Adaptive Particle Swarm Optimization for Automatic Design of Common Aperture Optical System

Abstract
:1. Introduction
2. Optimal Design Method and Principle
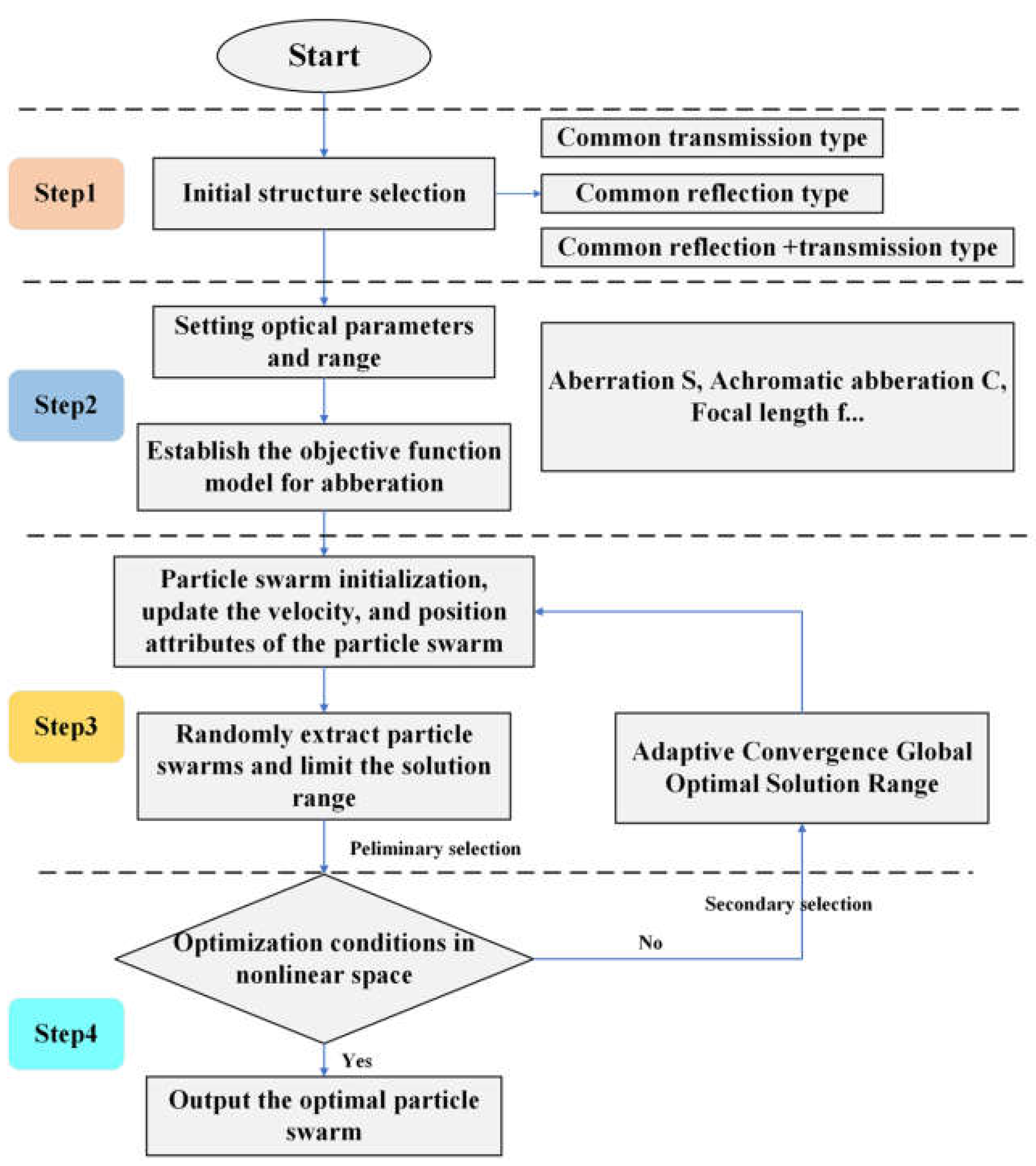
2.1. Adaptive Particle Swarm Optimization Algorithm
2.2. Multi-Level Screening Principle and Optimal Design Method
3. APSO Calculation and Result
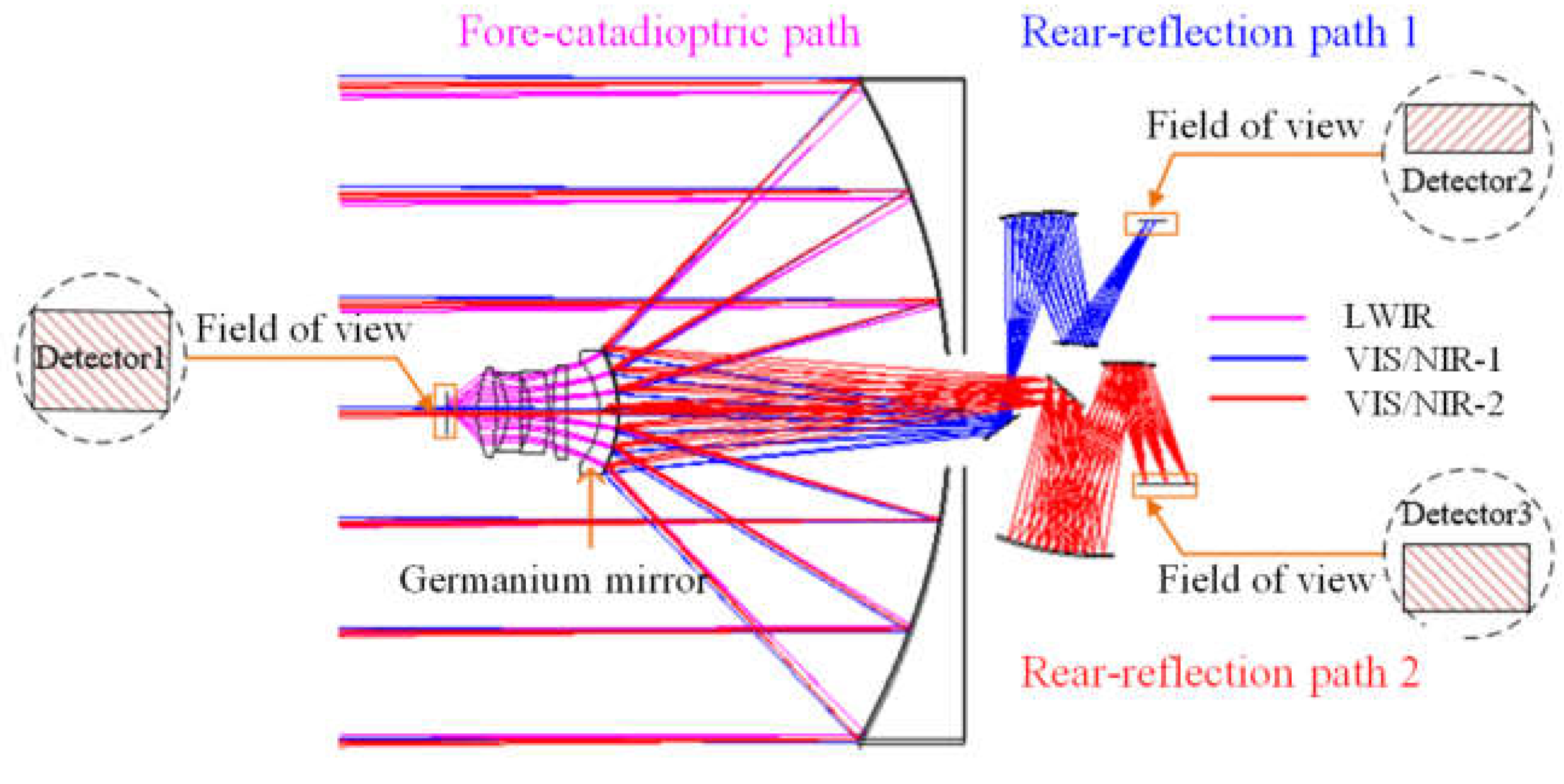
3.1. Initial Layout of Three-Dimensional Compact System
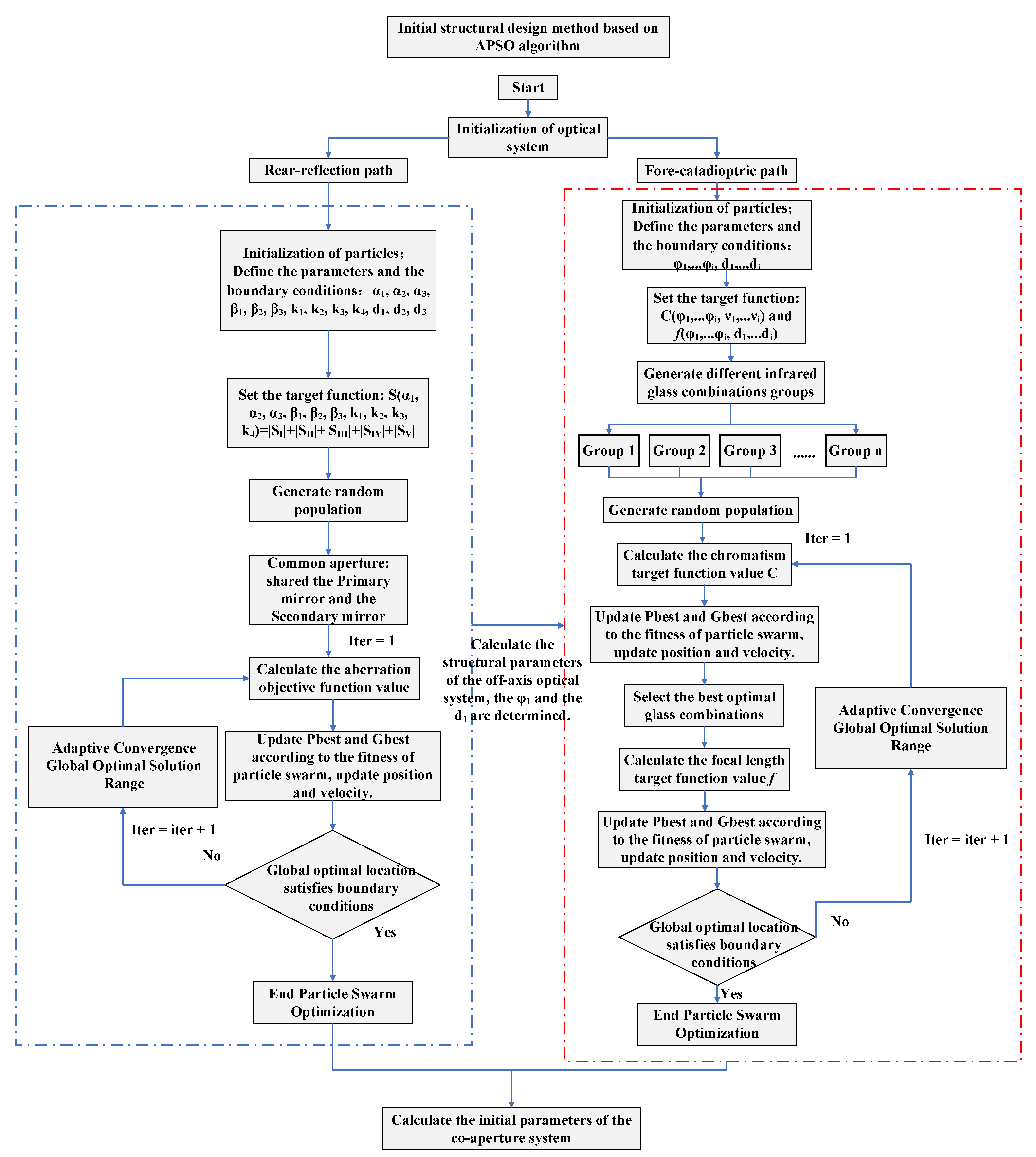
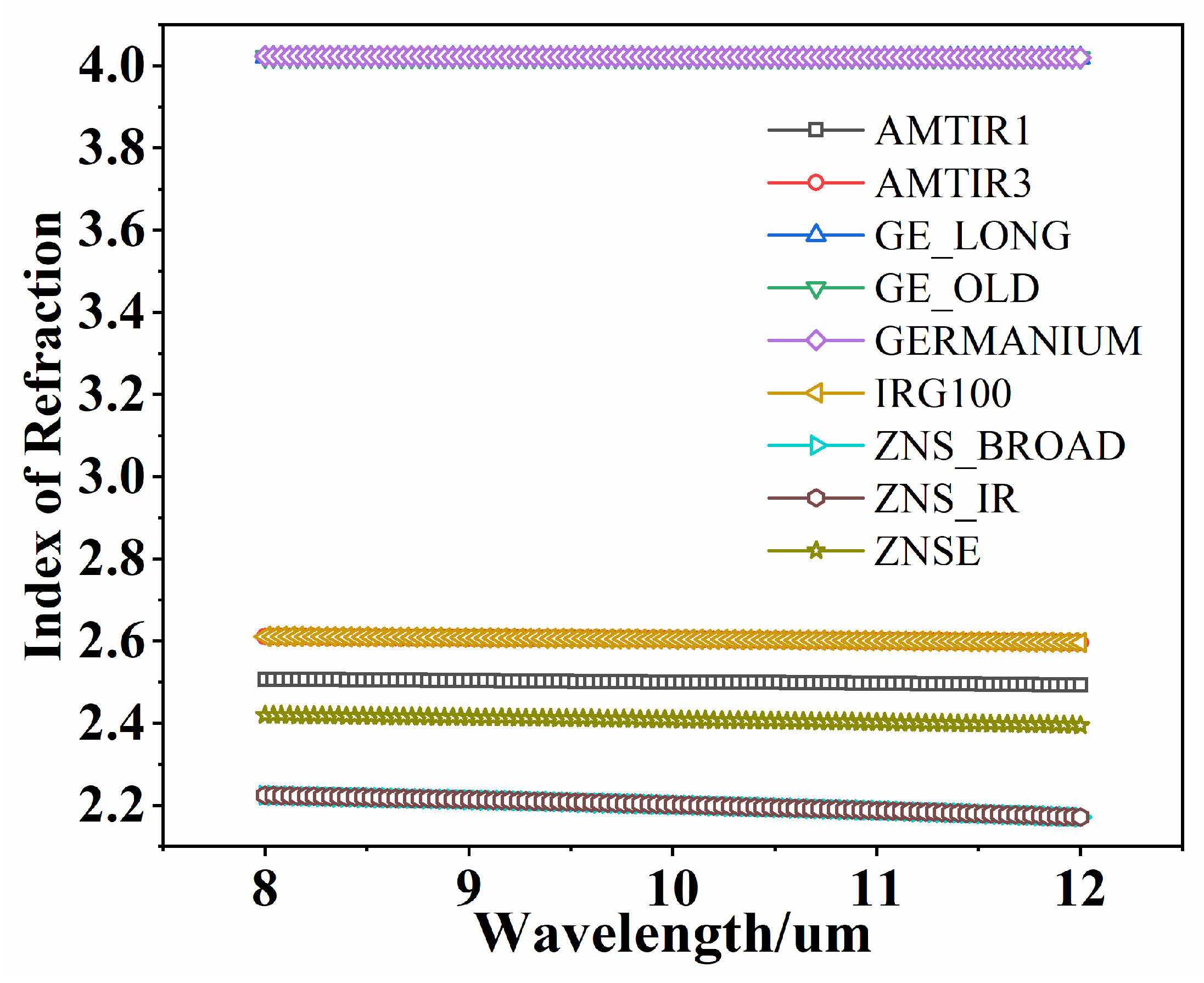
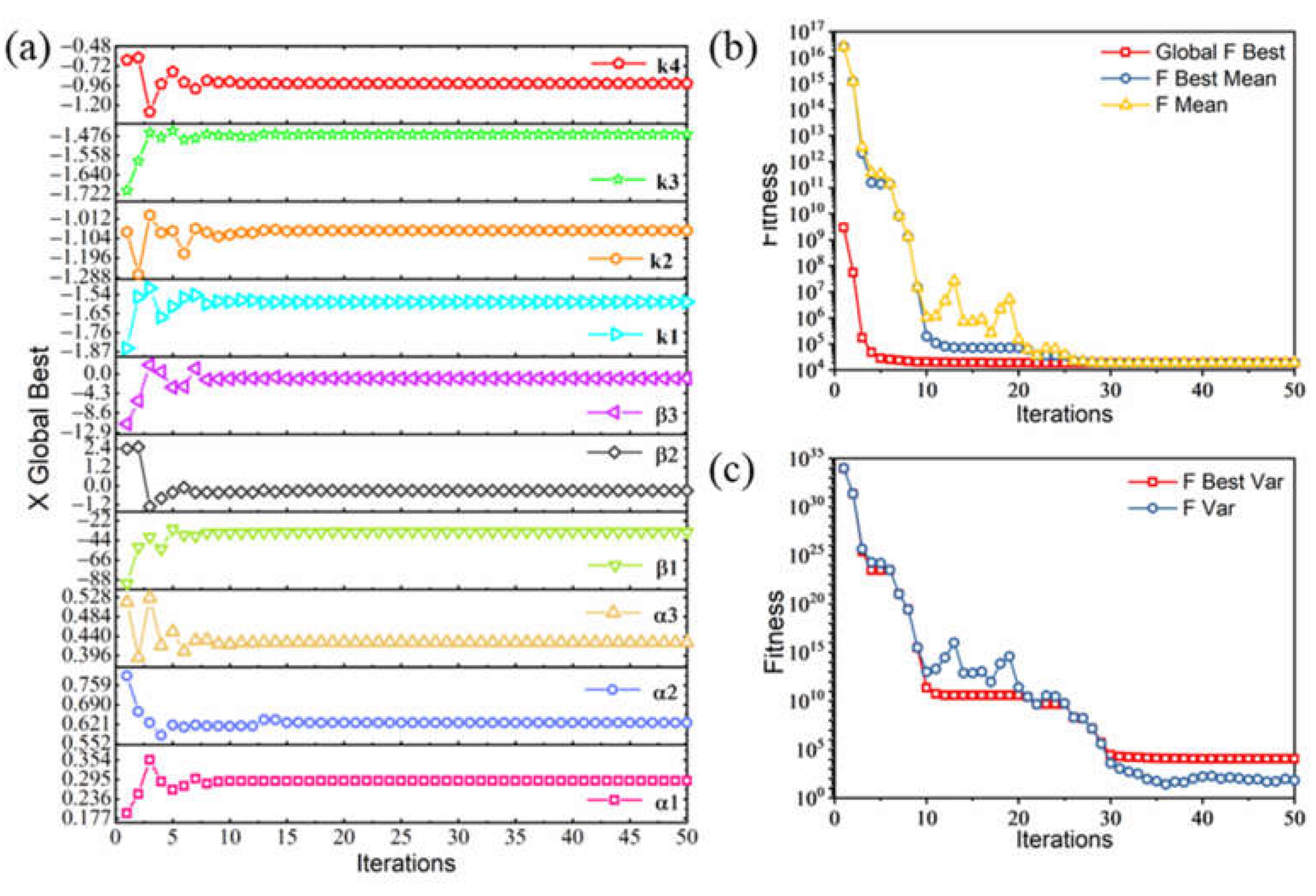
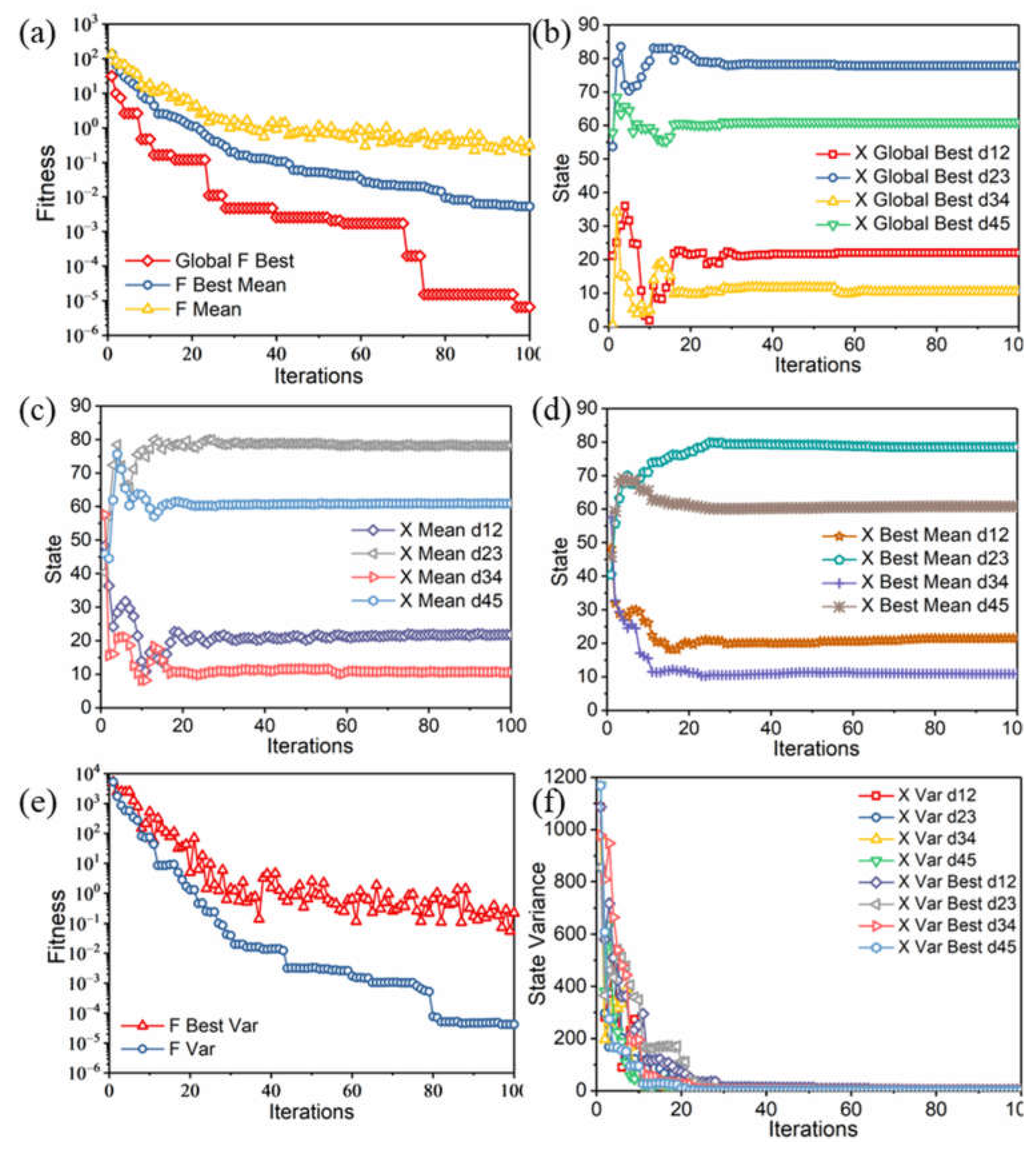
3.2. Initial Structure Calculation Based on Adaptive Algorithm
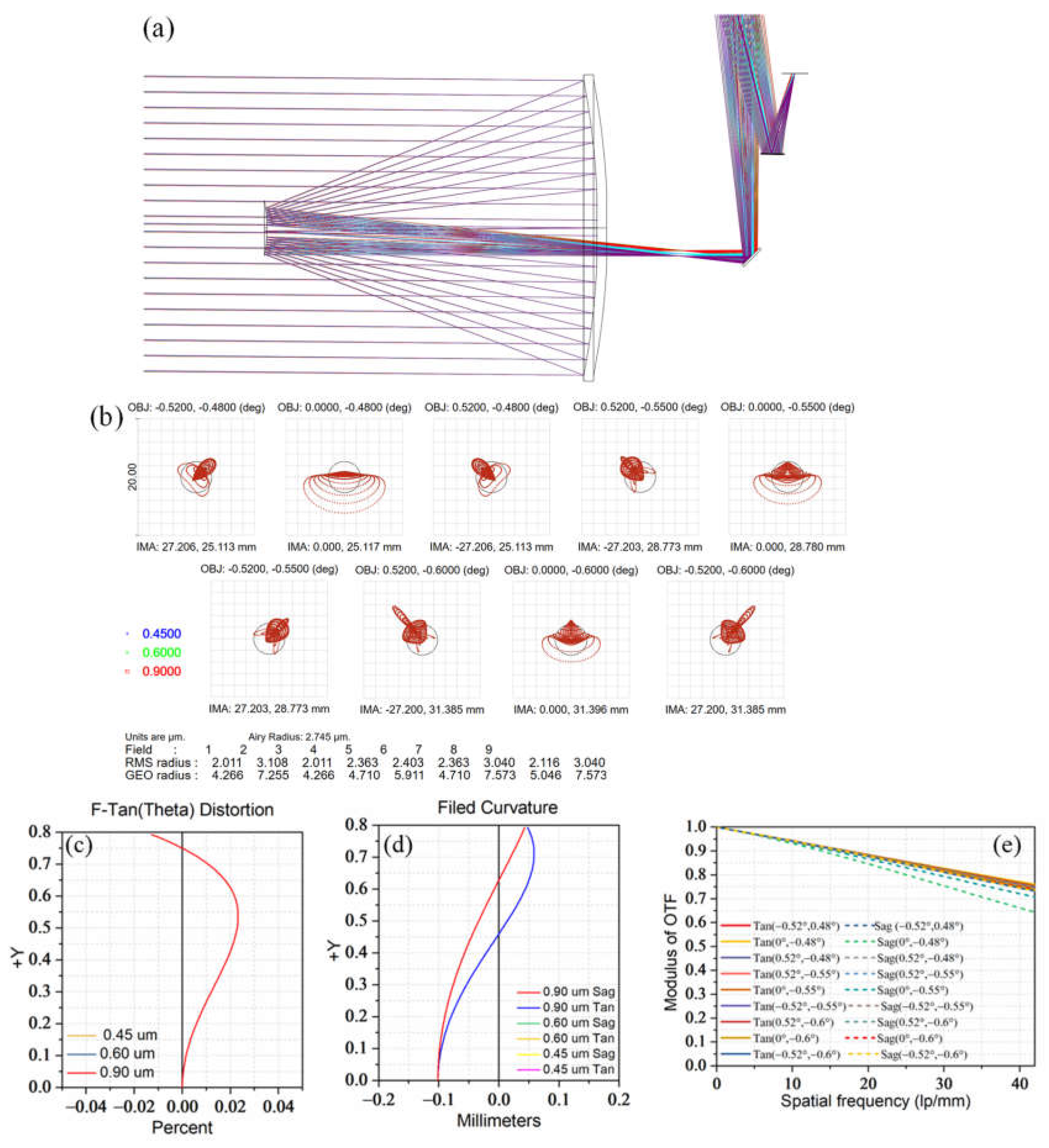
4. Design Example and Results Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Antipa, N.; Kuo, G.; Heckel, R.; Mildenhall, B.; Bostan, E.; Ng, R.; Waller, L. DiffuserCam: Lensless single-exposure 3D imaging. Optica 2018, 5, 1–9. [Google Scholar] [CrossRef]
- Cui, S.C.; Zhen, X.B.; Wang, Z.; Yang, S.Z.; Zhu, W.Y.; Li, X.B.; Huang, H.H.; Wei, H.L. Toward a new radiative-transfer-based model for remote sensing of terrestrial surface albedo. Opt. Lett. 2015, 40, 3842–3845. [Google Scholar] [CrossRef] [PubMed]
- Carles, G.; Harvey, A.R. Multi-aperture imaging for flat cameras. Opt. Lett. 2020, 45, 6182–6185. [Google Scholar] [CrossRef]
- Mait, J.N.; Athale, R.; van der Gracht, J. Evolutionary paths in imaging and recent trends. Opt. Express 2003, 11, 2093–2101. [Google Scholar] [CrossRef] [PubMed]
- Mico, V.; Zalevsky, Z.; Garcia, J. Superresolution optical system by common-path interferometry. Opt. Express 2006, 14, 5168–5177. [Google Scholar] [CrossRef]
- Vizgaitis, J.N.; Hastings, A. Dual band infrared picture-in-picture systems. Opt. Eng. 2013, 52, 061306. [Google Scholar] [CrossRef]
- Guo, D.B.; Yin, L.; Yuan, G. New automatic optical design method based on combination of particle swarm optimization and least squares. Optics Express 2019, 27, 17027–17040. [Google Scholar] [CrossRef]
- Guo, Y.L.; Yu, X.; Tao, Y.; Jiang, X. Design of Visible and IR infrared Dual-Band Common-path Telescope System. In Proceedings of the International Conference on Optical Instruments and Technology (OIT)/6th Conference of Optical Systems and Modern Optoelectronic Instruments, Beijing, China, 28–30 October 2017; Volume 10616, p. 1061613. [Google Scholar]
- Jeong, D.; Lee, J.H.; Jeong, H.; Ok, C.M.; Park, H.W. Infrared Dual-field-of-view Optical System Design with Electro-Optic/Laser Common-aperture Optics. Curr. Opt. Photonics 2018, 2, 241–249. [Google Scholar]
- Yuan, L.Y.; He, Z.P.; Lv, G.; Wang, Y.M.; Li, C.L.; Xie, J.N.; Wang, J.Y. Optical design, laboratory test, and calibration of airborne long wave infrared imaging spectrometer. Opt. Express 2017, 25, 22440–22454. [Google Scholar] [CrossRef]
- Liu, X.; Chang, J.; Zhong, Y.; Feng, S.; Song, D.L.; Hu, Y.Y. Optical design of a simultaneous polarization and multispectral imaging system with a common aperture. J. Mod. Opt. 2020, 67, 462–468. [Google Scholar] [CrossRef]
- de Albuquerque, B.F.C.; de Sousa, F.L.; Montes, A.S. Multi-objective approach for the automatic design of optical systems. Opt. Express 2016, 24, 6619–6643. [Google Scholar] [CrossRef]
- Schifano, L.; Smeesters, L.; Berghmans, F.; Dewitte, S. Optical System Design of a Wide Field-of-View Camera for the Characterization of Earth’s Reflected Solar Radiation. Remote Sens. 2020, 12, 2556. [Google Scholar] [CrossRef]
- Tang, R.R.; Zhang, B.Q.; Jin, G.F.; Zhu, J. Multiple surface expansion method for design of freeform imaging systems. Opt. Express 2018, 26, 2983–2994. [Google Scholar] [CrossRef]
- Yang, M.; Xu, W.B.; Sun, Z.Y.; Wu, H.; Tian, Y.Z.; Li, L.T. Mid-wave infrared polarization imaging system for detecting moving scene. Opt. Lett. 2020, 45, 5884–5887. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm-Explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef] [Green Version]
- Li, R.C.; Feng, L.J.; Xu, K.J.; Wang, N.; Fan, X.W. Optical design of an integrated imaging system of optical camera and synthetic aperture radar. Opt. Express 2021, 29, 36796–36812. [Google Scholar] [CrossRef]
- Chen, Y.; Gao, M.; Song, X. Method to design the common aperture multi-band optical system based on the PSO algorithm. Opt. Express 2021, 29, 18325–18335. [Google Scholar] [CrossRef]
- Yu, X.; Wang, H.; Yao, Y.; Tan, S.; Xu, Y.; Ding, Y. Automaic design of a mid-wavelength infrared dual-conjugate zoom system based on particle swarm optimization. Opt. Express 2021, 29, 14868–14882. [Google Scholar] [CrossRef]
- Oiknine, Y.; August, I.; Stern, A. Multi-aperture snapshot compressive hyperspectral camera. Opt. Lett. 2018, 43, 5042–5045. [Google Scholar] [CrossRef]
- Parsopoulos, K.E.; Vrahatis, M.N. Recent approaches to global optimization problems through Particle Swarm Optimization. Nat. Comput. 2002, 1, 235–306. [Google Scholar] [CrossRef]
- Menke, C. Application of particle swarm optimization to the automatic design of optical systems. Proc. SPIE 2018, 10690, 106901A. [Google Scholar]
- Fan, Z.C.; Wei, S.L.; Zhu, Z.G.; Ma, D.L. Globally optimal first-order design of zoom systems with fixed foci as well as high zoom ratio. Opt. Express 2019, 27, 38180–38190. [Google Scholar] [CrossRef] [PubMed]
- Qin, H. Article swarm optimization applied to automatic lens design. Opt. Commun. 2011, 284, 2763–2766. [Google Scholar] [CrossRef]
- Duma, V.-F. Radiometric versus geometric, linear, and nonlinear vignetting coefficient. Appl. Opt. 2009, 48, 6355–6364. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SpD (D = 10) | α1, α2, α3 ∈ [0,1]; β1, β2, β3 ∈ [–100,100]; k1, k2, k3, k4 ∈ [–3,3]; | |||||
|---|---|---|---|---|---|---|
| APSO | w | c1 | c2 | N | iter | |
| wmax | wmin | 0.6 | 0.9 | 30 | 50 | |
| 1.2 | 0.6 | |||||
| Sp1 D (D = 5) | φ1, φ2, φ3, φ4, φ5 ∈ [–500,500] | |||||
|---|---|---|---|---|---|---|
| APSO | w | c1 | c2 | N | iter | |
| wmax | wmin | 0.6 | 0.9 | 30 | 100 | |
| 1.2 | 0.6 | |||||
| Sp2 D (D = 4) | d12, d23, d34, d45 ∈ [0,100] | |||||
|---|---|---|---|---|---|---|
| APSO | w | c1 | c2 | N | iter | |
| wmax | wmin | 0.6 | 0.9 | 30 | 100 | |
| 1.2 | 0.6 | |||||
| Lens | Material | Optical Power/mm−1 |
|---|---|---|
| 1 | Germanium | −0.010 |
| 2 | AMTIR3 | 0.003 |
| 3 | AMTIR1 | −0.003 |
| 4 | Ge_LONG | 0.008 |
| 5 | Ge_LONG | 0.010 |
| Surface | Radius/mm | Thickness/mm | Conic |
|---|---|---|---|
| Primary mirror | 1592.1 | 664 | −0.99 |
| Secondary mirror | 290.2 | 1041.6/1205.8 | −1.66 |
| folding mirror | Infinity | 500/333.8 | 0 |
| Tertiary mirror | 627.3/640.4 | 350/383.2 | −1.25/1 |
| fourth mirror | −802.7/750.6 | 158.5/178.76 | −1/−2 |
| Surface | Optical Power /mm−1 | Thickness/mm | Glass |
|---|---|---|---|
| 1st lens | −0.01000 | 20 | GE_LONG |
| 2st lens | 0.003028 | 20 | AMTIR3 |
| 3st lens | −0.003348 | 20 | AMTIR3 |
| 4st lens | 0.008968 | 45 | GE_LONG |
| 5st lens | 0.010298 | 42 | GE_LONG |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yue, W.; Jin, G.; Yang, X. Adaptive Particle Swarm Optimization for Automatic Design of Common Aperture Optical System. Photonics 2022, 9, 807. https://doi.org/10.3390/photonics9110807
Yue W, Jin G, Yang X. Adaptive Particle Swarm Optimization for Automatic Design of Common Aperture Optical System. Photonics. 2022; 9(11):807. https://doi.org/10.3390/photonics9110807
Chicago/Turabian StyleYue, Wei, Guang Jin, and Xiubin Yang. 2022. "Adaptive Particle Swarm Optimization for Automatic Design of Common Aperture Optical System" Photonics 9, no. 11: 807. https://doi.org/10.3390/photonics9110807
APA StyleYue, W., Jin, G., & Yang, X. (2022). Adaptive Particle Swarm Optimization for Automatic Design of Common Aperture Optical System. Photonics, 9(11), 807. https://doi.org/10.3390/photonics9110807