1. Introduction
In the 1970s, multiplicative calculus was introduced by Grossman and Katz [
1]. Many scholars applied multiplicative calculus in various branches. In 2008, Bashirov et al. [
2] discussed the theoretical foundations as well as various applications of multiplicative calculus. Florack and Van Assen [
3] used multiplicative calculus in biomedical image analysis. Filip and Piatecki [
4] used it to investigate economic growth. In addition, Mısırlı Gurefe [
5], Riza et al. [
6], and Özyapıcı and Mısırlı [
7] used multiplicative calculus to develop multiplicative numerical methods. On the other hand, Bashirov et al. [
8] adopted it for the development of multiplicative differential equations. Furthermore, Bashirov and Riza [
9] and Uzer [
10] extended the multiplicative calculus to include complex-valued functions of complex variables, which was previously applicable only to positive real-valued functions of real variables. Recently, Goktaset al. [
11] described the multiplicative derivative and its basic properties on time scales.
From the above discussion, it is straightforward to say that the multiplicative calculus approach is a very important part of applied mathematics, computational engineering, and applied sciences [
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22]. In the last few years, researchers used multiplicative derivatives for the development of new iterative schemes for the solutions of nonlinear equations before starting the applicability of the Multiplicative Calculus Approach (MCA) on iterative methods. We have to know some information about iterative methods. These methods can be divided on the basis of: memory (with or without), substeps (one-point or multi-point), and convergence (local and global). Local and global convergence is one of the important divisions of iterative methods. Local and global methods are also known as open and closed-bracket methods, respectively. The local convergent methods are normally faster than the global methods but not always convergent as global methods. Newton’s method and the bisection method are two famous examples of local and global methods, respectively. We have very limited globally convergent methods. On the contrary, we have a plethora of locally convergent because of the faster convergence and easy applicability on nonlinear equations [
23,
24,
25,
26,
27,
28,
29]. Therefore, we also focus on locally convergent methods in this study.
In recent years, scholars such as Özyzpici et al. [
30] and Ali Özyzpici [
31] adopted the multiplicative calculus approach for the development of one-point iterative methods. We know that one-point methods have many problems regarding their order of convergence and efficiency index (for more details, please see Traub [
32]). So, many scholars turned toward the optimal multi-point methods, which is one of the most important classes of iterative methods. According to our best knowledge, we did not have any optimal/non-optimal multi-point iterative method with a multiplicative calculus approach that can handle the solution of nonlinear equations. Finding the multi-point iterative methods with a multiplicative calculus approach is not an easy task. A few main reasons behind this are optimal order of convergence, lengthy and complicated calculus work, and the theoretical proof of an order of convergence requiring a higher efficiency index.
Keeping these things in mind, we suggest a new multi-point iterative technique by adopting the multiplicative calculus approach. Two main pillars of a new scheme are: the multiple calculus approach and the well-known King’s method [
33]. The detailed convergence analysis is proposed in the main theorem. For a fair comparison of our methods with the existing methods, we choose six different ways: (i) absolute error difference between two consecutive iterations, (ii) order of convergence, (iii) number of iterations, (iv) CPU timing, (v) the line graphs of absolute errors, and (vi) bar graphs. On the basis of six different ways of comparison, we conclude that our new King’s scheme performs much better in comparison to the existing methods. Finally, we study the basin of attraction which also supports the numerical results.
The remaining content of the paper is summarized in the following.
Section 2 discusses the definition and basics terms of multiplicative calculus. The proposed method and its convergence analysis are presented in
Section 3. The numerical results are depicted in
Section 4. The basins of attraction of the proposed method are discussed in
Section 5. Finally, the conclusion is given in
Section 6.
3. The Proposed Method and Analysis of Convergence
The proposed King’s iterative method in the multiplicative derivative is represented as
where
q is the iteration step,
is the multiplicative derivative, and
is a free parameter.
For convergence analysis, we have proved the following theorem.
Theorem 3. For an open interval I, let be a multiplicative zero of a sufficiently multiplicative differential function ; then, the multiplicative King’s method has a fourth order of convergence with error
.
Proof. Let
r be a simple root of equation
and
be an error at the
iteration. Using the multiplicative Taylor expansions (
4) for function
, it can be written as
If we take the natural logarithm on both sides, we obtain
where
.
On the other hand, we have
On dividing Equation (
9) by (
10), we have
Now, by subtracting the root
r on the sides of the first step of scheme (
7) and using Equation (
11), we obtain
By using the multiplicative Taylor expansion upon
about
r, we obtain
As a result of taking the natural logarithm from both sides, we obtain
Using Equations (
9) and (
10), we have
Again, subtracting the root
r on both sides in (
7) and using (
12) and (
15), we obtained the final error of scheme
Hence, the method (
7) has a fourth order of convergence. □
4. Numerical Examples
In this section, we solve the nonlinear equation
using the ordinary King’s method [
33] denoted as (
,
,
, respectively), Chun method [
35] denoted as (
), Jnawali method [
36] denoted as (
) and the proposed multiplicative King’s method denoted as (
,
,
, respectively). The results obtained using these methods are presented in
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6 and
Table 7. All computations have been completed in Mathematica version 11.1.1 software and the stopping criteria
and
are used. Moreover, the approximated computational order of convergence (ACOC) is computed by using the following.
Remark 1. The meaning of expression is and d represents that the scheme is divergent in all the tables.
Example 1. Firstly, we consider the population growth model that formulates the following nonlinear equationIn this model, we evaluate the birth rate denoted as x if a specific local area has 1,000,000 people at first and 435,000 move into the local area in the first year. Likewise, assume 1,564,000 individuals toward the finish of one year. The computed results toward the root are displayed in Table 1. Clearly, the proposed methods show better results in terms of consecutive error and the number of iterations in comparison to existing ones. Example 2. Now, we apply the proposed methods to the improved cubic equation of the state known as Redlich–Kwong. The equation of state relates the molar volume (V), temperature (T), and pressure (P) of a substance defined aswhere , , and R is the universal gas constant. By using , , , and , we obtain the following nonlinear problem to determine V at the critical isotherm.The computed results toward the root are displayed in Table 2. Clearly, the proposed methods show equivalent results in terms of consecutive error and the number of iterations but with less C.P.U time in comparison to existing ones. Moreover, the consecutive error of the proposed methods and original King’s methods seem to be the same, but after a few digits, it is different. Example 3. Using the following nonlinear model, we determine how pressure gradients relate to fluid velocity in porous media.where stands for the radius of the fiber, p shows the specific hydraulic permeability, and is the porosity of the medium. If we assume and , we obtain the following third-degree polynomialIt is clear from Table 3 that the proposed methods approach to the root in fewer iterations and less time than the earlier schemes. Example 4. Next, we apply the proposed method to some of the following academic problems.
- (a)
having approximate root .
- (b)
having exact root .
- (c)
with an approximate root .
- (d)
having approximate root .
In Table 4, Table 5 and Table 7, it is clearly seen that the proposed method shows more effective results as compared to others in terms of absolute error and consecutive error. The errors are reduced at each iteration by four times compared with the error in the previous step. In Table 6, the proposed method converges and gives the results while all other methods fail to converge. Remark 2. Figure 1 represents the error analysis of Examples 1 to 4(d). It is clear from all subfigures of Figure 1 that the proposed method error reduction is faster than existing methods. The figures of Examples 4(a), (b), (c), and (d) represent the divergence of the method , and the figure of Example 4(c) shows that the methods are divergent. In a similar way, iteration comparisons of different existing methods with proposed methods are depicted in Figure 2. Clearly, the proposed method converges to root in fewer iterations compared with other schemes. Furthermore, Examples 4(a), (b), (c), and (d) by the methods , are not approaching the desired root, and these are tested for up to 15 iterations. 5. Basin of Attraction
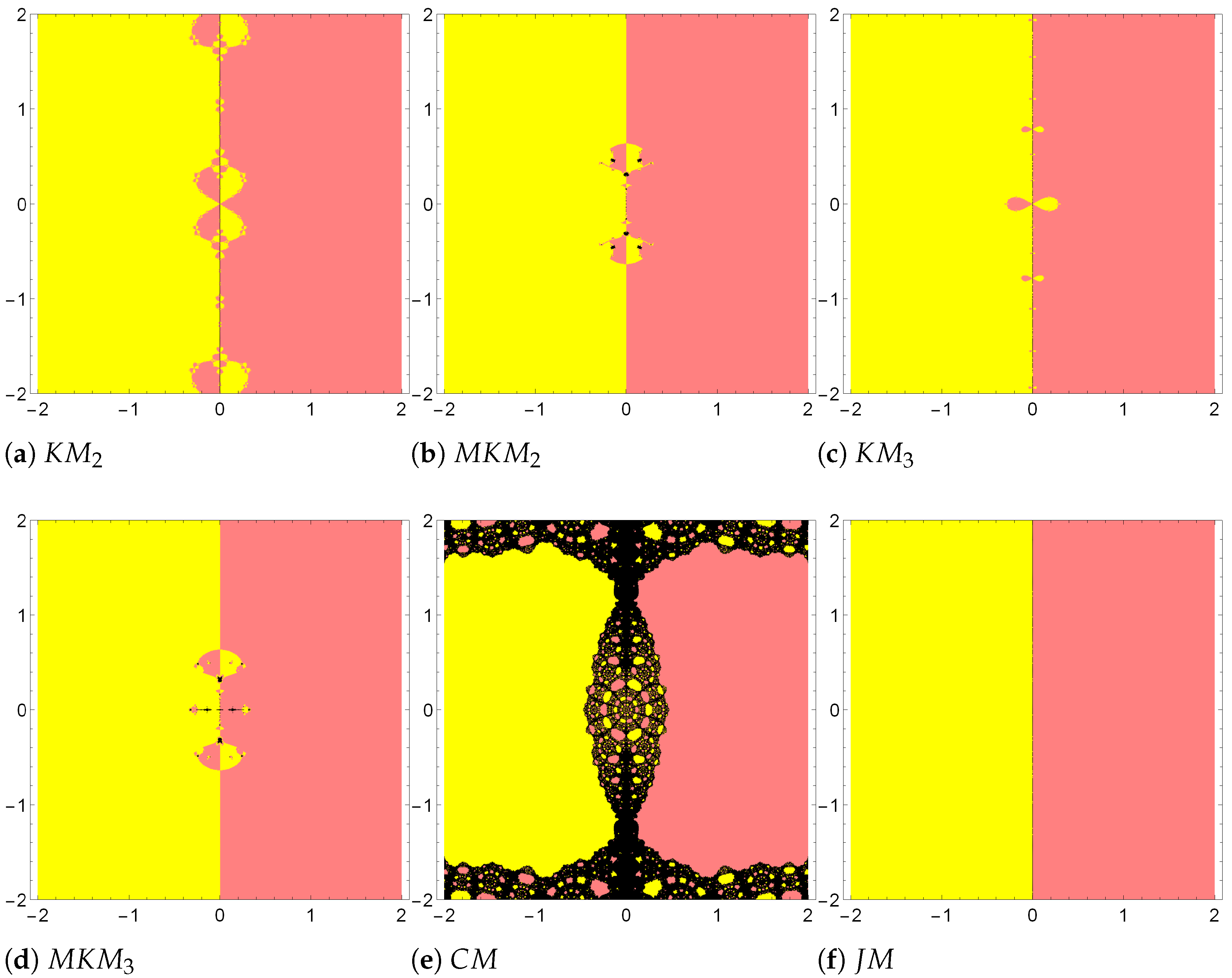
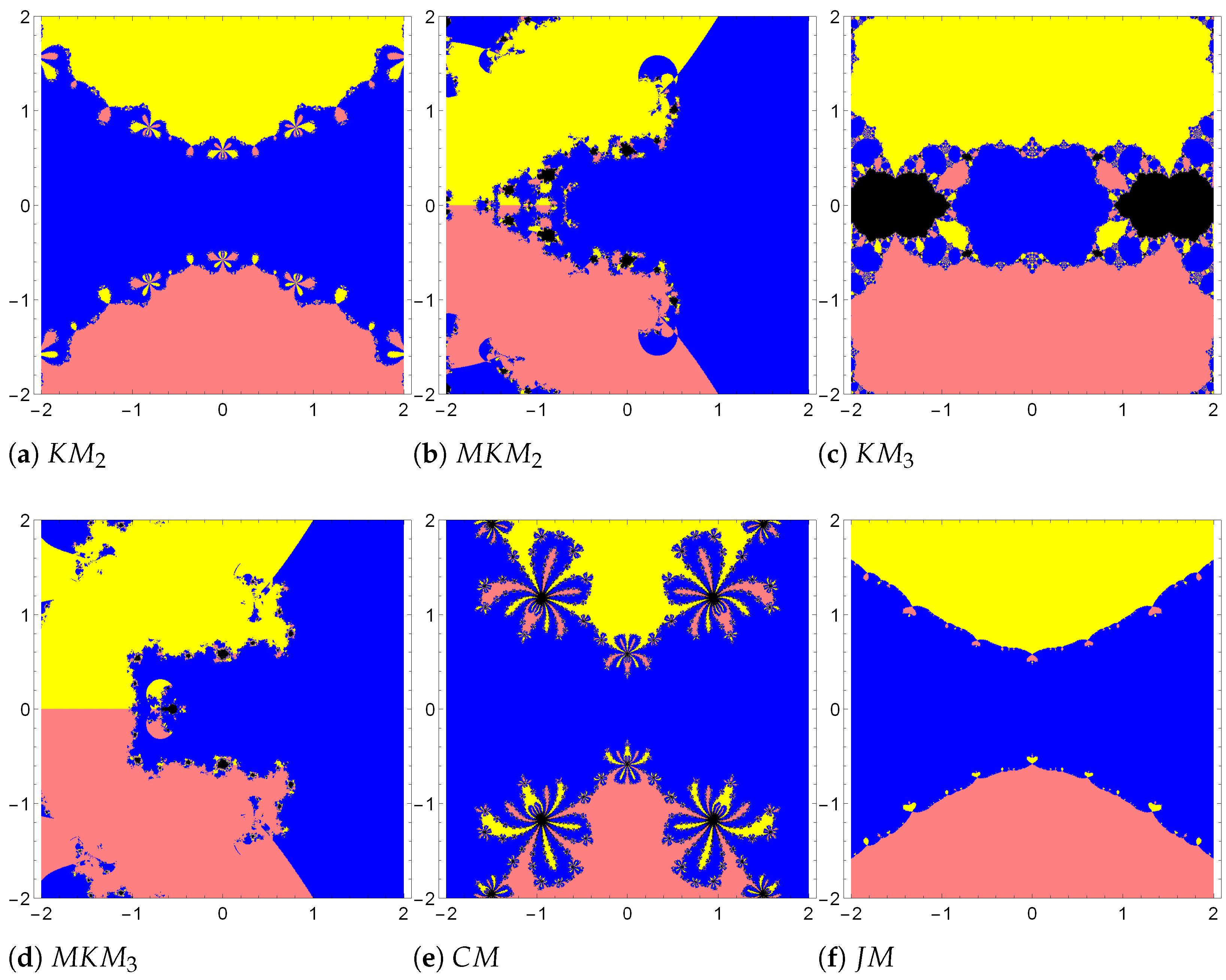
The concept of the basin of attraction confirms the convergence of all the possible roots of the nonlinear equation within a specified rectangular region. So, here, we present the convergence of ordinary King’s methods (
), multiplicative King’s methods (
), Chun method (
), and Jnawali method (
) on different initial values in the rectangular region
by dynamical planes explained in [
37]. In this section, we have tested three problems to analyze the basin of attraction for solving nonlinear equations. Each image is plotted by an initial guess as an ordered pair of 256 complex points of abscissa and coordinate axis. If an initial point does not converge to the root, then it is plotted with black color; otherwise, different colors are used to represent different roots with tolerance
.
Example 5. The scalar equation has the roots . In Figure 3, pink and yellow colors represent the convergence of roots and black color represents the divergence. It is clear that the proposed methods are approaching the desired root. Example 6. The nonlinear equation having the roots is tested and the basin of attraction is shown in Figure 4. The divergence area is significantly smaller in and . Example 7. Lastly, the basin of attraction of the nonlinear equation with roots is shown in Figure 5. It is clear that the methods , and have a more divergent area in comparisons of proposed methods. 6. Conclusions
By adopting the multiplicative calculus approach, we suggested a new fourth-order multi-point iterative technique for solving nonlinear equations. A well-known King’s method and the MCA are the two main pillars for the construction of the new scheme. With the help of the free disposable parameter , we can obtain many new variants of the fourth order. In addition, we studied the convergence analysis of the newly constructed scheme. We compare our methods with the existing techniques on the basis of absolute error difference between two consecutive iterations, order of convergence, number of iterations, CPU timing, the graphs of absolute errors, and bar graphs. We found that our methods provide better approximations, which can be achieved with less computational time and complexity. In addition, the proposed methods provide a stable COC for each example. The only limitation of our method is that the multiplicative derivative approaches or near 1. Furthermore, we also study the basin of attraction which also supports the numerical results. In future work, we will try to extend this idea to the system of nonlinear equations. In this way, this new approach to multiplicative calculus will open a new era of numerical techniques.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}