Comparative Analysis on the Deployment of Machine Learning Algorithms in the Distributed Brillouin Optical Time Domain Analysis (BOTDA) Fiber Sensor



Abstract
:1. Introduction
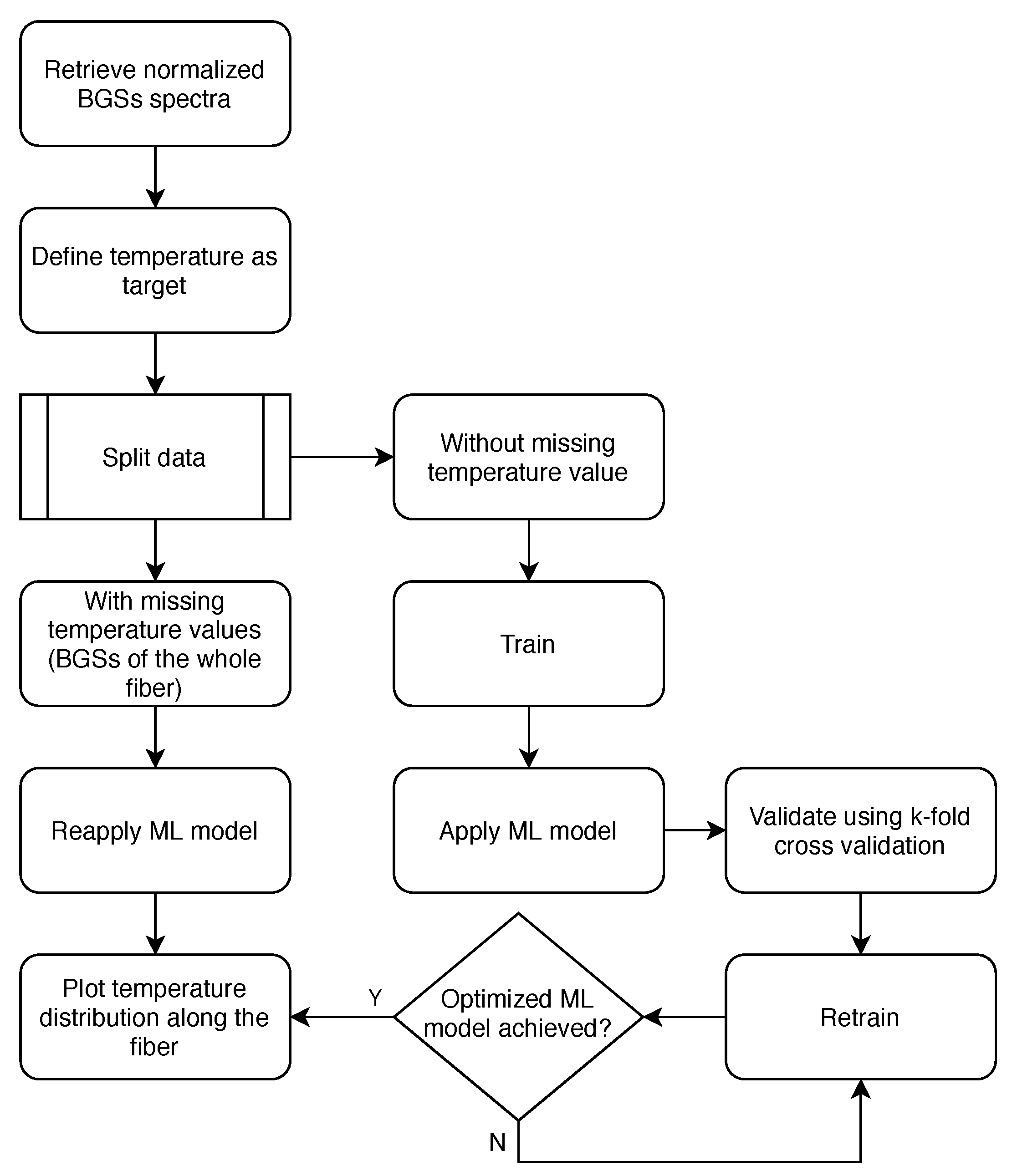
ML-Based Signal Processing
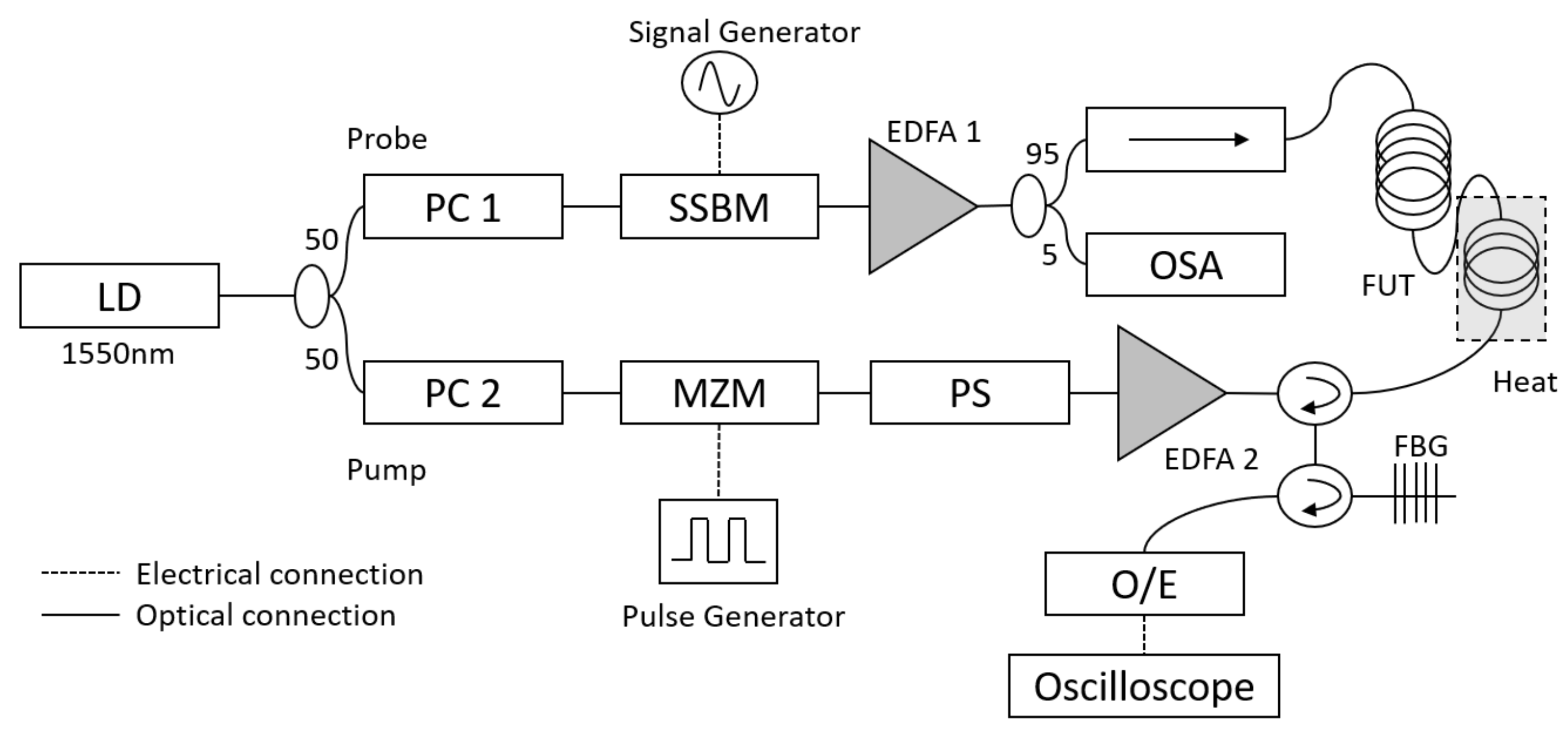
2. Experimental Setup
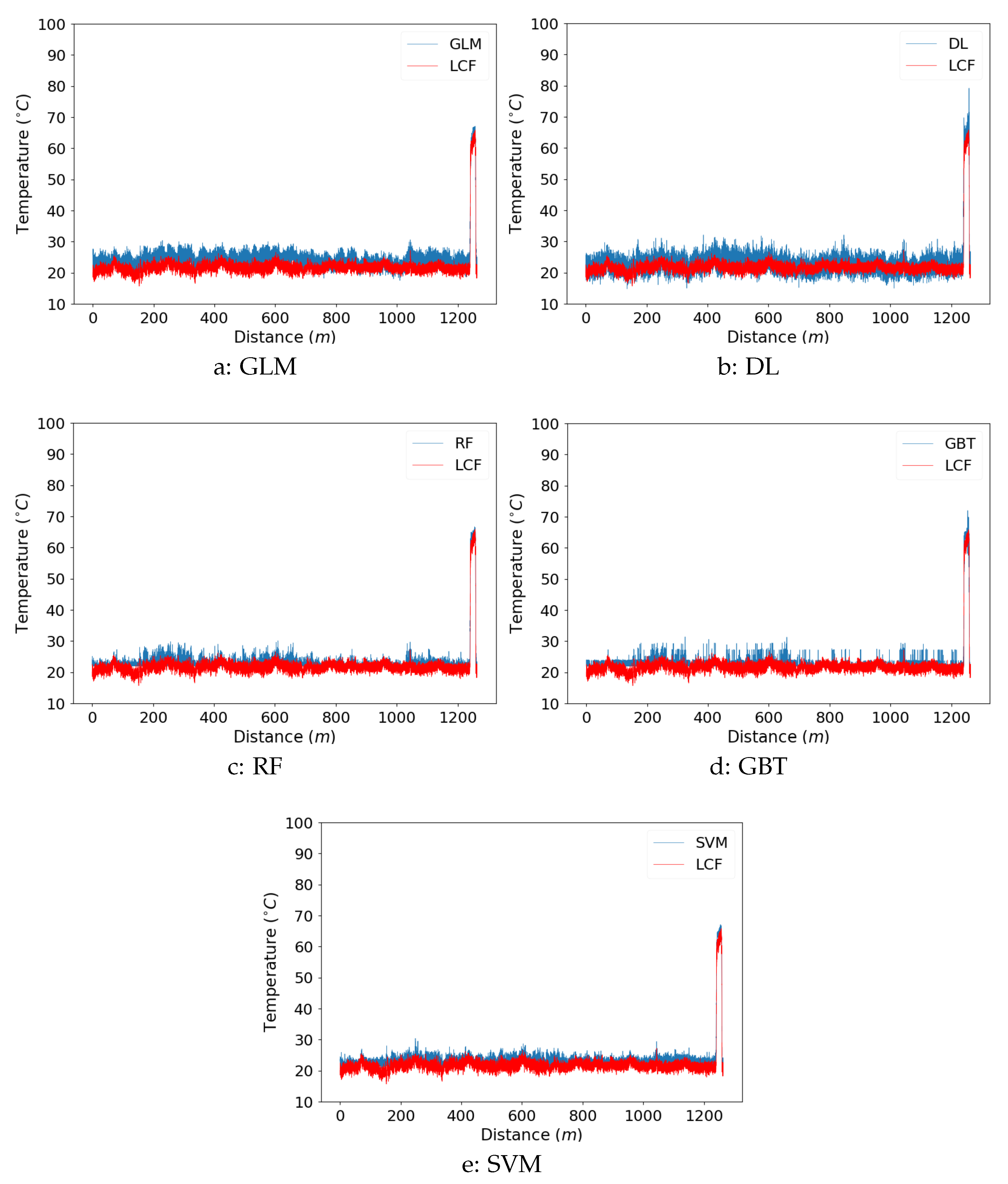
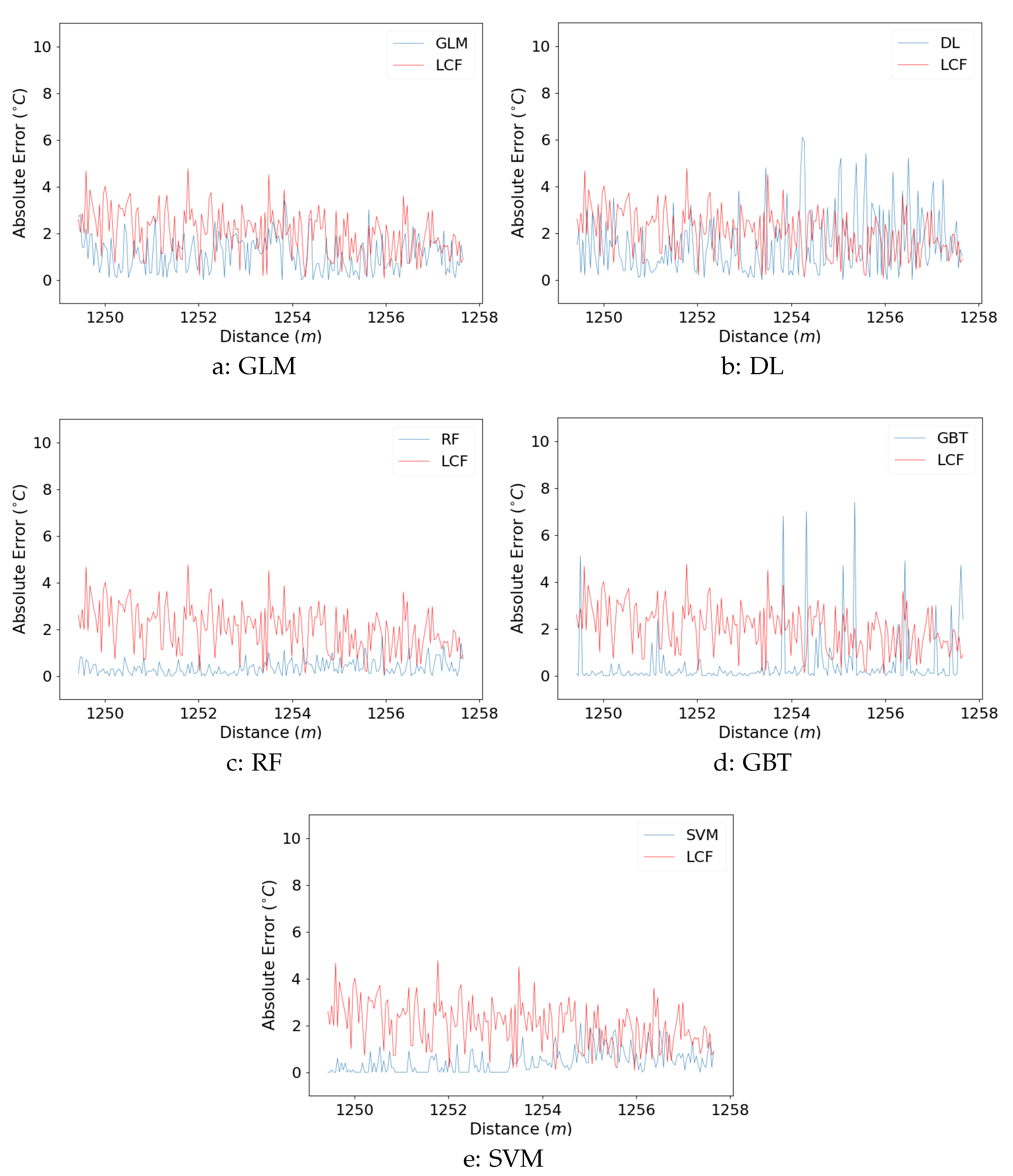
3. Results and Discussions
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, C.; Li, Y. Fitting of Brillouin Spectrum Based on LabVIEW. In Proceedings of the 2009 5th International Conference on Wireless Communications, Networking and Mobile Computing, Beijing, China, 24–26 September 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Galindez-Jamioy, C.A.; López-Higuera, J.M. Brillouin distributed fiber sensors: An overview and applications. J. Sens. 2012, 2012, 204121. [Google Scholar] [CrossRef] [Green Version]
- Bao, X.; Chen, L. Recent Progress in Distributed Fiber Optic Sensors. Sensors 2012, 12, 8601–8639. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Motil, A.; Bergman, A.; Tur, M. [INVITED] State of the art of Brillouin fiber-optic distributed sensing. Opt. Laser Technol. 2016, 78, 81–103. [Google Scholar] [CrossRef]
- Zan, M.S.D.B.; Horiguchi, T. A dual golay complementary pair of sequences for improving the performance of phase-shift pulse BOTDA fiber sensor. J. Lightwave Technol. 2012, 30, 3338–3356. [Google Scholar] [CrossRef]
- Zan, M.S.D.B.; Tsumuraya, T.; Horiguchi, T. The use of Walsh code in modulating the pump light of high spatial resolution phase-shift-pulse Brillouin optical time domain analysis with non-return-to-zero pulses. Meas. Sci. Technol. 2013, 24, 9. [Google Scholar] [CrossRef]
- Horiguchi, T.; Tateda, M. BOTDA-nondestructive measurement of single-mode optical fiber attenuation characteristics using Brillouin interaction: Theory. J. Lightwave Technol. 1989, 7, 1170–1176. [Google Scholar] [CrossRef]
- Horiguchi, T.; Shimizu, K.; Kurashima, T.; Tateda, M.; Koyamada, Y. Development of a distributed sensing technique using Brillouin scattering. J. Lightwave Technol. 1995, 13, 1296–1302. [Google Scholar] [CrossRef]
- Nikles, M.; Thevenaz, L.; Robert, P.A. Measurement of the distributed-Brillouingain spectrum in optical fibers by using a single laser source. In Proceedings of the Conference on Optical Fiber Communication, San Jose, CA, USA, 20 February 1994; OSA: Washington, DC, USA, 1994; p. WF1. [Google Scholar] [CrossRef] [Green Version]
- Kurashima, T.; Horiguchi, T.; Tateda, M. Distributed-temperature sensing using stimulated Brillouin scattering in optical silica fibers. Opt. Lett. 1990, 15, 1038. [Google Scholar] [CrossRef]
- Horiguchi, T.; Kurashima, T.; Koyamada, Y. Measurement of temperature and strain distribution by Brillouin frequency shift in silica optical fibers. In Distributed and Multiplexed Fiber Optic Sensors II; Dakin, J.P., Kersey, A.D., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 1993; Volume 1797, pp. 2–13. [Google Scholar] [CrossRef]
- Ukil, A.; Braendle, H.; Krippner, P. Distributed temperature sensing: Review of technology and applications. IEEE Sens. J. 2012, 12, 885–892. [Google Scholar] [CrossRef] [Green Version]
- Soto, M.A.; Thévenaz, L. Modeling and evaluating the performance of Brillouin distributed optical fiber sensors. Opt. Express 2013, 21, 31347. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, Y.; Li, A. Application of Levenberg-Marquardt algorithm in the Brillouin spectrum fitting. In Proceedings of the Seventh International Symposium on Instrumentation and Control Technology: Optoelectronic Technology and Instruments, Control Theory and Automation, and Space Exploration, Beijing, China, 10–13 October 2008; Fang, J., Wang, Z., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2008; Volume 7129, pp. 443–449. [Google Scholar] [CrossRef]
- Farahani, M.A.; Castillo-Guerra, E.; Colpitts, B.G. Accurate estimation of Brillouin frequency shift in Brillouin optical time domain analysis sensors using cross correlation. Opt. Lett. 2011, 36, 4275. [Google Scholar] [CrossRef]
- Farahani, M.A.; Castillo-Guerra, E.; Colpitts, B.G. A detailed evaluation of the correlation-based method used for estimation of the Brillouin frequency shift in BOTDA sensors. IEEE Sens. J. 2013, 13, 4589–4598. [Google Scholar] [CrossRef]
- Qasem, A.; Abdullah, S.N.H.S.; Sahran, S.; Wook, T.S.M.T.; Hussain, R.I.; Abdullah, N.; Ismail, F. Breast cancer mass localization based on machine learning. In Proceedings of the 2014 IEEE 10th International Colloquium on Signal Processing and Its Applications, Kuala Lumpur, Malaysia, 7–9 March 2014; pp. 31–36. [Google Scholar] [CrossRef]
- Alshalabi, H.; Tiun, S.; Omar, N.; Albared, M. Experiments on the Use of Feature Selection and Machine Learning Methods in Automatic Malay Text Categorization. Procedia Technol. 2013, 11, 748–754. [Google Scholar] [CrossRef] [Green Version]
- Alsaffar, A.; Omar, N. Study on feature selection and machine learning algorithms for Malay sentiment classification. In Proceedings of the 6th International Conference on Information Technology and Multimedia at UNITEN: Cultivating Creativity and Enabling Technology Through the Internet of Things, (ICIMU 2014), Putrajaya, Malaysia, 18–20 November 2015; pp. 270–275. [Google Scholar] [CrossRef]
- Umar, I.K.; Gokcekus, H. Modeling Severity of Road Traffic Accident in Nigeria using Artificial Neural Network. J. Kejuruter. 2019, 31, 221–227. [Google Scholar]
- Sani, M.M.; Ishak, K.A.; Samad, S.A. Evaluation of face recognition system using Support Vector Machine. In Proceedings of the 2009 IEEE Student Conference on Research and Development (SCOReD), Serdang, Malaysia, 16–18 November 2009; pp. 139–141. [Google Scholar] [CrossRef]
- Azad, A.K.; Wang, L.; Guo, N.; Tam, H.Y.; Lu, C. Signal processing using artificial neural network for BOTDA sensor system. Opt. Express 2016, 24, 6769. [Google Scholar] [CrossRef]
- Li, Y.; Wang, J. Optimized neural network for temperature extraction from Brillouin scattering spectra. Opt. Fiber Technol. 2020. [Google Scholar] [CrossRef]
- Ruiz-Lombera, R.; Serrano, J.M.; Lopez-Higuera, J.M. Automatic strain detection in a Brillouin Optical Time Domain sensor using Principal Component Analysis and Artificial Neural Networks. In Proceedings of the SENSORS, 2014 IEEE, Valencia, Spain, 2–5 November 2014; pp. 1539–1542. [Google Scholar] [CrossRef]
- Ruiz-Lombera, R.; Piccolo, A.; Rodriguez-Cobo, L.; Lopez-Higuera, J.M.; Mirapeix, J. Feasibility study of strain and temperature discrimination in a BOTDA system via artificial neural networks. In Proceedings of the 2017 25th Optical Fiber Sensors Conference (OFS), Jeju, Korea, 24–28 April 2017; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Ruiz-Lombera, R.; Fuentes, A.; Rodriguez-Cobo, L.; Lopez-Higuera, J.M.; Mirapeix, J. Simultaneous Temperature and Strain Discrimination in a Conventional BOTDA via Artificial Neural Networks. J. Lightwave Technol. 2018, 36, 2114–2121. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Li, Y.; Liao, J. Temperature extraction for Brillouin optical fiber sensing system based on extreme learning machine. Opt. Commun. 2019, 453, 124418. [Google Scholar] [CrossRef]
- Azad, A.; Wang, L.; Guo, N.; Lu, C.; Tam, H. Temperature sensing in BOTDA system by using artificial neural network. Electron. Lett. 2015, 51, 1578–1580. [Google Scholar] [CrossRef]
- Azad, A.K.; Wang, L.; Guo, N.; Lu, C.; Tam, H.Y. Temperature profile extraction using artificial neural network in BOTDA sensor system. In Proceedings of the 2015 Opto-Electronics and Communications Conference (OECC), Shanghai, China, 28 June–2 July 2015; pp. 1–3. [Google Scholar] [CrossRef]
- Azad, A.K.; Khan, F.N.; Alarashi, W.H.; Guo, N.; Lau, A.P.T.; Lu, C. Temperature extraction in Brillouin optical time-domain analysis sensors using principal component analysis based pattern recognition. Opt. Express 2017, 25, 16534–16549. [Google Scholar] [CrossRef]
- Wang, B.; Wang, L.; Guo, N.; Zhao, Z.; Yu, C.; Lu, C. Deep neural networks assisted BOTDA for simultaneous temperature and strain measurement with enhanced accuracy. Opt. Express 2019, 27, 2530–2543. [Google Scholar] [CrossRef]
- Chang, Y.; Wu, H.; Zhao, C.; Shen, L.; Fu, S.; Tang, M. Distributed Brillouin frequency shift extraction via a convolutional neural network. Photonics Res. 2020, 8, 690–697. [Google Scholar] [CrossRef]
- Wu, H.; Wang, L.; Zhao, Z.; Shu, C.; Lu, C. Support Vector Machine based Differential Pulse-width Pair Brillouin Optical Time Domain Analyzer. IEEE Photonics J. 2018, 10, 6802911. [Google Scholar] [CrossRef]
- Nordin, N.D.; Zan, M.S.D.; Abdullah, F. Generalized linear model for enhancing the temperature measurement performance in Brillouin optical time domain analysis fiber sensor. Opt. Fiber Technol. 2020, 58, 102298. [Google Scholar] [CrossRef]
- Pan, Q.; Huang, X.; Min, R.; Liu, W. Fast frame synchronization design and FPGA implementation in SF-BOTDA. Photonics 2020, 7, 17. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Wang, B.; Jin, C.; Guo, N.; Yu, C.; Lu, C. Brillouin optical time domain analyzer enhanced by artificial/deep neural networks. In Proceedings of the 2017 16th International Conference on Optical Communications and Networks (ICOCN), Wuzhen, China, 7–10 August 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Brink, H.; Richards, J.W.; Fetherolf, M. Real-World Machine Learning; Manning Publications: Shelter Island, NY, USA, 2016. [Google Scholar]
- Hastie, T.J.; Pregibon, D. Generalized Linear Models. In Statistical Models in S; Hastie, T.J., Ed.; Taylor & Francis: New York, NY, USA, 2017; Chapter 6; pp. 193–246. [Google Scholar]
- Mierswa, I.; Wurst, M.; Klinkenberg, R.; Scholz, M.; Euler, T. YALE: Rapid Prototyping for Complex Data Mining Tasks. In Proceedings of the 12th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (KDD’06), Philadelphia, PA, USA, 20–23 August 2006; ACM: New York, NY, USA, 2006; pp. 935–940. [Google Scholar] [CrossRef]
- Newville, M.; Stensitzki, T.; Allen, D.B.; Ingargiola, A. LMFIT: Non-Linear Least-Square Minimization and Curve-Fitting for Python. Available online: https://zenodo.org/record/11813#.X08GJIsRXIV (accessed on 2 September 2020).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
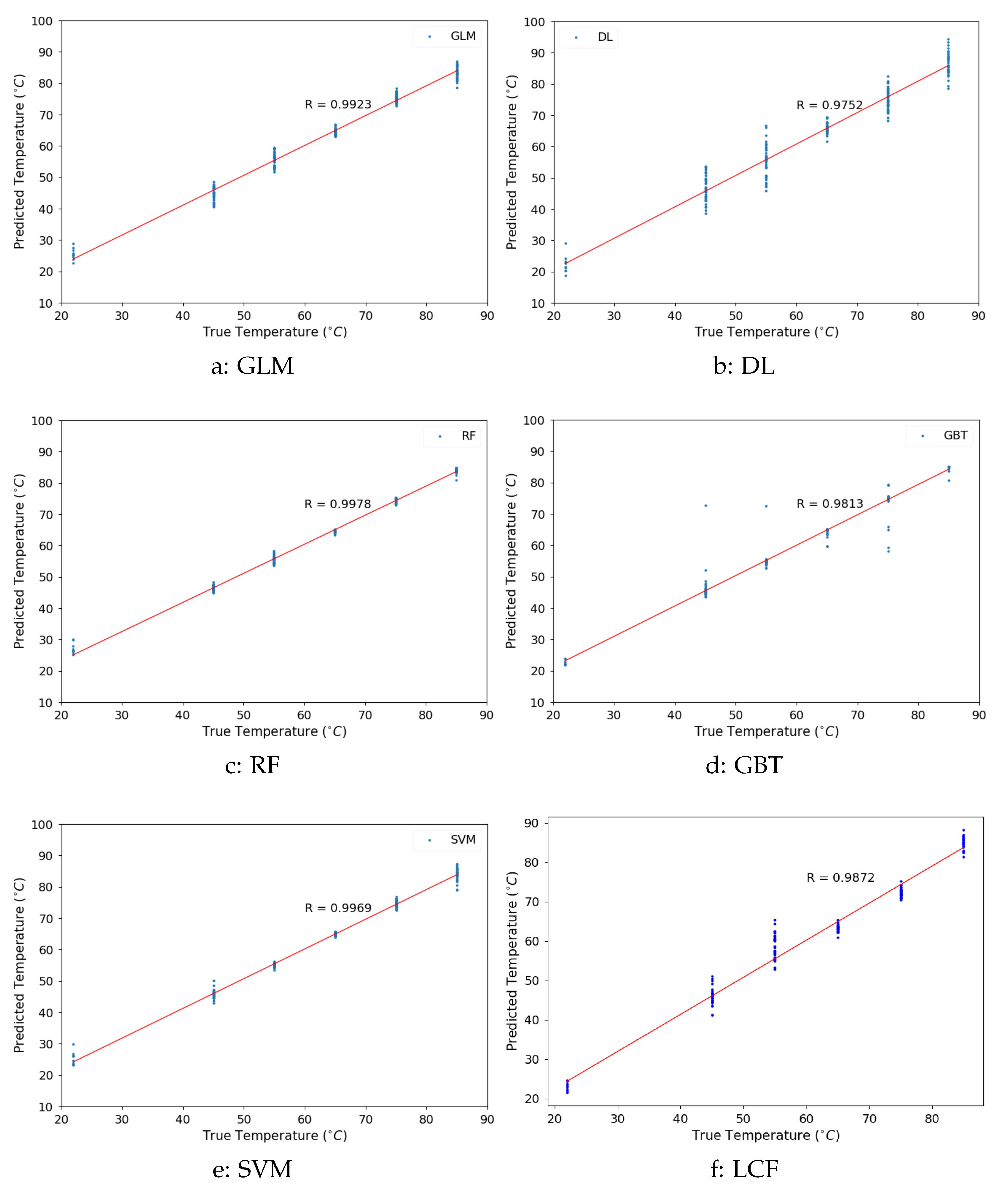
| Parameter | LCF | GLM | DL | RF | GBT | SVM |
|---|---|---|---|---|---|---|
| Measurement Precision () | 1.22 | 1.59 | 1.98 | 1.05 | 1.05 | 1.08 |
| Prediction Accuracy () | 2.25 | 1.32 | 2.03 | 0.48 | 1.25 | 0.69 |
| Time (s) | 655 | 1 | 3 | 31 | 184 | 21 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nordin, N.D.; Zan, M.S.D.; Abdullah, F. Comparative Analysis on the Deployment of Machine Learning Algorithms in the Distributed Brillouin Optical Time Domain Analysis (BOTDA) Fiber Sensor. Photonics 2020, 7, 79. https://doi.org/10.3390/photonics7040079
Nordin ND, Zan MSD, Abdullah F. Comparative Analysis on the Deployment of Machine Learning Algorithms in the Distributed Brillouin Optical Time Domain Analysis (BOTDA) Fiber Sensor. Photonics. 2020; 7(4):79. https://doi.org/10.3390/photonics7040079
Chicago/Turabian StyleNordin, Nur Dalilla, Mohd Saiful Dzulkefly Zan, and Fairuz Abdullah. 2020. "Comparative Analysis on the Deployment of Machine Learning Algorithms in the Distributed Brillouin Optical Time Domain Analysis (BOTDA) Fiber Sensor" Photonics 7, no. 4: 79. https://doi.org/10.3390/photonics7040079
APA StyleNordin, N. D., Zan, M. S. D., & Abdullah, F. (2020). Comparative Analysis on the Deployment of Machine Learning Algorithms in the Distributed Brillouin Optical Time Domain Analysis (BOTDA) Fiber Sensor. Photonics, 7(4), 79. https://doi.org/10.3390/photonics7040079