
Closed-Loop Supply Chain Network Design under Uncertainties Using Fuzzy Decision Making


Abstract
:1. Introduction
- We proposed a novel multi-objective CLSCN model to minimize overall system costs and negative environmental impact. To the best of authors’ knowledge, fuzzy programming has not been applied to CLSCN problems with system cost and environmental impact objectives.
- We found most related studies in the literature only considered 1 or 2 uncertain parameters. In this paper, we studied multiple uncertain parameters such as demand, return, scrap rate, processing costs and environmental impact.
- A comprehensive parameter sensitivity analysis of the fuzzy model is conducted.
2. Literature Review
3. Problem Definition and Formulation
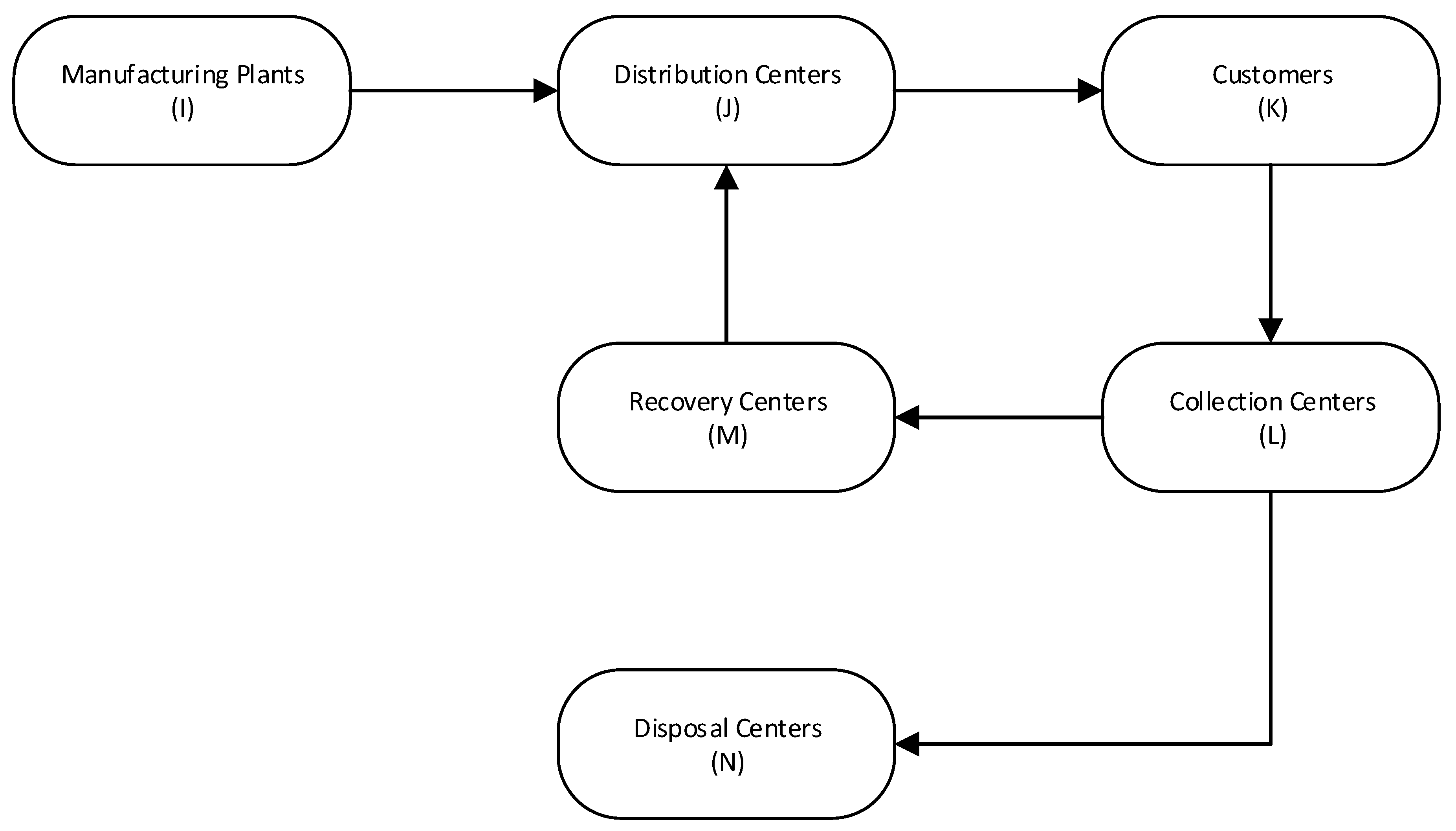
3.1. Problem Statement
3.2. Model Formulation
- i
- set of potential locations for manufacturing plants
- j
- set of potential locations for distribution centers
- k
- set of fixed locations of customers
- l
- set of potential locations for collection centers
- m
- set of potential locations for recovery centers
- n
- set of potential locations for disposal centers
- t
- set of time periods
- demand volume of customer k in time period t
- percentage of return from customer k in time period t
- mean scrap rate in time period t
- fixed cost of building manufacturing plant i
- fixed cost of building distribution center j
- fixed cost of building collection center l
- fixed cost of building disposal center n
- fixed cost of building recovery center m
- unit product shipping cost from manufacturing plant i to distribution center j
- unit product shipping cost from distribution center j to customer k
- unit product shipping cost from customer k to collection center l
- unit product shipping cost from collection center l to recovery center m
- unit product shipping cost from collection center l to disposal center n
- unit product shipping cost from recovery center m to distribution center j
- unit production cost at manufacturing plant i
- unit processing cost at distribution center j
- unit processing cost at collection center l
- unit reproduction cost at recovery center m
- maximum capacity of manufacturing plant i in each time period
- maximum capacity of distribution center j in each time period
- maximum capacity of collection center l in each time period
- maximum capacity of recovery center m in each time period
- maximum capacity of disposal center n in each time period
- negative environmental impact factor for opening a manufacturing plant at location i
- negative environmental impact factor for opening a distribution center at location j
- negative environmental impact factor for opening a collection center at location l
- negative environmental impact factor for opening a recovery center at location m
- negative environmental impact factor for opening a disposal center at location n
- volume of products transported from manufacturing plant i to distribution center j in time period t
- volume of products transported from distribution center j to customer k in time period t
- volume of returned items transported from customer k to collection center l in time period t
- volume of recoverable items transported from collection center l to recovery center m in time period t
- volume of scrapped items transported from collection center l to disposal center n in time period t
- volume of recovered items transported from recovery center m to distribution center j in time period t
- 1 if a manufacturing plant is built at location i and 0 otherwise
- 1 if a distribution center is built at location j and 0 otherwise
- 1 if a collection center is built at location l and 0 otherwise
- 1 if a recovery center is built at location m and 0 otherwise
- 1 if a disposal center is built at location n and 0 otherwise
3.2.1. Objective Functions
3.2.2. Constraints
4. The Proposed Solution Method
4.1. The Equivalent Auxiliary Crisp Model
4.2. The Fuzzy Solution Approach
5. Computational Experiments
5.1. Sensitivity Analysis on
5.2. Sensitivity Analysis on and
5.3. Sensitivity Analysis on
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Klibi, W.; Martel, A.; Guitouni, A. The design of robust value-creating supply chain networks: A critical review. Eur. J. Oper. Res. 2010, 203, 283–293. [Google Scholar] [CrossRef]
- Pishvaee, M.S.; Rabbani, M.; Torabi, S.A. A robust optimization approach to closed-loop supply chain network design under uncertainty. Appl. Math. Model. 2011, 35, 637–649. [Google Scholar] [CrossRef]
- Hu, Z.; Hu, G. A two-stage stochastic programming model for lot-sizing and scheduling under uncertainty. Int. J. Prod. Econ. 2016, 180, 198–207. [Google Scholar] [CrossRef]
- Hu, Z.; Hu, G. A multi-stage stochastic programming for lot-sizing and scheduling under demand uncertainty. Comput. Ind. Eng. 2018, 119, 157–166. [Google Scholar] [CrossRef]
- Ramaraj, G.; Hu, Z.; Hu, G. A two-stage stochastic programming model for production lot-sizing and scheduling under demand and raw material quality uncertainties. Int. J. Plan. Sched. 2019, 3, 1–27. [Google Scholar] [CrossRef]
- Bertsimas, D.; Thiele, A. Robust and data-driven optimization: Modern decision making under uncertainty. In Models, Methods, and Applications for Innovative Decision Making; INFORMS: Catonsville, MD, USA, 2006; pp. 95–122. [Google Scholar]
- Gülpınar, N.; Pachamanova, D.; Çanakoğlu, E. Robust strategies for facility location under uncertainty. Eur. J. Oper. Res. 2013, 225, 21–35. [Google Scholar] [CrossRef]
- Akçalı, E.; Çetinkaya, S.; Üster, H. Network design for reverse and closed-loop supply chains: An annotated bibliography of models and solution approaches. Networks 2009, 53, 231–248. [Google Scholar] [CrossRef]
- Alem, D.J.; Morabito, R. Production planning in furniture settings via robust optimization. Comput. Oper. Res. 2012, 39, 139–150. [Google Scholar] [CrossRef]
- Hasani, A.; Zegordi, S.H.; Nikbakhsh, E. Robust closed-loop supply chain network design for perishable goods in agile manufacturing under uncertainty. Int. J. Prod. Res. 2012, 50, 4649–4669. [Google Scholar] [CrossRef]
- Hu, Z.; Hu, G. Hybrid stochastic and robust optimization model for lot-sizing and scheduling problems under uncertainties. Eur. J. Oper. Res. 2020, 2, 284. [Google Scholar] [CrossRef]
- Keyvanshokooh, E.; Ryan, S.M.; Kabir, E. Hybrid robust and stochastic optimization for closed-loop supply chain network design using accelerated Benders decomposition. Eur. J. Oper. Res. 2016, 249, 76–92. [Google Scholar] [CrossRef] [Green Version]
- Mirzapour Al-E-Hashem, S.; Malekly, H.; Aryanezhad, M. A multi-objective robust optimization model for multi-product multi-site aggregate production planning in a supply chain under uncertainty. Int. J. Prod. Econ. 2011, 134, 28–42. [Google Scholar] [CrossRef]
- Prajogo, D.; Olhager, J. Supply chain integration and performance: The effects of long-term relationships, information technology and sharing, and logistics integration. Int. J. Prod. Econ. 2012, 135, 514–522. [Google Scholar] [CrossRef]
- Peng, H.; Shen, N.; Liao, H.; Xue, H.; Wang, Q. Uncertainty factors, methods, and solutions of closed-loop supply chain—A review for current situation and future prospects. J. Clean. Prod. 2020, 254, 120032. [Google Scholar] [CrossRef]
- Guan, G.; Jiang, Z.; Gong, Y.; Huang, Z.; Jamalnia, A. A Bibliometric Review of Two Decades’ Research on Closed-Loop Supply Chain: 2001–2020. IEEE Access 2021, 9, 3679–3695. [Google Scholar] [CrossRef]
- Pishvaee, M.S.; Torabi, S.A. A possibilistic programming approach for closed-loop supply chain network design under uncertainty. Fuzzy Sets Syst. 2010, 161, 2668–2683. [Google Scholar] [CrossRef]
- Zarandi, M.H.F.; Sisakht, A.H.; Davari, S. Design of a closed-loop supply chain (CLSC) model using an interactive fuzzy goal programming. Int. J. Adv. Manuf. Technol. 2011, 56, 809–821. [Google Scholar] [CrossRef]
- Jindal, A.; Sangwan, K.S. Closed loop supply chain network design and optimisation using fuzzy mixed integer linear programming model. Int. J. Prod. Res. 2014, 52, 4156–4173. [Google Scholar] [CrossRef]
- Kumar, N.R.; Kumar, R.S. Closed loop supply chain management and reverse logistics-A literature review. Int. J. Eng. Res. Technol. 2013, 6, 455–468. [Google Scholar]
- Amin, S.H.; Zhang, G. A multi-objective facility location model for closed-loop supply chain network under uncertain demand and return. Appl. Math. Model. 2013, 37, 4165–4176. [Google Scholar] [CrossRef]
- Shekarian, E.; Flapper, S.D. Analyzing the Structure of Closed-Loop Supply Chains: A Game Theory Perspective. Sustainability 2021, 13, 1397. [Google Scholar] [CrossRef]
- Shekarian, E. A review of factors affecting closed-loop supply chain models. J. Clean. Prod. 2020, 253, 119823. [Google Scholar] [CrossRef]
- Böhringer, C.; Rutherford, T.F.; Tol, R.S. The EU 20/20/2020 targets: An overview of the EMF22 assessment. Energy Econ. 2009, 31, S268–S273. [Google Scholar] [CrossRef] [Green Version]
- Haddadsisakht, A.; Ryan, S.M. Closed-loop supply chain network design with multiple transportation modes under stochastic demand and uncertain carbon tax. Int. J. Prod. Econ. 2018, 195, 118–131. [Google Scholar] [CrossRef] [Green Version]
- Liang, T.F. Distribution planning decisions using interactive fuzzy multi-objective linear programming. Fuzzy Sets Syst. 2006, 157, 1303–1316. [Google Scholar] [CrossRef]
- Inuiguchi, M.; Ramık, J. Possibilistic linear programming: A brief review of fuzzy mathematical programming and a comparison with stochastic programming in portfolio selection problem. Fuzzy Sets Syst. 2000, 111, 3–28. [Google Scholar] [CrossRef]
- Jiménez, M.; Arenas, M.; Bilbao, A.; Rodríguez, M.V. Linear programming with fuzzy parameters: An interactive method resolution. Eur. J. Oper. Res. 2007, 177, 1599–1609. [Google Scholar] [CrossRef]
- Wang, R.C.; Liang, T.F. Applying possibilistic linear programming to aggregate production planning. Int. J. Prod. Econ. 2005, 98, 328–341. [Google Scholar] [CrossRef]
- Rommelfanger, H.; Słowiński, R. Fuzzy linear programming with single or multiple objective functions. In Fuzzy Sets in Decision Analysis, Operations Research and Statistics; Springer: Berlin/Heidelberg, Germany, 1998; pp. 179–213. [Google Scholar]
- Sakawa, M. Fuzzy Sets and Interactive Multi-objective Optimization; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Fortemps, P.; Roubens, M. Ranking and defuzzification methods based on area compensation. Fuzzy Sets Syst. 1996, 82, 319–330. [Google Scholar] [CrossRef]
- González, A. A study of the ranking function approach through mean values. Fuzzy Sets Syst. 1990, 35, 29–41. [Google Scholar] [CrossRef]
- Parra, M.A.; Terol, A.B.; Gladish, B.P.; Urıa, M.R. Solving a multiobjective possibilistic problem through compromise programming. Eur. J. Oper. Res. 2005, 164, 748–759. [Google Scholar] [CrossRef]
- Zimmermann, H.J. Fuzzy programming and linear programming with several objective functions. Fuzzy Sets Syst. 1978, 1, 45–55. [Google Scholar] [CrossRef]
- Lai, Y.J.; Hwang, C.L. Possibilistic linear programming for managing interest rate risk. Fuzzy Sets Syst. 1993, 54, 135–146. [Google Scholar] [CrossRef]
- Li, X.q.; Zhang, B.; Li, H. Computing efficient solutions to fuzzy multiple objective linear programming problems. Fuzzy Sets Syst. 2006, 157, 1328–1332. [Google Scholar] [CrossRef]
- Tiwari, R.; Dharmar, S.; Rao, J. Fuzzy goal programming: An additive model. Fuzzy Sets Syst. 1987, 24, 27–34. [Google Scholar] [CrossRef]
- Torabi, S.A.; Hassini, E. An interactive possibilistic programming approach for multiple objective supply chain master planning. Fuzzy Sets Syst. 2008, 159, 193–214. [Google Scholar] [CrossRef]
- Fahimnia, B.; Sarkis, J.; Dehghanian, F.; Banihashemi, N.; Rahman, S. The impact of carbon pricing on a closed-loop supply chain: An Australian case study. J. Clean. Prod. 2013, 59, 210–225. [Google Scholar] [CrossRef]
- Krikke, H.; Bloemhof-Ruwaard, J.; Van Wassenhove, L.N. Concurrent product and closed-loop supply chain design with an application to refrigerators. Int. J. Prod. Res. 2003, 41, 3689–3719. [Google Scholar] [CrossRef]
- Selim, H.; Ozkarahan, I. A supply chain distribution network design model: An interactive fuzzy goal programming-based solution approach. Int. J. Adv. Manuf. Technol. 2008, 36, 401–418. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| ($) | ($) | (tons) | (tons) | |
|---|---|---|---|---|
| 0.1 | 1,400,372 | 1,690,324 | 1700 | 2400 |
| 0.2 | 1,451,849 | 1,691,516 | 1700 | 2300 |
| 0.3 | 1,483,329 | 1,692,709 | 1700 | 2200 |
| 0.4 | 1,534,811 | 1,693,903 | 1700 | 2100 |
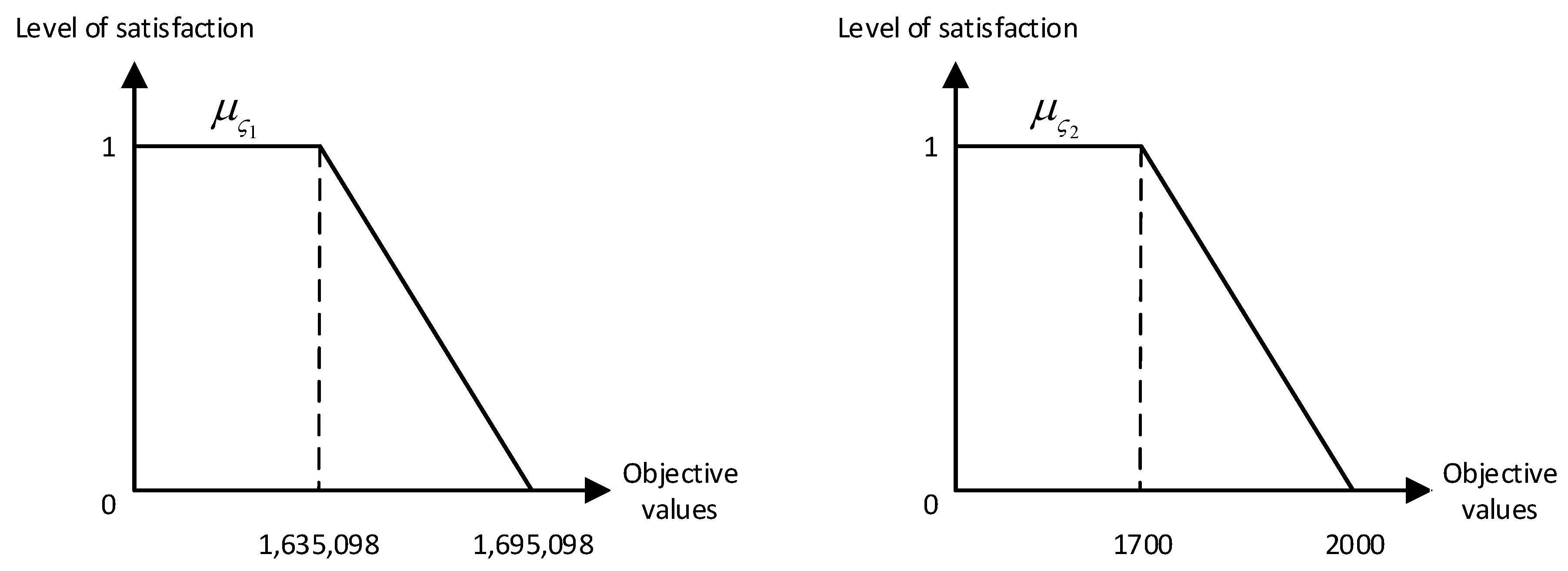
| 0.5 | 1,635,098 | 1,695,098 | 1700 | 2000 |
| 0.6 | 1,656,294 | 1,696,362 | 1700 | 1900 |
| 0.7 | 1,907,492 | 2,047,492 | 2200 | 2600 |
| 0.8 | 1,908,691 | 2,048,691 | 2200 | 2600 |
| 0.9 | 2,069,891 | 2,259,891 | 2500 | 3100 |
| ($) | (tons) | ||||
|---|---|---|---|---|---|
| 2,069,891 | 3100 | 1 | 0 | 0 | |
| 2,069,891 | 3100 | 1 | 0 | 0 | |
| 2,109,891 | 2900 | 0.789 | 1/3 | 1/3 | |
| 2,139,891 | 2800 | 0.632 | 0.5 | 0.5 | |
| 2,139,891 | 2800 | 0.632 | 0.5 | 0.5 | |
| 2,139,891 | 2800 | 0.632 | 0.5 | 0.5 | |
| 2,159,891 | 2700 | 0.526 | 2/3 | 0.526 | |
| 2,159,891 | 2700 | 0.526 | 2/3 | 0.526 | |
| 2,159,891 | 2700 | 0.526 | 2/3 | 0.526 |
| ($) | (tons) | ||||
|---|---|---|---|---|---|
| , | 1,675,098 | 1800 | 1/3 | 2/3 | 1/3 |
| , | 1,675,098 | 1800 | 1/3 | 2/3 | 1/3 |
| , | 1,675,098 | 1800 | 1/3 | 2/3 | 1/3 |
| , | 1,675,098 | 1800 | 1/3 | 2/3 | 1/3 |
| , | 1,655,098 | 1900 | 2/3 | 1/3 | 1/3 |
| , | 1,655,098 | 1900 | 2/3 | 1/3 | 1/3 |
| , | 1,655,098 | 1900 | 2/3 | 1/3 | 1/3 |
| , | 1,655,098 | 1900 | 2/3 | 1/3 | 1/3 |
| , | 1,635,098 | 2000 | 1 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Z.; Parwani, V.; Hu, G. Closed-Loop Supply Chain Network Design under Uncertainties Using Fuzzy Decision Making. Logistics 2021, 5, 15. https://doi.org/10.3390/logistics5010015
Hu Z, Parwani V, Hu G. Closed-Loop Supply Chain Network Design under Uncertainties Using Fuzzy Decision Making. Logistics. 2021; 5(1):15. https://doi.org/10.3390/logistics5010015
Chicago/Turabian StyleHu, Zhengyang, Viren Parwani, and Guiping Hu. 2021. "Closed-Loop Supply Chain Network Design under Uncertainties Using Fuzzy Decision Making" Logistics 5, no. 1: 15. https://doi.org/10.3390/logistics5010015
APA StyleHu, Z., Parwani, V., & Hu, G. (2021). Closed-Loop Supply Chain Network Design under Uncertainties Using Fuzzy Decision Making. Logistics, 5(1), 15. https://doi.org/10.3390/logistics5010015