1. Introduction
Due to the increase in population growth and groundwater depletion, the demand for fresh and potable water has led to rising growth in desalination plants, especially in arid and semi-arid regions such as the Persian Gulf, Red Sea, and the Gulf of Oman [
1]. It has also been estimated that the percentage of water shortage will increase by 60% by the year 2025 [
2]. Hence, since about 97.5% of the total volume of the hydrosphere is contained in seas and oceans [
3], desalination plants are the most viable solution for today’s drinking water problems, however, these plants cause many negative impacts. The effluent from desalination plants, called ‘brine’, is discharged into the seawater and contains concentrated salt, which is almost double the salinity of the receiving water and ends up adding this salinity to the seawater [
1]. Along with this, if a desalination plant is using a multistage flash (MSF) technique, then the brine could also raise turbidity and temperature (Bleninger and Jirka, 2008) [
4]. This concentrated brine stream can deteriorate chemical, physical, and biological attributes of the receiving water. Hence, the effect of brine is majorly evident on the environment, especially on flora and fauna. Therefore, many countries like the USA and Europe have made strict regulations for effluent standards [
4].
To meet the existing regulations, a diffuser can be placed at the end of the outfall system to dilute the concentrated brine—since in the absence of dilution—brine plume extends its vicinity and will be harmful to the ecosystem [
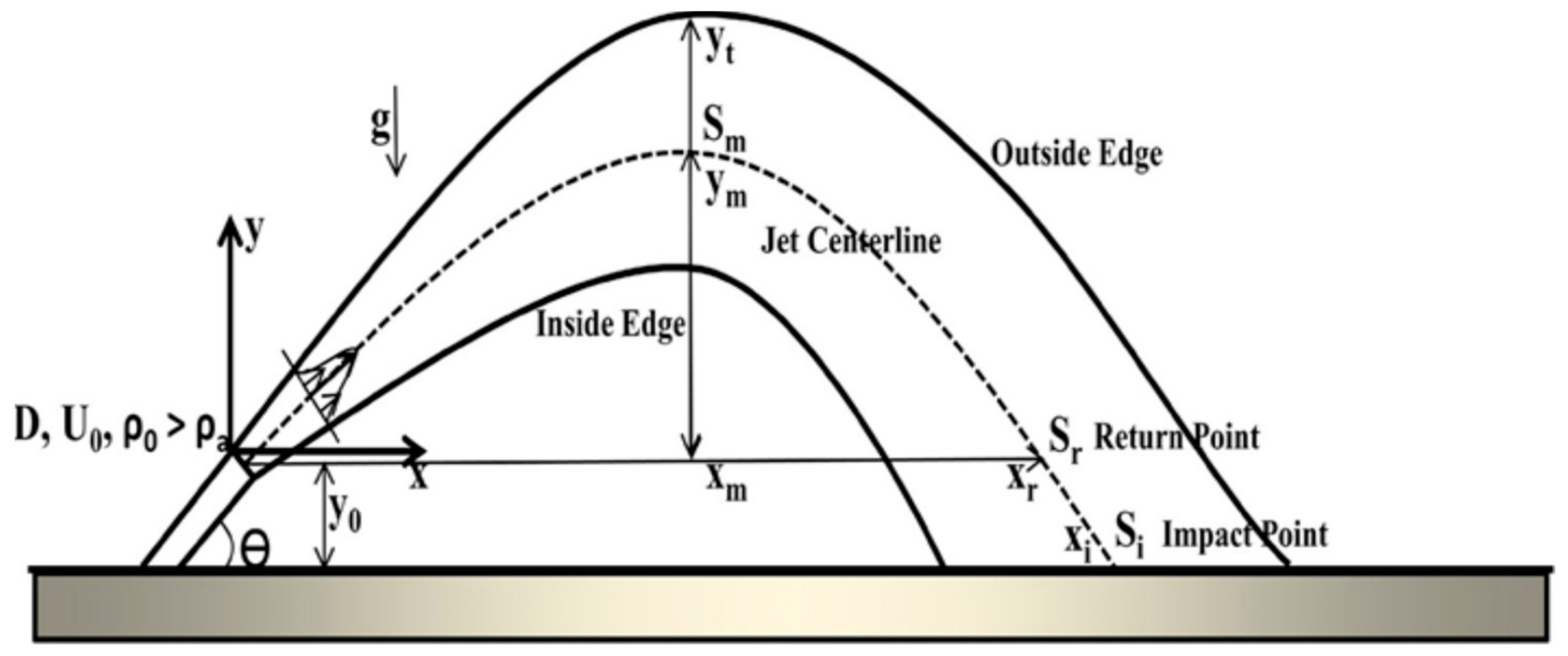
1]. It has also been reported that the discharge of brine using inclined dense jets has been in use since the 1970s, in which dilution and geometry are the major parameters to be considered [
5]. Dilution of brine occurs in two steps: (a) Primary dilution, which appears in the near field due to density difference, between the seawater and effluent as well as due to momentum flux and geometry of the outfall; and (b) Natural dilution in the far-field, due to diffusion and mixing [
6]. The impact can generally be seen in the range of 300 m from the point of discharge, which is generally the near-field region [
2]. Hence, it is important to focus on the near-field region to design the outfall system for greater dilution [
7]. Since effluent density varies from the ambient water, which makes the jet rise or fall, when the dense effluent is discharged upwards it is called the negatively buoyant jet. As the jet moves upwards its momentum decreases, which then returns towards the bottom due to its high density after attaining the maximum height. When the effluent’s density is lower than the receiving water, and it is discharged downwards, a penetration depth is attained by the jet and the effluent is therefore made to rise, this is known as a positively buoyant jet [
8,
9].
Extensive studies have been conducted on negatively buoyant jets. Marti et al. (2010) [
7] conducted research, in which an angle of 60 degrees was selected with three different Froude number regimes (one-third, two-thirds, and full-flow capacity) and it was found that the Froude numbers below 20 were giving higher dilution than the predicted extrapolation. Zhang et al. (2016) [
10] did the numerical investigation for inclined dense jets at a 45° angle and for the study, a large eddy simulation (LES) method was applied along with a Smagorinsky and Dynamic Smagorinsky sub-grid scale (SGS). Later, numerical results including jet trajectory, geometry, and dilution were cross-validated with the experimental results and it was found that LES was able to regenerate the outputs satisfactorily. Shao and Law (2010) [
11] studied the behavior of dense jet for angles of 30° and 45° with different densiometric Froude numbers. For the measurement of velocity and concentration, combined Particle Image Velocimetry (PIV) and Planar Laser-Induced Fluorescence (PLIF) were applied. Velocity and concentration profiles were used to find the mixing and diluting parameters as well. It was found that return point dilution, the horizontal distance of return point, terminal height, centerline peak location, and its dilution were correlated to the Froude number. Oliver et al. (2008) [
12] investigated the k-ε turbulence model in the standard fluid dynamics package (CFX) and took two approaches, which included, one with the standard form of the model, and another with a calibrated model achieved by adjusting the Schmidt number. After comparing numerical data, experimental data, along with the data obtained from the studies of previous integral models, concluded that the k-ε model was providing better prediction for the trajectory data, except the data for the integrated dilution at the centerline as they were over-predicting the density gradient, which resulted in the under-estimation of the dilution. Palomar et al. (2012) [
13] investigated the performances of CORMIX, VISUAL PLUMES, and VISJET models for the inclined dense studies and obtained some significant differences in the dilution prediction. Kikkert et al. (2007) [
14] investigated the behavior of negatively buoyant jets with angles ranging from 0° to 75° and Froude numbers ranging from 14 to 99. The results showed good predictions for the outer spread and the maximum height of the outer edge. However, the inner spread was under-estimated and the minimum dilution prediction was conservative. Along with this, previous studies conducted with CorJet and VisJet models were compared with this study, and it was found that these numerical models had under-predicted the horizontal and vertical locations of maximum jet height. Furthermore, CorJet and VisJet were not accurate enough for an integrated dilution prediction compared to analytical solutions and the data obtained in a study by Kikkert et al. (2007) [
14]. Jirka (2008) [
15] performed a study with smaller angles, such as 30° and 45°, based on laboratory experiments and numerical modeling using the CorJet model. It was found that the lower angle resulted in higher dilution when the bottom slope was taken into consideration, as it provided better offshore transport of the mixed effluent. Kheirkhah Gildeh et al. (2015) [
16] performed numerical modeling with 30° and 45° inclined dense jets. Five CFD models including LRR, RNG k-ε, Realizable k-ε, non-linear k-ε, and Launder Gibson were applied, and it was concluded that LRR and realizable k-ε turbulence models resulted in better predictions for mixing and dilution characteristics.
With the development of computing systems in recent years, the application of combined Fuzzy and AI methods has been increasing in engineering problems. Neshat et al. (2012) [
17] used ANFIS models for the optimization of concrete mix designs. They found that the ANFIS model can be better than traditional fuzzy systems and non-fuzzy systems. In a study by Nadia et al. (2020) [
18], ANFIS was applied for the prediction of the position of the sun in single- and dual-axis solar tracking systems in an attempt to optimize their performance. The results showed a clear advantage of ANFIS over traditional fuzzy methods with high prediction rates and low error values. Heydary et al. (2021) [
19] adopted a combined Fuzzy GMDH (i.e., Group Method of Data Handling) Neural Network and Grey Wolf Optimization (GWO) Algorithm to predict the power produced by wind turbines with consideration of supervisory control and data acquisition (SCADA) data. They first applied a combination of K-means and density-based Local Outliers methods (hybrid K-means-LOF) to remove data outliers and the Empirical Mode Decomposition (EMD) method for the decomposition of SCADA data, and then used the GMDH method to predict the future power generation of wind turbines. They found that the performance of a hybrid EMD-FGMDH-GWO can lead to high accuracy, regardless of the time step applied.
Apart from conventional Computational Fluid Dynamics (CFD) and experimental measurements, soft computing methods could be applied to minimize the computational time for the simulation and investment of money on expensive laboratory equipment. Pourtousi et al. (2015) [
20] investigated the combination of the CFD and ANFIS methods for the simulation of bubble column hydrodynamics. Previous experimental data were used to validate the CFD model and later these data were used to train the ANFIS model. It was concluded that ANFIS was a promising method for predicting the outputs of bubble column hydrodynamics. Taghavifar et al. (2015) [
21] worked on the assessment of heat accumulation in a hydrogen engine, in which the experimental data were compared with the data obtained after CFD modeling to determine the accuracy between the two. Later, the CFD data were fed an ANFIS code to train the model and it was concluded that the ANFIS model with a Triangular membership function had given the highest R-squared (R
2) and lowest root mean squared error (RMSE) value out of other membership functions, and ANFIS was confirmed to be more accurate and simpler than CFD technique in the study. Rezakazemi et al. (2017) [
22] evaluated three models, namely ANFIS, ANFIS-PSO, and ANFIS-GA, to determine the performance of hydrogen mixed membranes, in which input parameters such as feed pressure and Nano filter contents were used to evaluate the output parameter (hydrogen gas selectivity). The criteria for investigation of the better model were R
2 and RMSE values and ANFIS-PSO had given better predictability. Amirkhani et al. (2015) [
23] studied the performance of ANN and ANFIS models to estimate the inlet air velocity of the chimney. Three days of experimental data were used to train the models and it was found that the ANFIS model’s results were closer to the experimental results as its R
2 was higher than ANN. Bonakdari and Zaji (2018) [
24] worked on the modified triangular side weir, in which they simulated its discharge coefficient. They studied three different methods of ANFIS, namely ANFIS-GA, ANFIS-PSO, and ANFIS-DE, with combinations of eight different input variables and it was found that ANFIS-DE performed better as it had given lowest the RMSE value compared to ANFIS-GA and ANFIS-PSO. Shabanian et al. (2017) [
25] studied the ANFIS model with eight types of membership functions to predict the hydrogen yield of the jet fuel and efficiency of conversion for a non-catalytic filtration combustion reactor. Later, an imperialist competitive algorithm (ICA) was applied to get the optimized results for the hydrogen yield, which was found to be an efficient algorithm for the combustion process optimization. Apart from a soft computing method, multi-gene genetic programming (MCGP) is also a new approach to predict the output, as shown in the study conducted by Yan and Mohammadian (2019) [
26], where MCGP turned out to be a promising method for the prediction of vertical buoyant jets.
Currently, there is a gap in the application of AI methods in the context of inclined dense jets, which are among the most efficient mixing methods. In particular, to the best of the authors’ knowledge, no previous study has used an ANFIS model and its variants for negatively buoyant jets with an inclination. Such a method can bridge the gap between AI methods and the simulation of inclined dense jets and can potentially simulate these problems more efficiently than CFD methods. The aim of the current study is to consider the application of new AI methods and the generation of data for the testing and training of these models to find the optimum solutions. The main contribution of this project is to apply new AI methods to simulate and predict the dilution of inclined dense jets in the near-field zone. The proposed approach, as shown in this paper, can accurately and efficiently simulate these jets and contribute towards mitigating the negative environmental impacts of such jets. The discharged effluents can create irreversible damage to the marine environment and aquatic life if the outfall systems are not designed properly. The improper design of the system can also leave toxic contaminants in the coastal area. Hence, it is important to design proper outfall systems with efficient mixing. Furthermore, if the concentration of the effluents is determined before their discharge, then it would be helpful in the implementation of the solutions. The salinity of the discharged effluents can either be predicted by experimental or numerical methods, however, to avoid the cost of experimental equipment and save computational time, artificial intelligence techniques can be implemented in the coastal study. The aim of this research is to investigate the application and performance of a soft computing method with ANFIS, ANFIS-GA, ANFIS-PSO, ANFIS-FFA algorithms for negatively buoyant jets to predict the dilution and mixing characteristics. This is the first study on this topic. Negatively buoyant jets are considered for a wide range of Froude numbers, i.e., 5, 10, 12.5, 15, 17.5, 20, 22.5, 25, 27.5, 30, 32.5, 35, 37.5, 40, 50 and 60 with angles ranging from 20 degrees to 72.5 degrees using realizable k-ε model turbulence model in the OpenFOAM platform [
27,
28].
5. Discussion
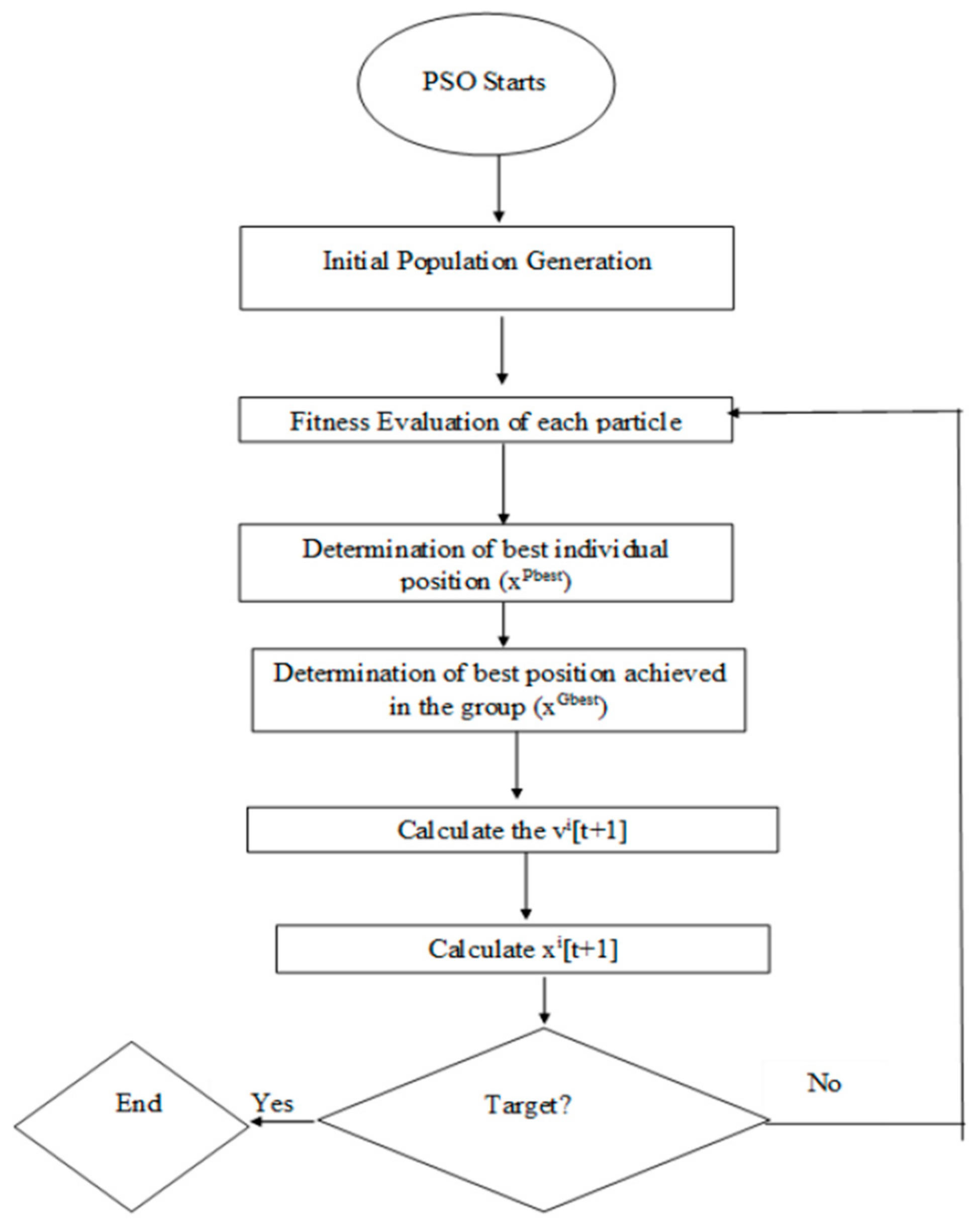
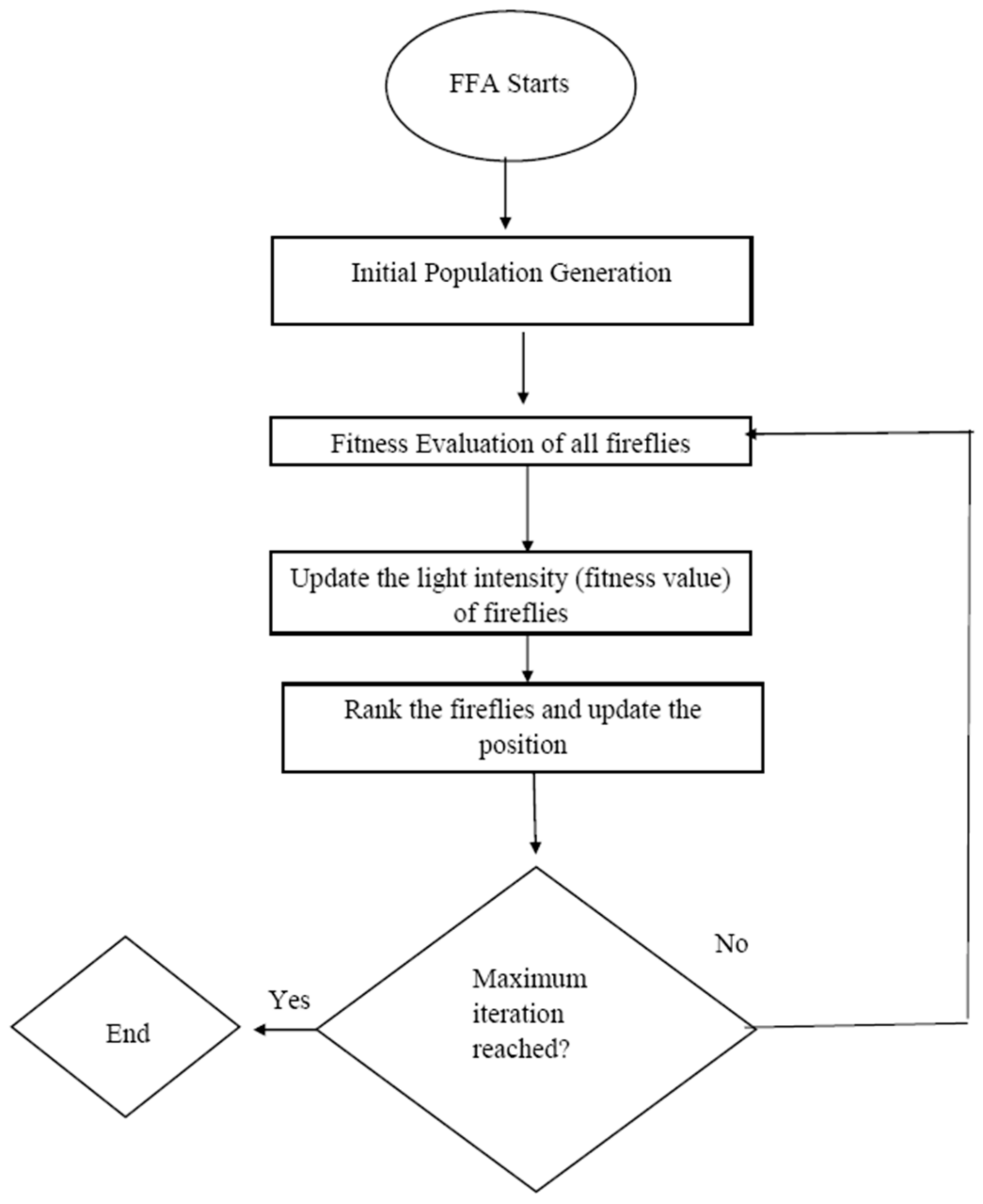
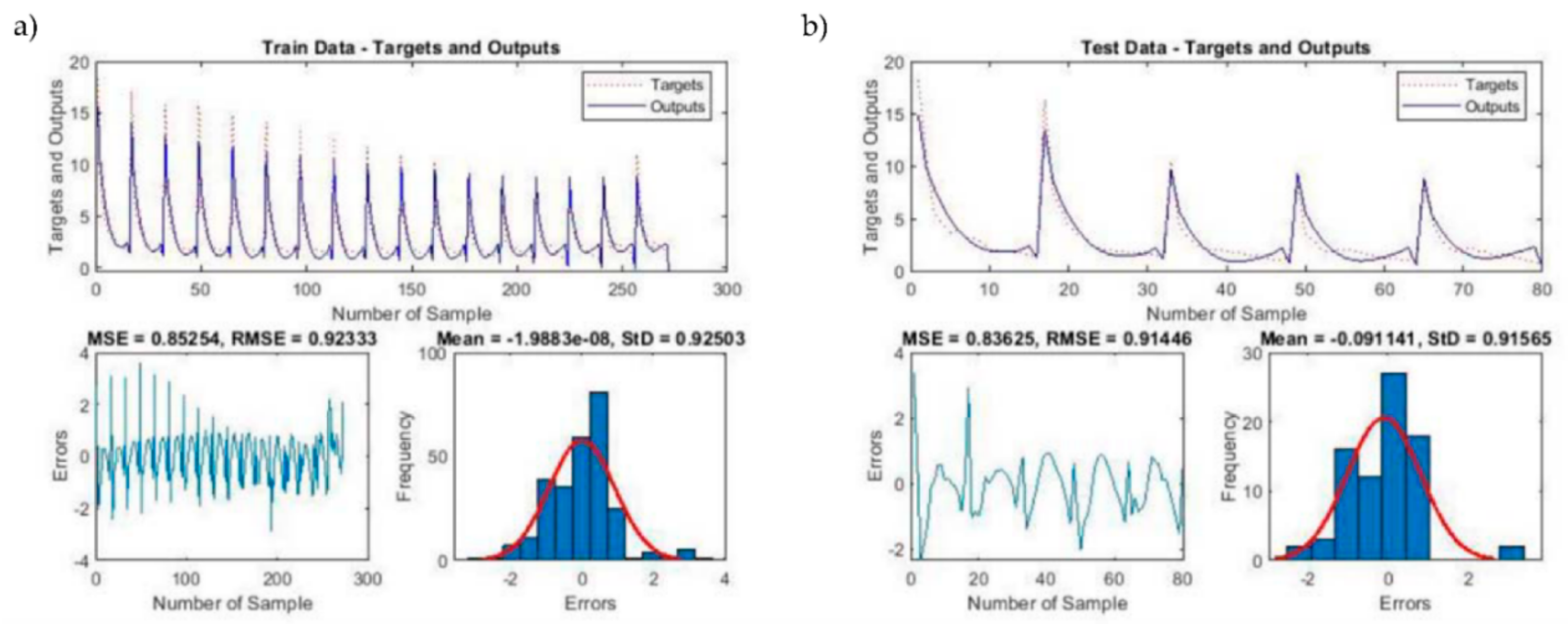
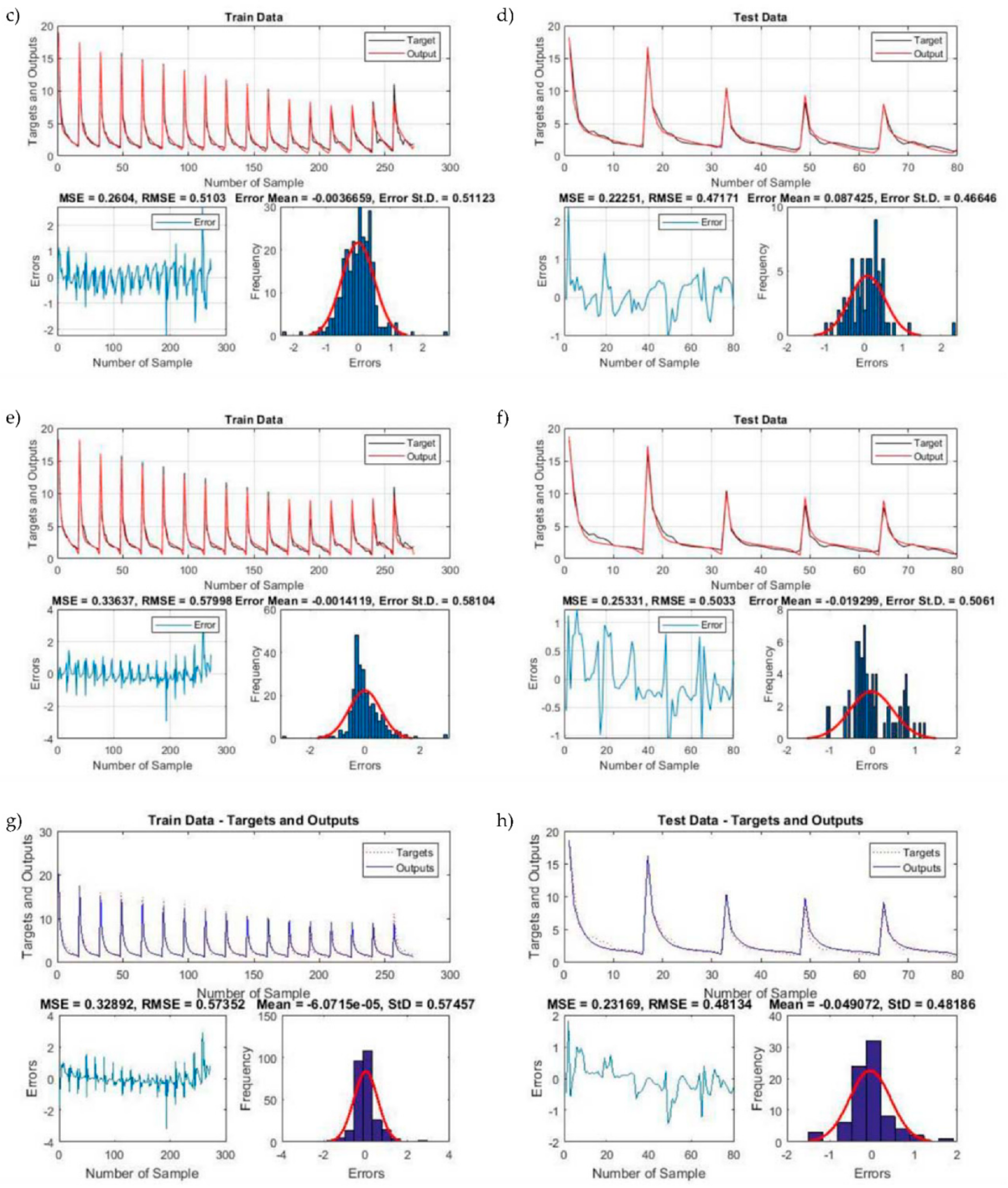
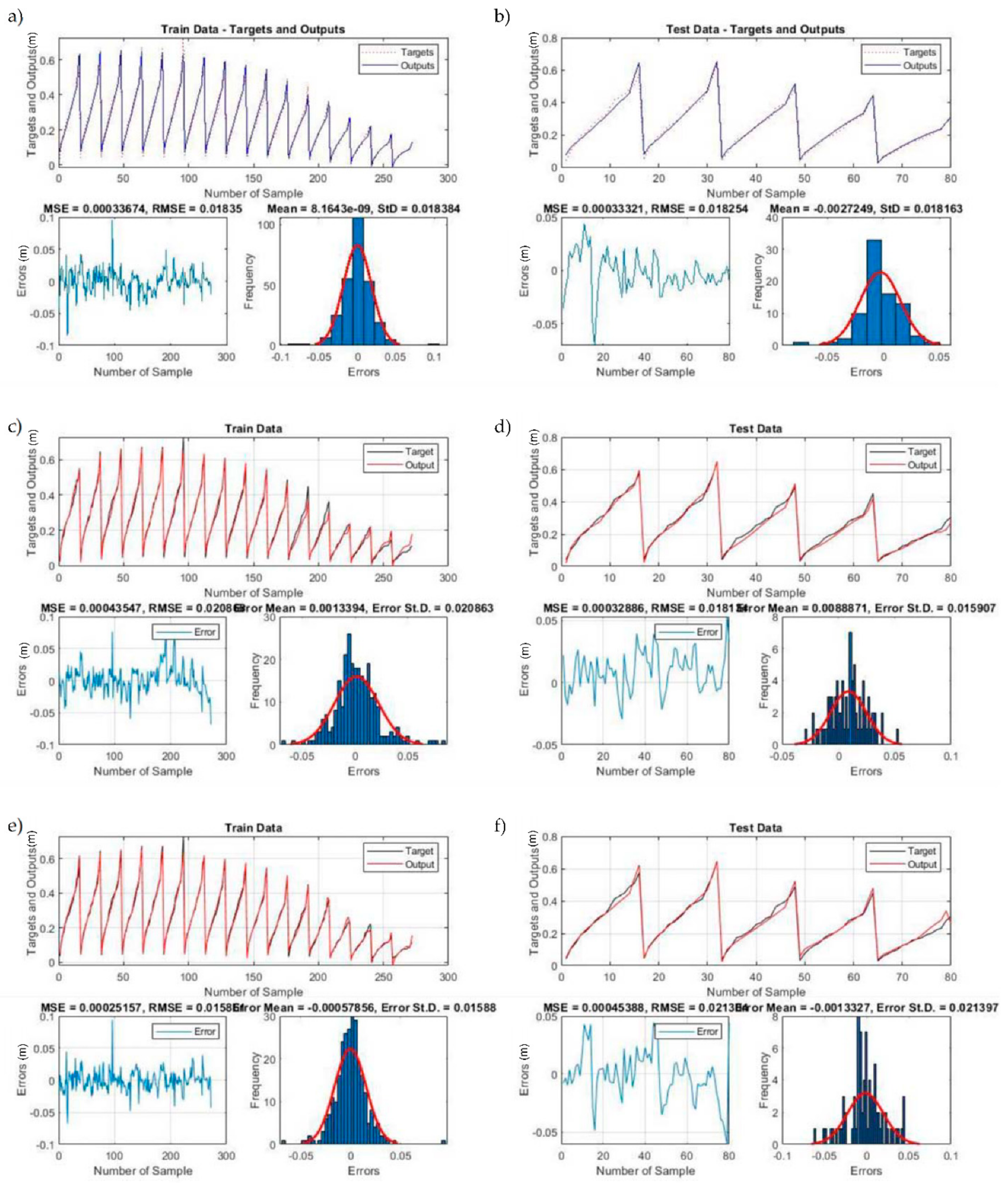
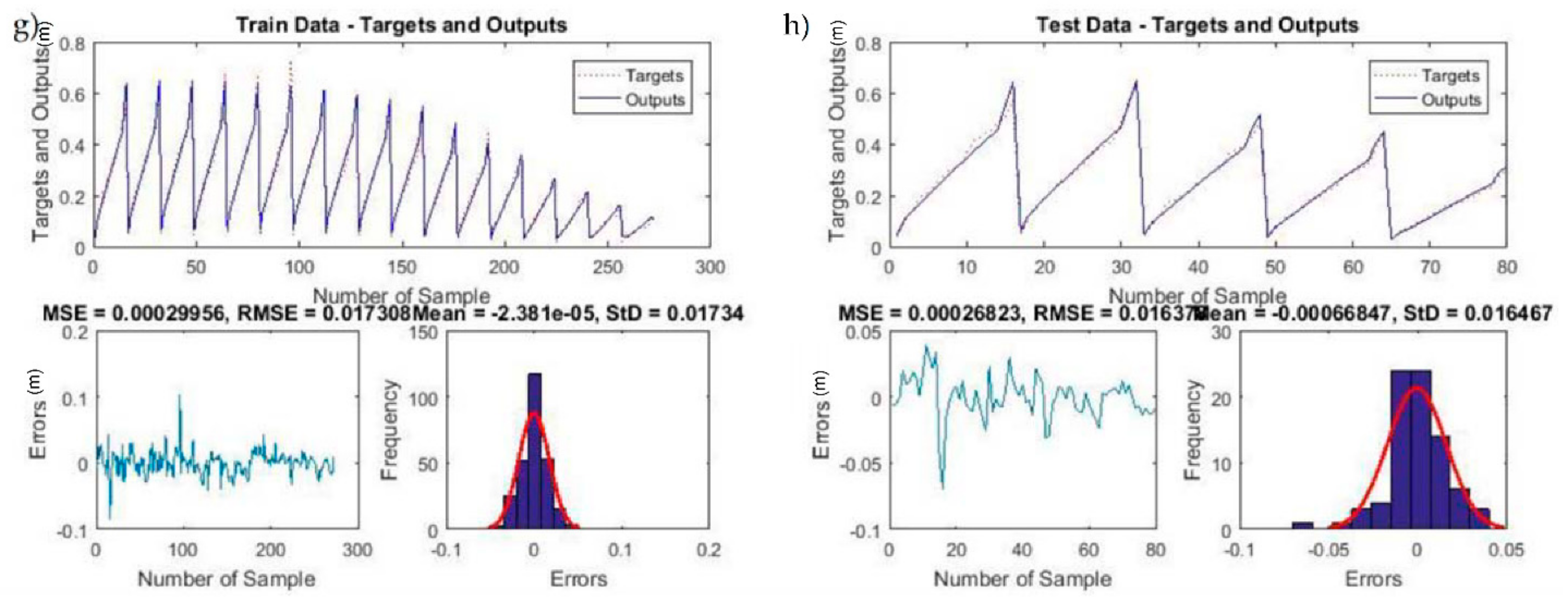
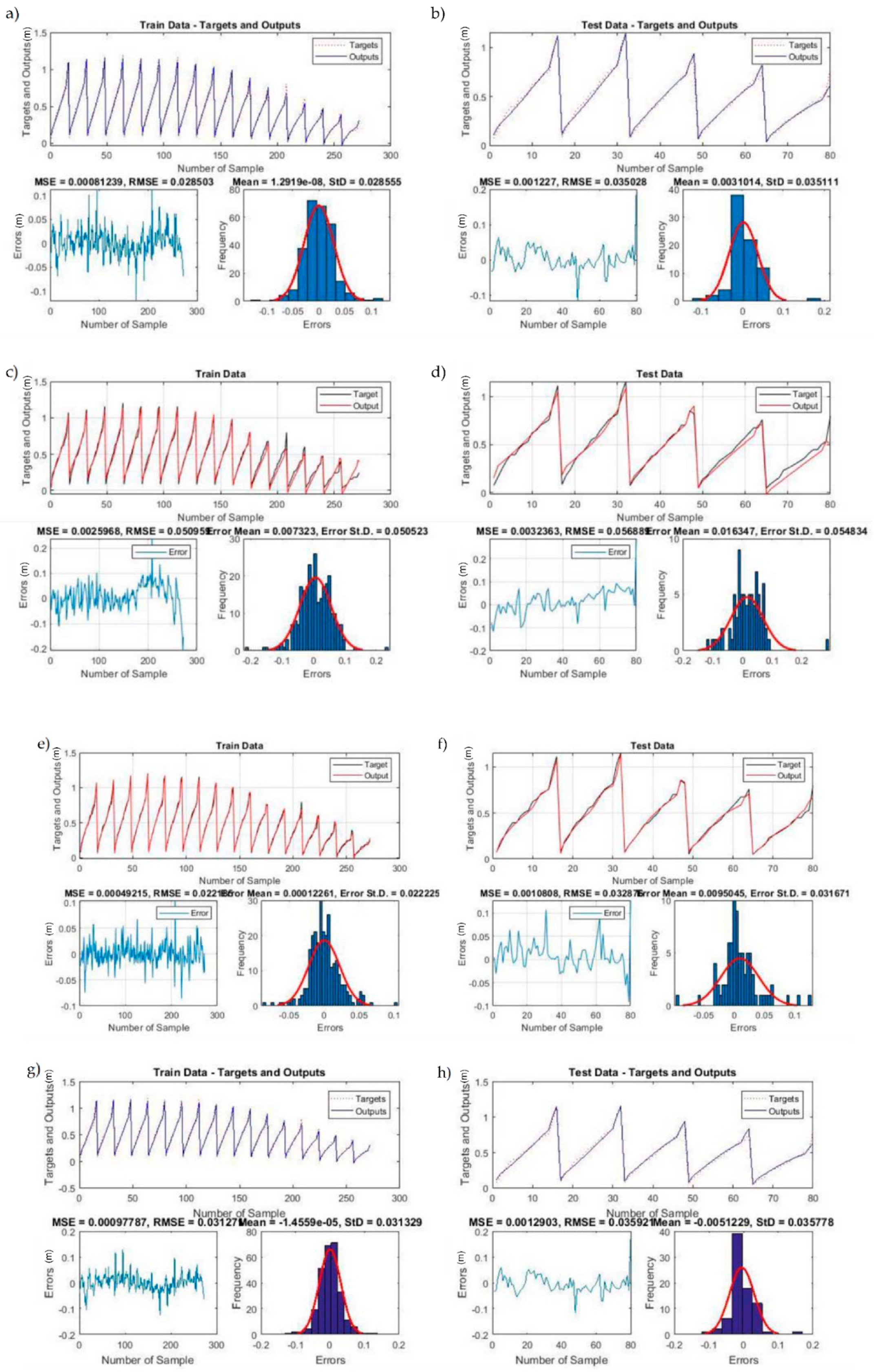
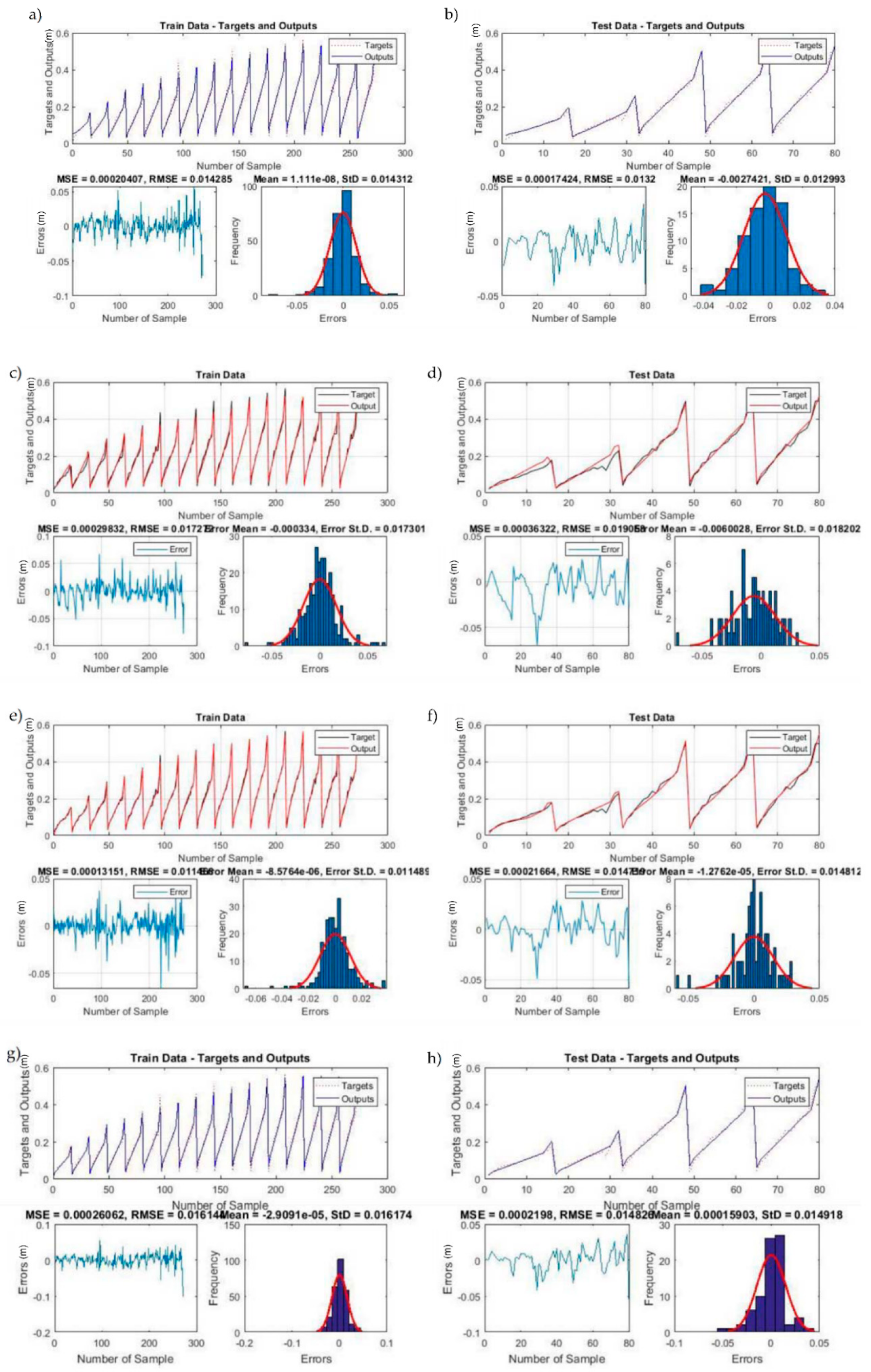
In this paper, the ANFIS model was incorporated with three different algorithms, namely, the Genetic Algorithm, Particle Swarm Optimization, and Firefly Algorithm. Also, to check the linearity of the data, a multivariate linear regression (MLR) was conducted. It was found that the coefficient of determination was too low for MLR, and root mean squared error (RMSE) was too high compared to ANFIS and hybrid ANFIS models. Four statistical indices were measured to determine the efficient model, and they were the coefficient of determination, root mean squared error, mean absolute error, and percentage deviation. Furthermore, to determine the reliable model, the statistical indices of the test set were compared for all the models. It could be seen that, for all the ANFIS-type models, over-fitting was not observed, which showed the models were trained well.
For different outputs, different models showed accuracy. Hence, to evaluate the overall model performance, the average of all the statistical parameters needs to be calculated. It could be seen from
Table 7 that ANFIS-PSO and ANFIS-FFA generated the same value for
R2, i.e., 0.980. Also, the RMSE values of these models are lower than the rest of the models, i.e., 0.231 and 0.257, respectively. It could also be seen that the training data of ANFIS-PSO is better compared to ANFIS-FFA as the training set of ANFIS-PSO’s
R2 value was 0.983. The model, which showed the poor performance, was MLR as it had the lowest
R2 value, i.e., 0.733, and highest RMSE value, i.e., 1.090. The present study will be helpful in coastal research worldwide it is one of the first studies on artificial intelligence models in negatively buoyant jets for predicting effluent discharges in less computational time as the computational fluid dynamic model had taken approximately three and half days for simulation compared to the ANFIS-type models, which had taken ten to fifteen minutes.
Additionally, as AI techniques are widely used in the majority of sectors worldwide, it would be interesting to see their implementation in coastal studies. Most of the previous studies have been conducted using computational fluid dynamics models, and this is one of the first studies to have implemented artificial intelligence models in negatively buoyant jets. The study is also an extension of the Kheirkhah Gildeh et al. (2015) [
16] study and it can be seen that the ANFIS-type models have performed as well as the CFD model, with less computational time. Although, as mentioned earlier, the present study is one of the first studies using AI models in coastal systems, there are some studies conducted on different coastal topics such as the Bonakdari and Zaji (2018) [
24] study on the side weir discharge coefficient, which was modeled using ANFIS-type models. Yan and Mohammadian (2019) [
26] studied the Multi-Gene Genetic Programming (MGGP) method for vertical buoyant jets to determine dilution properties. The approach, MGGP in this study, was efficient and accurate, hence, it can also be used to examine the present study on negatively buoyant jets for future work. Furthermore, in future work, several different algorithms such as Differential Evolution (DE), Ant Colony (ACO), Cuckoo Optimization Algorithm (COA) could also be merged with ANFIS to broaden the area of negatively buoyant jet study.
Furthermore, parameters such as temperature, sloping bed, density current, rosette diffuser, effects of stratification on various types of discharges with or without current, effects of secondary flow, various types of jets under wave effect, or current effect can also be considered. Other statistical parameters such as Scatter Index, BIAS, Nash, VAF can also be checked for performance evaluation. Along with this, positive and negative jets can be examined for crossflow using various AI methods such as ANFIS type procedures.
As the errors and performance results in
Table 7 show, hybrid models such as ANFIS-PSO and ANFIS-FFA, in comparison with ANFIS, present lower error estimates and overall, more accurate solutions. However, the hybrid models have a higher computational cost. Therefore, the application of these models depends on the desired accuracy and the availability of computing systems. In other words, there is no single answer as to which model is to be selected.
It should be noted that this project did not attempt to train the model and validate it using real-time data, which is the subject of a subsequent study, in order to extend the use of the model to more practical applications.
6. Conclusions
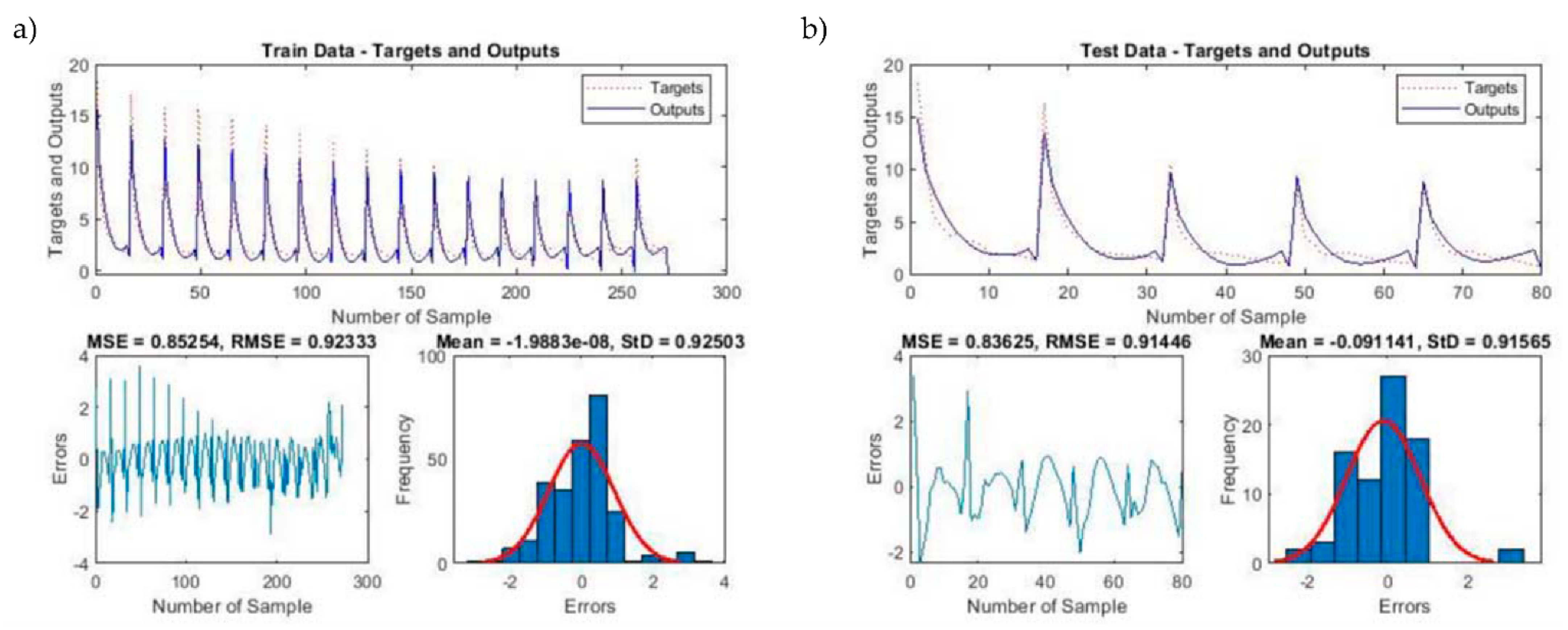
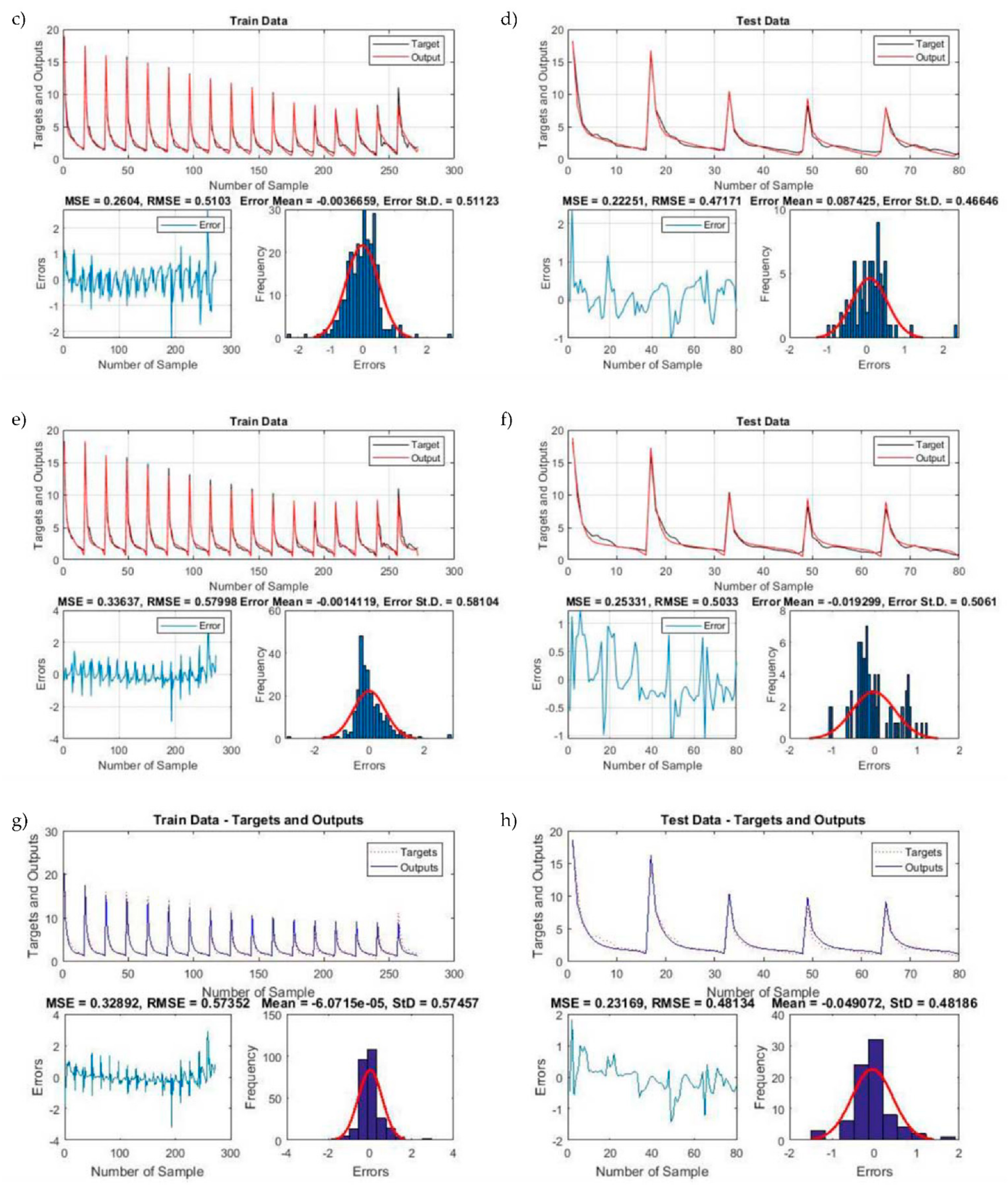
ANFIS model alone and different hybrid models such as ANFIS-GA, ANFIS-PSO, and ANFIS-FFA along with multivariate regression were investigated for the prediction of industrial outfall discharges. In this paper, negatively buoyant jets are focused. Proper outfall design is one of the important factors to mitigate the environmental effects of effluent discharge from desalination plants. With prior knowledge of effluents’ discharge characteristics, it is easier to implement proper solutions. Though most of the studies have been conducted using experimental and numerical methods, in this study, the ANFIS type models are examined for lesser computational time and to avoid the cost of an experimental setup. The results showed that ANFIS and hybrid models were trained properly, which could be seen from targets and output graphs in
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
Figure 11 as they almost coincided with each other. However, the results showed that the multi-variate regression model was not successful in interpreting the relationship between independent and dependent variables, especially due to the non-linearity of the data. Hence, ANFIS and hybrid models are suitable choices to predict the dilution characteristics of outfall discharges. To determine the efficient model to predict all the outputs mentioned in the previous section, it can be deduced from
Table 7, which is generated by averaging all the outputs that ANFIS-PSO has the highest
R2 value, lowest RMSE, and lowest MAE. The other model which showed the same
R2 value to ANFIS-PSO is ANFIS-FFA, however, its RMSE value and MAE value are 0.257 and 0.166, respectively, which are a little higher than ANFIS-PSO. Furthermore, the difference observed between ANFIS-PSO and ANFIS-FFA was in their computational time, which was more for ANFIS-FFA at around 3.5 h compared to ANFIS-PSO, which was 10–15 min. Although, the computational time for all the ANFIS-type models was much less compared to the CFD model, which was approximately around 3.5 days. Overall, these two models, ANFIS-FFA and ANFIS-PAO, can be considered suitable for predicting the effluent discharge, although ANFIS-PSO would be preferable when one considers computational cost as a deciding factor.
The results presented in
Table 7 demonstrate that hybrid models (especially ANFIS-PSO and ANFIS-FSA) overall, provide better results with lower errors than ANFIS. However, if one is looking for a quicker answer, ANFIS alone provides results within an acceptable margin of error and can be used.
The use of real-time data for training and validation of the model can be examined in a future study to enhance the practical applicability of the model.

 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}