1. Introduction
Distributed optical fiber sensors (DFSs) have attracted increasing attention in academia and industry over the past decades, as there are many intrinsic advantages such as employing the entire fiber as the sensing element, immunity to electromagnetic interference, easy installation, corrosion resistance, overall cost reduction, and the capability of distributed sensing in harsh environments [
1]. In general, DFSs are mainly based on three types of intrinsic physical phenomena in optical fiber, i.e., Rayleigh, Brillouin, or Raman scattering [
2,
3]. Different types of DFSs have been demonstrated and are widely used in real-world applications. For instance, Raman optical time domain reflectometry (ROTDR) has been widely used for distributed temperature sensing (DTS), Brillouin optical time domain reflectometry (BOTDR), and Brillouin optical time domain analysis (BOTDA) have been used for distributed strain and/or temperature sensing, distributed acoustic sensors (DASs) based on phase-sensitive optical time domain reflectometry (ϕ-OTDR) have been widely used for detecting vibrations. Polarization-sensitive optical time domain reflectometry (P-OTDR) has been demonstrated for measuring distributed physical fields such as magnetic fields, electric fields, temperature, and strain [
4].
Normally, the DFS interrogators are designed for usage in dry, indoor environments, and are usually installed in a server room or control room for practical applications. Therefore, there is always some distance between the targeted monitoring site and the interrogators, i.e., part of the fiber under test (FUT) does not act as the sensing fiber (SF), but only a lead fiber (LF). In other words, FUT = LF + SF. The LF has some negative effects on system performance. For example, in P-OTDR, perturbations on the LF will generate an unnecessary signal, which will mask the real signal in the SF. Feng Wang et al. demonstrated an approach for overcoming the perturbation of the LF in P-OTDR [
5]. Another negative effect of LF is its extra limitation on the maximum pulse repetition rate (MPRR) in DFSs. Conventionally, in the above DFS systems, only one optical pulse is allowed to propagate in the FUT at a time. The backscattered light is measured as a function of time corresponding to the distributed locations along the FUT. In other words, each optical pulse generates one trace corresponding to the entire fiber. Therefore, the MPRR is limited by the total length of the FUT. In some scenarios, the LF is a few times longer than the SF. As a result, the MPRR is mainly limited by the LF but not the SF. This issue is a practical problem in the field of DFS application.
Actually, in many real-world applications of DFSs, the LF is much longer than the SF, for example, when using DFSs to monitor underground mines or the deformation during coal mining. In 2007, Hiroshi Naruse et al. reported the field trial results of monitoring underground mines by using BOTDR; the total lengths of the SF and LF were 420 m and 2.6 km, respectively [
6]. In 2015, Gang Cheng et al. reported a field study of BOTDR-based overlying strata deformation monitoring during coal mining. Because there was no power at the project site and the transportation of the BOTDR interrogator was inconvenient, they used a remote monitoring scheme. The length of the LF for remote data collection was 3.7 km, while the total depth (sensing length) of the monitored rock strata was 600 m [
7]. For the above two applications, if the LF-induced limitation on the MPRR was overcome, the time cost of each measurement could be reduced by about 7 times.
In the past several years, thanks to the growing demand in areas such as structural health monitoring, geophysical science, and gas and oil industries, the research and development of DFS-based dynamic sensing for vibrations and dynamic strain measurement have been accelerated [
8]. As for BOTDA-based dynamic strain sensing, the sensing length conventionally ranges from tens of meters to a few hundred meters [
9,
10,
11], thus in many real-world applications, the LF is much longer than the SF. As for some applications of vibration detection systems based on ϕ-OTDR, such as monitoring runways of airports [
12], the LF may be also longer than the SF. The maximum detectable frequency (MDF) will be largely limited by the long LF. Therefore, there is a real demand to overcome the LF-induced limitation on the MPRR for applications in which the LF is longer than the SF, especially for dynamic sensing.
Monitoring the structural health of wind turbines is another example. DFSs such as PS-OTDR and BOTDA offer the ability to monitor the dynamic behavior and structural health of wind turbines [
13,
14]. For wind turbines installed in the ocean, due to the harsh surrounding environments, the interrogators cannot be installed at the site for long-term monitoring. As a result, there will be a substantial length of LF between the interrogator and the wind turbines, and the LF is much longer than the SF mounted on the wind turbines. With the conventional DFS solutions, the MPRR and MDF will be mainly limited by the long LF, which may be one of the reasons to limit the use of DFSs in monitoring the dynamic behavior of wind turbines. If the LF-induced limitation on the MPRR is overcome, the maximum detectable dynamic frequency can be increased significantly.
One more example is monitoring the dynamic strain response of a scale ship for developing a digital twin. In the maritime industry, structural digital twins based on physical sensor information and digital models, play a significant role in monitoring the dynamic structural responses, providing accurate assessments, predictions, and insights for structural integrity [
15,
16,
17]. A test of the scale model is often used to validate the digital model, and DFSs can be used for monitoring the global dynamic responses of the scale model. Conventionally, for monitoring a scale ship model which is on the water in a basin, it needs centimeter-level or even sub-centimeter-level spatial resolution and the length of the SF may be tens of meters, while the LF may be a few times longer. Due to the LF-induced limitation on the MPRR, the MDF of the existing DFSs’ solution may not meet the demand. For instance, in our ongoing project, one of the objectives is utilizing BOTDA to monitor the dynamic strain response of the scale ship model with a centimeter-level spatial resolution for developing a digital twin.
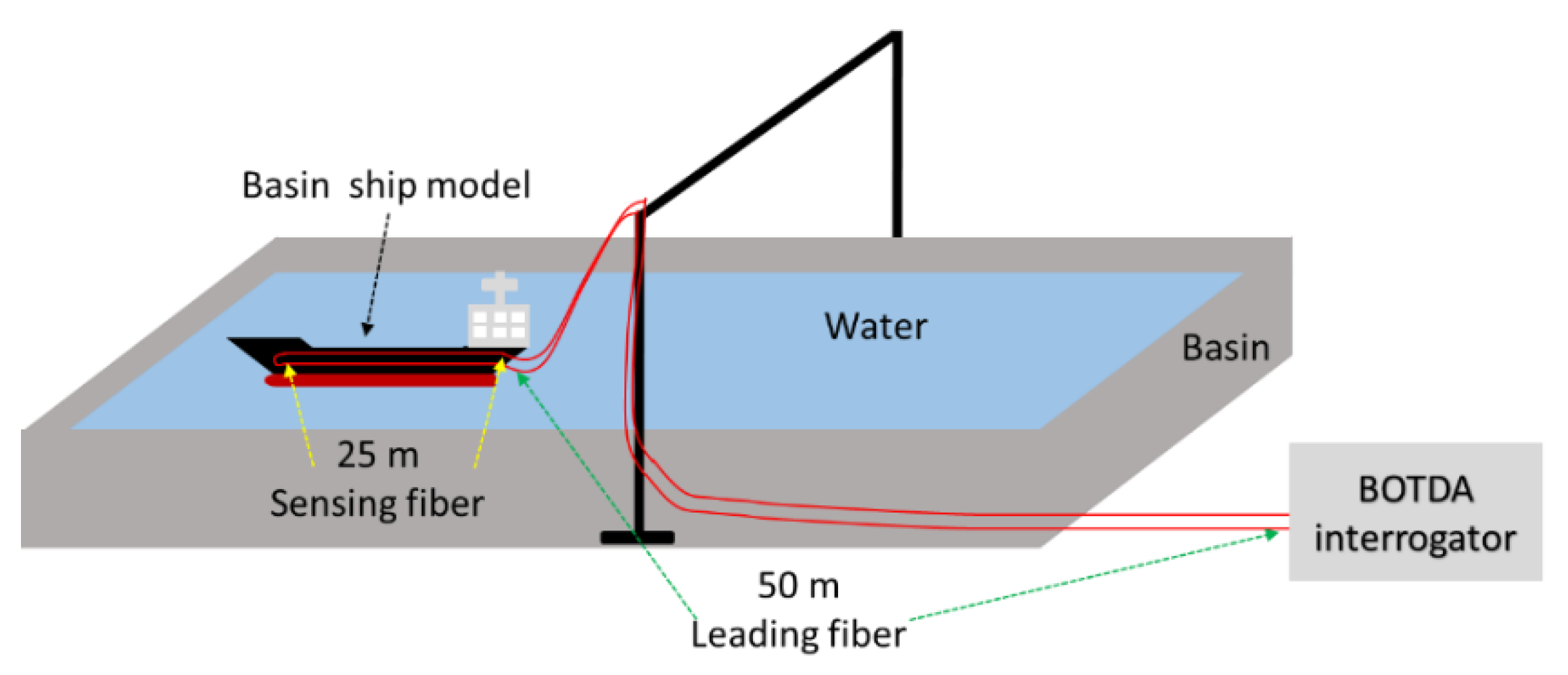
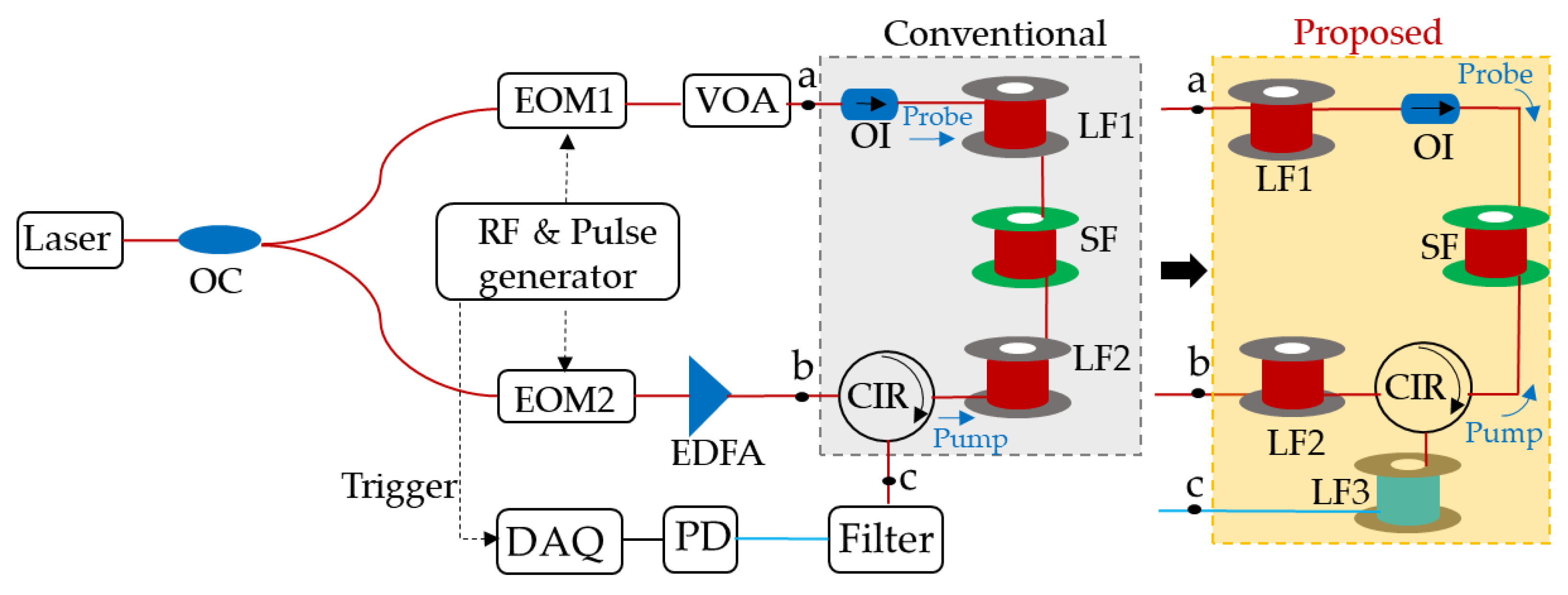
Figure 1 illustrates the schematic diagram of the experimental setup for monitoring the dynamic strain of the ship model. The ship model is on the water in a basin. The details of the basin can be found in [
17]. The length of the SF mounted on the ship model is only 25 m, while the lengths of the two LFs between the ship model and the BOTDA interrogator are about 50 m. To obtain a centimeter-level spatial resolution, the differential pulse-width pair (DPP) technique is used. The number of scanning frequencies is 200, and the traces are averaged by 250 times. If using the conventional configuration of BOTDA, the MPRR is limited by the total length of SF + LF, i.e., 125 m. According to Shannon–Nyquist sampling theory, the MDF is half of the MPRR (about 8 Hz). Therefore, the MDF is about 4 Hz. However, the targeted maximum frequency for the dynamic strain is 20 Hz. It should be noted that all the existing BOTDA interrogators in the market cannot meet our project demand. If the LF-induced limitation on the MPRR is overcome, then the MPRR only depends on the SF, i.e., 25 m, and the MDF can be increased to 20 Hz.
If the LF-induced extra limitation on the MPRR is overcome, the time cost of each sensing measurement can be reduced drastically. As a result, the MDF can be increased significantly for dynamic monitoring, or more average times for the signal within a certain timeframe can be realized, which will benefit the signal-to-noise ratio (SNR). Thus, solving the issue could have a great impact on some practical applications of DFSs. However, to the best of our knowledge, all the existing commercial DFS interrogators are designed for the entire FUT, i.e., they are designed without consideration of overcoming the LF-induced extra limitation on MPRR. In addition, there are also no prior papers reporting methods of overcoming the LF-induced extra limitation on MPRR.
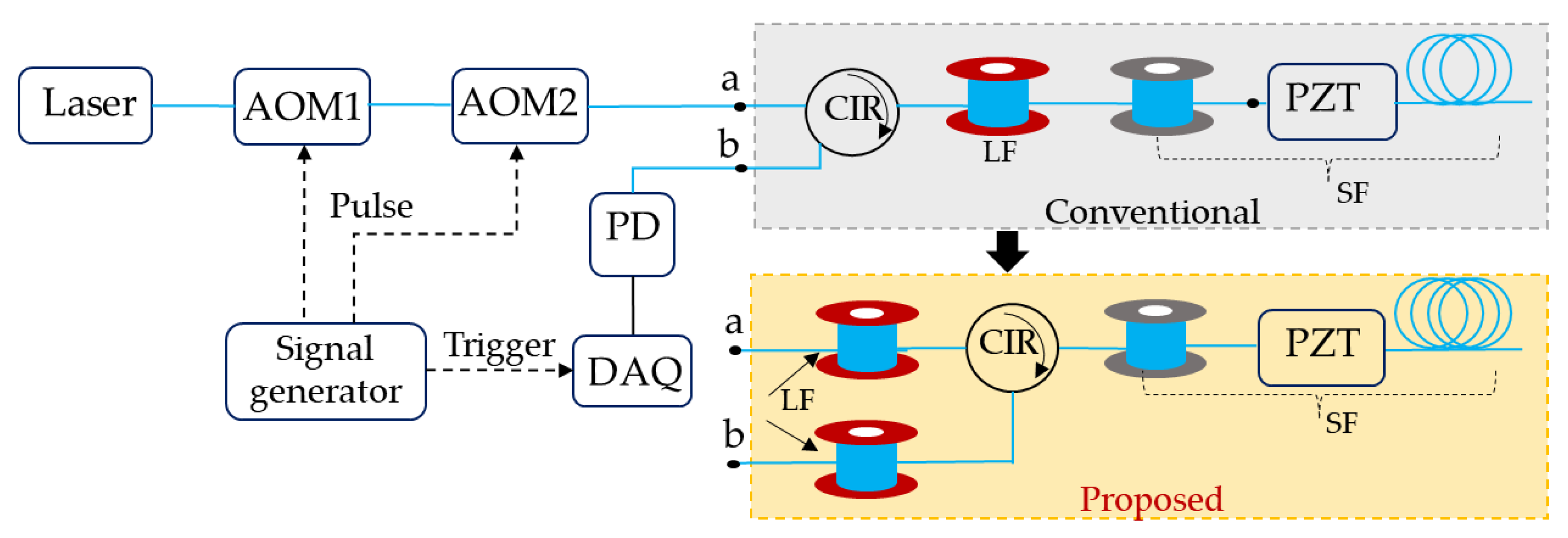
In this paper, for the first time, to the best of our knowledge, we propose a simple approach to effectively overcome the LF-induced extra limitation on the MPRR, which is a practical problem in DFSs for some real-world applications. Our proposed approach only needs to divide the conventional DFS interrogator into two parts, i.e., the in-house part and the on-site part, and then move the passive components, the optical circulator (CIR) and/or optical isolator (OI), to the on-site part. In detail, for single-end-access DFSs such as ϕ-OTDR, P-OTDR, ROTDR, and BOTDR, the CIR is moved to the on-site part from the interrogator. In other words, it only needs to change the relative positions of the LF and the CIR, i.e., moving the LF to the front of port 1 of the CIR, and adding one more LF between port 3 of the CIR and the photodetector (PD), as demonstrated in
Section 3. As for two-end-access DFSs such as conventional BOTDA, the OI and CIR are installed in the on-site part, i.e., in addition to adding one more LF, it only needs to change the relative positions of the original two LFs, OI, and CIR, as demonstrated in
Section 4. The proposed approach has been experimentally validated for ϕ-OTDR and BOTDA. Notably, the proposed approach only requires a minor system modification and could be easily implemented for other single-end-access DFSs mentioned above.
2. Operating Principle
In a conventional ɸ-OTDR system, a highly coherent optical pulse is launched into the FUT and the Rayleigh backscattered light from a great number of different scattering centers within the same optical pulse width interference coherently at the receiver. In the time domain, the backscattered light is a speckle-like trace during the duration corresponding to the whole length of the FUT.
The round-trip time (RTT)
of the optical pulse over the entire FUT can be expressed as:
where
L,
, and
c are the length of the FUT, group refractive index of the fiber, and speed of light in a vacuum, respectively [
18,
19,
20]. The MPRR is limited by RTT, which can be described by the equation for
:
when the FUT consists of LF and SF, Equation (2) can be rewritten as:
where
and
represent the lengths of LF and SF, respectively. Assuming the length of LF is
N times the SF, i.e.,
, Equation (3) can be further rewritten as:
As can be seen from Equations (3) and (4), when the length of the LF is much longer than that of the SF, the MPRR is mainly limited by the LF. By using our proposed approach, as the LF will not have an impact on the RTT, Equation (4) can be revised as
Comparing Equations (4) and (5), we can find that the MPRR can be increased by N + 1 times after using our proposed ɸ-OTDR configuration.
BOTDA is based on the stimulated Brillouin scattering (SBS) effect, which is realized by launching a pump pulse and a counter-propagating continuous-wave (CW) probe into the FUT from its two ends, respectively. SBS only occurs locally at the position where the probe and pump light meet [
21,
22]. The SBS signal is detected at the fiber end where the pump pulse launches, and recorded as a function of time which corresponds to the whole FUT length. Thus, the MPRR of BOTDA also depends on the RTT. Unlike single-end-access DFS systems, BOTDA has one LF at each side of the FUT, i.e., the FUT consists of two LFs and one SF. Therefore, Equation (4) can be rewritten as:
Similarly, after using our proposed revision, the LF-induced limitation on the MPRR of BOTDA can be removed, thus the MPRR can be increased by 2N + 1 times.
5. Discussion
Normally, in real-world applications, the DFS interrogators are installed in a server room or controlling room. In some scenarios, the interrogators may be far away from the sensing site. The long fiber between the interrogator and the sensing site only acts as an LF, which induces an extra limitation on the MPRR. It should be noted that, after overcoming the LF-induced extra limitation by using our approach, the measurement distance of DFSs will not be reduced, as the propagation distance of the light is the same as when using the conventional method. When the DFS interrogators are installed far away from the sensing site, in conventional DFS systems, the FUT consists of an LF and a sensing SF. By using our approach, FUT = SF, the LF-induced extra limitation on MPRR can be overcome. In other words, the MPRR only depends on the SF. As the MPRR is inversely proportional to the length of FUT, under the condition that the SNR is good enough, for a certain MPRR, the measurement range (i.e., SF) can be increased. Especially for Brillouin gain-based BOTDA, by using the conventional setup, due to the energy transfer between the probe and pump light in the long LF, the power of the pump may decrease significantly before it arrives at the SF. By using our approach, the energy transfer only occurs in the SF, thus, it is possible to have a larger sensing length.
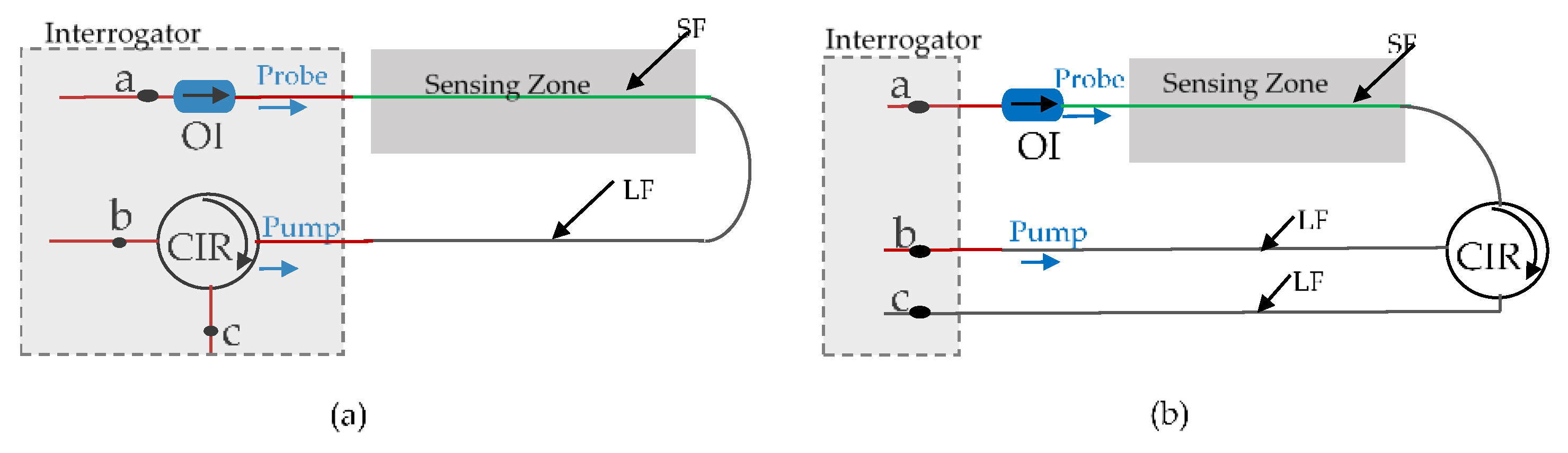
In fact, our proposed approach can also be used for the linear sensing applications of two-end-access BOTDA, even if the BOTDA interrogator is installed close to the sensing zone. For example, in the applications of monitoring pipelines, by using the conventional system, given that the probe light has to propagate up to the end of the sensing zone and back, the sensing range is limited to half of the BOTDA interrogator’s maximum measurement length [
23], as shown in
Figure 7a. After revising the system by using our approach, as shown in
Figure 7b, as there is no energy transfer between the pump and probe light in the LF, when the pump enters the SF, its power will be larger. As a result, the sensing range can be increased to the maximum measurement length of the BOTDA interrogator.
Our proposed approach is a simple and effective way to solve the practical problem of the LF inducing an extra limitation on the MPRR in DFSs. In addition, it does not introduce any additional complexity to the systems. Only one more LF is required, while in real-world applications, normally, there are a few fibers in the sensing optical fiber cable. One of the fibers can be used as the added LF. Therefore, the proposed approach will not increase the cost either.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






