Generalized Resonance Sensor Based on Fiber Bragg Grating


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Principle
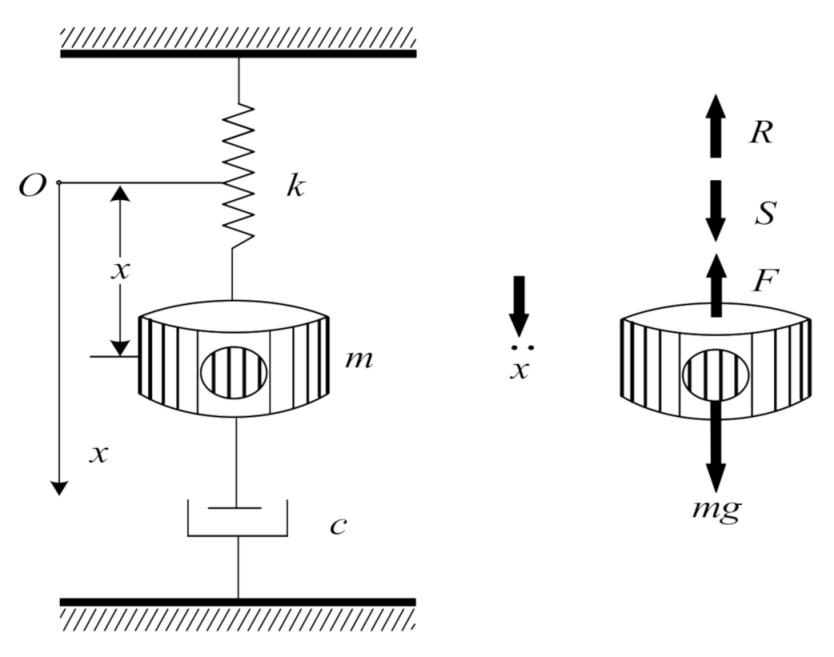
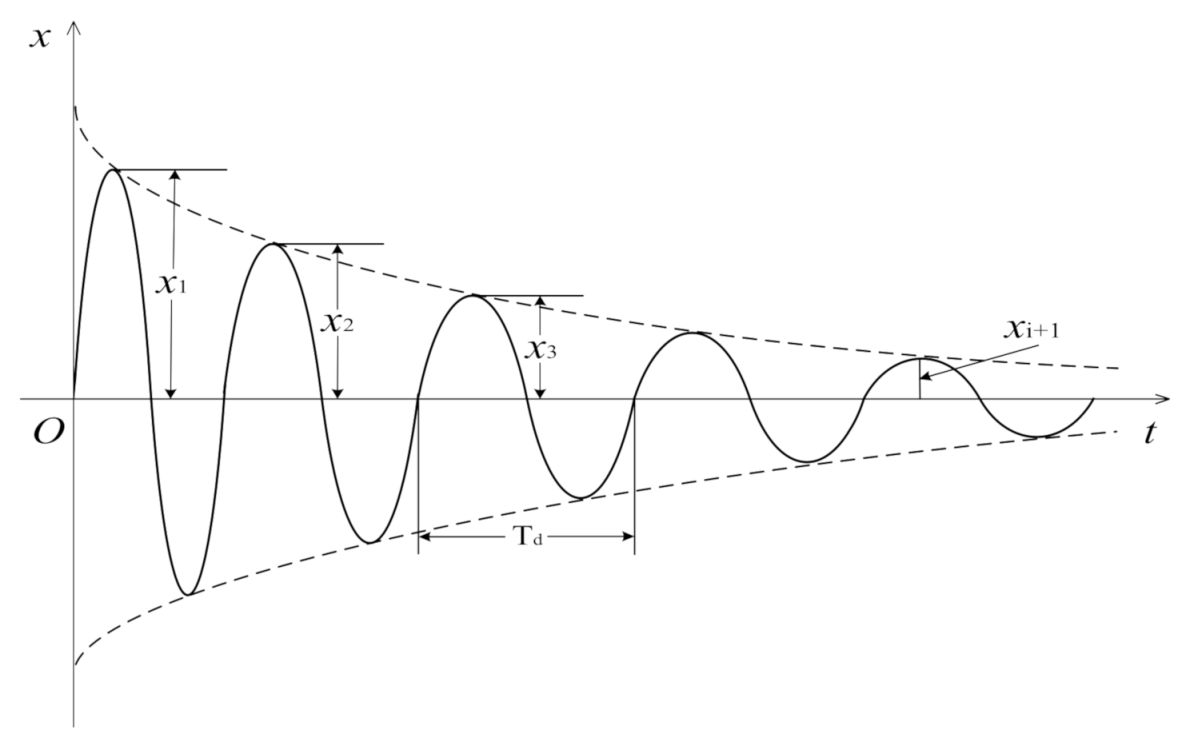
2.1. Principle of Generalized Resonance
2.2. Principle of FBG Strain Sensing
2.3. Monitoring Principle of FBG Generalized Resonance Sensor
3. Design and Material Selection of FBG Generalized Resonance Sensor
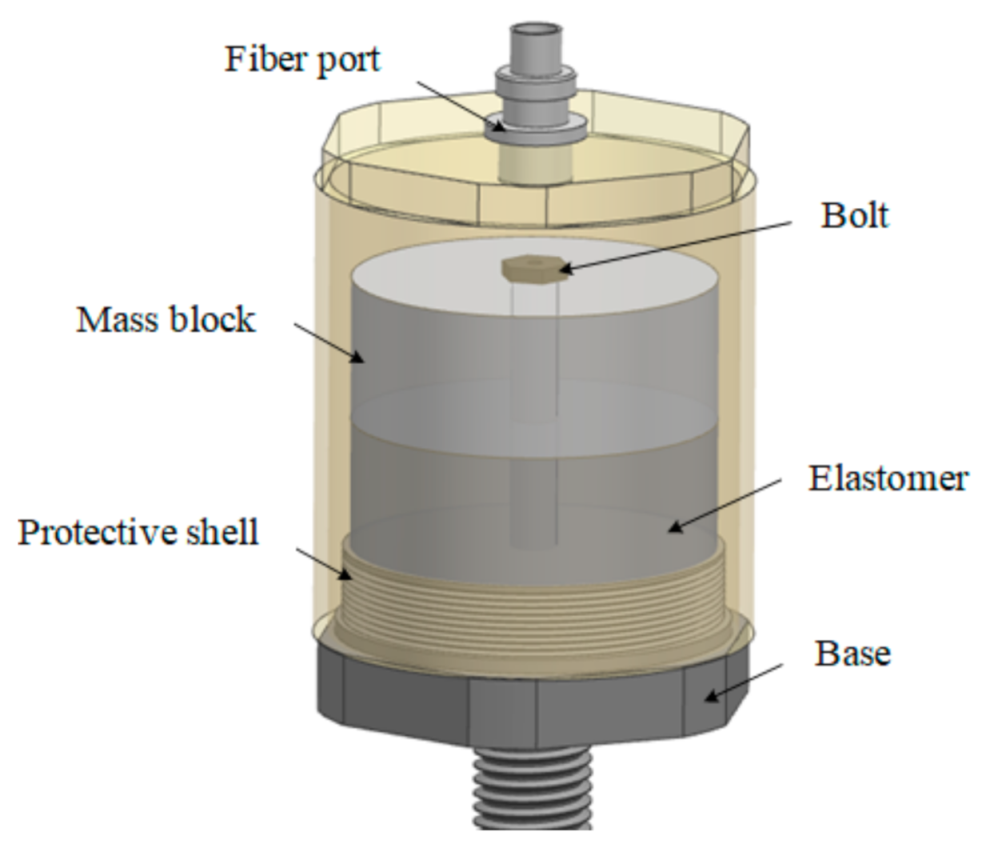
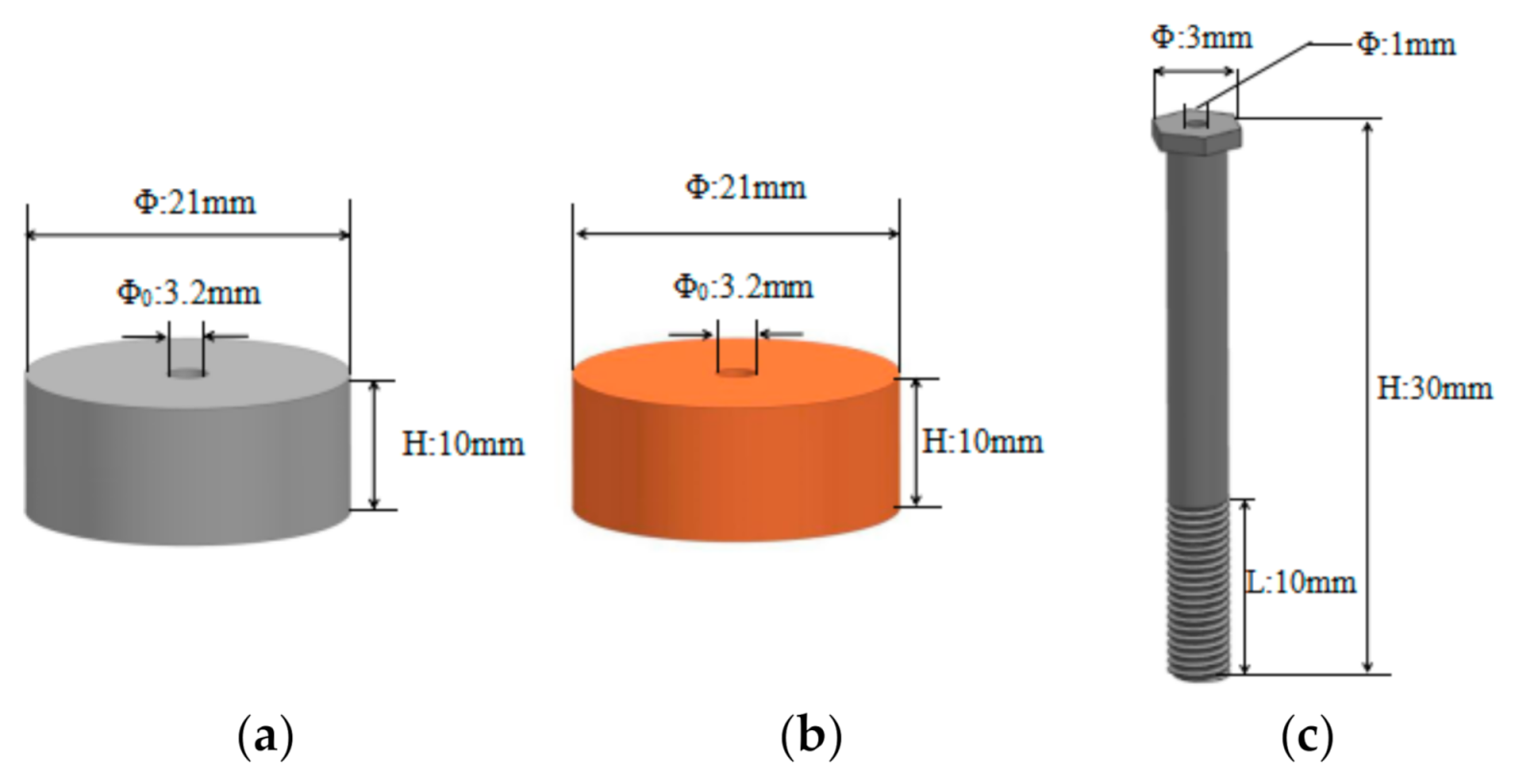
3.1. Sensor Package Design
3.2. Determination of Young’s Modulus of Bolt Metal Material
4. Experiment and Analysis Results
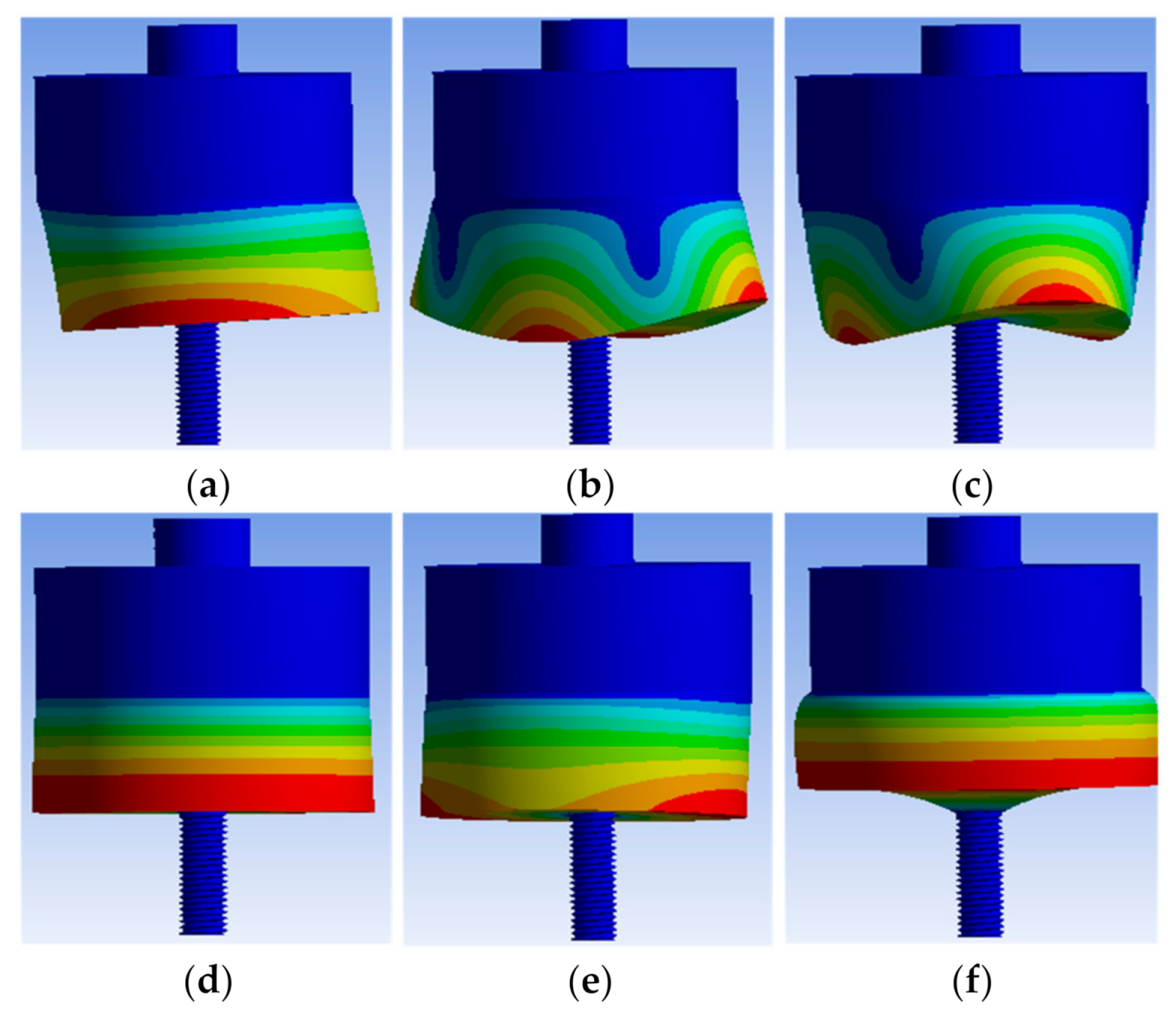
4.1. Natural Frequency Simulation Analysis of FBG Generalized Resonance Sensor
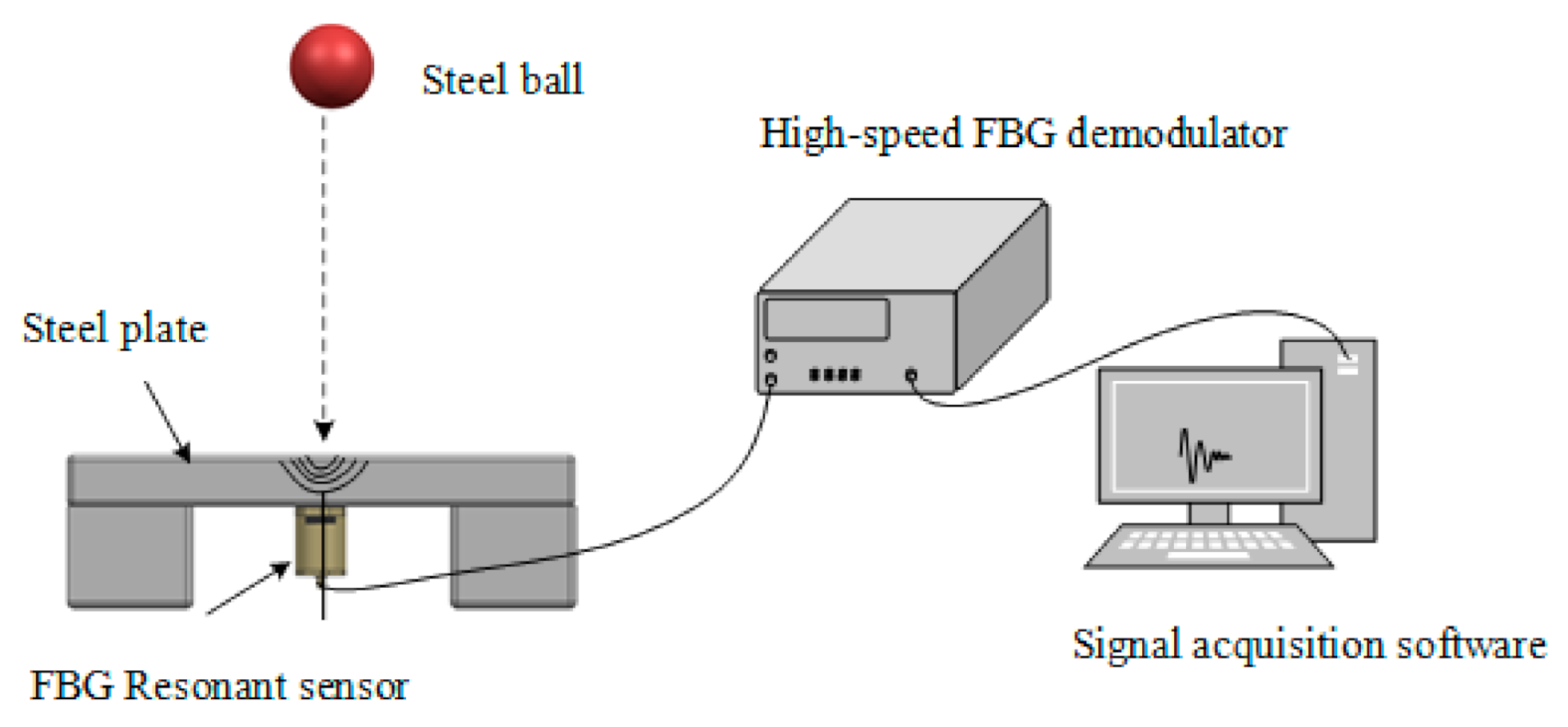
4.2. Design of Natural Frequency Experiment Device for FBG Generalized Resonance Sensor
4.3. Analysis of Natural Frequency Test Data
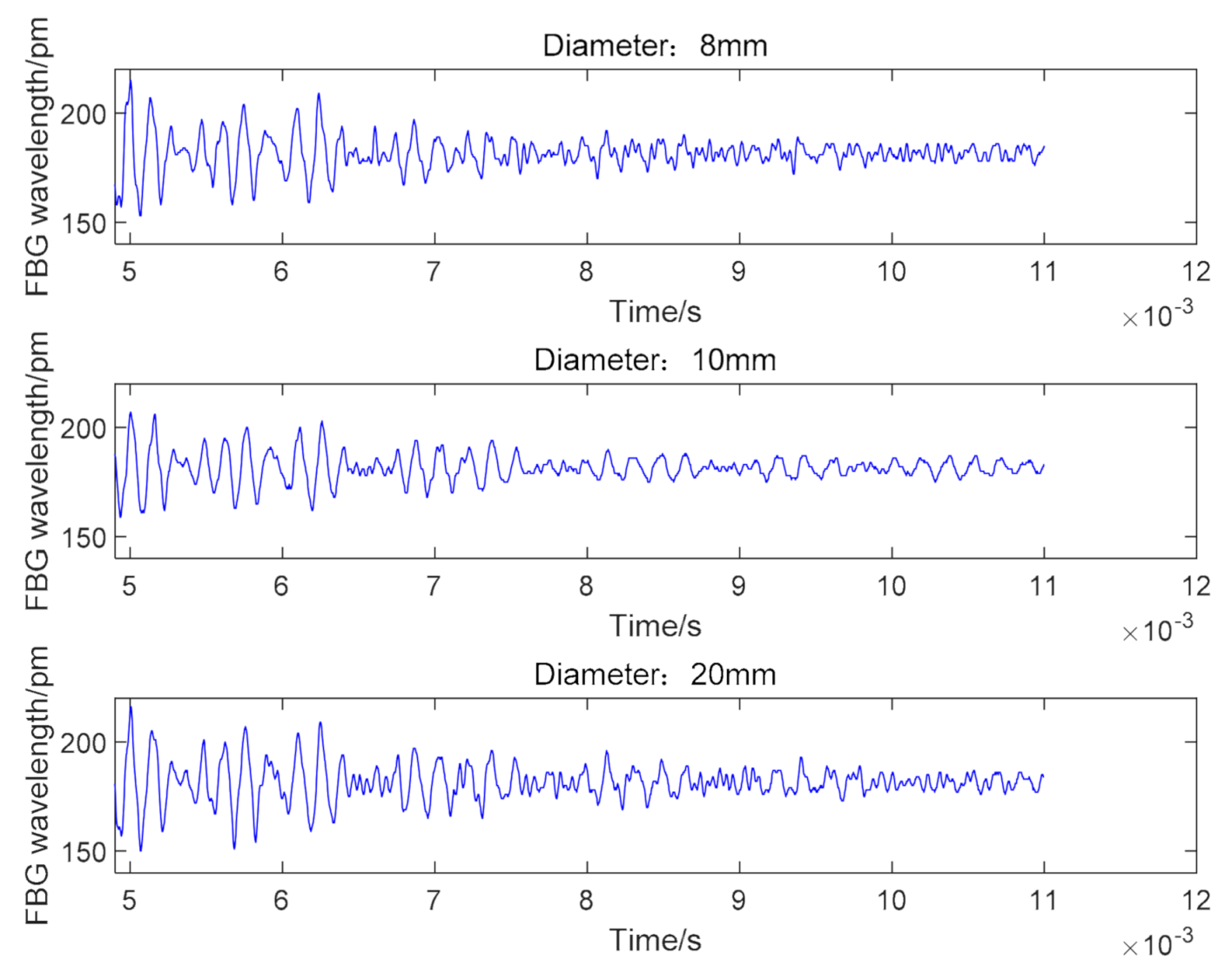
4.3.1. Control the Diameter of the Steel Ball Unchanged
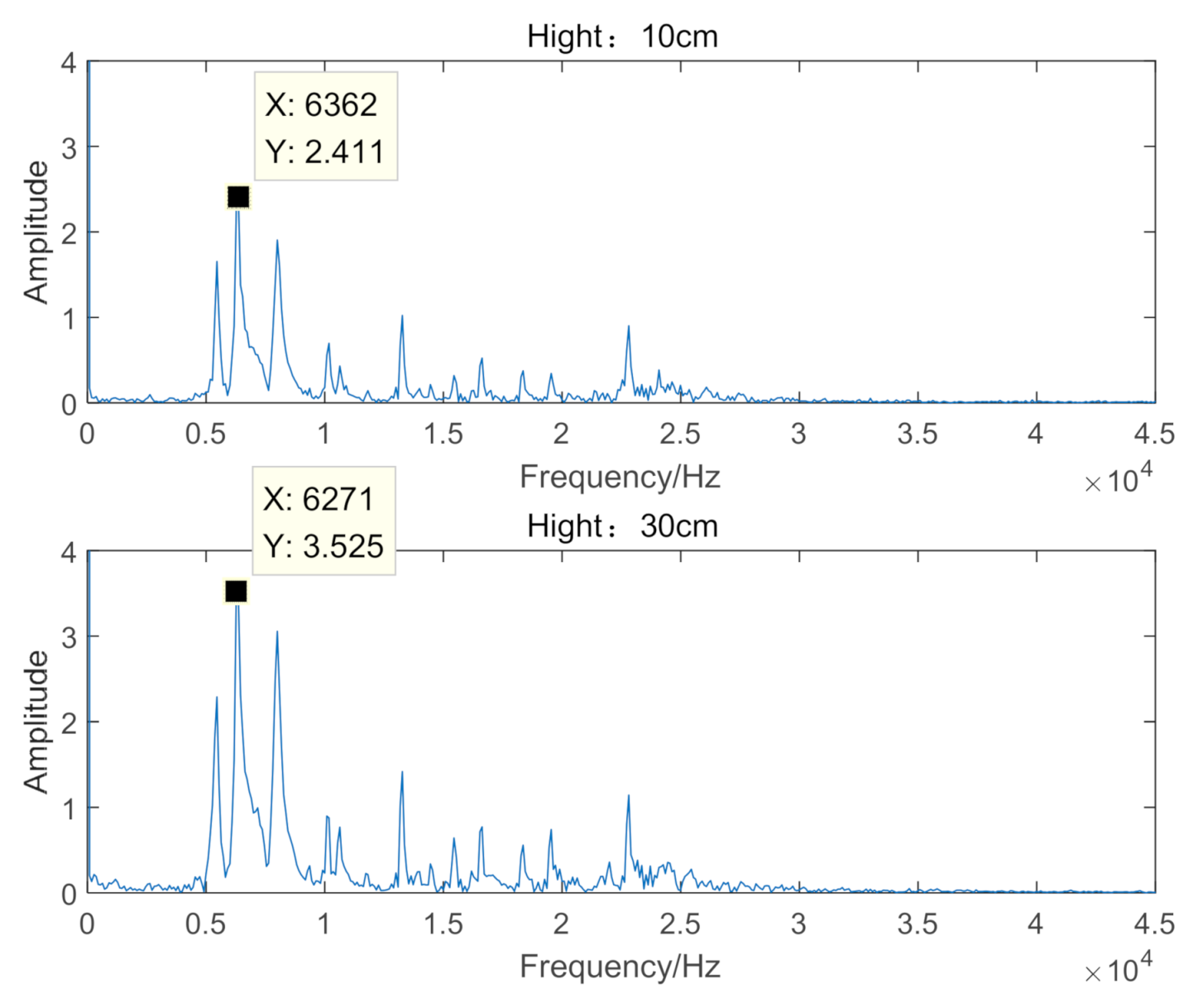
4.3.2. Control the Drop Height of the Steel Ball Unchanged
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, T.; Guo, Y.; Wang, G.; Sui, G. Method of bearing fault diagnosis based on time-frequency manifold analysis. Vibroeng. Procedia 2020, 30, 32–37. [Google Scholar] [CrossRef] [Green Version]
- Wei, S.; Yu, X.C.; Jia, D.Z.; Guo, Z.L. Research on measurement results consistency method of rolling bearing vibration measuring instrument. Mech. Eng. 2019, 5, 130–135. [Google Scholar]
- Luo, J.; Zhang, S. Rolling Bearing Incipient Fault Detection Based on a Multi-Resolution Singular Value Decom-position. Appl. Sci. 2019, 9, 4465. [Google Scholar] [CrossRef] [Green Version]
- Jun, Q.L.; Zhen, P.W.; Depot, D.L. Application research of thermal balance in bearing temperature analysis for locomotive trac-tion motor. Railw. Locomot. Car 2019, 11, 57–64. [Google Scholar]
- Shi, D.Z.; Min, G. Analysis and treatment of high bearing temperature occurred on a 300MW turbine generator unit. Power Syst. Eng. 2019, 5, 110–115. [Google Scholar]
- Liu, J.; Shi, Z.; Shao, Y. A numerical investigation of the plastic deformation at the spall edge for a roller bearing. Eng. Fail. Anal. 2017, 10, 263–271. [Google Scholar] [CrossRef]
- Zhang, Y. Bearing fault detection based on MEMS acceleration sensor. Electron. Devices 2017, 6, 226–231. [Google Scholar]
- Li, N.; Wei, P.; Mo, H.; Mei, S.K.; Li, M. Bearing state monitoring using a novel fiber Bragg grating acoustic emission technique. J. Vib. Shock 2015, 34, 172–177. [Google Scholar]
- Yao, K.; Lin, Q.; Jiang, Z.; Zhao, N.; Tian, B.; Shi, P.; Peng, G.-D. Modeling and Analysis of a Combined Stress-Vibration Fiber Bragg Grating Sensor. Sensors 2018, 18, 743. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, H.; Lin, Q.; Han, F.; Zhao, L.; Jiang, Z. Design and analysis of high-frequency fiber Bragg grating vibration sensor. Meas. Sci. Technol. 2021, 32, 025108. [Google Scholar] [CrossRef]
- Mohanty, L.; Yang, Y.; Tjin, S.C. Passively Conducted Vibration Sensing with Fiber Bragg Gratings. Appl. Sci. 2018, 8, 1599. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.Z.; Liu, C. Design of vibration sensor based on fiber Bragg grating. Hotonic Sens. 2017, 7, 140–147. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Guo, Y.; Xiong, L.; Wu, H. High-Frequency Optical Fiber Bragg Grating Accelerometer. IEEE Sens. J. 2018, 18, 4954–4960. [Google Scholar] [CrossRef]
- Oyeleke, K.S.; Olusola, O.I.; Vincent, U.E.; Ghosh, D.; McClintock, P.V. Parametric vibrational resonance in a gyroscope driven by dual-frequency forces. Phys. Lett. A 2021, 387, 127040. [Google Scholar] [CrossRef]
- Jia, P.; Leng, Y.; Yang, J. On the Aperiodic Signal Amplification by Rescaled Vibrational Reso-nance in Fractional-Order Duffing Oscillators. J. Comput. Nonlinear Dyn. 2020, 15, 071001. [Google Scholar] [CrossRef]
- Lai, Z.H.; Wang, S.B.; Zhang, G.Q.; Zhang, C.L.; Zhang, J.W. Rolling Bearing Fault Diagnosis Based on Adaptive Multiparameter-Adjusting Bistable Stochastic Resonance. Shock Vib. 2020, 2020, 6096024. [Google Scholar] [CrossRef] [Green Version]
- Xiao, L.; Bajric, R.; Zhao, J.; Tang, J.; Zhang, X. An adaptive vibrational resonance method based on cascaded varying stable-state nonlinear systems and its application in rotating machine fault detection. Nonlinear Dyn. 2021, 103, 715–739. [Google Scholar] [CrossRef]
- Wei, P.; Dai, Z.; Zheng, L.; Li, M. Fault diagnosis of the rolling bearing with optical fiber Bragg grating vibration sensor. Opt. Meas. Technol. Instrum. 2016, 10155, 1015521. [Google Scholar] [CrossRef]
- Roveri, N.; Carcaterra, A.; Sestieri, A. Real-time monitoring of railway infrastructures using fibre Bragg grating sensors. Mech. Syst. Signal Process. 2015, 60-61, 14–28. [Google Scholar] [CrossRef]
- Lyu, G.; Jiang, Y.; Wang, C.; Zhao, J.; Che, G.; Jiang, X. Simulation design of fiber Bragg grating resonant sensor for train bearing damage detection. In Proceedings of the 2018 Asia Communications and Photonics Conference (ACP), Hangzhou, China, 26–29 October 2018. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Wang, E.; Jiang, Y.; Zhan, H.; Li, H.; Lyu, G.; Sun, S. Generalized Resonance Sensor Based on Fiber Bragg Grating. Photonics 2021, 8, 156. https://doi.org/10.3390/photonics8050156
Chen X, Wang E, Jiang Y, Zhan H, Li H, Lyu G, Sun S. Generalized Resonance Sensor Based on Fiber Bragg Grating. Photonics. 2021; 8(5):156. https://doi.org/10.3390/photonics8050156
Chicago/Turabian StyleChen, Xinxin, Enbo Wang, Yali Jiang, Hui Zhan, Hongwei Li, Guohui Lyu, and Shuli Sun. 2021. "Generalized Resonance Sensor Based on Fiber Bragg Grating" Photonics 8, no. 5: 156. https://doi.org/10.3390/photonics8050156
APA StyleChen, X., Wang, E., Jiang, Y., Zhan, H., Li, H., Lyu, G., & Sun, S. (2021). Generalized Resonance Sensor Based on Fiber Bragg Grating. Photonics, 8(5), 156. https://doi.org/10.3390/photonics8050156