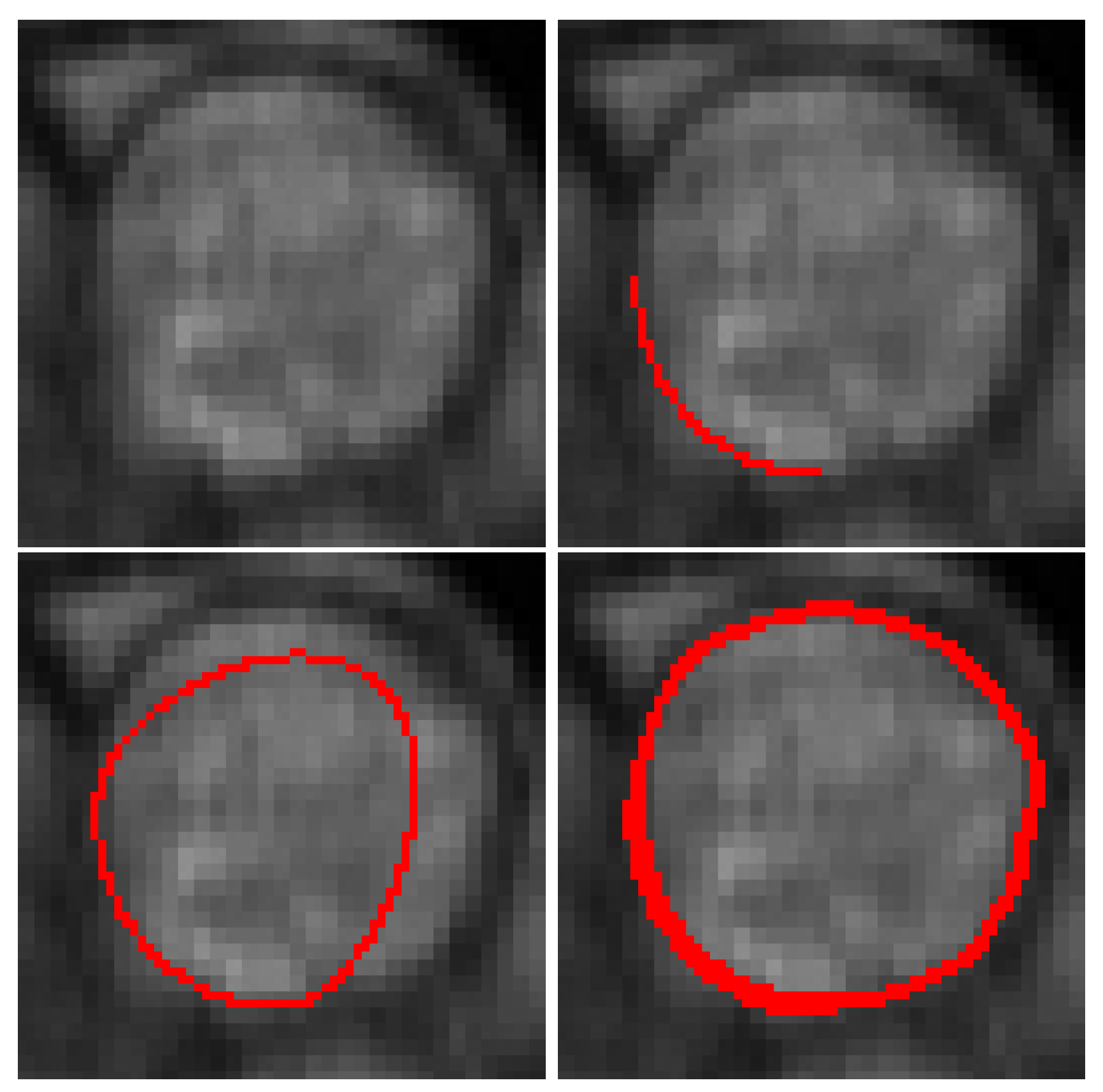
- Following the considered application, the initial condition can be a set of points, or a curve (then can be constructed from a set points using a basic spline function (see Gout et al. [22])).
- –
- The stop criterion can be either a preset number of iterations or a check that the solution is stationary.
- –
- The distance is normalized in order to have the same weight between a priori information of the image and geometrical constraints.
- –
- The discretization is made using finite differences as done in Chan and Vese [11].
- –
- In the numerical examples, we take , the regularization term is equal to 0.8.
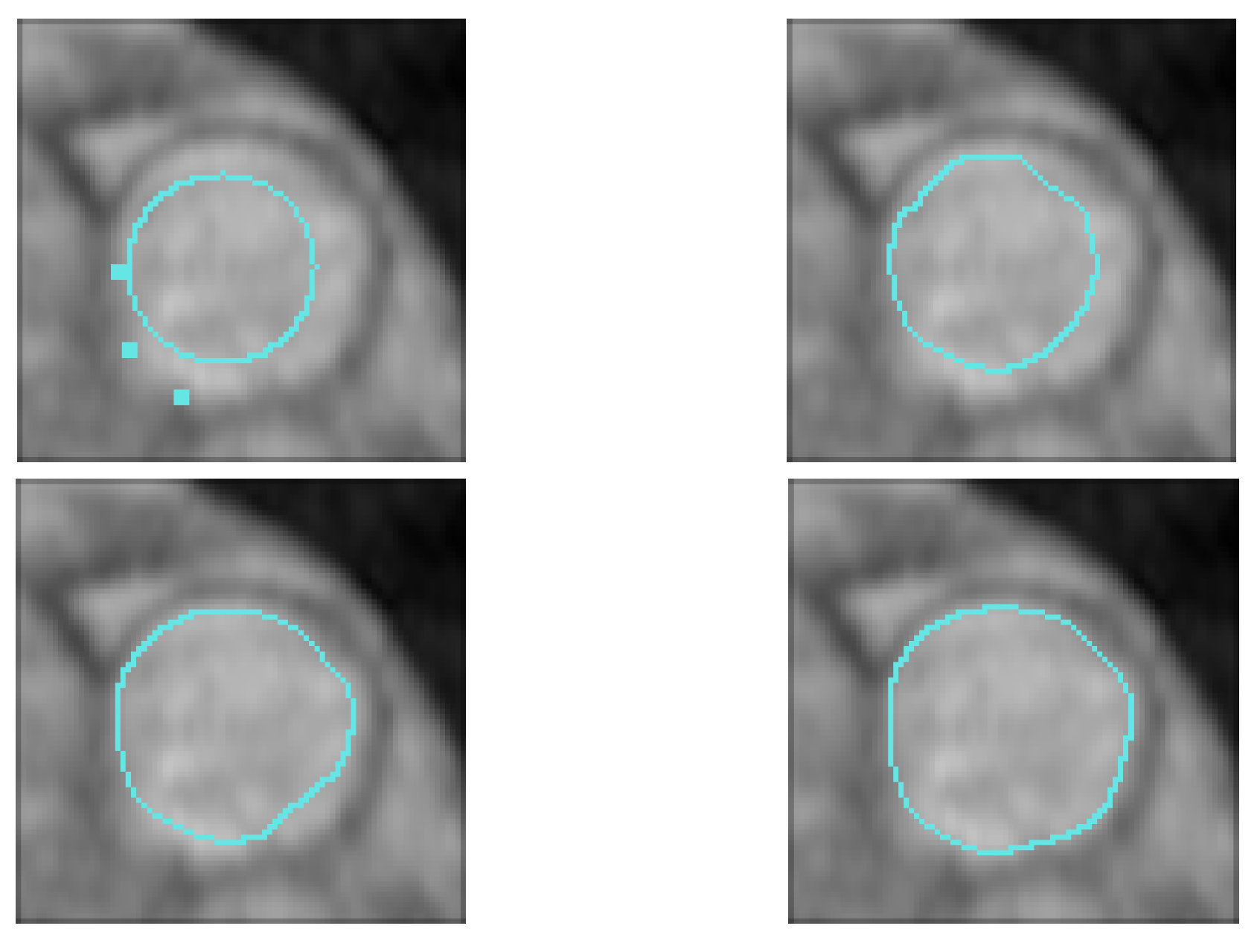
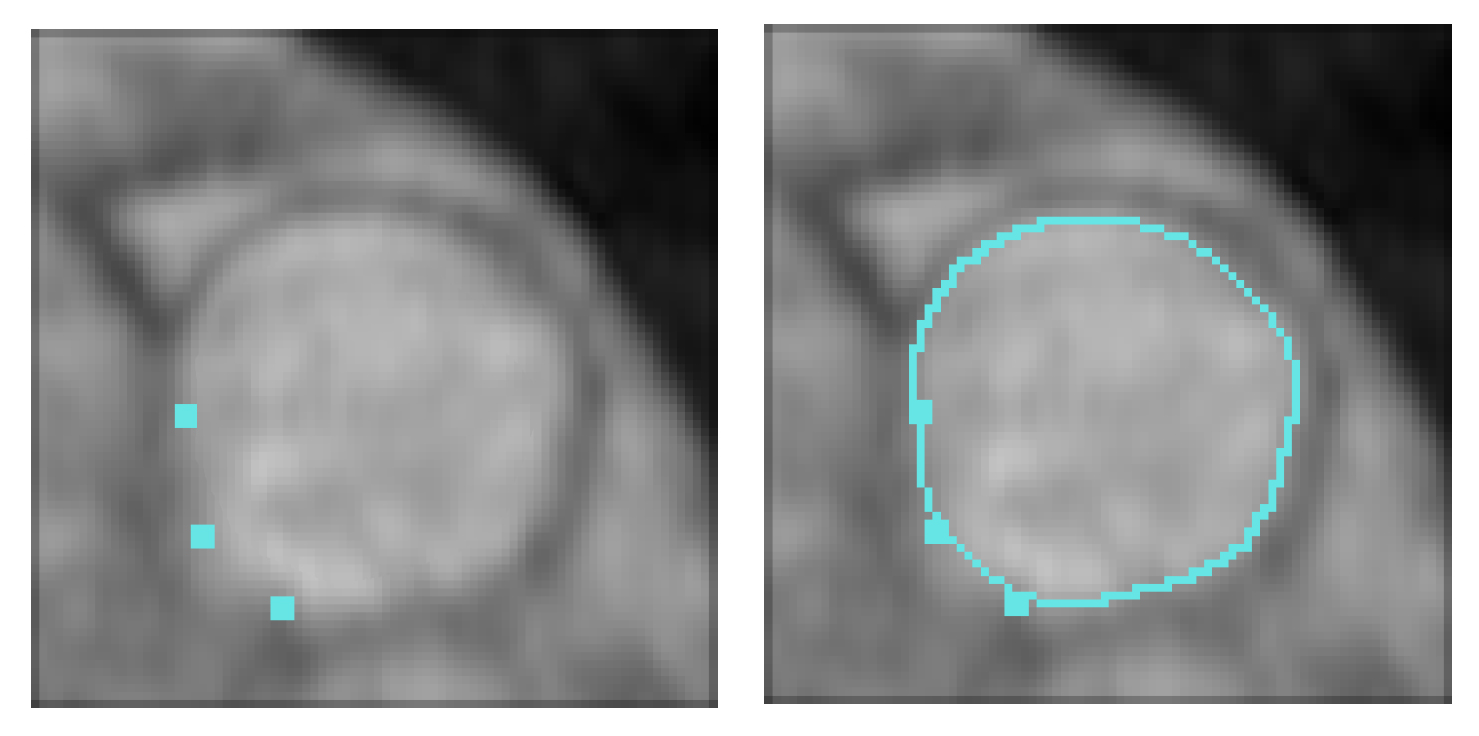
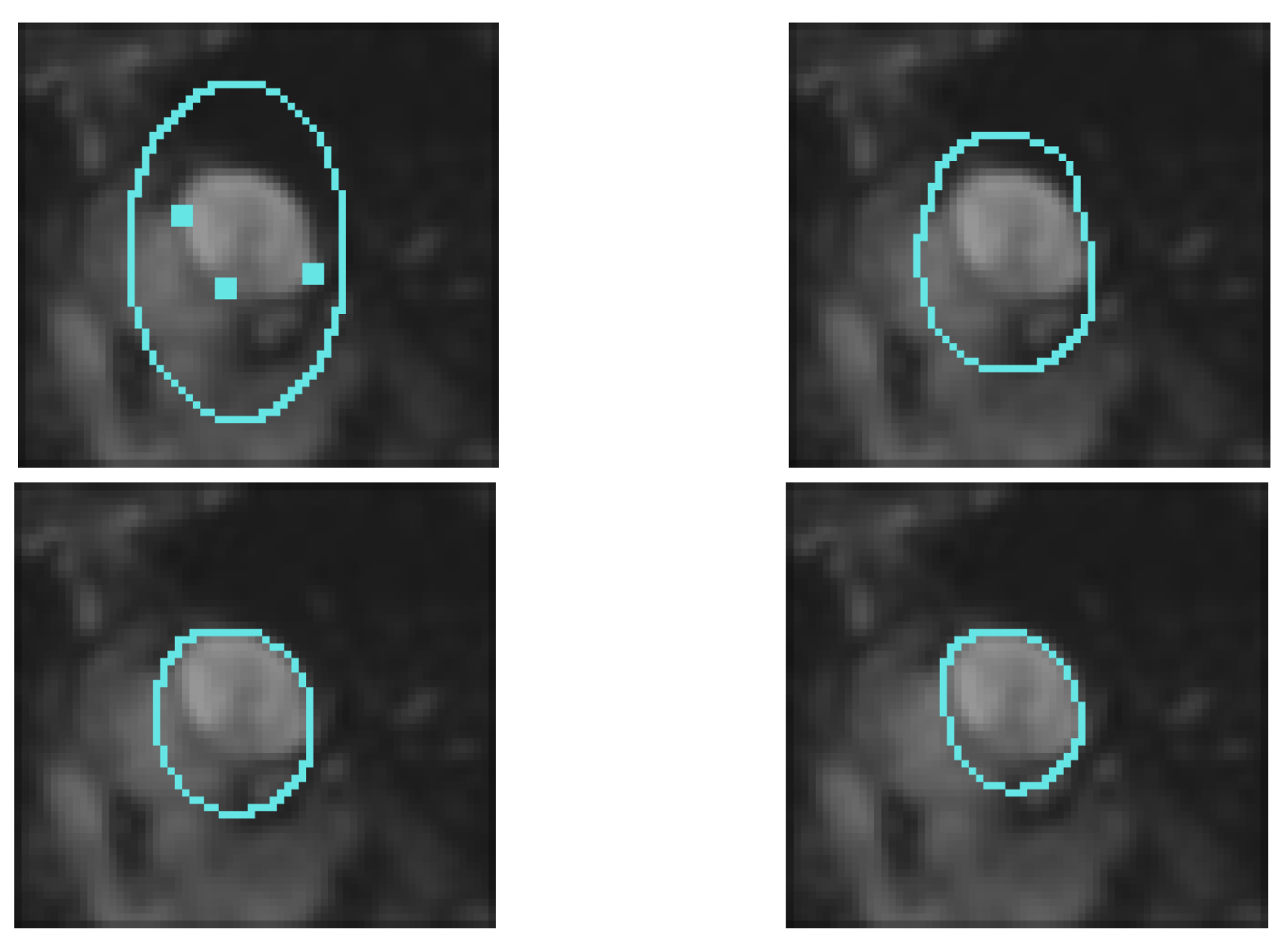
3.1. Impact of the Initial Guess on the Segmentation Process
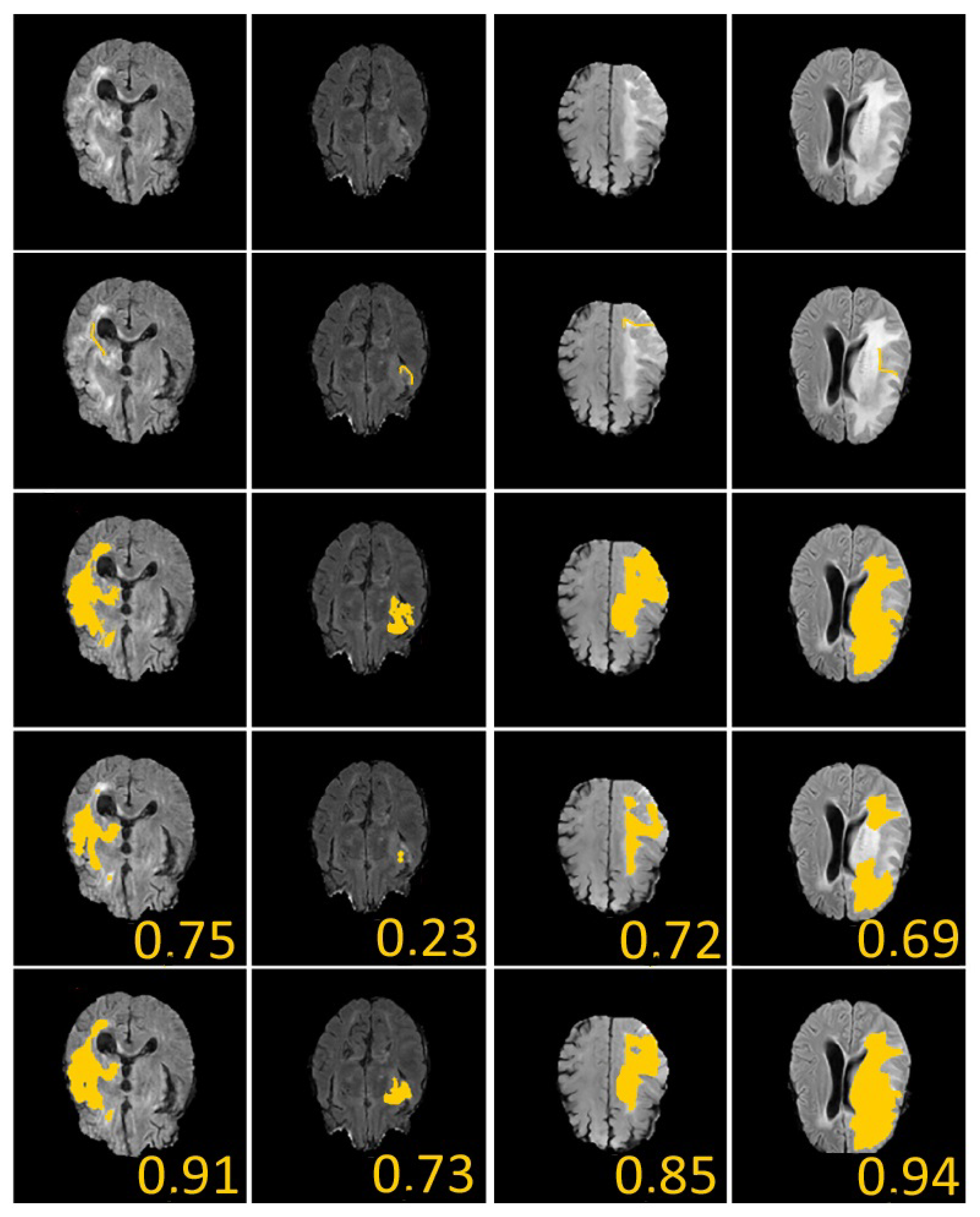
3.2. Quantitative Performance
- –
- The Jaccard index [30], or Intersection over Union (IoU), is a commonly used metric in segmentation. It is defined as the area of intersection between the predicted segmentation map and the ground truth, divided by the area of union between the predicted segmentation map and the ground truth:where G is the ground truth and P denotes the predicted segmentation maps. It ranges between 0 and 1. Mean-IoU (mIoU) is defined as the average IoU over all classes. It is widely used in reporting the performance of segmentation algorithms.
- –
- The Dice coefficient (Dice) is a popular metric for image segmentation, especially in medical imaging. This coefficient can be defined as twice the overlap area of predicted and ground-truth maps, divided by the total number of pixels in both images:When applied to binary segmentation maps, and referring to the foreground as a positive class, the Dice coefficient is essentially identical to the F1 score:(The F1 score, which is defined as the harmonic mean of precision (Prec) and recall (Rec): where Prec = and Rec = ), where TP refers to the true positive fraction, FP refers to the false positive fraction, and FN refers to the false negative fraction.
- –
- The Hausdorff distance (Hd) evaluates the quality of the segmentation boundaries by computing the maximum distance between the prediction and its ground truth:where and are the surface point sets of P (segmentation prediction) and G (ground truth).
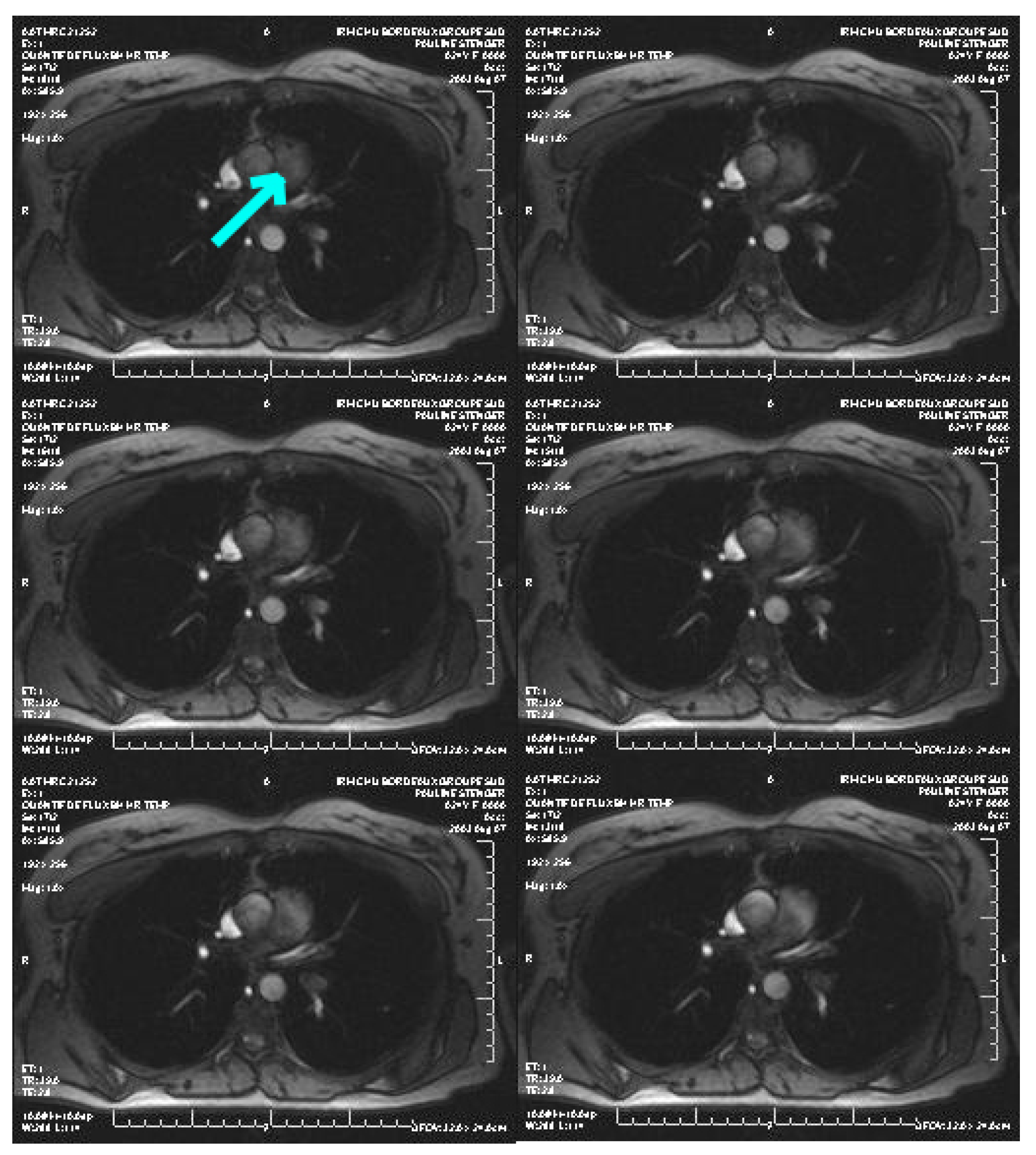
3.3. Applications to Medical Imaging
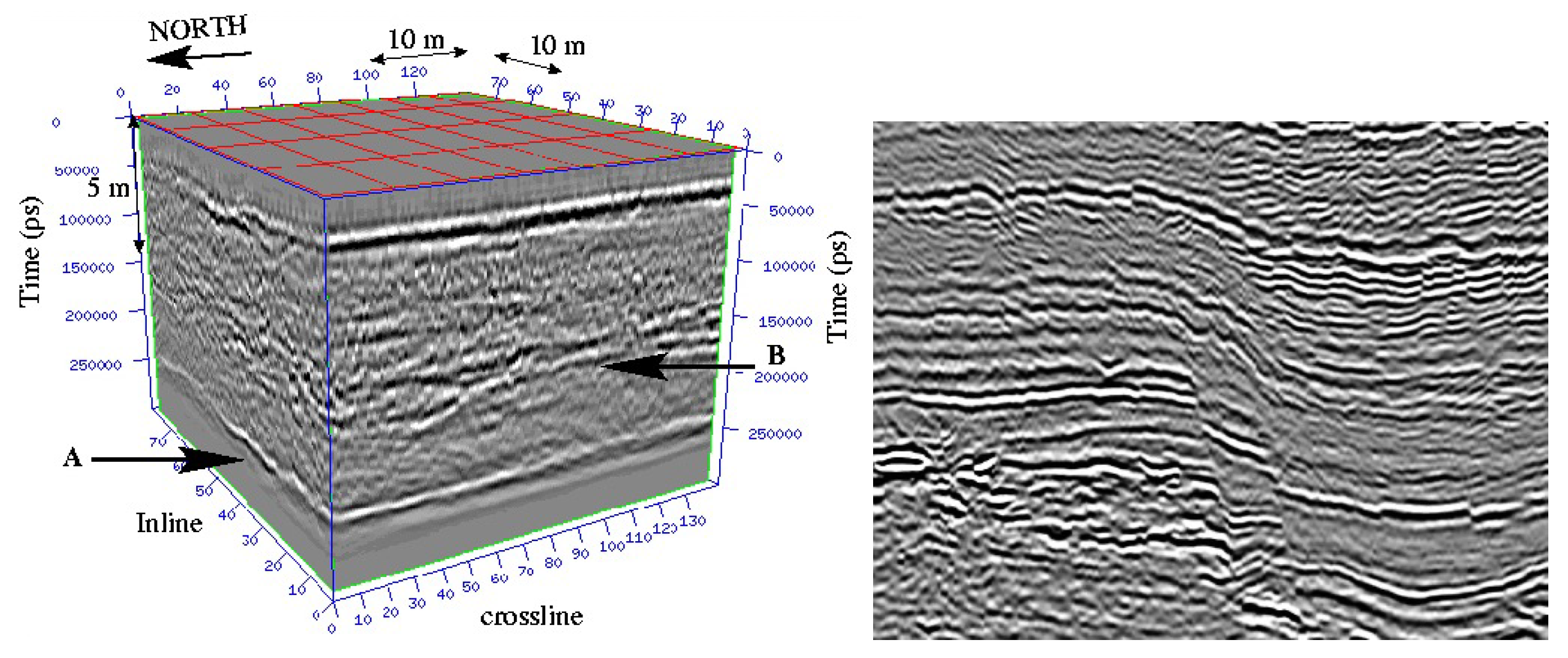
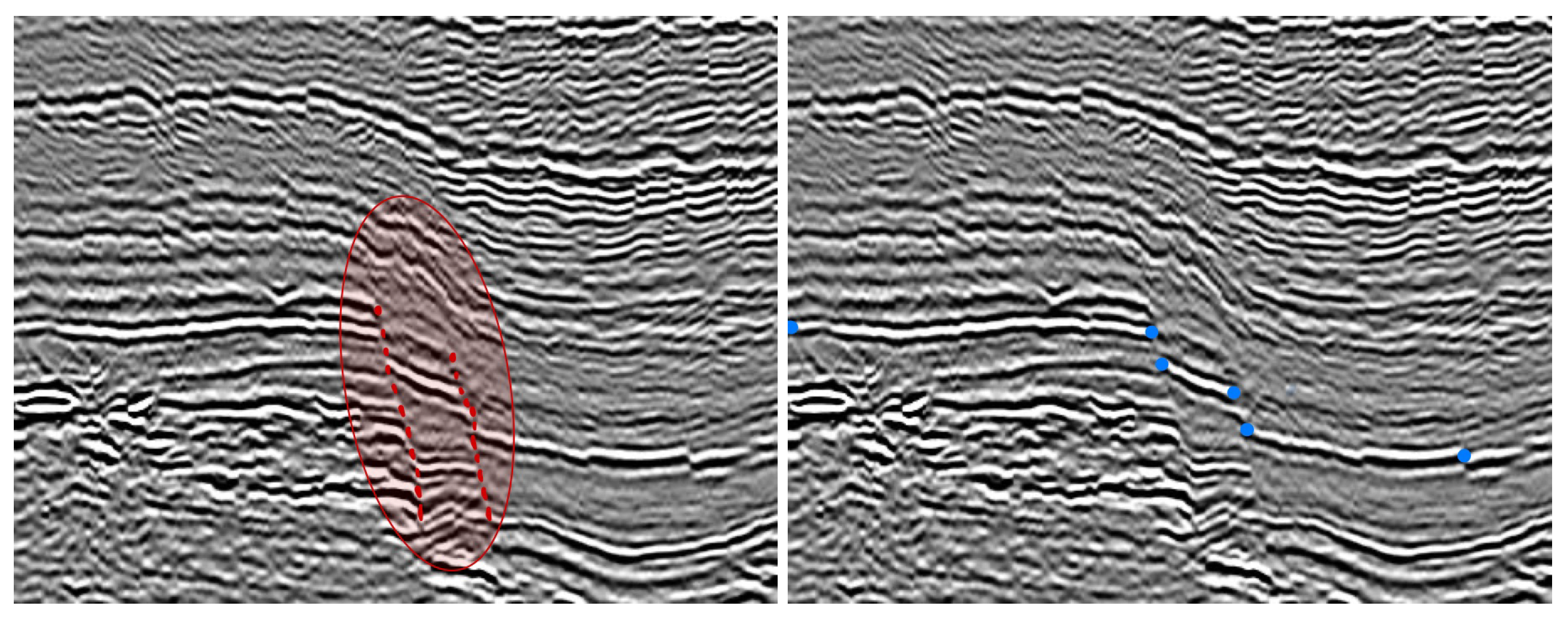
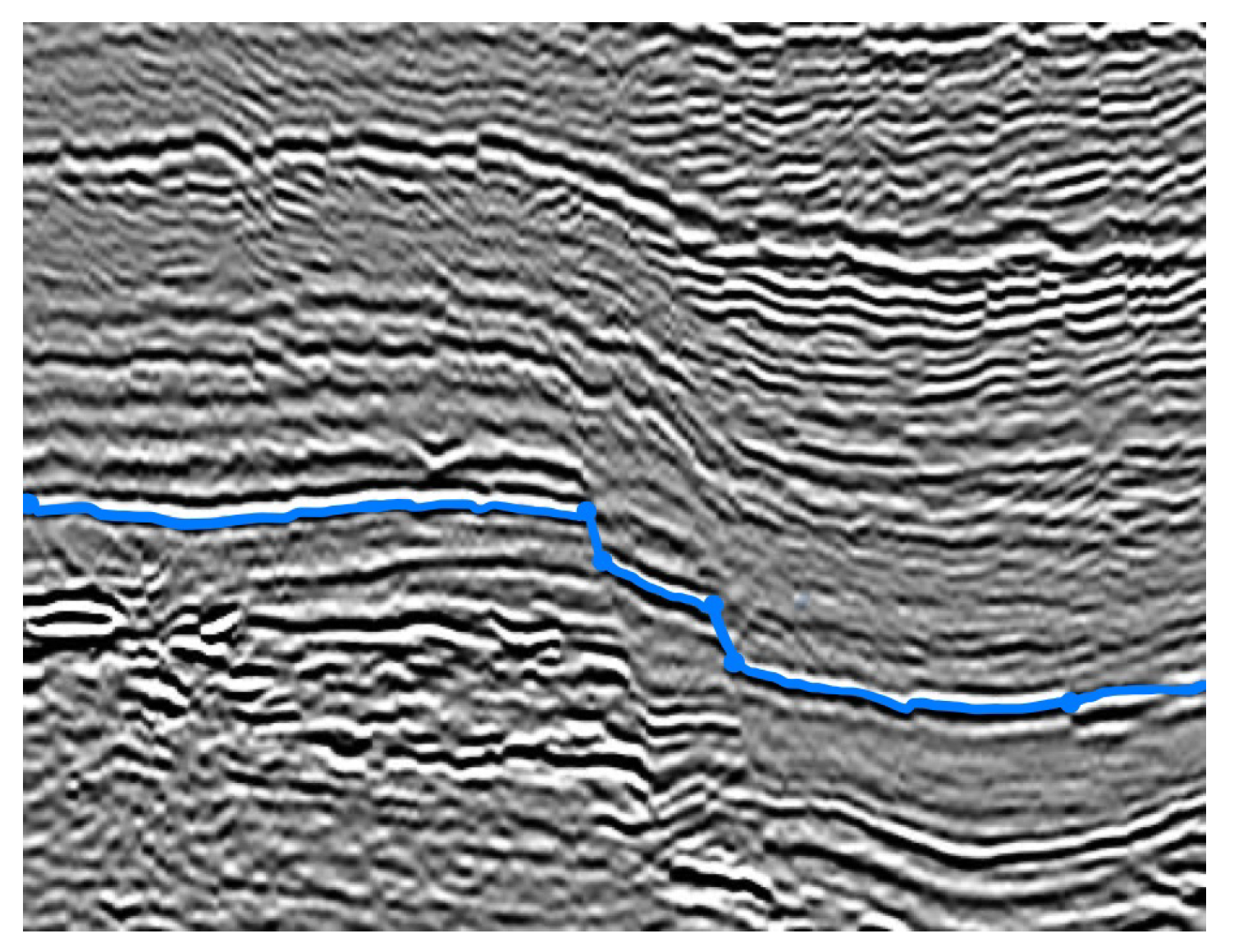
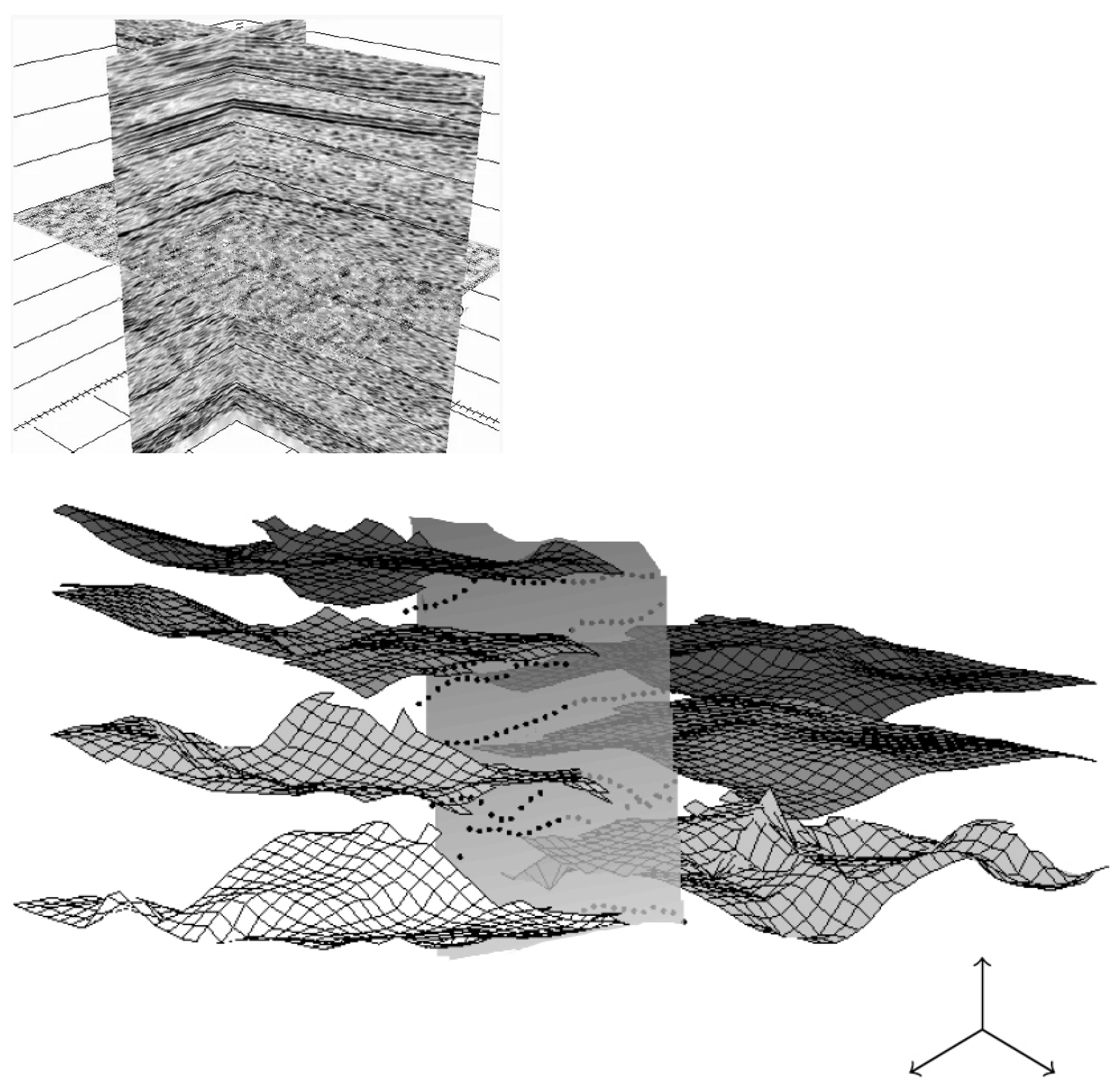
3.4. Applications to Geophysical Imaging
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fukushima, K. Neocognitron: A self-organizing neural network model for a mechanism of pattern recognition unaffected by shift in position. Biol. Cybern. 1980, 36, 193–202. [Google Scholar] [CrossRef] [PubMed]
- Waibel, A.; Hanazawa, T.; Hinton, G.; Shikano, K.; Lang, K.J. Phoneme recognition using time-delay neural networks. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 328–339. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. In Proceedings of the Advances in Neural Information Processing Systems 27: Annual Conference on Neural Information Processing Systems 2014, Montreal, QC, Canada, 8–13 December 2014; pp. 2672–2680. [Google Scholar]
- Minaee, S.; Boykov, Y.Y.; Porikli, F.; Plaza, A.J.; Kehtarnavaz, N.; Terzopoulos, D. Image Segmentation Using Deep Learning: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 1. [Google Scholar] [CrossRef]
- Fantazzini, A.; Esposito, M.; Finotello, A.; Auricchio, F.; Conti, M.; Pane, B.; Spinella, G. 3D Automatic Segmentation of Aortic Computed Tomography Angiography Combining Multi-View 2D Convolutional Neural Networks. Cardiovasc. Eng. Tech. 2020, 11, 576–586. [Google Scholar] [CrossRef]
- Luo, Q.; Wang, L.; Lv, J.; Xiang, S.; Pan, C. Few-shot learning via feature hallucination with variational inference. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2021; pp. 3963–3972. [Google Scholar]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Chan, T.F.; Vese, L.A. Active contours without edges. IEEE Trans. Image Process. 2001, 10, 266–277. [Google Scholar] [CrossRef] [Green Version]
- Mumford, D.; Shah, J. Optimal approximation by piecewise smooth functions and associated variational problems. Comm. Pure Appl. Math. 1989, 42, 577–685. [Google Scholar] [CrossRef] [Green Version]
- Vese, L.; Le Guyader, C. Variational Methods in Image Processing; CRC Press: Boca Raton, FL, USA; Taylor and Francis: Oxfordshire, UK, 2015; 410p, ISBN 9781439849736. [Google Scholar]
- Sethian, J.A. A fast marching level set method for monotonically advancing fronts. Proc. Natl. Acad. Sci. USA 1996, 93, 1591–1595. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Forcadel, N.; Le Guyader, C.; Gout, C. Generalized fast marching method: Applications to image segmentation. Numer. Algorithms 2008, 48, 189–211. [Google Scholar] [CrossRef]
- Caselles, V.; Kimmel, R.; Sapiro, G. Geodesic Active Contours. Int. J. Comput. Vis. 1997, 22, 61–79. [Google Scholar] [CrossRef]
- Le Guyader, C.; Lambert, Z.; Petitjean, C. Analysis of the weighted Van der Waals-Cahn-Hilliard model for image segmentation. In Proceedings of the 10th International Conference on Image Processing Theory, Tools and Applications IPTA 2020, Paris, France, 9–12 November 2020. [Google Scholar]
- Cremers, D.; Sochen, N.; Schnörr, C. Towards Recognition-Based Variational Segmentation Using Shape Priors and Dynamic Labeling. Lect. Notes Comput. Sci. 2003, 2695, 388–400. [Google Scholar]
- Gout, C.; Le Guyader, C.; Vese, L. Segmentation under geometrical conditions using geodesic active contours and interpolation using level set methods. Numer. Algorithms 2005, 39, 155–173. [Google Scholar] [CrossRef] [Green Version]
- Gout, C.; Le Guyader, C. Geodesic active contour under geometrical conditions: Theory and 3D applications. Numer. Algorithms 2008, 48, 105–133. [Google Scholar]
- Gout, C.; Vieira-Teste, S. Using deformable models to segment complex structures under geometric constraints. In Proceedings of the 4th IEEE Southwest Symposium on Image Analysis and Interpretation, Austin, TX, USA, 2–4 April 2000; pp. 101–105. [Google Scholar]
- Gout, C.; Lambert, Z.; Apprato, D. Data Approximation: Mathematical Modelling and Numerical Simulations; INSA Rouen Normandie; EDP Sciences: Les Ulis, France, 2019; 168p, ISBN 9978-2-7598-2367-3. [Google Scholar]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef] [Green Version]
- Osher, S.; Fedkiw, R. Level Set Methods and Dynamic Implicit Surfaces; Springer: Cham, Switzerland, 2003. [Google Scholar]
- Weickert, J.; Kühne, G. Fast methods for implicit active contours models. In Geometric Level Set Methods in Imaging, Vision, and Graphics; Springer: New York, NY, USA, 2003. [Google Scholar]
- Cohen, L.D. On active contours models and balloons. Comput. Vision Graph. Image Process. Image Underst. 1991, 53, 211–218. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the MICCAI International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Menze, B.H.; Jakab, A.; Bauer, S.; Kalpathy-Cramer, J.; Farahani, K.; Kirby, J.; Burren, Y.; Porz, N.; Slotboom, J.; Wiest, R.; et al. The multimodal brain tumor image segmentation benchmark (BRATS). IEEE Trans. Med. Imaging 2014, 34, 1993–2024. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization, International Conference on Learning Representations. arXiv 2015, arXiv:1412.6980. [Google Scholar]
- Jaccard, P. Distribution de la flore alpine dans le bassin des Dranses et dans quelques régions voisines. Bull. SociéTé Vaudoise Sci. Nat. 1901, 37, 241–272. [Google Scholar]
- Kim, B.; Ye, J.C. Cycle-Consistent Adversarial Network with Polyphase U-Nets for Liver Lesion Segmentation. 2018. Available online: https://openreview.net/pdf?id=SyQtAooiz (accessed on 2 March 2021).
- Laffon, E.; Laurent, F.; Bernard, V.; De Boucaud, L.; Ducassou, D.; Marthan, R. Noninvasive assessment of pulmonary arterial hypertension by MR phase-mapping method. J. Appl. Physiol. 2001, 90, 2197–2202. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laffon, E.; Vallet, C.; Bernard, V.; Montaudon, M.; Ducassou, D.; Laurent, F.; Marthan, R. A computed method for non invasive MRI assessment of pulmonary arterial hypertension. J. Appl. Physiol. 2004, 96, 463–468. [Google Scholar] [CrossRef]
- Debroux, N.; Le Guyader, C. A joint segmentation/registration model based on a nonlocal characterization of weighted total variation and nonlocal shape descriptors. SIAM J. Imaging Sci. 2018, 11, 957–990. [Google Scholar] [CrossRef]
- Ozeré, S.; Le Guyader, C.; Gout, C. Joint segmentation/registration model by shape alignment via weighted total variation minimization and nonlinear elasticity. SIAM J. Imaging Sci. 2015, 8, 1981–2020. [Google Scholar] [CrossRef]
- Gout, C.; Le Guyader, C.; Romani, L.; Saint-Guirons, A.-G. Approximation of surfaces with fault(s) and/or rapidly varying data, using a segmentation process, Dm-splines and the finite element method. Numer. Algorithms 2008, 48, 67–92. [Google Scholar] [CrossRef]
- Le Guyader, C.; Apprato, D.; Gout, C. On the Construction of Topology-Preserving Deformation Fields. IEEE Trans. Image Process. 2012, 21, 1587–1599. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Example 1 | Example 2 |
|---|---|---|
| Gout et al. [19] | 420 iterations | 260 iterations |
| Our method | 80 iterations | 8 iterations |
| Method | mIoU | Dice | Hd | GPU Time |
|---|---|---|---|---|
| U-Net [27] | 78.3 | 87.7 | 43.5 | 4.45 |
| Chan-Vese [11] | 77.6 | 88.1 | 41.5 | 2.02 |
| Our method | 79.6 | 89.1 | 39.5 | 2.12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khayretdinova, G.; Gout, C.; Chaumont-Frelet, T.; Kuksenko, S. Image Segmentation with a Priori Conditions: Applications to Medical and Geophysical Imaging. Math. Comput. Appl. 2022, 27, 26. https://doi.org/10.3390/mca27020026
Khayretdinova G, Gout C, Chaumont-Frelet T, Kuksenko S. Image Segmentation with a Priori Conditions: Applications to Medical and Geophysical Imaging. Mathematical and Computational Applications. 2022; 27(2):26. https://doi.org/10.3390/mca27020026
Chicago/Turabian StyleKhayretdinova, Guzel, Christian Gout, Théophile Chaumont-Frelet, and Sergei Kuksenko. 2022. "Image Segmentation with a Priori Conditions: Applications to Medical and Geophysical Imaging" Mathematical and Computational Applications 27, no. 2: 26. https://doi.org/10.3390/mca27020026
APA StyleKhayretdinova, G., Gout, C., Chaumont-Frelet, T., & Kuksenko, S. (2022). Image Segmentation with a Priori Conditions: Applications to Medical and Geophysical Imaging. Mathematical and Computational Applications, 27(2), 26. https://doi.org/10.3390/mca27020026