
Stability Results for a Weakly Dissipative Viscoelastic Equation with Variable-Exponent Nonlinearity: Theory and Numerics


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- The function is a non-increasing function satisfyingwhereand there exists a function which is strictly increasing and a strictly convex function on with such thatwhere is a positive non-increasing differentiable function.
- is a continuous function such thatand whereFurthermore, the exponent satisfies the log-Hölder continuity condition; that isfor any .
3. Technical Lemmas
4. Decay Results
- (2)
- Let , for , and λ selected such that is satisfied. Then,In view of Theorem 1, we deduce that for some constant ,
- (3)
- For letand λ carefully chosen so that is valid. Then,with , and β is a positive constant. It follows from Theorem 1 that for some constants
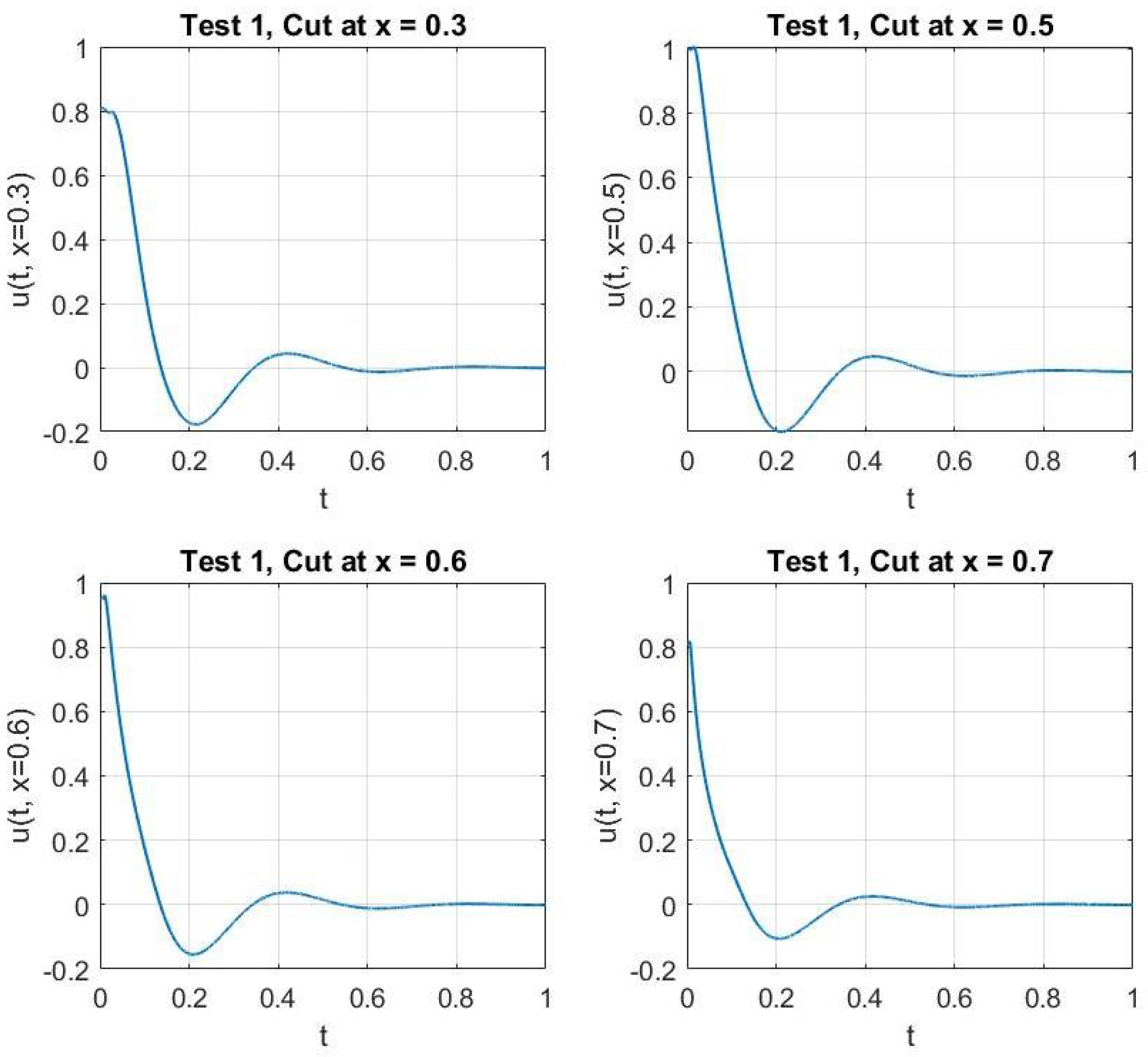
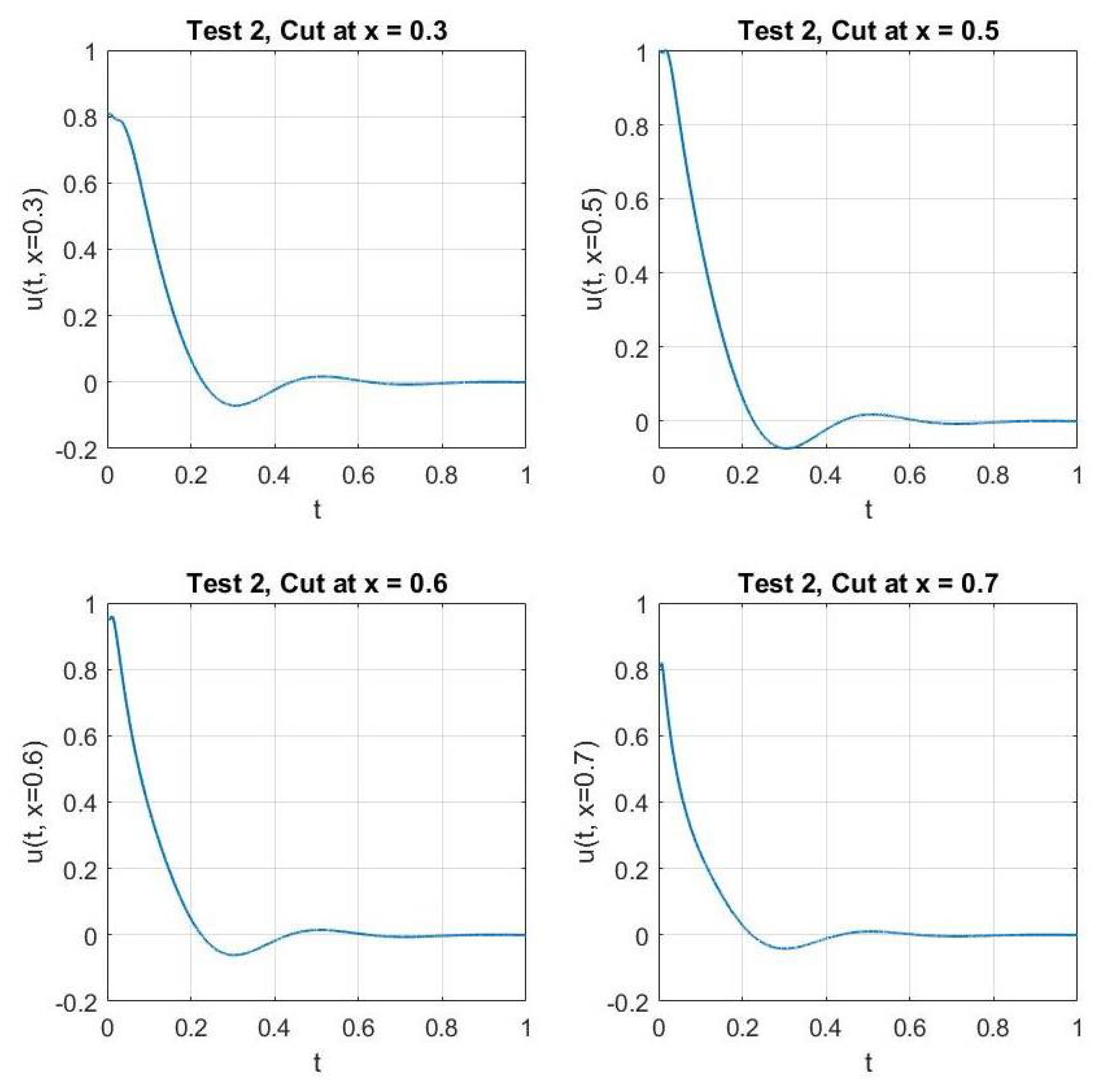
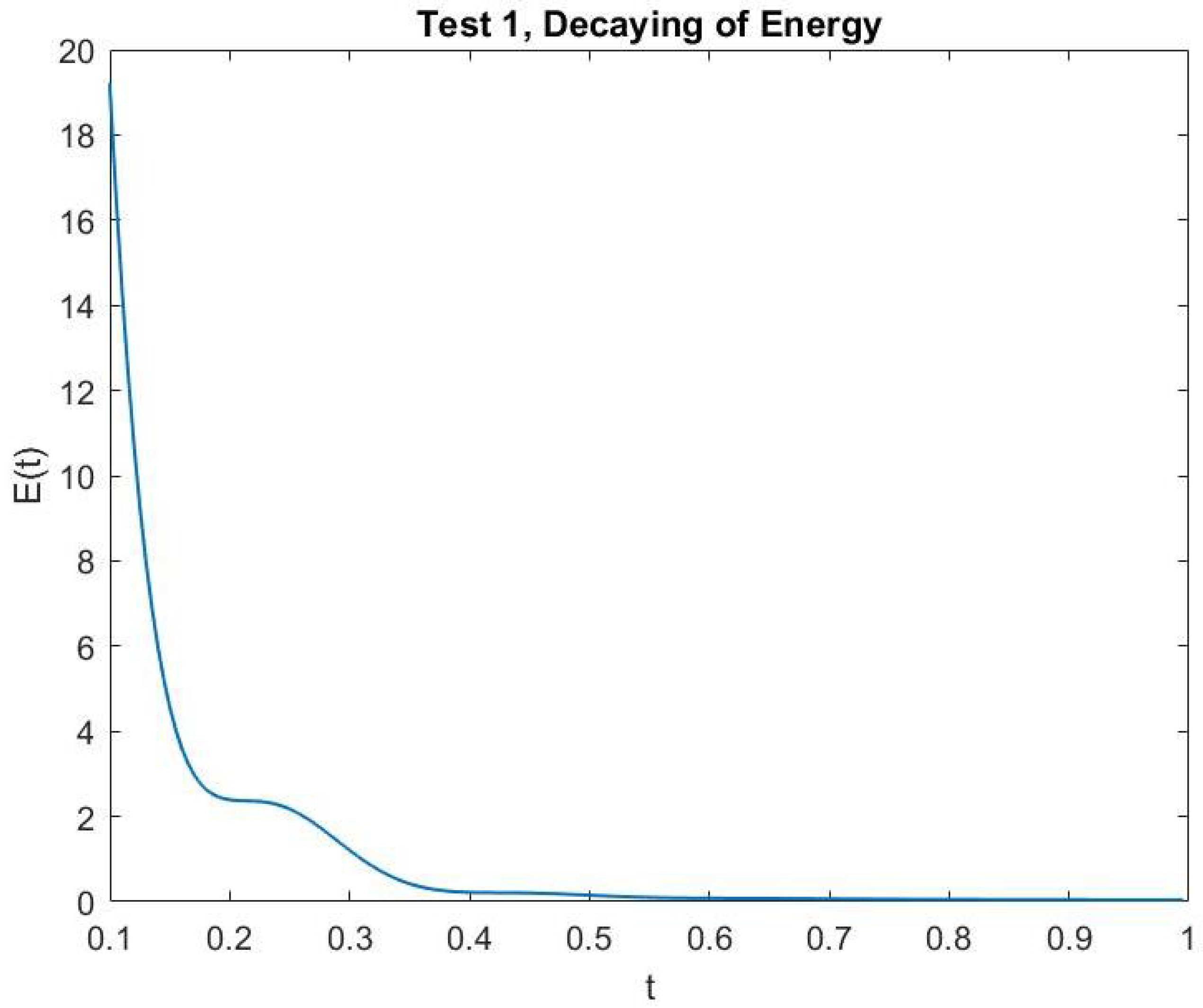
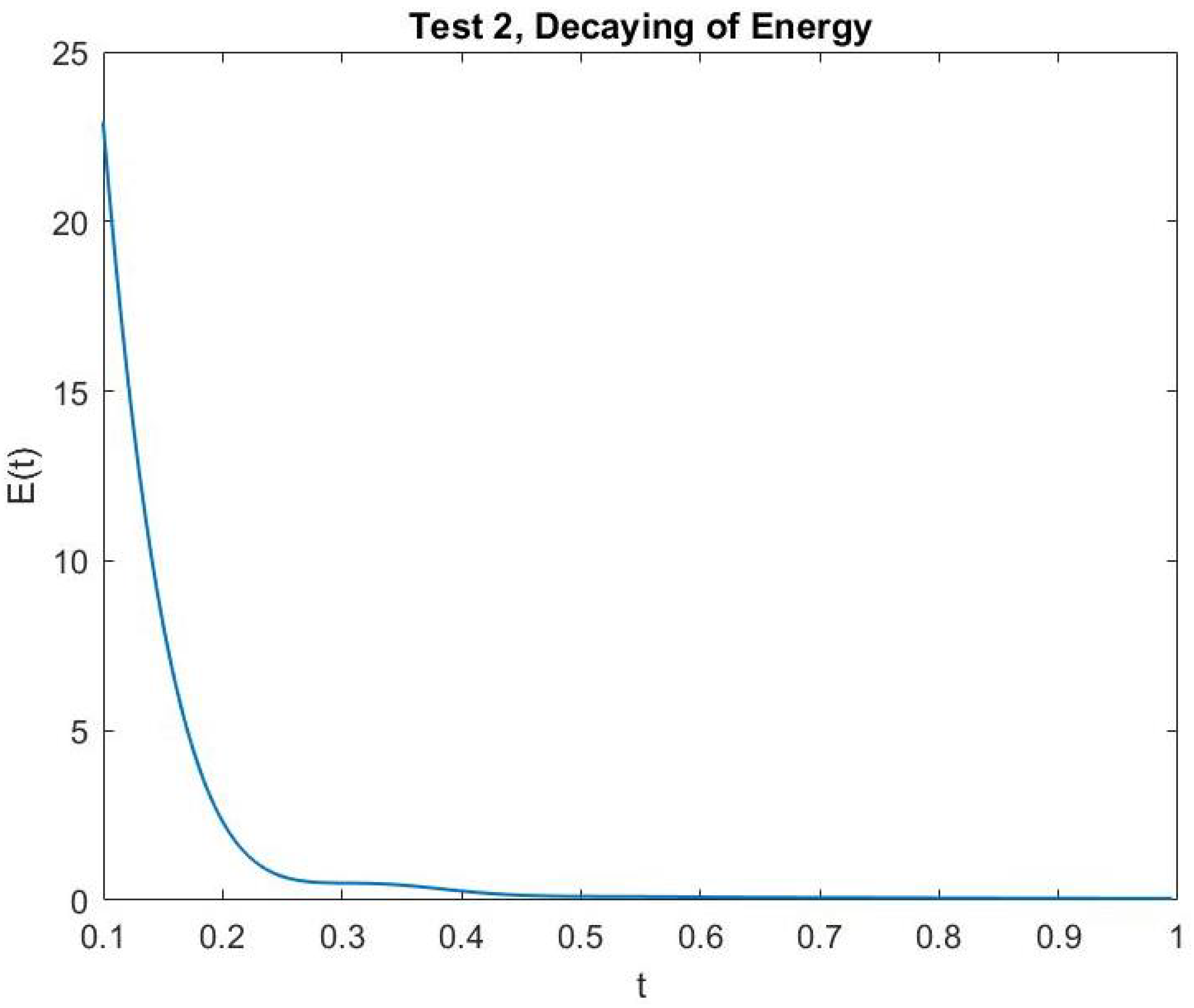
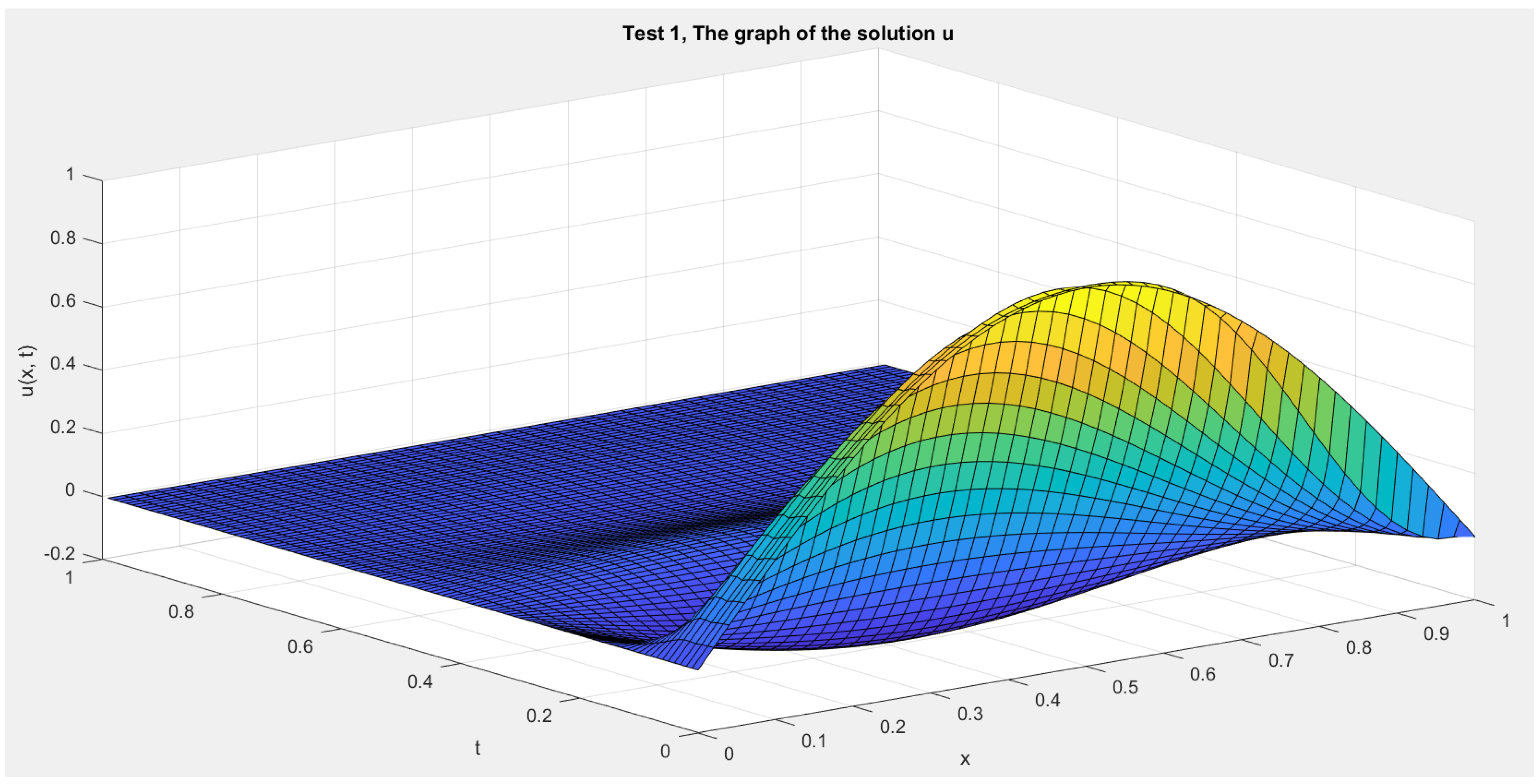
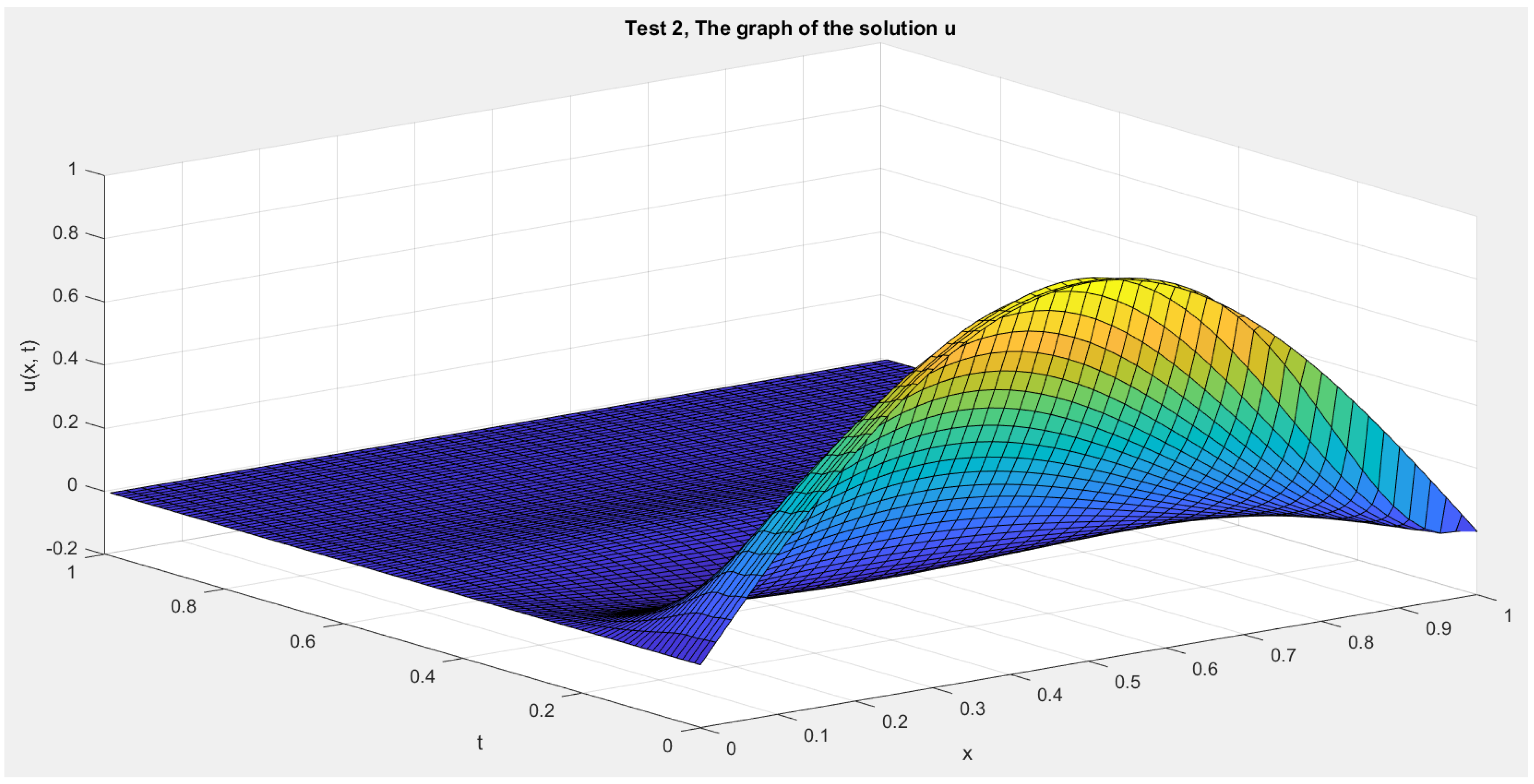
5. Numerical Results
- Test 2: In the second test, we let and .
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rivera, J.E.M.; Naso, M.G.; Vegni, F.M. Asymptotic behavior of the energy for a class of weakly dissipative second-order systems with memory. J. Math. Anal. Appl. 2003, 286, 692–704. [Google Scholar] [CrossRef] [Green Version]
- Hassan, J.H.; Messaoudi, S.A. General decay rate for a class of weakly dissipative second-order systems with memory. Math. Methods Appl. Sci. 2019, 42, 2842–2853. [Google Scholar] [CrossRef]
- Anaya, K.; Messaoudi, S.A. General decay rate of a weakly dissipative viscoelastic equation with a general damping. Opuscula Mathematica 2020, 40, 647–666. [Google Scholar] [CrossRef]
- Acerbi, E.; Mingione, G. Regularity results for stationary electro-rheological fluids. Arch. Ration. Mech. Anal. 2002, 164, 213–259. [Google Scholar] [CrossRef]
- Ruzicka, M. Electrorheological Fluids: Modeling and Mathematical Theory; Springer Science & Business Media: New York, NY, USA, 2000. [Google Scholar]
- Antontsev, S. Wave equation with p(x,t)-Laplacian and damping term: Existence and blow-up. Differ. Equ. Appl. 2011, 3, 503–525. [Google Scholar] [CrossRef] [Green Version]
- Antontsev, S. Wave equation with p(x,t)-Laplacian and damping term: Blow-up of solutions. Comptes Rendus Mécanique 2011, 339, 751–755. [Google Scholar] [CrossRef]
- Guo, B.; Gao, W. Blow-up of solutions to quasilinear hyperbolic equations with p(x,t)-Laplacian and positive initial energy. Comptes Rendus Mécanique 2014, 342, 513–519. [Google Scholar] [CrossRef]
- Messaoudi, S.A.; Talahmeh, A.A. A blow-up result for a nonlinear wave equation with variable-exponent nonlinearities. Appl. Anal. 2017, 96, 1509–1515. [Google Scholar] [CrossRef]
- Messaoudi, S.A.; Al-Smail, J.H.; Talahmeh, A.A. Decay for solutions of a nonlinear damped wave equation with variable-exponent nonlinearities. Comput. Math. Appl. 2018, 76, 1863–1875. [Google Scholar] [CrossRef]
- Messaoudi, S.A. On the decay of solutions of a damped quasilinear wave equation with variable-exponent nonlinearities. Math. Methods Appl. Sci. 2020, 43, 5114–5126. [Google Scholar] [CrossRef]
- Antontsev, S.; Shmarev, S. Blow-up of solutions to parabolic equations with nonstandard growth conditions. J. Comput. Appl. Math. 2010, 234, 2633–2645. [Google Scholar] [CrossRef] [Green Version]
- Antontsev, S.; Ferreira, J.; Piskin, E. Existence and blow up of solutions for a strongly damped Petrovsky equation with variable-exponent nonlinearities. Electron. J. Differ. Equ. 2021, 2021, 1–18. [Google Scholar]
- Abita, R. Existence and asymptotic behavior of solutions for degenerate nonlinear Kirchhoff strings with variable-exponent nonlinearities. Acta Math. Vietnam. 2021, 46, 613–643. [Google Scholar] [CrossRef]
- Rahmoune, A.; Benabderrahmane, B. On the viscoelastic equation with Balakrishnan–Taylor damping and nonlinear boundary/interior sources with variable-exponent nonlinearities. Stud. Univ. Babes-Bolyai Math. 2020, 65, 599–639. [Google Scholar] [CrossRef]
- Al-Gharabli, M.M.; Al-Mahdi, A.M.; Kafini, M. Global existence and new decay results of a viscoelastic wave equation with variable exponent and logarithmic nonlinearities. AIMS Math. 2021, 6, 10105–10129. [Google Scholar] [CrossRef]
- Antontsev, S.; Shmarev, S. Evolution PDEs with Nonstandard Growth Conditions; Atlantis Press: Paris, France, 2015. [Google Scholar]
- Diening, L.; Harjulehto, P.; Hästö, P.; Ruzicka, M. Lebesgue and Sobolev Spaces with Variable Exponents; Springer: New York, NY, USA, 2011. [Google Scholar]
- Radulescu, V.D.; Repovs, D.D. Partial Differential Equations with Variable Exponents: Variational Methods and Qualitative Analysis; CRC Press: Boca Raton, FL, USA, 2015; Volume 9. [Google Scholar]
- Mustafa, M.I. Optimal decay rates for the viscoelastic wave equation. Math. Methods Appl. Sci. 2018, 41, 192–204. [Google Scholar] [CrossRef]
- Jin, K.-P.; Liang, J.; Xiao, T.-J. Coupled second order evolution equations with fading memory: Optimal energy decay rate. J. Differ. Equ. 2014, 257, 1501–1528. [Google Scholar] [CrossRef]
- Messaoudi, S.A. General decay of solutions of a viscoelastic equation. J. Math. Anal. Appl. 2008, 341, 1457–1467. [Google Scholar] [CrossRef]
- Arnol’d, V.I. Mathematical Methods of Classical Mechanics; Springer Science & Business Media: New York, NY, USA, 2013; Volume 60. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Mahdi, A.M.; Al-Gharabli, M.M.; Noor, M.; Audu, J.D. Stability Results for a Weakly Dissipative Viscoelastic Equation with Variable-Exponent Nonlinearity: Theory and Numerics. Math. Comput. Appl. 2023, 28, 5. https://doi.org/10.3390/mca28010005
Al-Mahdi AM, Al-Gharabli MM, Noor M, Audu JD. Stability Results for a Weakly Dissipative Viscoelastic Equation with Variable-Exponent Nonlinearity: Theory and Numerics. Mathematical and Computational Applications. 2023; 28(1):5. https://doi.org/10.3390/mca28010005
Chicago/Turabian StyleAl-Mahdi, Adel M., Mohammad M. Al-Gharabli, Maher Noor, and Johnson D. Audu. 2023. "Stability Results for a Weakly Dissipative Viscoelastic Equation with Variable-Exponent Nonlinearity: Theory and Numerics" Mathematical and Computational Applications 28, no. 1: 5. https://doi.org/10.3390/mca28010005
APA StyleAl-Mahdi, A. M., Al-Gharabli, M. M., Noor, M., & Audu, J. D. (2023). Stability Results for a Weakly Dissipative Viscoelastic Equation with Variable-Exponent Nonlinearity: Theory and Numerics. Mathematical and Computational Applications, 28(1), 5. https://doi.org/10.3390/mca28010005