Evolutionary Strategy for Practical Design of Passive Optical Networks

 , , , , ,
, , , , ,  and
and
Abstract
:1. Introduction
2. Discussion
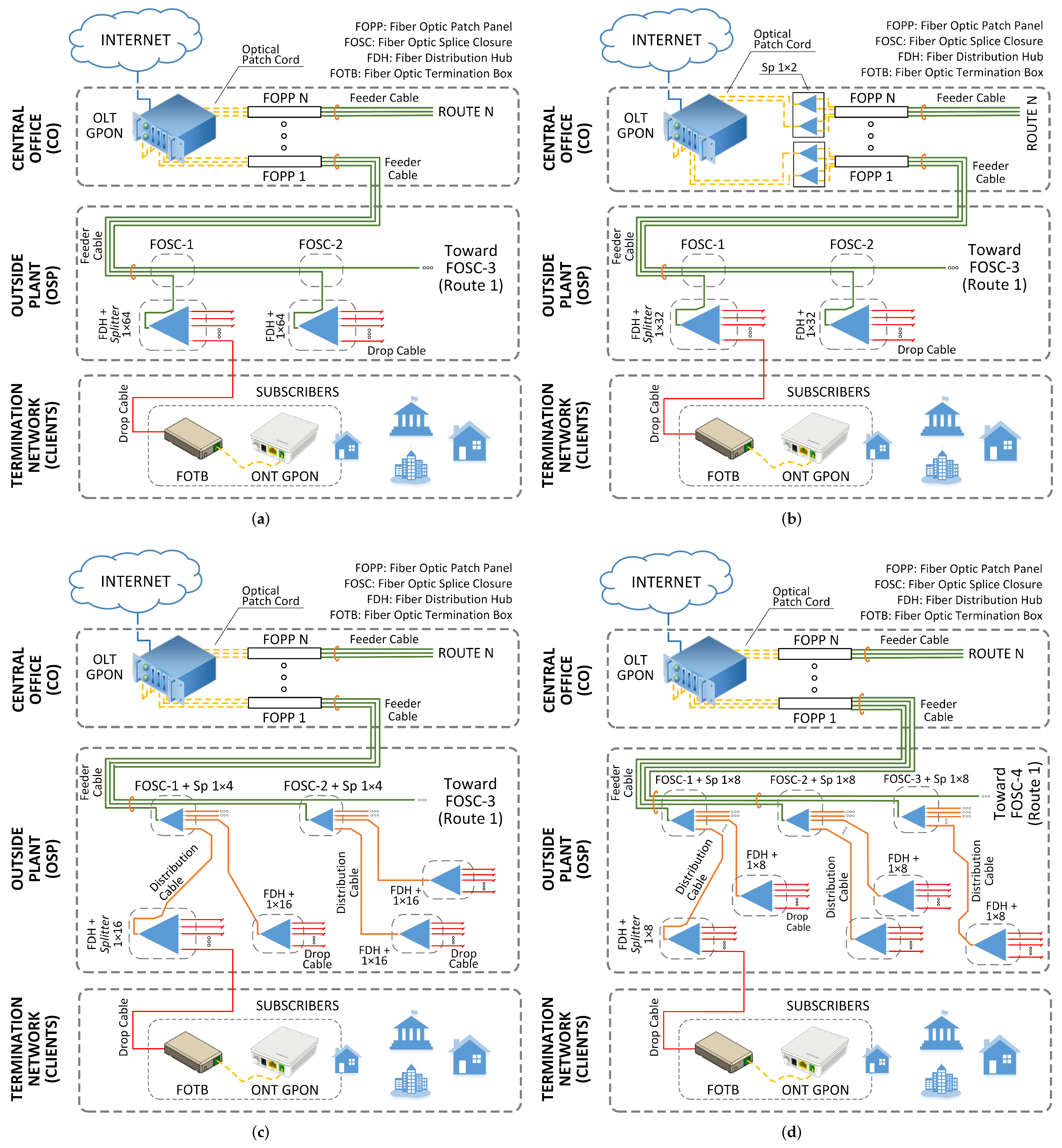
3. Adopted Topologies for Proposed Systems
3.1. CTT1
3.2. CTT2
3.3. DTT1
3.4. DTT2
4. Proposed Algorithm for PON Optimization
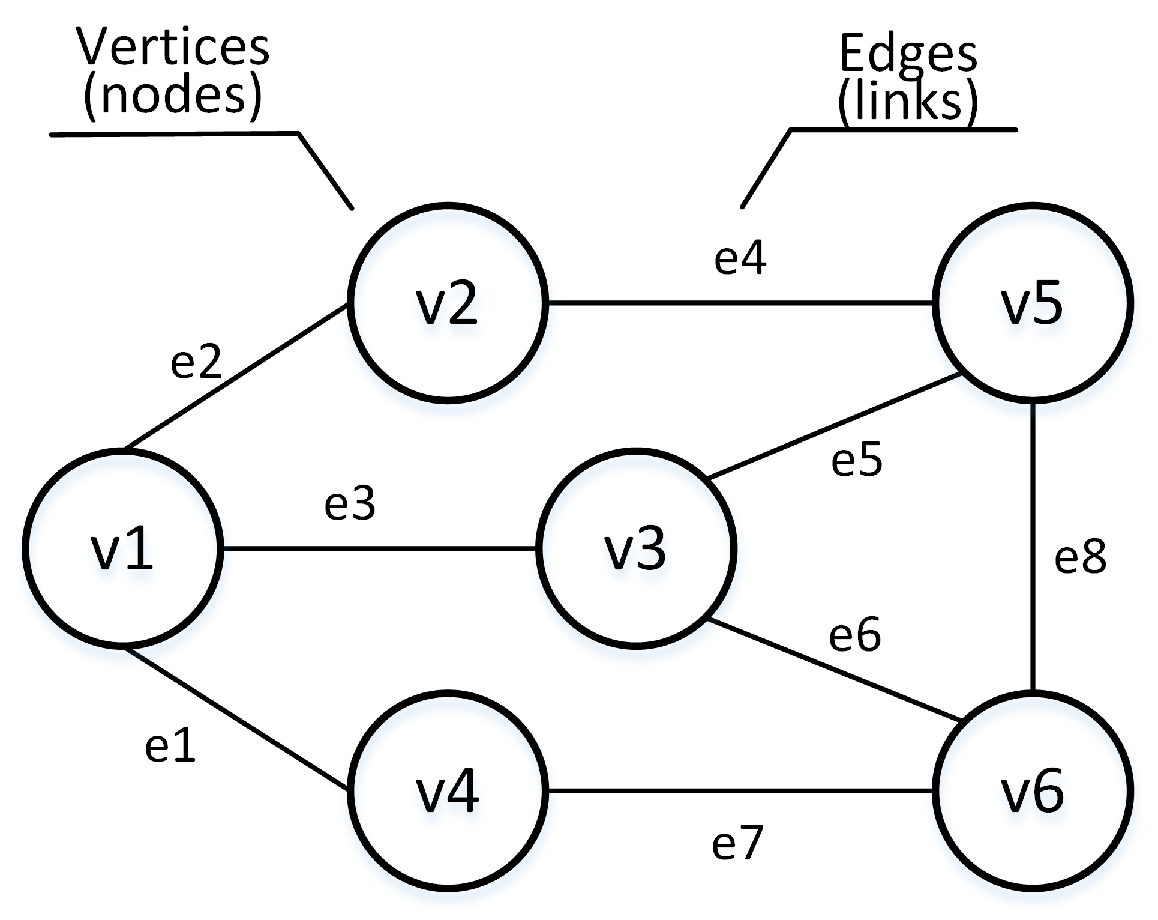
4.1. Theory of Graphs
4.2. Genetic Algorithm
4.3. Our Proposed Genetic Algorithm for Optimization of PONs Planning
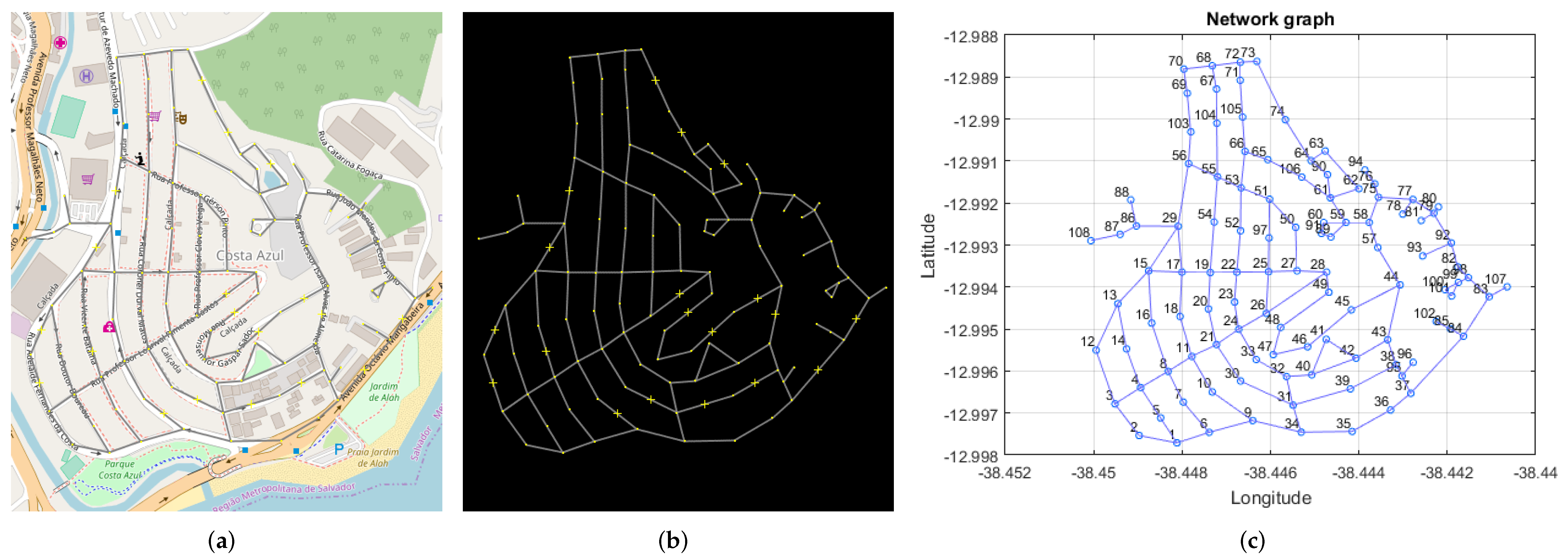
- (1) Import the georeferencing data obtained from the map: In this step, the georeferenced data of the region of interest is imported to Matlab®. OSM software is used to obtain the region’s raw data. The region of interest is selected and, in the file exported by the OSM, the intersections between streets (corners) are identified with global position system (GPS), as well as the links among those intersections. These raw data (.xml file) are then imported into Matlab® and a georeferenced graph of the region of interest is created. The weight of each edge of the graph’s adjacency matrix is the calculated distance (in meters) among the network nodes. Figure 4 shows a graphical example of importing georeferenced data to Matlab®, considering: (a) example of a region of interest (Costa Azul neighborhood, Salvador city, Brazil) with overlapping graph; (b) example of a region of interest to be imported into Matlab®; and (c) network graph, containing 108 nodes, imported to Matlab®.
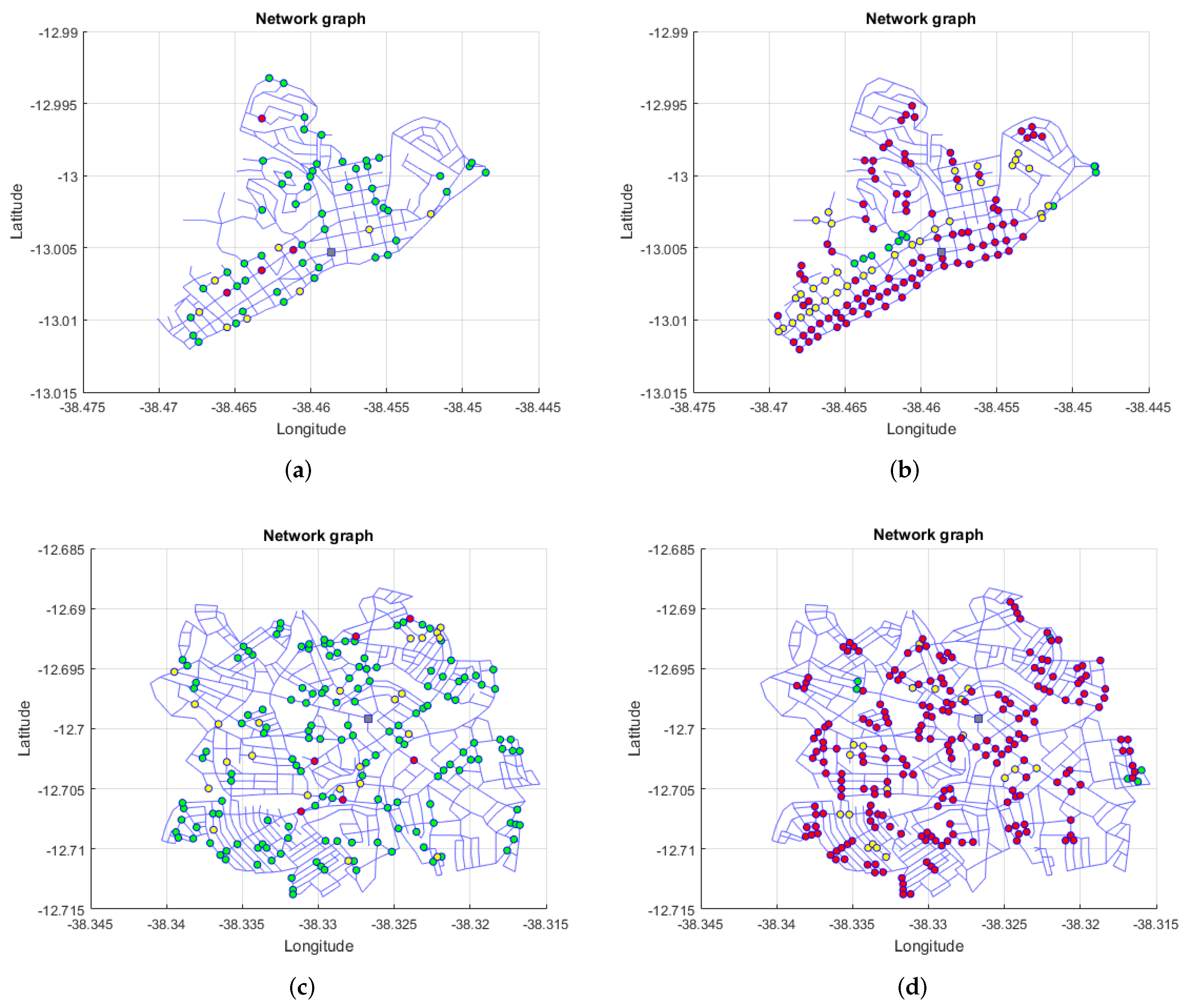
- (2) Set initial parameters: here, initial parameters must be defined. These parameters are:() Number of generations: defines how many iterations the GA will run;() Population size: defines the number of individuals of each GA generation;() Topology type: defines the topology (one of the four possible topologies described in Section 3);() Initial state: Defines the position of each potential subscriber in the respective scenario. Subscriber positions are represented by a matrix of , where N is 1 and M is the map graph dimension. Each value of the matrix will be the number of subscribers in that specific node. In this paper, we defined as possibility only two, four or seven subscribers. In this stage, we also set the location of the CO using another matrix . In the matrix, the node position holding the CO is set to 1 while other positions are set to 0. Figure 5 shows examples of initial states used as input of our simulations (as can be seen in Section 6). Green, yellow and red nodes represent, respectively: two, four and seven subscribers on the node;() Selection percentage: Defines the number of most fit individuals (in %) who will participate to the subsequent steps (genetic operators—crossover and mutation) in each generation.
- (3) Calculate the minimum graph distance matrix: Using the obtained data in the previous step (step 1), the algorithm performs the calculation of the graph minimum distance matrix, using a well-known Floyd–Warshall algorithm [39]. The choice of this algorithm is due to the good performance and simplicity of its implementation. The minimum distance matrix is (in which M is the graph dimension) and contains the minimum distances (in meters) among all graph nodes.
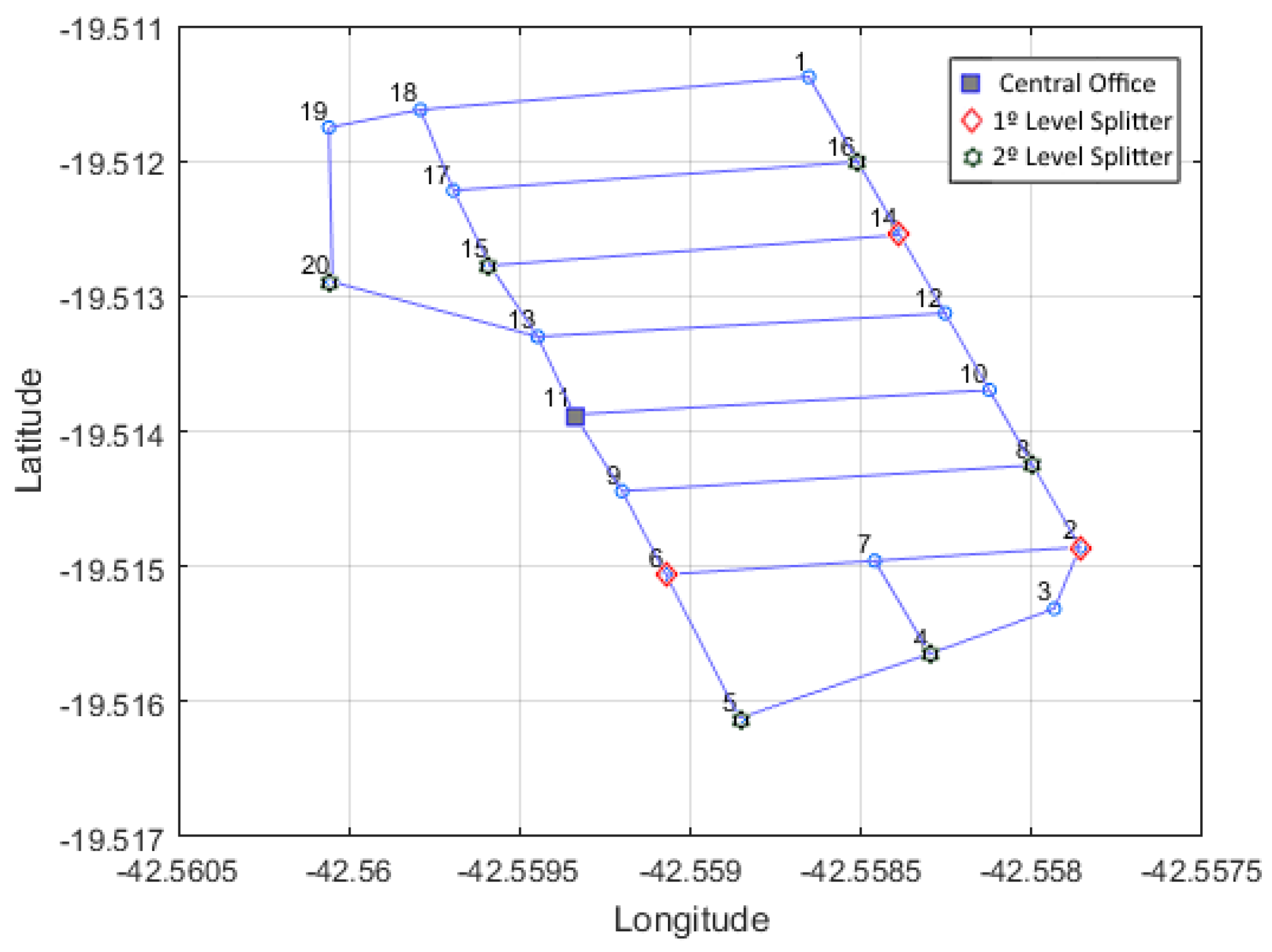
- (4) Generate the initial population randomly with P individuals: In this step, a set of P random individuals is generated, allowing a wide range of possible initial solutions. Each individual will be represented by a line in the population matrix. This matrix will be , in which P is the population size and M is the graph dimension. In addition, each gene (of the individuals) represents one possible node position for optical splitters in the network graph. Thus, each individual represents a possible solution to the problem. It is worth mentioning that topologies with two splitting stages will be represented with two population matrices (each one for each splitting level). The following matrices ( and ) represent a random initial population for an hypothetical scenario of a PON using two splitter stage. Figure 6 represents graphically the first individual of both matrices.
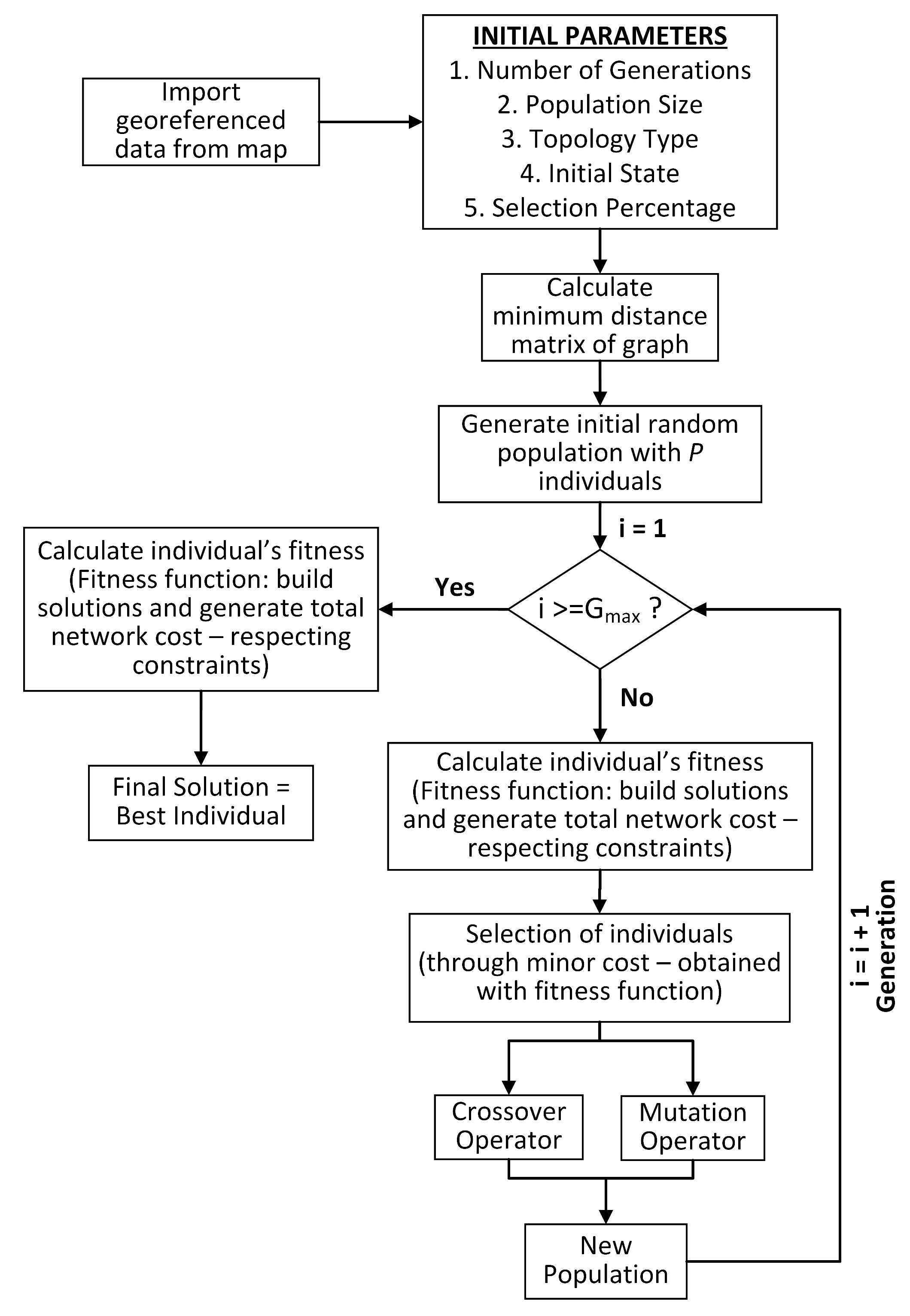
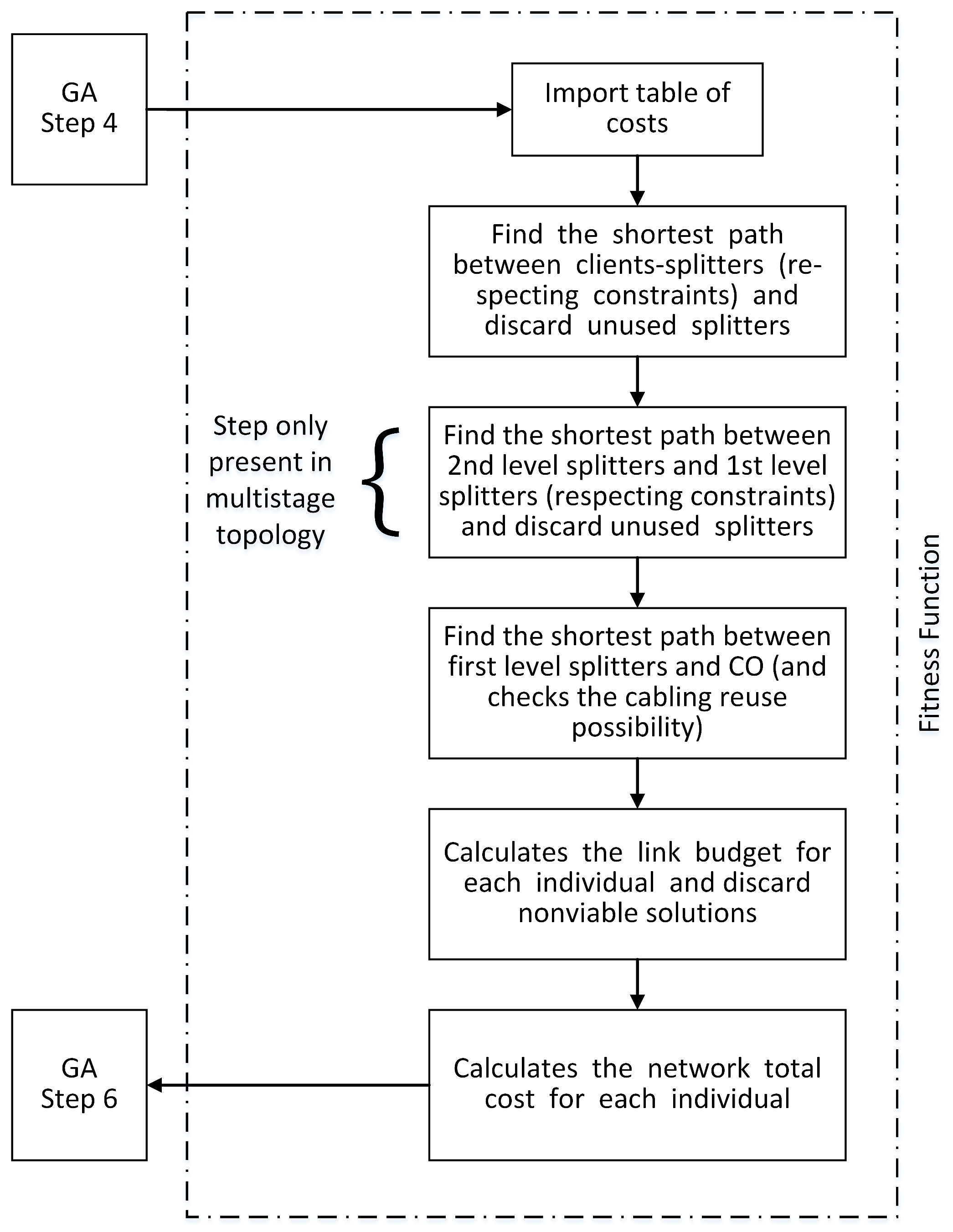
- (5) Calculate the individual cost (fitness function): With the individuals generated in the previous step (step 4), and the obtained information from the map, the network is set up for each individual and the total cost (for each individual) is calculated. The network total cost (in R$) is represented by the sum of all materials and services involved in the network deployment. Figure 7 shows the flowchart and the following steps describe in details the fitness function steps:() Import table of costs: First of all, the table of costs for PON deployment containing materials and installing service costs is imported. These costs were reported by a real ISP of Salvador city, Brazil;() Find the shortest path between subscribers–splitters (respecting constraints) and discard unused splitters: Using matrix operations, the algorithm finds the shortest path between all subscribers and splitters (respecting the following constraints: (1) the last mile connection will always use a drop cable and must respect the maximum limit of 400 m; (2) the number of subscribers served by an optical splitter cannot be greater than the number of available ports; (3) every subscriber must be connected to an optical splitter). Splitters that do not have assigned subscribers are discarded (gene value in the specific position of the matrix is set to 0). Individuals who do not meet the restrictions have their costs defined as infinite and, consequently, are discarded in the next generations;() Find the shortest path between 2nd level splitters and 1st level splitters (respecting constraints) and discard unused splitters: Similarly to step (), using matrix operations, the algorithm calculates the shortest path between all 2nd and 1st level splitters (if a multiple stage is adopted). Connections must respect the available ports of first level splitters. Empty splitters are discarded;() Find the shortest path between 1st level splitters and CO (and check the cabling reuse possibility): Again, using matrix operations, the algorithm calculates the shortest path between all 1st level splitters and CO. Based on the found minimum distances, the algorithm checks the possibility of creating a shared feeder cable route among 1st level splitters;() Calculate the link budget for each individual and discard non-viable solutions: In this step, the individual optical power budget is also calculated. For the calculus of optical attenuation, typical attenuation values defined on the ITU-T G.671 recommendation [40] were used, which characterizes optical components. To complement and to increase the accuracy of the calculation, we also adopted a vendor (Furukawa) real typical values of attenuation for passive (Table 3) and active network elements (Table 4). It is worth mentioning that, for optical link budget calculation, the lowest value of launched power was considered (worst case).In the proposed algorithm, the optical attenuation was calculated only for the 1310 nm wavelength (used for GPON upstream). This is due to the greater optical losses in this wavelength and, therefore, it can define the condition of the network functioning properly. The received power and total attenuation can be calculated for each optical link byandin which represents the received power (in dBm), the transmitted power (in dBm), the sum of link attenuation (in dB), the total loss of each optical connector (in dB), the total loss of each splice (in dB), the total loss of optical splitters (in dB), the fiber loss (in dB/km) for the wavelength and L the optical link length (in km). In this paper, we only considered power budget in our proposal. Crosstalk analysis between different wavelength channels and the impact of the transmission impairments (chromatic dispersion, laser phase noise, fiber nonlinearity and limitations due to Kerr nonlinearity) are part of proposals for future works;() Calculate the network total cost for each individual: using the imported cost table, the shortest distances already stored and knowing the positions of all optical splitters, the network cost (in R$) is calculated (for each individual).
- (6) Select the most fit individuals: In this step, individuals are organized in ascending order according to each value of total deployment cost obtained by using the fitness function (step 5). Part of the most fit individuals are copied and maintained (to guarantee not worse solutions). Then, the most fit individuals (best solutions) are selected and participate in the crossover and mutation procedures (step 7). The rest of the individuals are discarded (do not participate in next generations).
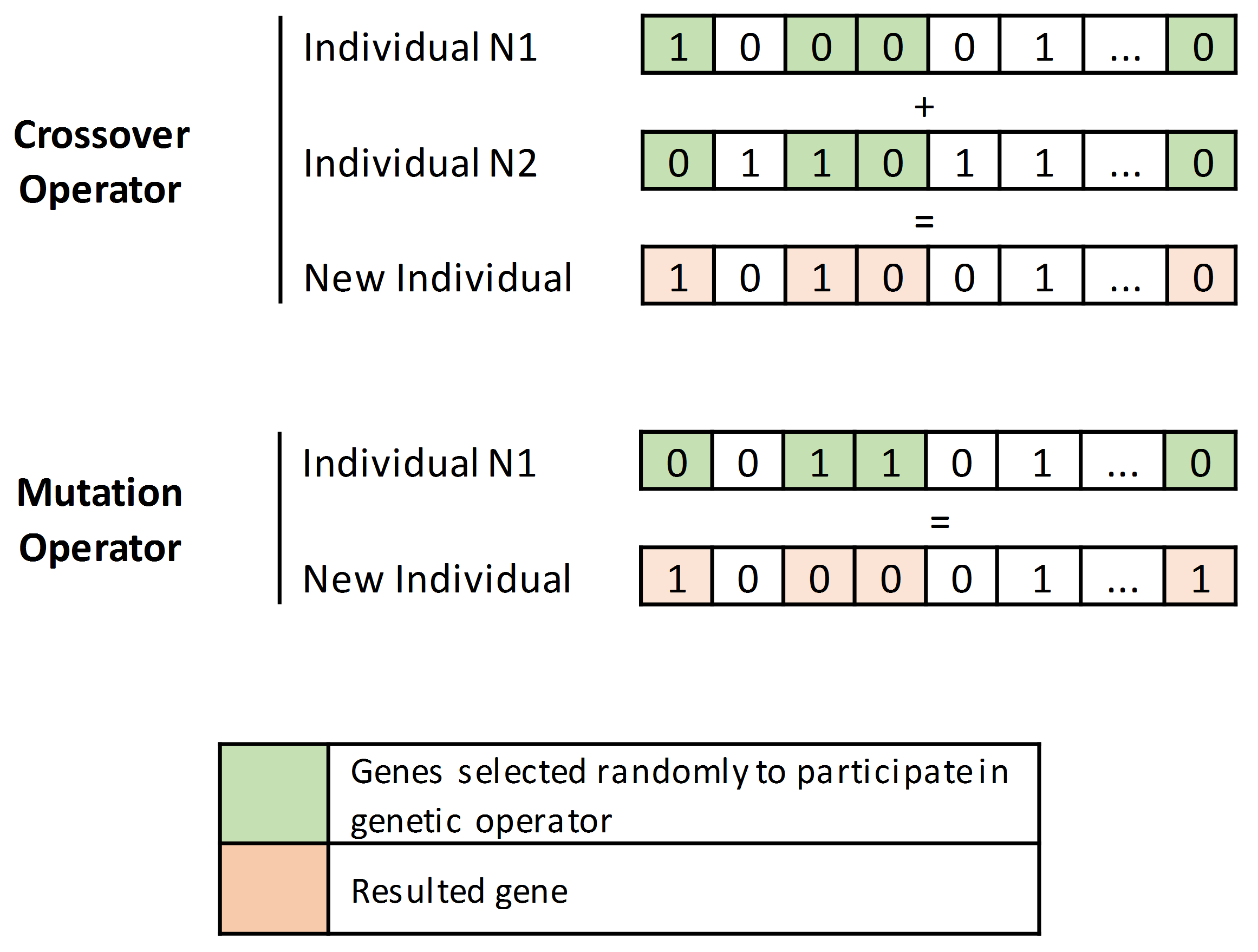
- (7) Crossover and mutation procedures: The genetic operators are applied to the selected individuals in the previous step (step 6). The crossover function randomly combines characteristics (genes) of two individuals (among those selected). In the crossover operation, genes not drawn will inherit the values of the first selected individual. The mutation function arbitrarily alters one or more characteristics (genes) of the selected individual. Figure 8 shows a graphical example of the crossover and mutation genetic operators applied to hypothetical individuals.For better results, an index-to-check and method to monitor the remaining number of generations have been developed. In this way, as the generations advance, the system reduces the probability of too many changes in the genes of the selected individuals (through genetic operators). This adjustment allows a greater chance of fine-tuning when individuals have an advanced generation index. It is worth mentioning that all probability parameters were set empirically.
- (8) New population: in this step, the new population is stored and is formed by: a part of the most fit individuals maintained in step (step 6)—for keeping the most fit individuals in case of worsening solutions—and new individuals emerged from the genetic operators such as crossover and mutation. With the new population, the algorithm performs G interactions (repeating the previous steps 1 to 7) until reach the predefined value for generations. When this value reaches , the algorithm recalculates the network cost for the last stored population and the best individual is considered as the final solution to the proposed problem.
5. Simulation Setup
6. Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Butt, R.A.; Faheem, M.; Ashraf, M.W. Efficient upstream bandwidth utilization with minimum bandwidth waste for time and wavelength division passive optical network. Opt. Quant. Electron. 2020, 52, 14. [Google Scholar] [CrossRef]
- Mat Sharif, K.A.; Ngah, N.A.; Ahmad, A.; Khairi, K.; Manaf, Z.A.; Tarsono, D. Demonstration of xgs-pon and gpon co-existing in the same passive optical network. In Proceedings of the IEEE 7th International Conference on Photonics (ICP), Langkawi, Malaysia, 9–11 April 2018. [Google Scholar] [CrossRef]
- Liu, X.; Effenberger, F. Emerging Optical Access Network Technologies for 5G Wireless [Invited]. J. Opt. Commun. Netw. 2016, 8, B70–B79. [Google Scholar] [CrossRef]
- Cisco Annual Internet Report (2018–2023). Available online: https://www.cisco.com/c/en/us/solutions/collateral/executive-perspectives/annual-internet-report/white-paper-c11-741490.html (accessed on 26 February 2022).
- Household Broadband Guide. Available online: https://www.fcc.gov/consumers/guides/household-broadband-guide (accessed on 26 February 2022).
- Fourie, H.; Bijl, P.W. Race to the top: Does competition in the DSL market matter for fibre penetration? Telecomm Policy 2018, 42, 778–793. [Google Scholar] [CrossRef]
- Prat, J. Next-Generation FTTH Passive Optical Networks; Springer: Dordrecht, The Netherlands, 2008. [Google Scholar] [CrossRef]
- Muciaccia, T.; Gargano, F.; Passaro, V.M.N. Passive Optical Access Networks: State of the Art and Future Evolution. Photonics 2014, 1, 323–346. [Google Scholar] [CrossRef]
- Fixed Broadband Access in Brazil. Available online: https://informacoes.anatel.gov.br/paineis/acessos/banda-larga-fixa (accessed on 26 February 2022).
- Chen, J.; Wosinska, L.; Mas Machuca, C.; Jaeger, M. Cost vs. reliability performance study of fiber access network architectures. IEEE Commun. Mag. 2010, 48, 56–65. [Google Scholar] [CrossRef]
- Lam, C.F. Passive Optical Networks: Principles and Practice; Academic Press: Burlington, VT, USA, 2007; pp. 1–324. [Google Scholar]
- Recommendation G.984.1: Gigabit-Capable Passive Optical Networks (GPON): General Characteristics. Available online: https://www.itu.int/rec/T-REC-G.984.1 (accessed on 26 February 2022).
- Recommendation G.9807.1: 10-Gigabit-Capable Symmetric Passive Optical Network (XGS-PON). Available online: https://www.itu.int/rec/T-REC-G.9807.1/en (accessed on 26 February 2022).
- Recommendation G.9804.1: Higher Speed Passive Optical Networks. Available online: https://www.itu.int/rec/T-REC-G.9804.1-201911-I/en (accessed on 26 February 2022).
- Poon, K.F.; Mortimore, D.B.; Mellis, J. Designing optimal FTTH and PON networks using new automatic methods. In Proceedings of the International Conference on Access Technologies, Cambridge, UK, 21–22 June 2006; pp. 45–48. [Google Scholar] [CrossRef]
- Arokkiam, J.A.; Alvarez, P.; Wu, X.; Brown, K.N.; Sreenan, C.J.; Ruffini, M.; Marchetti, N.; Doyle, L.; Payne, D. Design, implementation, and evaluation of an xg-pon module for the ns-3 network simulator. Simulation 2017, 93, 409–426. [Google Scholar] [CrossRef]
- Kokangul, A.; Ari, A. Optimization of passive optical network planning. Appl. Math. Modell. 2011, 35, 3345–3354. [Google Scholar] [CrossRef]
- Chu, A.; Poon, K.F.; Ouali, A. Using ant colony optimization to design GPON-FTTH networks with aggregating equipment. In Proceedings of the Symposium on Computational Intelligence for Communication Systems and Networks (CIComms), Singapore, 16–19 April 2013; pp. 10–17. [Google Scholar] [CrossRef]
- Ouali, A.; Poon, K.F.; Lee, B.; Romaithi, K.A. Towards achieving practical GPON FTTH designs. In Proceedings of the International Workshop on Computer Aided Modelling and Design of Communication Links and Networks (CAMAD), Guildford, UK, 7–9 September 2015; pp. 108–113. [Google Scholar] [CrossRef]
- Pehnelt, T.; Lafata, P. Optimizing of passive optical network deployment using algorithm with metrics. Adv. Electr. Electron. Eng. 2018, 15, 866–876. [Google Scholar] [CrossRef]
- Villalba, T.V.Y.; Rossi, S.M.; Mokarzel, M.P.; Salvador, M.R.; Neto, H.M.A.; Cesar, A.C.; Romero, M.A.; Rocha, M.D.L. Design of passive optical networks using genetic algorithm. In Proceedings of the SBMO/IEEE MTT-S International Microwave and Optoelectronics Conference (IMOC), Belem, Brazil, 3–6 November 2009; pp. 682–688. [Google Scholar] [CrossRef]
- Eira, A.; Pedro, J.; Pires, J. Optimized design of multistage passive optical networks. J. Opt. Commun. Netw. 2012, 4, 402–411. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, J.; Ji, Y.; Lee, Y. C-RoFN: Multi-stratum resources optimization for cloud-based radio over optical fiber networks. IEEE Commun. Mag. 2016, 54, 118–125. [Google Scholar] [CrossRef]
- Yang, H.; Yuan, J.; Li, C.; Zhao, G.; Sun, Z.; Yao, Q.; Bao, B.; Vasilakos, A.V.; Zhang, J. BrainIoT: Brain-like productive services provisioning with federated learning in industrial IoT. IEEE Internet Things J. 2021, 9, 2014–2024. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, J.; Zhao, Y.; Han, J.; Lin, Y.; Lee, Y. SUDOI: Software defined networking for ubiquitous data center optical interconnection. IEEE Commun. Mag. 2016, 54, 86–95. [Google Scholar] [CrossRef]
- Europe, F.C. FTTH Handbook, 8th ed.; FTTH Council Europe: Brussel, Belgium, 2018; Available online: https://www.c3comunicaciones.es/Documentacion/FTTH%20Handbook_2017_V8_FINAL.pdf (accessed on 26 February 2022).
- Arévalo, G.V.; Hincapié, R.C.; Gaudino, R. Optimization of multiple PON deployment costs and comparison between GPON, XGPON, NGPON2 and UDWDM PON. Opt. Switch. Net. 2017, 25, 80–90. [Google Scholar] [CrossRef] [Green Version]
- FTTH Architecture White Paper Series. Available online: https://www.commscope.com/globalassets/digizuite/2597-ftth-architectures-wp-110964-en.pdf?r=1 (accessed on 26 February 2022).
- Cavalcante, M.A.; Pereira, H.A.; Chaves, D.A.R.; Almeida, R.C. An auxiliary-graph-based methodology for regenerator assignment problem optimization in translucent elastic optical networks. Opt. Fiber Technol. 2019, 53, 102008. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic Algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Srinivas, M.; Patnaik, L.M. Genetic algorithms: A survey. IEEE Comput. 1994, 27, 17–26. [Google Scholar] [CrossRef]
- Sivanandam, S.N.; Deepa, S.N. Genetic Algorithm Optimization Problems; Introduction to Genetic Algorithms; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Moza, M.; Kumar, S. Routing in networks using genetic algorithm. Int. J. Commun. Net. Dist. Syst. 2018, 20, 291–311. [Google Scholar] [CrossRef]
- Moza, M.; Kumar, S. Network routing protocol using genetic algorithms. Int. J. Electr. Comput. Sci. 2010, 10, 36–40. [Google Scholar]
- Leung, Y.; Li, G.; Xu, Z.B. A genetic algorithm for the multiple destination routing problems. IEEE Trans. Evol. Comput. 1998, 2, 150–161. [Google Scholar] [CrossRef]
- Sun, B.; Li, L. A QoS multicast routing optimization algorithm based on genetic algorithm. J. Commun. Netw. 2006, 8, 116–122. [Google Scholar] [CrossRef]
- Beckmann, D.; Killat, U. Routing and wavelength assignment in optical networks using genetic algorithms. Eur. Trans. Telecom. 1999, 10, 537–544. [Google Scholar] [CrossRef]
- Rani, K.S.K.; Deepa, S.N. Hybrid evolutionary computing algorithms and statistical methods based optimal fragmentation in smart cloud networks. Cluster Comput 2019, 22, 241–254. [Google Scholar] [CrossRef]
- Floyd, R.W. Algorithm 97: Shortest path. Comm. ACM 1962, 5, 318–328. [Google Scholar] [CrossRef]
- G.671: Transmission Characteristics of Optical Components and Subsystems. Available online: https://www.itu.int/rec/T-REC-G.671/en (accessed on 26 February 2022).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | [18] | [20] | [21] | [22] | Our Proposal |
|---|---|---|---|---|---|
| Approach | ACO | Dijkstra and k-means | GA | ILP and | GA |
| Georeferenced real maps | – | X | – | – | X |
| Number of splitters possible positions (worst available case) | 5 | N/A | N/A | 50 | 714 |
| Number of ONUs (worst available case) | 1033 | 40 | 120 | 1000 | 1544 |
| Multistage network | X | X | X | X | X |
| Maximum split ratio (per PON) | N/A | 64 | 128 | 64 | 64 |
| Elapsed time (min) (for worst available case) | 4.06 | N/A | N/A | N/A | 72.27 |
| Topology | Topology Type Approach | Number of Splitter Stages | Adopted Split Ratio | Splitter’s Placement |
|---|---|---|---|---|
| CTT1 | Centralized | 1 | 1 × 64 | OSP |
| CTT2 | Centralized | 2 | 1 × 2 and 1 × 32 | CO and OSP |
| DTT1 | Distributed | 2 | 1 × 4 and 1 × 16 | OSP |
| DTT2 | Distributed | 2 | 1 × 8 and 1 × 8 | OSP |
| Component | Typical Loss | Reference or Part-Number |
|---|---|---|
| Drop Cable (02F) | 0.37 dB/km (for 1310 nm) | 17042026 |
| Distribution Cable (12F) | 17045113 | |
| Feeder Cable (48F) | 17040049 | |
| Optical Splitter 1 × 2 | 3.7 dB | 35500123 |
| Optical Splitter 1 × 4 | 7.1 dB | 35505000 |
| Optical Splitter 1 × 8 | 10.5 dB | 35505001 |
| Optical Splitter 1 × 16 | 13.7 dB | 35505002 |
| Optical Splitter 1 × 32 | 17.1 dB | 35505003 |
| Optical Splitter 1 × 64 | 20.5 dB | 35505047 |
| Aligned fusion splice | 0.08 dB | ITU-T G.671 |
| Mechanical splice | 0.15 dB | ITU-T G.671 |
| Optical Connector | 0.3 dB | ITU-T G.671 |
| Component | Average Launch Power | Receiver Optical Overload | Receiver Sensitivity | Reference Part-Number |
|---|---|---|---|---|
| OLT (SFP CLASSE B+) | 1.5 to 5 dBm | −8 dBm | −28 dBm | 35510197 |
| ONT (ONT FK-G421W) | 0.5 to 5 dBm | −8 dBm | −27 dBm | 35510133 |
| ITU-T G.984 (GPON) [12] | ADOPTED GPON SYSTEM | |
|---|---|---|
| Downstream Rate | 2.5 Gbps | 2.5 Gbps |
| Upstream Rate | 1.25 or 2.5 Gbps | 1.25 Gbps |
| Downstream Wavelength | 1490 nm | 1490 nm |
| Upstream Wavelength | 1310 nm | 1310 nm |
| Broadcast RF Video Wavelength | 1510 nm | - |
| Physical Reach | 10 or 20 km | 20 km |
| Split ratio | 1:32, 1:64, (1:128 planned) | 1:64 |
| Network Characteristics | Region I | Region II | ||
|---|---|---|---|---|
| Values (NDS) | Values (DS) | Values (NDS) | Values (DS) | |
| Initial population (individuals) | 125 | 125 | 125 | 125 |
| Number of generations (iterations) | 750 | 750 | 1000 | 1000 |
| Selection percentage (%) | 40 | 40 | 40 | 40 |
| Reserve for future subscribers (%) | ||||
| Number of nodes | 314 | 314 | 714 | 714 |
| Total number of attended subscribers | 164 | 820 | 436 | 1544 |
| Nodes with 2 subscribers (green color) | 52 | 11 | 151 | 6 |
| Nodes with 4 subscribers (yellow color) | 8 | 35 | 21 | 19 |
| Nodes with 7 subscribers (red color) | 4 | 94 | 6 | 208 |
| Map area (km) | ||||
| subscribers/km | 88 | 443 | 76 | |
| Item | Region I (NDS) | Region I (DS) | ||||||
|---|---|---|---|---|---|---|---|---|
| CTT1 | CTT2 | DTT1 | DTT2 | CTT1 | CTT2 | DTT1 | DTT2 | |
| Execution time (min) | 25.14 | 31.52 | 27.13 | 33.62 | 19.21 | 35.12 | 27.14 | 29.02 |
| 2F cable (drop cable) (km) | 26.98 | 26.46 | 21.65 | 12.78 | 78.09 | 60.99 | 48.67 | 40.35 |
| 12F cable (distribution cable) (km) | - | - | 6.78 | 11.09 | - | - | 12.22 | 22.65 |
| 48F cable (feeder cable) (km) | 6.58 | 6.64 | 2.05 | 2.99 | 9.83 | 11.57 | 7.31 | 7.16 |
| Total used optical cables (km) | 33.56 | 33.10 | 30.49 | 26.86 | 87.92 | 72.56 | 68.19 | 70.16 |
| Total used 1st level splitters (unit) | 16 | 8 | 8 | 8 | 32 | 24 | 28 | 24 |
| Total used 2nd level splitters (unit) | - | 16 | 21 | 38 | - | 47 | 86 | 138 |
| Total used FOSC (unit) | 16 | 16 | 7 | 8 | 32 | 47 | 22 | 22 |
| Total used PON ports (unit) | 16 | 8 | 8 | 8 | 32 | 24 | 28 | 24 |
| Network total cost (R$) | 430,122.38 | 406,639.48 | 371,720.02 | 385,718.94 | 1,294,399.87 | 1,261,623.09 | 1,259,180.97 | 1,312,597,11 |
| Increased cost (%) | 13.58 | 8.59 | - | 3.63 | 2.72 | 0.19 | - | 4.06 |
| Item | Region II (NDS) | Region II (DS) | ||||||
|---|---|---|---|---|---|---|---|---|
| CTT1 | CTT2 | DTT1 | DTT2 | CTT1 | CTT2 | DTT1 | DTT2 | |
| Execution time (min) | 63.35 | 61.08 | 64.17 | 63.55 | 76.58 | 70.05 | 66.73 | 72.27 |
| 2F cable (drop cable) (km) | 79.93 | 63.83 | 54.15 | 27.82 | 141.20 | 114.68 | 84.78 | 73.03 |
| 12F cable (distribution cable) (km) | - | - | 19.66 | 29.07 | - | - | 23.32 | 42.17 |
| 48F cable (feeder cable) (km) | 13.95 | 16.16 | 6.69 | 11.09 | 17.73 | 19.64 | 14.16 | 13.01 |
| Total used optical cables (km) | 93.88 | 79.99 | 80.50 | 67.98 | 158.93 | 134.31 | 122.26 | 128.21 |
| Total used 1st level splitters (unit) | 32 | 20 | 16 | 24 | 59 | 44 | 51 | 39 |
| Total used 2nd level splitters (unit) | - | 40 | 54 | 115 | - | 87 | 161 | 233 |
| Total used FOSC (unit) | 32 | 40 | 13 | 24 | 59 | 87 | 43 | 36 |
| Total used PON ports (unit) | 32 | 20 | 16 | 24 | 59 | 44 | 51 | 39 |
| Network total cost (R$) | 1,005,588.35 | 945,542.69 | 889,545.10 | 971,691.88 | 2,394,071.30 | 2,237,337.33 | 2,329,664.76 | 2,343,312.70 |
| Increased cost (%) | 11.54 | 5.92 | - | 8.45 | 2.69 | 0.32 | - | 0.66 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dias, L.P.; Dos Santos, A.F.; Pereira, H.A.; De Andrade Almeida, R.C., Jr.; Giozza, W.F.; De Sousa, R.T., Jr.; Assis, K.D.R. Evolutionary Strategy for Practical Design of Passive Optical Networks. Photonics 2022, 9, 278. https://doi.org/10.3390/photonics9050278
Dias LP, Dos Santos AF, Pereira HA, De Andrade Almeida RC Jr., Giozza WF, De Sousa RT Jr., Assis KDR. Evolutionary Strategy for Practical Design of Passive Optical Networks. Photonics. 2022; 9(5):278. https://doi.org/10.3390/photonics9050278
Chicago/Turabian StyleDias, Leonardo Pereira, Alex Ferreira Dos Santos, Helder Alves Pereira, Raul Camelo De Andrade Almeida, Jr., William Ferreira Giozza, Rafael Timóteo De Sousa, Jr., and Karcius Day Rosario Assis. 2022. "Evolutionary Strategy for Practical Design of Passive Optical Networks" Photonics 9, no. 5: 278. https://doi.org/10.3390/photonics9050278
APA StyleDias, L. P., Dos Santos, A. F., Pereira, H. A., De Andrade Almeida, R. C., Jr., Giozza, W. F., De Sousa, R. T., Jr., & Assis, K. D. R. (2022). Evolutionary Strategy for Practical Design of Passive Optical Networks. Photonics, 9(5), 278. https://doi.org/10.3390/photonics9050278