Simultaneous and Multiplexed Measurement of Curvature and Strain Based on Optical Fiber Fabry-Perot Interferometric Sensors



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
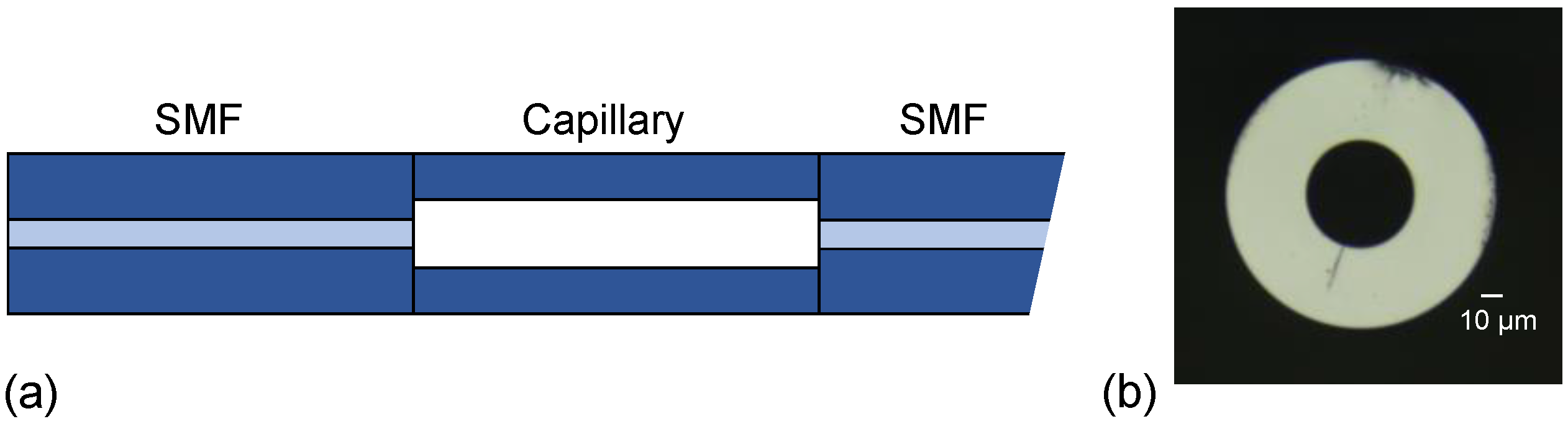
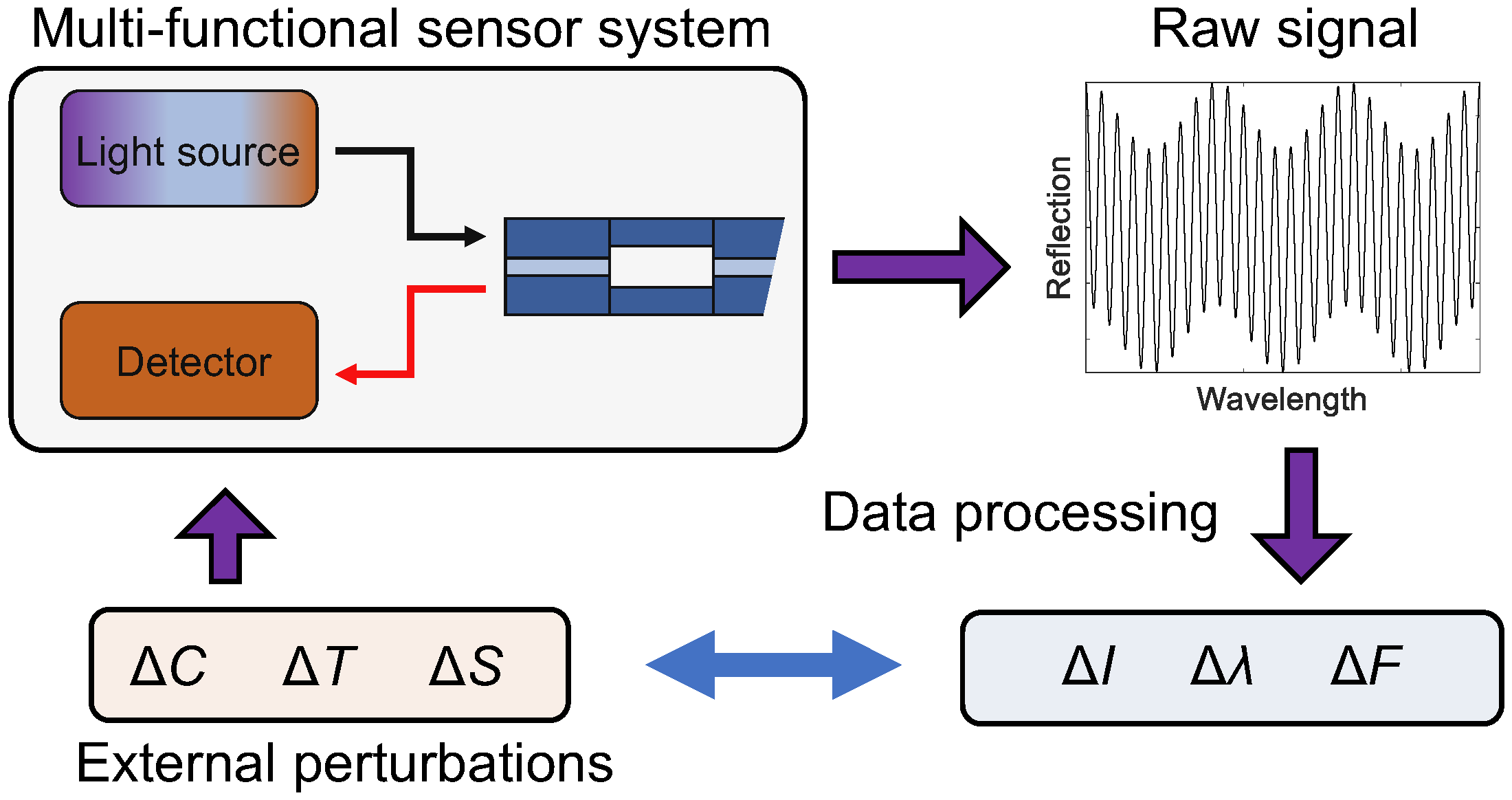
2.1. Sensing Structure and Principle
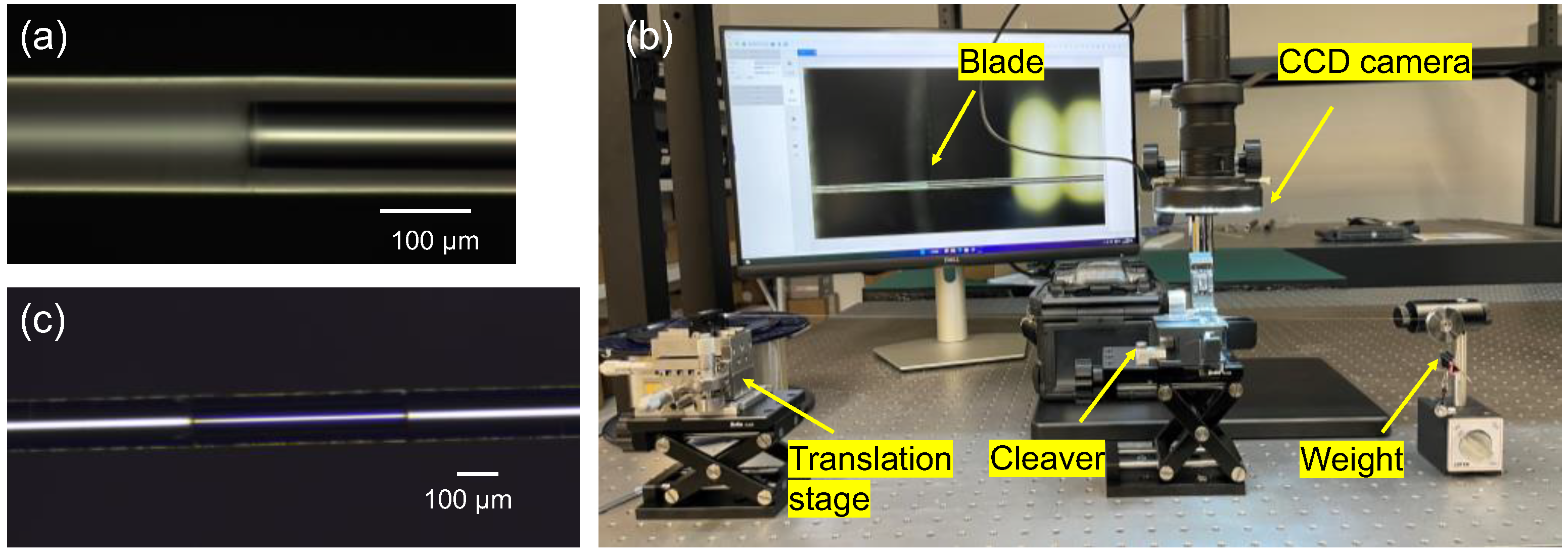
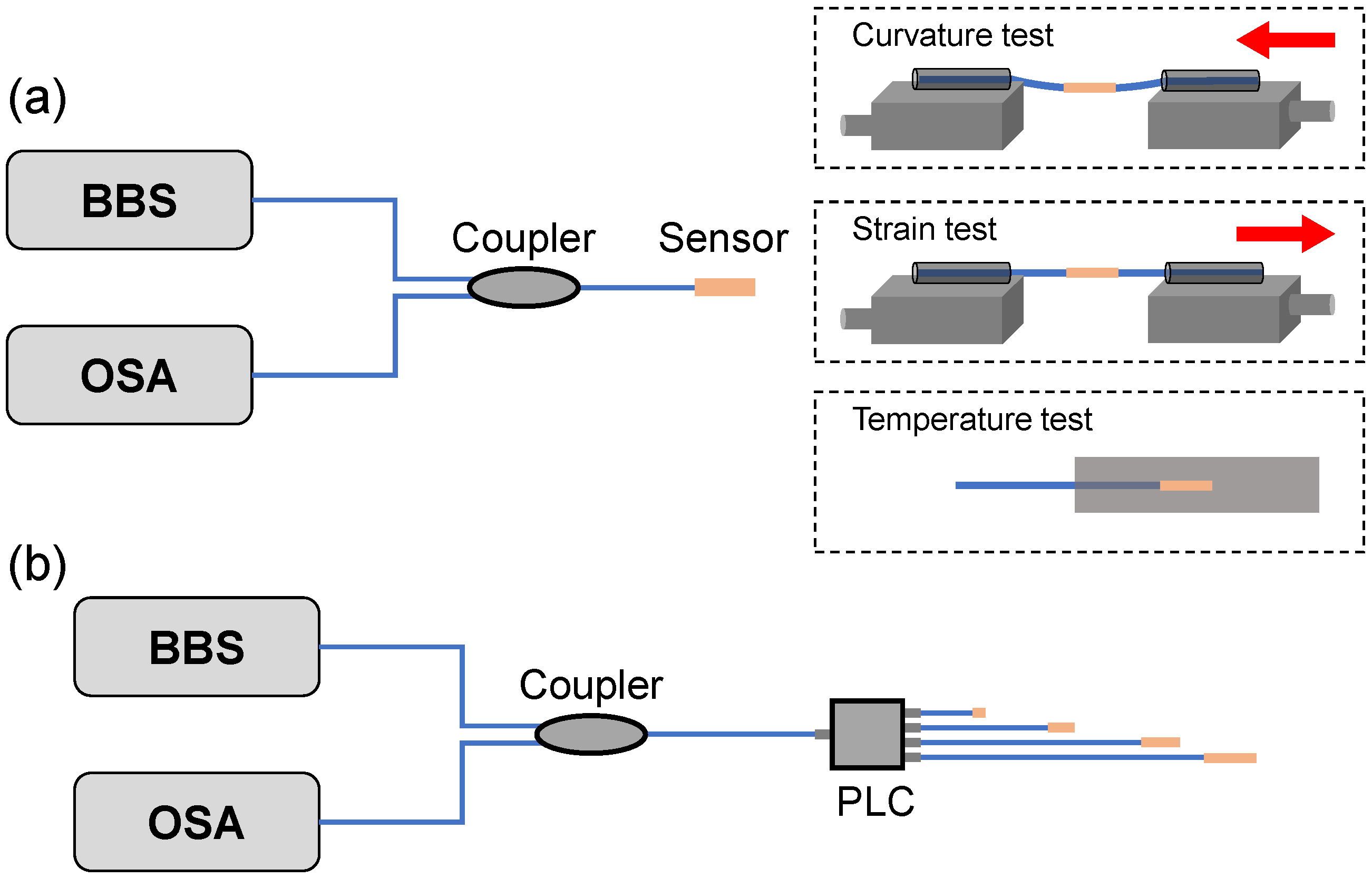
2.2. Experimental Setup
3. Results and Discussion
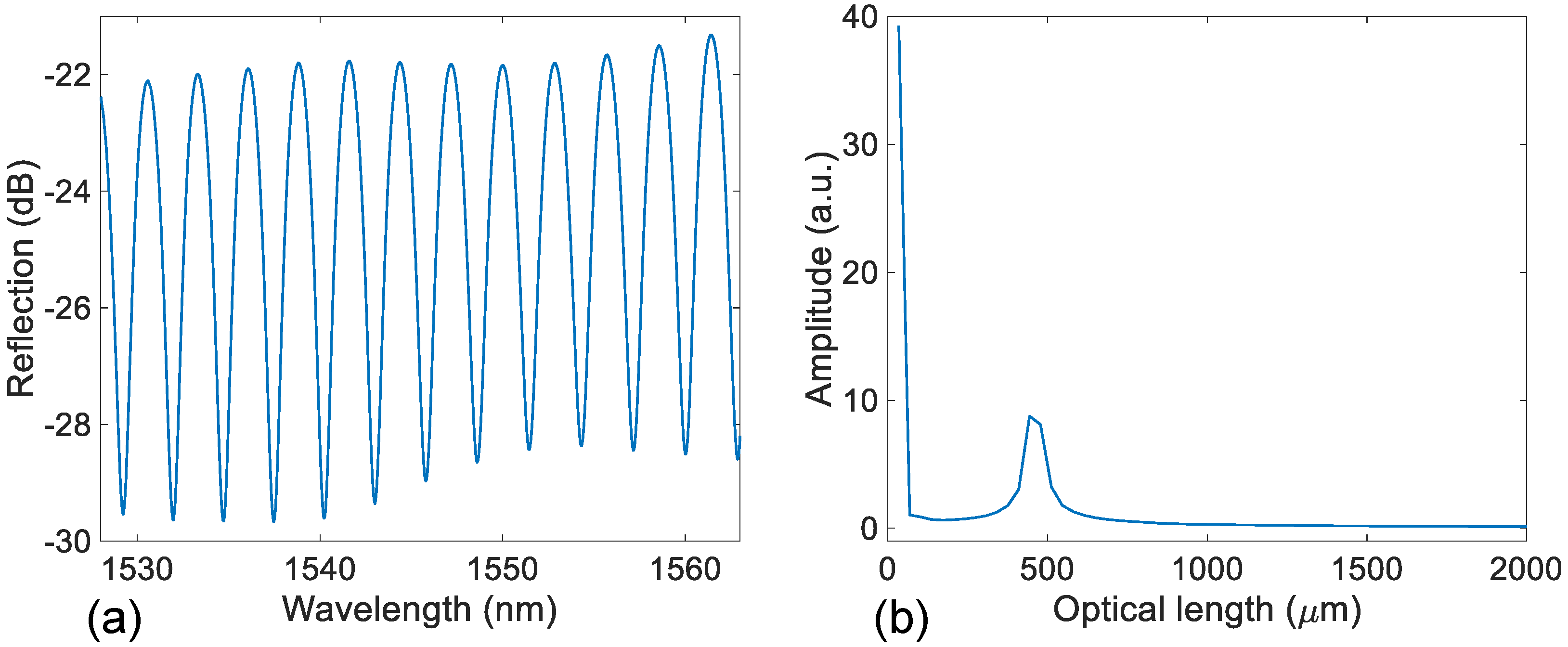
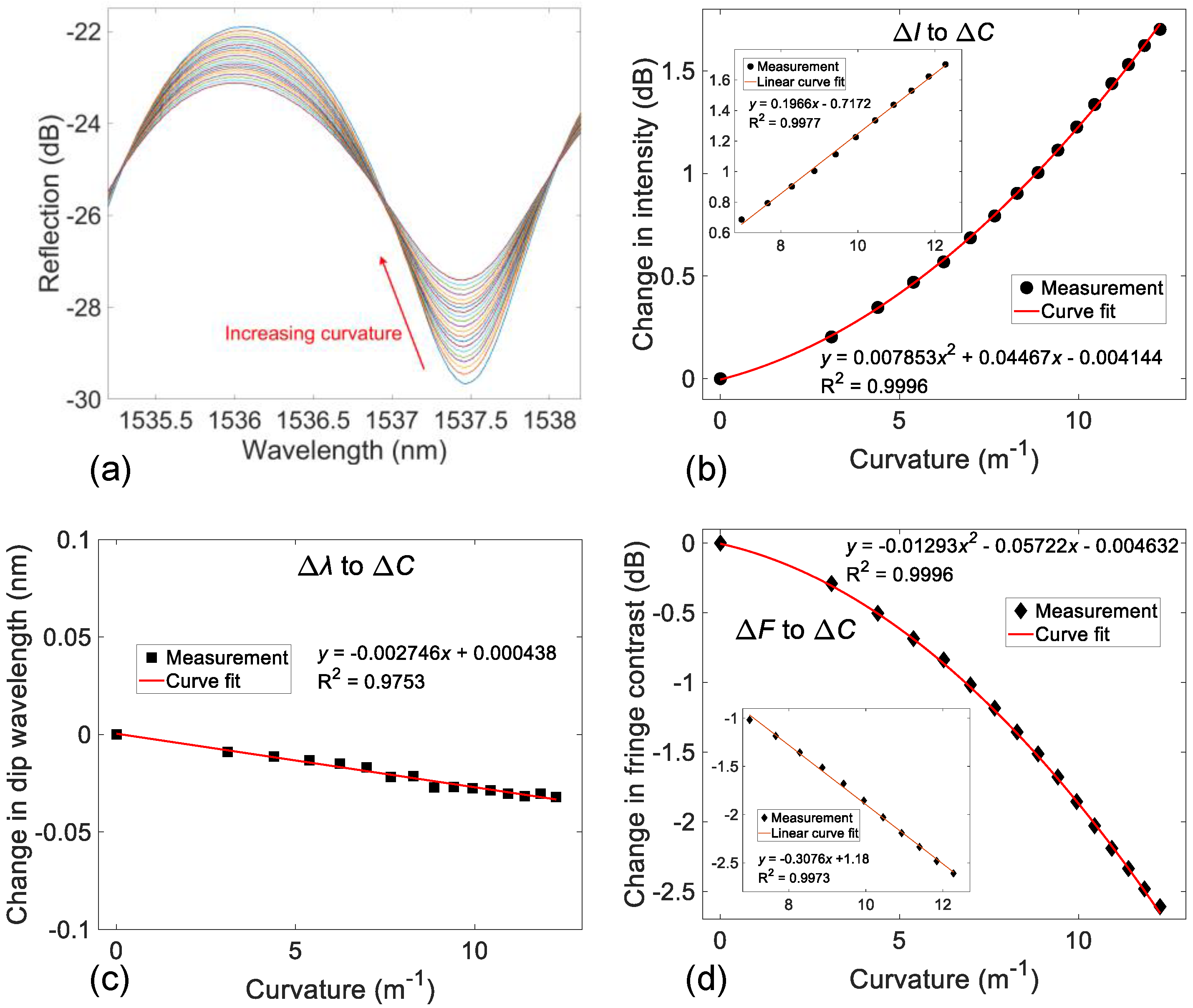
3.1. Single FPI Device for Curvature Sensing
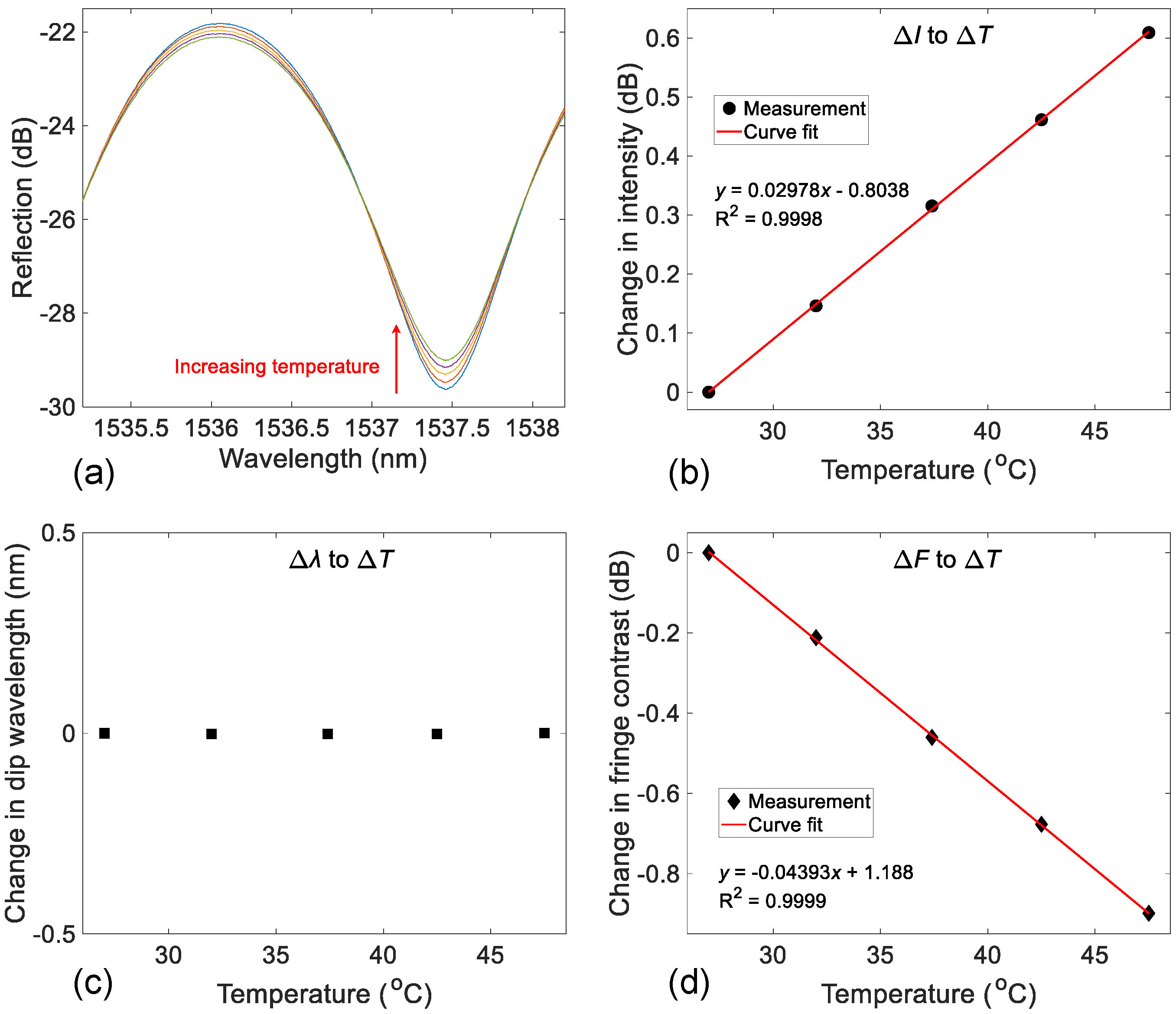
3.2. Single FPI Device for Temperature Sensing
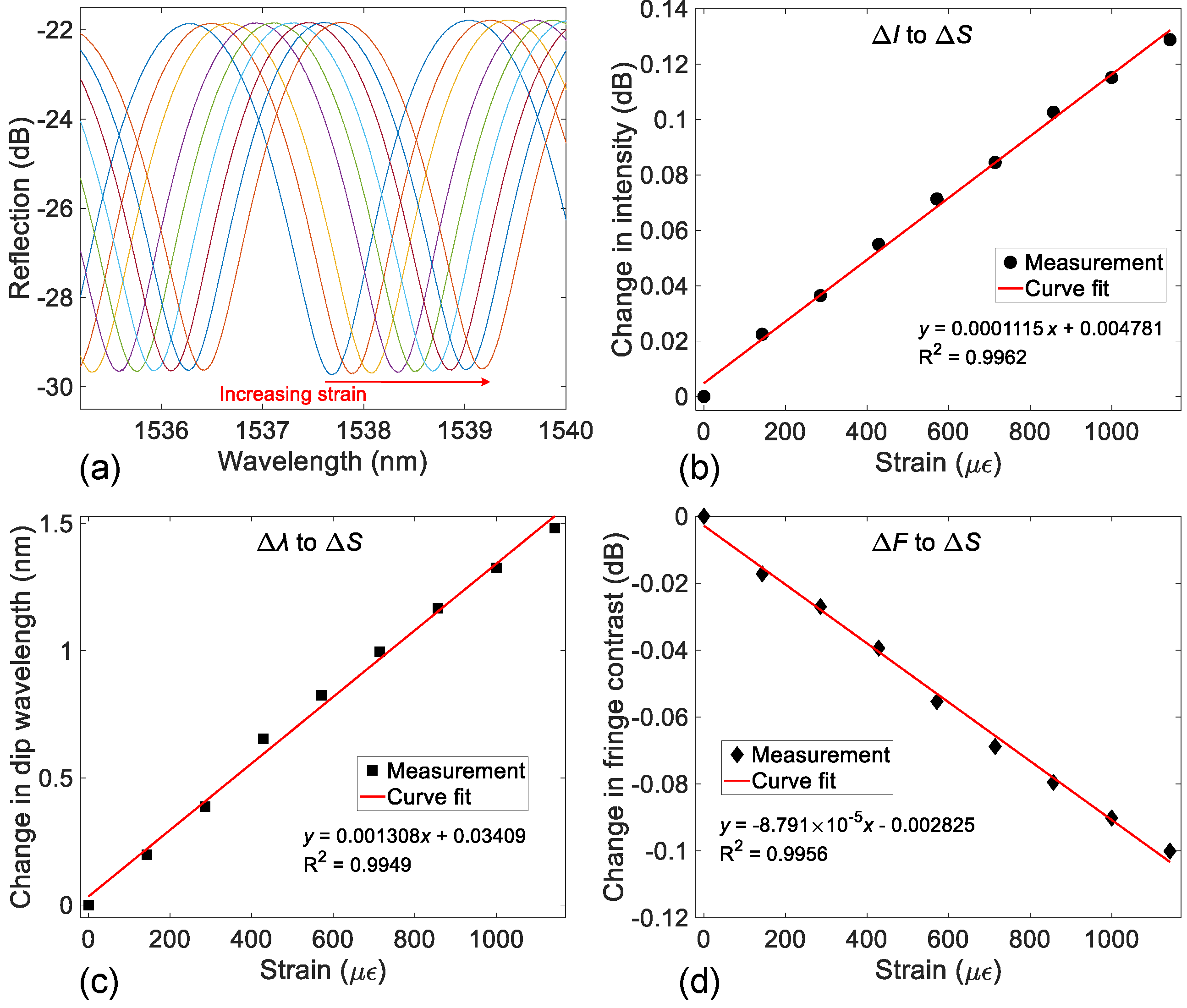
3.3. Single FPI Device for Strain Sensing
3.4. Multiplexed FPI Sensors for Curvature and Strain Sensing
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Q.; Liu, Y. Review of optical fiber bending/curvature sensor. Measurement 2018, 130, 161–176. [Google Scholar] [CrossRef]
- Di, H.; Xin, Y.; Jian, J. Review of optical fiber sensors for deformation measurement. Optik 2018, 168, 703–713. [Google Scholar] [CrossRef]
- Amanzadeh, M.; Aminossadati, S.M.; Kizil, M.S.; Rakić, A.D. Recent developments in fibre optic shape sensing. Measurement 2018, 128, 119–137. [Google Scholar] [CrossRef]
- Parent, F.; Loranger, S.; Mandal, K.K.; Iezzi, V.L.; Lapointe, J.; Boisvert, J.-S.; Baiad, M.D.; Kadoury, S.; Kashyap, R. Enhancement of accuracy in shape sensing of surgical needles using optical frequency domain reflectometry in optical fibers. Biomed. Opt. Express 2017, 8, 2210–2221. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Asundi, A. Structural health monitoring using a fiber optic polarimetric sensor and a fiber optic curvature sensor-static and dynamic test. Smart Mater. Struct. 2001, 10, 181. [Google Scholar] [CrossRef]
- Lu, P.; Lalam, N.; Badar, M.; Liu, B.; Chorpening, B.T.; Buric, M.P.; Ohodnicki, P.R. Distributed optical fiber sensing: Review and perspective. Appl. Phys. Rev. 2019, 6, 041302. [Google Scholar] [CrossRef]
- Joe, H.-E.; Yun, H.; Jo, S.-H.; Jun, M.B.; Min, B.-K. A review on optical fiber sensors for environmental monitoring. Int. J. Precis. Eng. Manuf.-Green Technol. 2018, 5, 173–191. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, W.-G.; Chen, L.; Zhang, Y.-X.; Geng, P.-C.; Wang, B.; Yan, T.-Y.; Li, Y.-P.; Hu, W. Bending vector sensor based on the multimode-2-core-multimode fiber structure. IEEE Photonics Technol. Lett. 2016, 28, 2066–2069. [Google Scholar] [CrossRef]
- Wu, Y.; Pei, L.; Jin, W.; Jiang, Y.; Yang, Y.; Shen, Y.; Jian, S. Highly sensitive curvature sensor based on asymmetrical twin core fiber and multimode fiber. Opt. Laser Technol. 2017, 92, 74–79. [Google Scholar] [CrossRef]
- Zhao, Y.; Cai, L.; Li, X.-G. Temperature-insensitive optical fiber curvature sensor based on SMF-MMF-TCSMF-MMF-SMF structure. IEEE Trans. Instrum. Meas. 2016, 66, 141–147. [Google Scholar] [CrossRef]
- Fernandes, C.S.; Giraldi, M.T.M.R.; de Sousa, M.J.; Costa, J.C.; Gouveia, C.; Jorge, P.; Franco, M.A. Curvature and vibration sensing based on core diameter mismatch structures. IEEE Trans. Instrum. Meas. 2016, 65, 2120–2128. [Google Scholar] [CrossRef]
- Villatoro, J.; Van Newkirk, A.; Antonio-Lopez, E.; Zubia, J.; Schülzgen, A.; Amezcua-Correa, R. Ultrasensitive vector bending sensor based on multicore optical fiber. Opt. Lett. 2016, 41, 832–835. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Ning, T.; Zhang, C.; Li, J.; Zhang, C.; Wen, X.; Lin, H.; Pei, L. All-fiber multipath Mach Zehnder interferometer based on a four-core fiber for sensing applications. Sens. Actuators A Phys. 2016, 248, 148–154. [Google Scholar] [CrossRef]
- Ou, Z.; Yu, Y.; Yan, P.; Wang, J.; Huang, Q.; Chen, X.; Du, C.; Wei, H. Ambient refractive index-independent bending vector sensor based on seven-core photonic crystal fiber using lateral offset splicing. Opt. Express 2013, 21, 23812–23821. [Google Scholar] [CrossRef]
- Salceda-Delgado, G.; Van Newkirk, A.; Antonio-Lopez, J.; Martinez-Rios, A.; Schülzgen, A.; Correa, R.A. Compact fiber-optic curvature sensor based on super-mode interference in a seven-core fiber. Opt. Lett. 2015, 40, 1468–1471. [Google Scholar] [CrossRef]
- Zhou, R.; Qiao, X.; Wang, R.; Chen, F.; Ma, W. An optical fiber sensor based on lateral-offset spliced seven-core fiber for bending and stretching strain measurement. IEEE Sens. J. 2020, 20, 5915–5920. [Google Scholar] [CrossRef]
- Fu, H.; Zhao, N.; Shao, M.; Li, H.; Gao, H.; Liu, Q.; Yong, Z.; Liu, Y.; Qiao, X. High-sensitivity Mach–Zehnder interferometric curvature fiber sensor based on thin-core fiber. IEEE Sens. J. 2014, 15, 520–525. [Google Scholar]
- Gong, H.; Yang, X.; Ni, K.; Zhao, C.-L.; Dong, X. An optical fiber curvature sensor based on two peanut-shape structures modal interferometer. IEEE Photonics Technol. Lett. 2013, 26, 22–24. [Google Scholar] [CrossRef]
- Gong, H.; Song, H.; Zhang, S.; Jin, Y.; Dong, X. Curvature sensor based on hollow-core photonic crystal fiber Sagnac interferometer. IEEE Sens. J. 2013, 14, 777–780. [Google Scholar] [CrossRef]
- Ni, K.; Li, T.; Hu, L.; Qian, W.; Zhang, Q.; Jin, S. Temperature-independent curvature sensor based on tapered photonic crystal fiber interferometer. Opt. Commun. 2012, 285, 5148–5150. [Google Scholar] [CrossRef]
- Marrujo-García, S.; Hernández-Romano, I.; Torres-Cisneros, M.; May-Arrioja, D.A.; Minkovich, V.P.; Monzón-Hernández, D. Temperature-independent curvature sensor based on in-fiber Mach–Zehnder interferometer using hollow-core fiber. J. Light. Technol. 2020, 38, 4166–4173. [Google Scholar] [CrossRef]
- Zhao, Y.; Cai, L.; Li, X.-G. In-fiber modal interferometer for simultaneous measurement of curvature and temperature based on hollow core fiber. Opt. Laser Technol. 2017, 92, 138–141. [Google Scholar] [CrossRef]
- Herrera-Piad, L.A.; Hernández-Romano, I.; May-Arrioja, D.A.; Minkovich, V.P.; Torres-Cisneros, M. Sensitivity enhancement of curvature fiber sensor based on polymer-coated capillary hollow-core fiber. Sensors 2020, 20, 3763. [Google Scholar] [CrossRef] [PubMed]
- Cheng, H.; Wu, S.; Wang, Q.; Wang, S.; Lu, P. In-line hybrid fiber sensor for curvature and temperature measurement. IEEE Photonics J. 2019, 11, 6803311. [Google Scholar] [CrossRef]
- Zhao, Y.; Chen, M.-q.; Xia, F.; Cai, L.; Li, X.-G. Small curvature sensor based on butterfly-shaped Mach–Zehnder interferometer. IEEE Trans. Electron Devices 2017, 64, 4644–4649. [Google Scholar] [CrossRef]
- Gong, Y.; Zhao, T.; Rao, Y.-J.; Wu, Y. All-fiber curvature sensor based on multimode interference. IEEE Photonics Technol. Lett. 2011, 23, 679–681. [Google Scholar] [CrossRef]
- Silva, S.; Frazão, O.; Viegas, J.; Ferreira, L.; Araújo, F.; Malcata, F.X.; Santos, J. Temperature and strain-independent curvature sensor based on a singlemode/multimode fiber optic structure. Meas. Sci. Technol. 2011, 22, 085201. [Google Scholar] [CrossRef]
- Niu, Y.; Chen, Q.; Zhao, C.; Wang, D. Highly sensitive optical fiber bending sensor based on hollow core fiber and single mode fiber. Optik 2021, 228, 166209. [Google Scholar] [CrossRef]
- Zhu, C.; Gerald, R.E.; Huang, J. A dual-parameter internally calibrated Fabry-Perot microcavity sensor. IEEE Sens. J. 2019, 20, 2511–2517. [Google Scholar] [CrossRef]
- Gao, H.; Jiang, Y.; Zhang, L.; Cui, Y.; Jiang, Y.; Jia, J.; Jiang, L. Antiresonant mechanism based self-temperature-calibrated fiber optic Fabry–Perot gas pressure sensors. Opt. Express 2019, 27, 22181–22189. [Google Scholar] [CrossRef]
- Islam, M.; Ali, M.M.; Lai, M.-H.; Lim, K.-S.; Ahmad, H. Chronology of Fabry-Perot interferometer fiber-optic sensors and their applications: A review. Sensors 2014, 14, 7451–7488. [Google Scholar] [CrossRef]
- Bitarafan, M.H.; DeCorby, R.G. On-chip high-finesse Fabry-Perot microcavities for optical sensing and quantum information. Sensors 2017, 17, 1748. [Google Scholar] [CrossRef]
- Pfeifer, H.; Ratschbacher, L.; Gallego, J.; Saavedra, C.; Faßbender, A.; von Haaren, A.; Alt, W.; Hofferberth, S.; Köhl, M.; Linden, S. Achievements and perspectives of optical fiber Fabry–Perot cavities. Appl. Phys. B 2022, 128, 29. [Google Scholar] [CrossRef]
- Ebermann, M.; Neumann, N.; Hiller, K.; Seifert, M.; Meinig, M.; Kurth, S. Tunable MEMS Fabry-Pérot Filters for Infrared Microspectrometers: A Review; MOEMS and Miniaturized Systems XV, 2016; SPIE: Cergy-Pontoise, France, 2016; pp. 64–83. [Google Scholar]
- Rao, Y.-J. Recent progress in fiber-optic extrinsic Fabry–Perot interferometric sensors. Opt. Fiber Technol. 2006, 12, 227–237. [Google Scholar] [CrossRef]
- Yu, Q.; Zhou, X. Pressure sensor based on the fiber-optic extrinsic Fabry-Perot interferometer. Photonic Sens. 2011, 1, 72–83. [Google Scholar] [CrossRef]
- Zhu, C.; Zhuang, Y.; Zhang, B.; Muhammad, R.; Wang, P.P.; Huang, J. A miniaturized optical fiber tip high-temperature sensor based on concave-shaped Fabry–Perot cavity. IEEE Photonics Technol. Lett. 2018, 31, 35–38. [Google Scholar] [CrossRef]
- Ouyang, Y.; Guo, H.; Ouyang, X.; Zhao, Y.; Zheng, Z.; Zhou, C.; Zhou, A. An in-fiber dual air-cavity Fabry–Perot interferometer for simultaneous measurement of strain and directional bend. IEEE Sens. J. 2017, 17, 3362–3366. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Avellar, L.M.; Diaz, C.A.; Frizera, A.; Marques, C.; Pontes, M.J. Fabry–Pérot curvature sensor with cavities based on UV-curable resins: Design, analysis, and data integration approach. IEEE Sens. J. 2019, 19, 9798–9805. [Google Scholar] [CrossRef]
- Xu, X.; He, J.; Hou, M.; Liu, S.; Bai, Z.; Wang, Y.; Liao, C.; Ouyang, Z.; Wang, Y. A miniature fiber collimator for highly sensitive bend measurements. J. Light. Technol. 2018, 36, 2827–2833. [Google Scholar] [CrossRef]
- Novais, S.; Silva, S.O.; Frazão, O. Curvature detection in a medical needle using a Fabry-Perot cavity as an intensity sensor. Measurement 2020, 151, 107160. [Google Scholar] [CrossRef]
- Zhang, X.; Pan, H.; Bai, H.; Yan, M.; Wang, J.; Deng, C.; Wang, T. Transition of Fabry-Perot and antiresonant mechanisms via a SMF-capillary-SMF structure. Opt. Lett. 2018, 43, 2268–2271. [Google Scholar] [CrossRef] [PubMed]
- Sun, W.; Zhang, X.; Yu, Y.; Yang, L.; Hou, F.; Yang, Y.; Wang, T. Comparative study on transmission mechanisms in a SMF-capillary-SMF structure. J. Light. Technol. 2020, 38, 4075–4085. [Google Scholar] [CrossRef]
- Zheng, H.-K.; Lv, R.-Q.; Zhao, Y.; Wang, X.-X.; Lin, Z.-T.; Zhou, Y.-F.; Zhao, Q. A novel high accuracy optical path difference compensation method based on phase difference technology. Opt. Lasers Eng. 2021, 137, 106367. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, C.; Zheng, H.; Alsalman, O.; Naku, W.; Ma, L. Simultaneous and Multiplexed Measurement of Curvature and Strain Based on Optical Fiber Fabry-Perot Interferometric Sensors. Photonics 2023, 10, 580. https://doi.org/10.3390/photonics10050580
Zhu C, Zheng H, Alsalman O, Naku W, Ma L. Simultaneous and Multiplexed Measurement of Curvature and Strain Based on Optical Fiber Fabry-Perot Interferometric Sensors. Photonics. 2023; 10(5):580. https://doi.org/10.3390/photonics10050580
Chicago/Turabian StyleZhu, Chen, Hongkun Zheng, Osamah Alsalman, Wassana Naku, and Lingmei Ma. 2023. "Simultaneous and Multiplexed Measurement of Curvature and Strain Based on Optical Fiber Fabry-Perot Interferometric Sensors" Photonics 10, no. 5: 580. https://doi.org/10.3390/photonics10050580
APA StyleZhu, C., Zheng, H., Alsalman, O., Naku, W., & Ma, L. (2023). Simultaneous and Multiplexed Measurement of Curvature and Strain Based on Optical Fiber Fabry-Perot Interferometric Sensors. Photonics, 10(5), 580. https://doi.org/10.3390/photonics10050580