1. Introduction
Weather attribution is the determination of the relative likelihood or probability of a weather event occurring under two different climate descriptions. It has been used to analyze changes in likelihood, relative to undisturbed early 20th century conditions, for an observed drought or precipitation event under present-day human-induced climate change conditions [
1]. A specific drought or storm event is an example of weather, which comprises daily atmospheric events. Weather describes short-term atmospheric events that occur over minutes to weeks [
2]. Climate describes the weather of a place averaged over an interval of a couple of decades or longer [
3].
Water budget or balance models are widely used in hydrology and water resources applications. They have been implemented to estimate a range of water resources considerations, including irrigation demand, soil moisture stresses, predicting stream flows, and assessing the hydrologic effects of climate change and changes in vegetation cover [
4,
5]. Water budget models generally utilize hourly to monthly weather forcing as the external driving force in their calculations [
4,
5,
6,
7].
Observations of future weather are unavailable. When future water budget projections are made using a water balance model, future weather is provided as input forcing. Stochastic or random realizations of future weather sampled from a physical process-based climate representation can provide future weather forcing to a water balance model. A collection of sampled realizations from a climate scenario representation is an ensemble. Global climate model (GCM) simulation results have been used to generate future weather ensembles for input to water balance models. GCMs are coupled atmosphere–ocean, general circulation models that simulate global weather with a sub-daily time step. GCMs simulate stochastic future weather to generate a physics- and process-based description of future climate [
7,
8].
Another option for the creation of stochastic realizations of future weather is a stochastic weather generator (WG) [
7,
8]. A WG is a statistical model of daily weather sequences that is designed to simulate or represent key statistical properties of observed meteorological records, like means, variances, frequencies, and extreme occurrences. When used in Monte Carlo simulations to generate many stochastic realizations of day-to-day weather, a WG is essentially a random number generator whose time-aggregated outputs statistically describe climate [
9].
WGs that statistically reproduce a future climate description obtained from GCM simulation results have been previously used to attribute hydrologic changes to global climate change, e.g., Refs. [
7,
8,
10,
11,
12,
13,
14,
15]. This study employs the unique approach of calibrating or training a WG to reproduce drought likelihood and drought magnitude from an attribution study. The calibrated WG provides a means to incorporate weather attribution into future water budget projections. The attribution-constrained future climate is compared to the projected climate from GCM simulation results and the historically observed climate. It indicates an increased likelihood for droughts of historically severe magnitudes relative to those projected by GCM simulations.
4. Discussion
CMIP6 simulations offer stochastic, day-to-day weather that is derived from a robust physical representation of future climate, based on idealized initial conditions and forcing scenarios. CMIP6 models represent the physics and physical processes in the atmospheric system. From the viewpoint of stochastic simulation, CMIP6 results provide stochastic day-to-day weather, sampled from the governing or underlying “climate” process, as well as a physics-based description of the “climate” process and its functions under varying initial and forcing conditions.
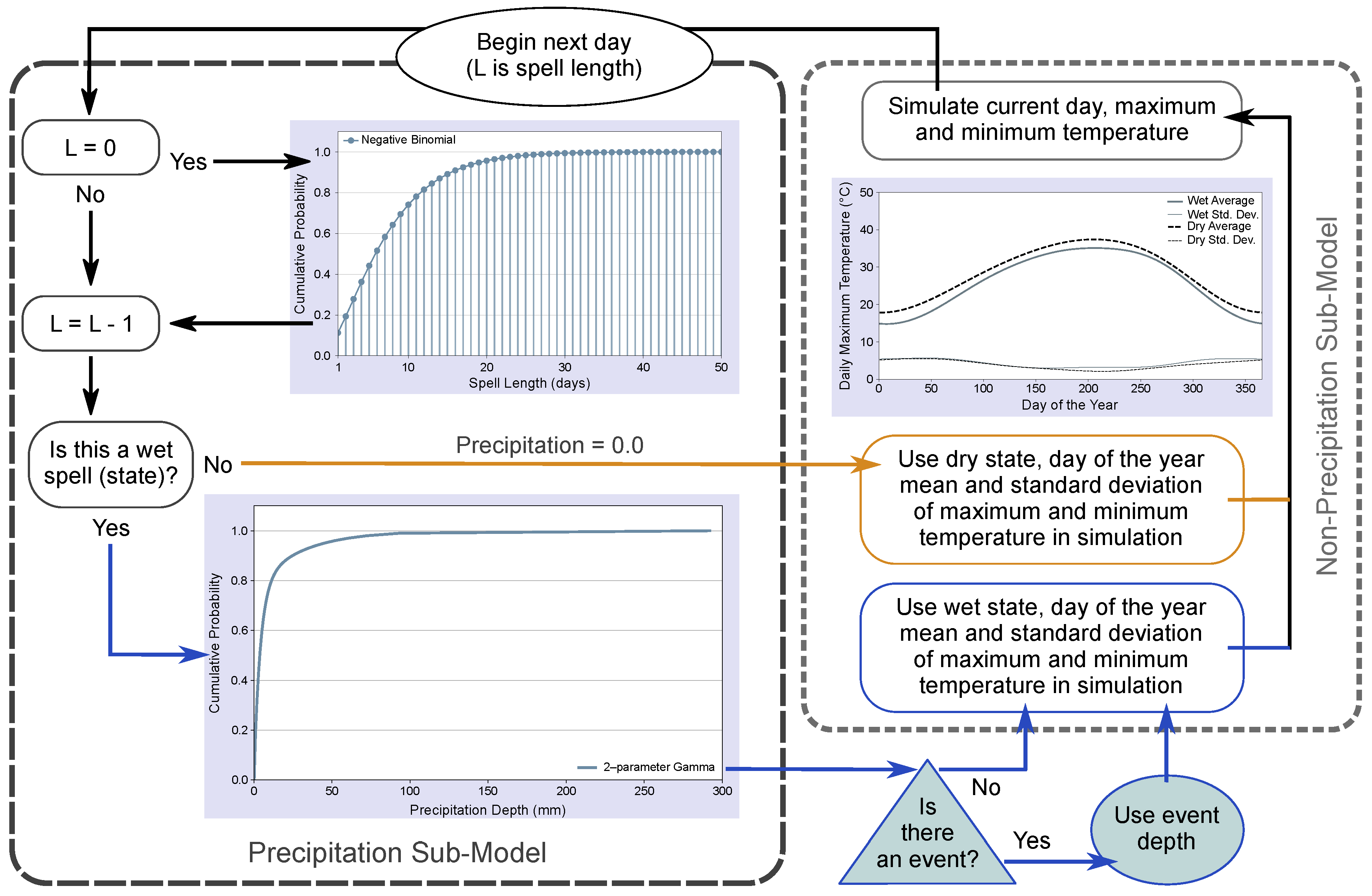
Stochastic WGs produce stochastic day-to-day weather, which is sampled from an underlying stochastic “climate” process that is specified when the WG is formulated. The underlying “climate” process is primarily specified through configuration and parameterization of the probability distributions that comprise the WG, as shown in
Figure 6. For WG, the underlying “climate” process is external to the WG and must be derived or depicted based on other sources of information.
CMIP models are clearly superior to WGs in many cases because they provide stochastic day-to-day weather sampled from the underlying “climate” process and the physics-based description and representation of the “climate” process. A WG can only provide stochastic day-to-day weather sampled from an externally specified “climate” process. One scenario for which WGs provide additional utility relative to CMIP models is the case where the “climate” process has been described from other sources and datasets and is different in some manner from the “climate” process representation provided by CMIP models. An example of this scenario is the representation of extreme events.
Extreme events fall within the tails of the long-term aggregated description of weather that constitutes climate. A climate description can provide a probability for the occurrence of a generic event magnitude. However, for analyzing the likelihood of a regional-scale event, CMIP models alone are insufficient, as they are global in scale. In such analyses, CMIP simulation results are often augmented with other information sources, such as high-resolution, regional geophysical models and sea surface temperature models.
An observed event is weather, not climate. Weather attribution is a formalized and scientific approach used to identify the change in likelihood or PR for an observed event under two different climate regimes. Attribution provides the “new” or future probability of occurrence for event magnitude. Weather attribution is used in this study to generate drought magnitude and likelihood targets for WG calibration, and attribution provides the “climate” process description that is different from that contained within CMIP results.
Two advantages to using WGs are: (1) WGs can represent a “climate” process that is different from that represented in CMIP results and (2) WGs can easily produce large numbers of stochastic realizations, i.e., tens to hundreds of thousands. A large number of realizations is required to ensure robust sampling of the stochastic weather forcing input variables to a water balance model for every model input time in a water balance model. If biased forcing, resulting from the use of too few realizations, is propagated through a water balance model, then the resulting water budget estimates will also be biased.
As an example of the importance of robust sampling, the 95th percentile time history in
Figure 4 shows a peak of about 1750 mm in 2030. This is not a future prediction contained within the LOCA2 results for the increased likelihood of a very wet year in 2030. The occurrence of a wet year in 2030 is a weather event and is only evident in
Figure 4 because 23 stochastic realizations of day-to-day weather are employed to generate the figure.
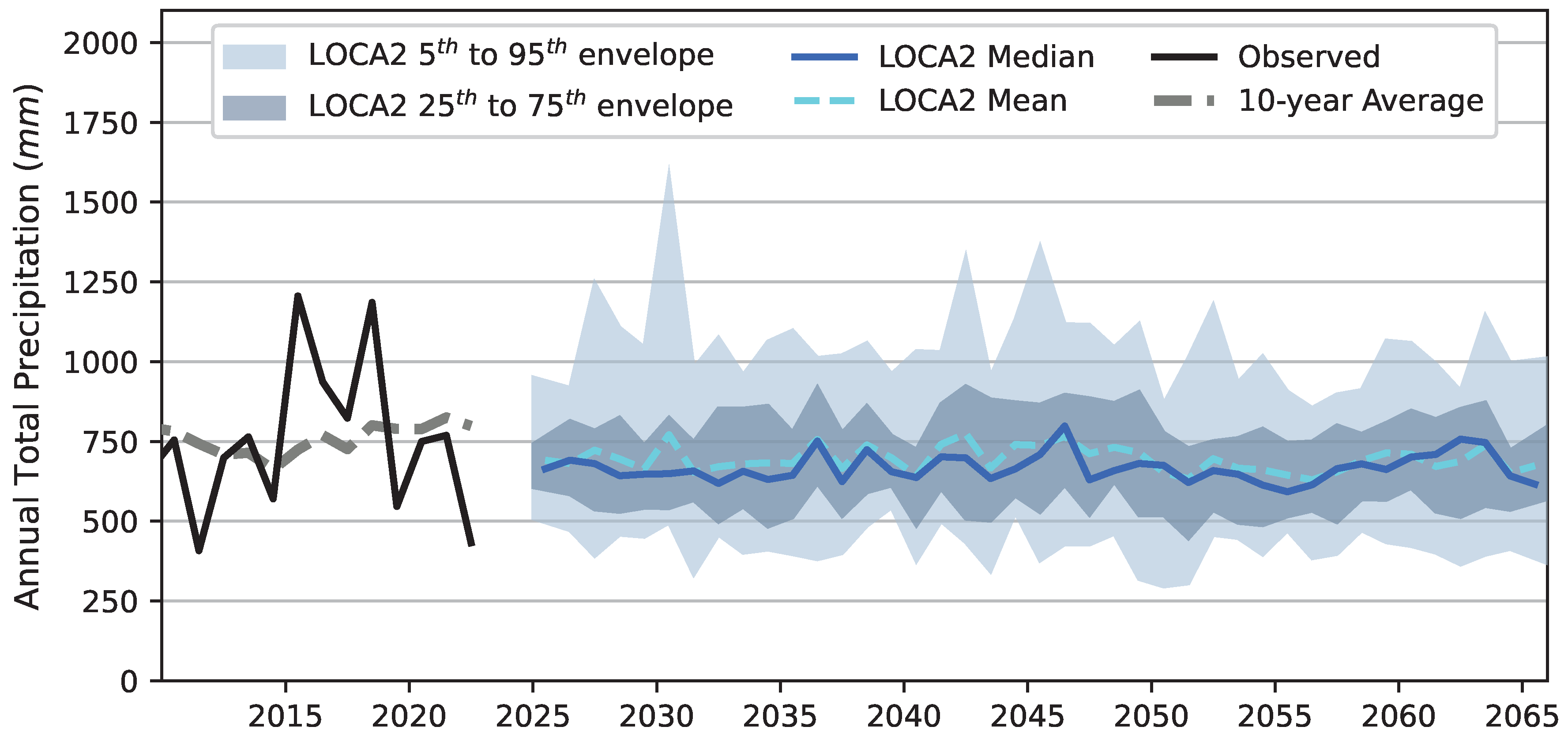
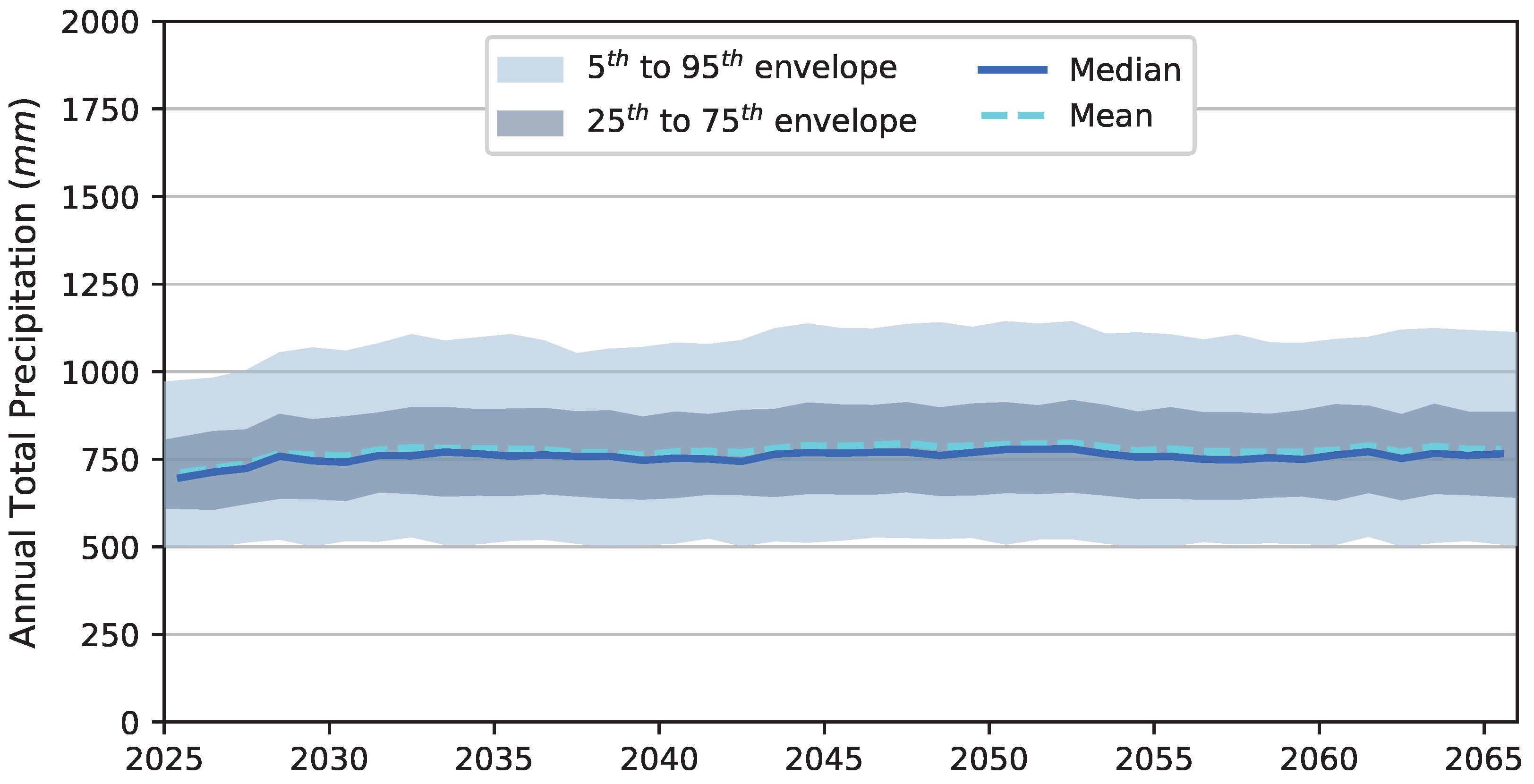
A climate description used for the forcing of a water budget model should provide approximately the same likelihood for an annual precipitation depth value for every year between 2030 and 2040. In
Figure 9, the 95th percentile time history ranges between 1048 and 1102 mm between 2030 and 2040. A total of 1000 stochastic realizations were used to produce
Figure 9; the 95th percentile time history is not as flat as would be necessary to indicate the same likelihood for an annual precipitation depth of about 1075 mm for each year between 2030 and 2040. As the number of stochastic realizations of day-to-day weather increases, probabilistic time histories, such as the 95th percentile, will become flatter within an interval of assumed stationarity.
Time stationarity is the assumption that time series statistical properties do not change across an interval. Strict stationarity is generally too restrictive, and a reduced requirement, called weak stationarity, is often used. Weak stationarity imposes restrictions on the first two statistical moments of the time series; it formally requires a constant mean and an autocovariance function that depends only on the time difference or lag and is independent of the specific points in time that are differenced [
47,
48]. The WG formulation presented in
Figure 6 enforces strict stationarity across the simulation interval because the probability distributions that comprise the WG are defined in generalized form, requiring three to four parameters, and the parameters that define the probability distributions are held constant across the simulation interval.
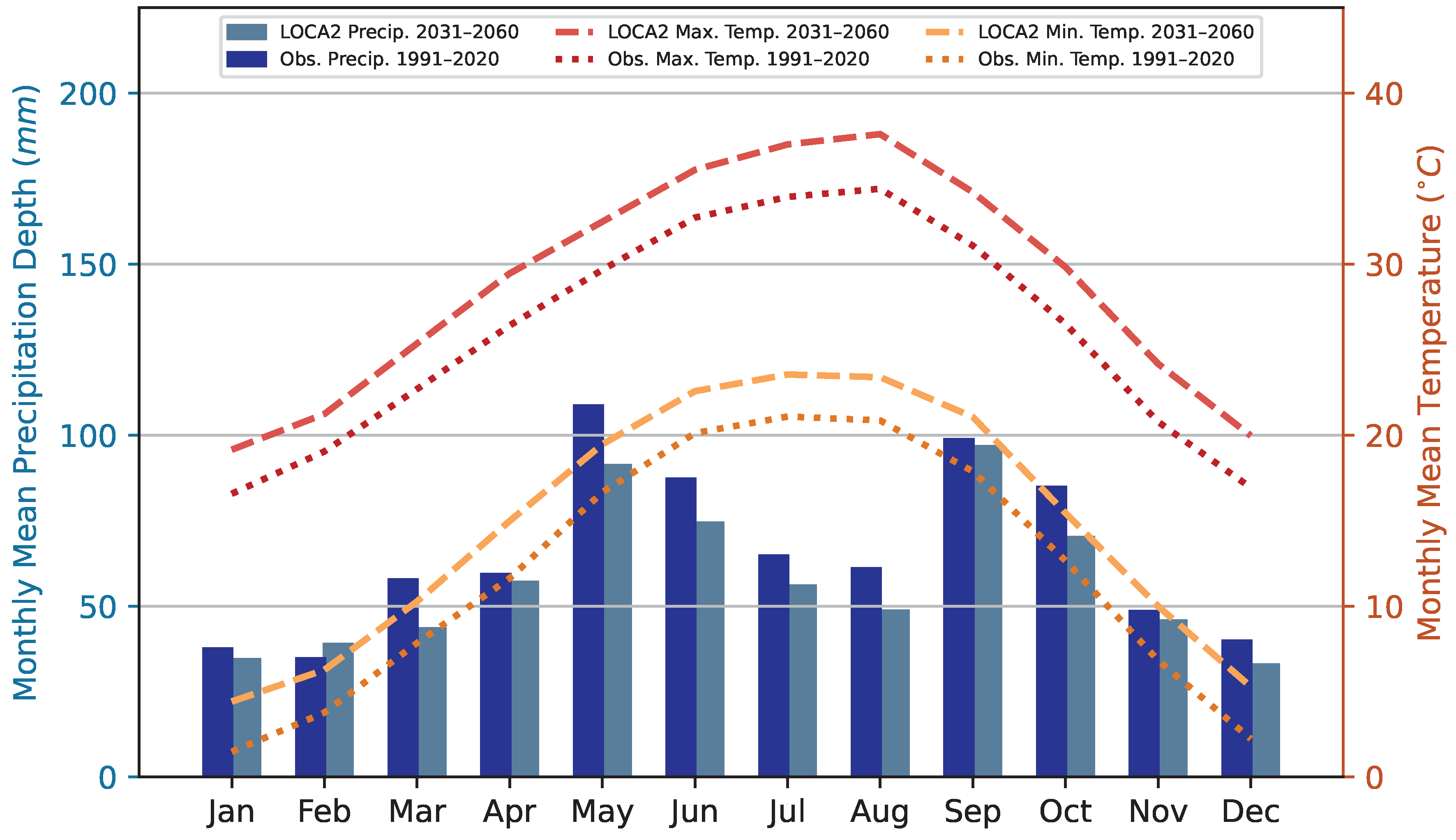
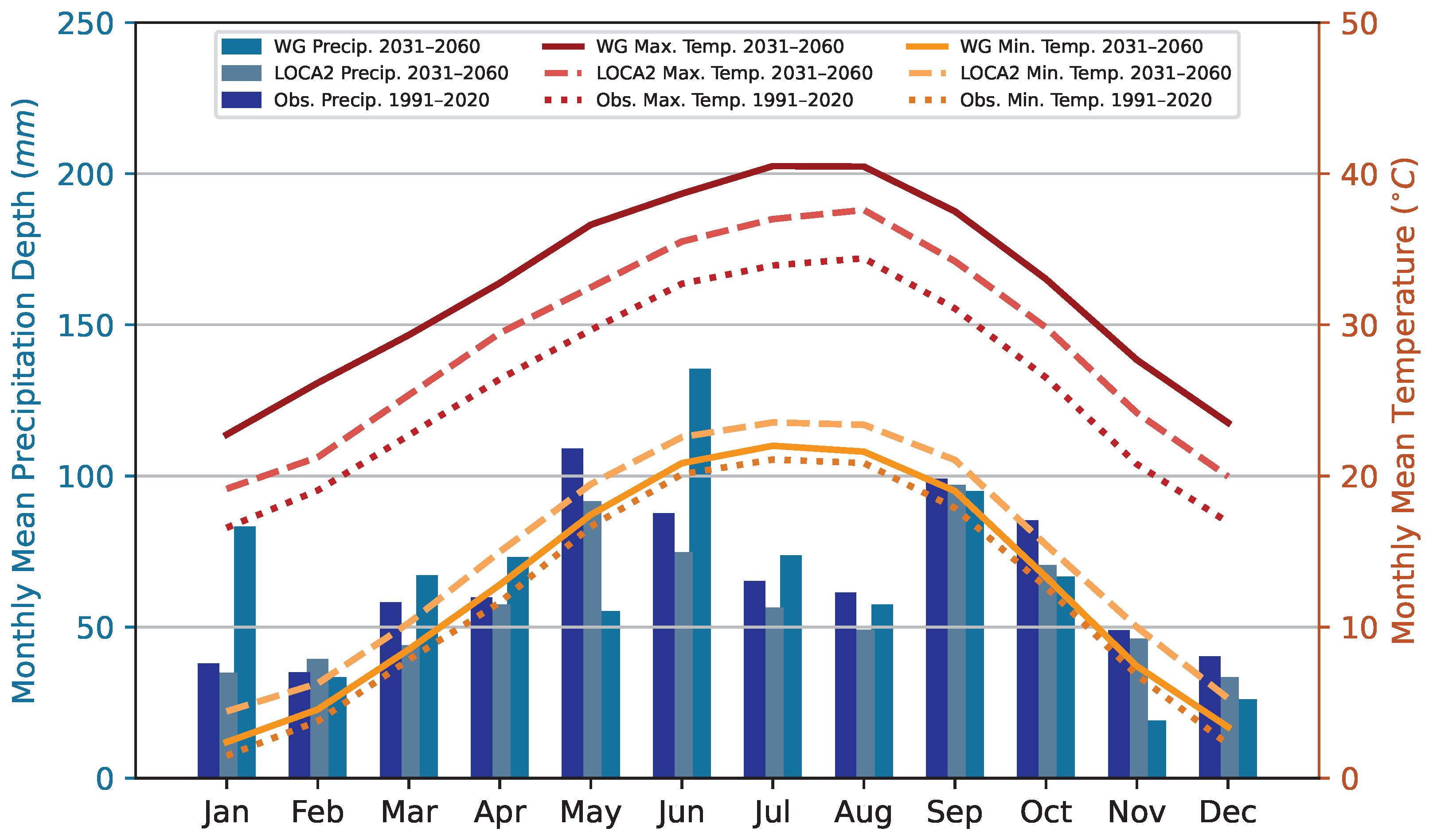
Two disadvantages of using WGs relative to CMIP results are: (1) WGs are purely statistical and probabilistic, relying on robust sampling to produce a meaningful climate description, and (2) WGs inherently require the assumption of time stationarity and cannot represent the physics-based evolution of process functions to produce trends. An example of the first shortcoming can be seen in
Figure 7, where the structure of the
calculation employed in this study pushes the calibrated WG daily maximum and minimum temperatures apart in order to increase the calculated
to meet the constraint of the drought targets. The LOCA2 results in
Figure 7 suggest a more likely future climate description, where both maximum and minimum temperatures increase uniformly and there is relatively constant increase in the projected future temperature. An example of the second shortcoming is presented in
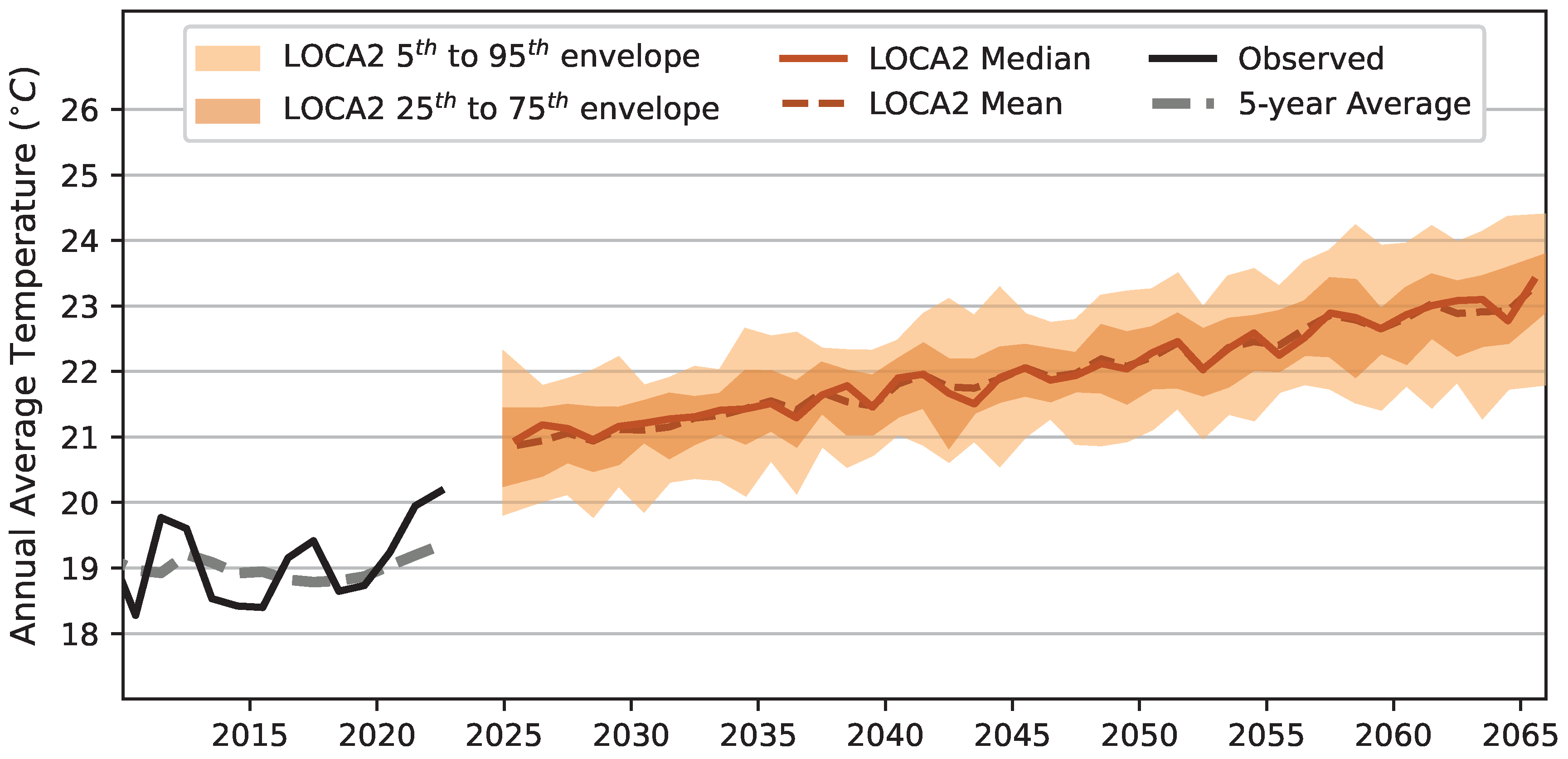
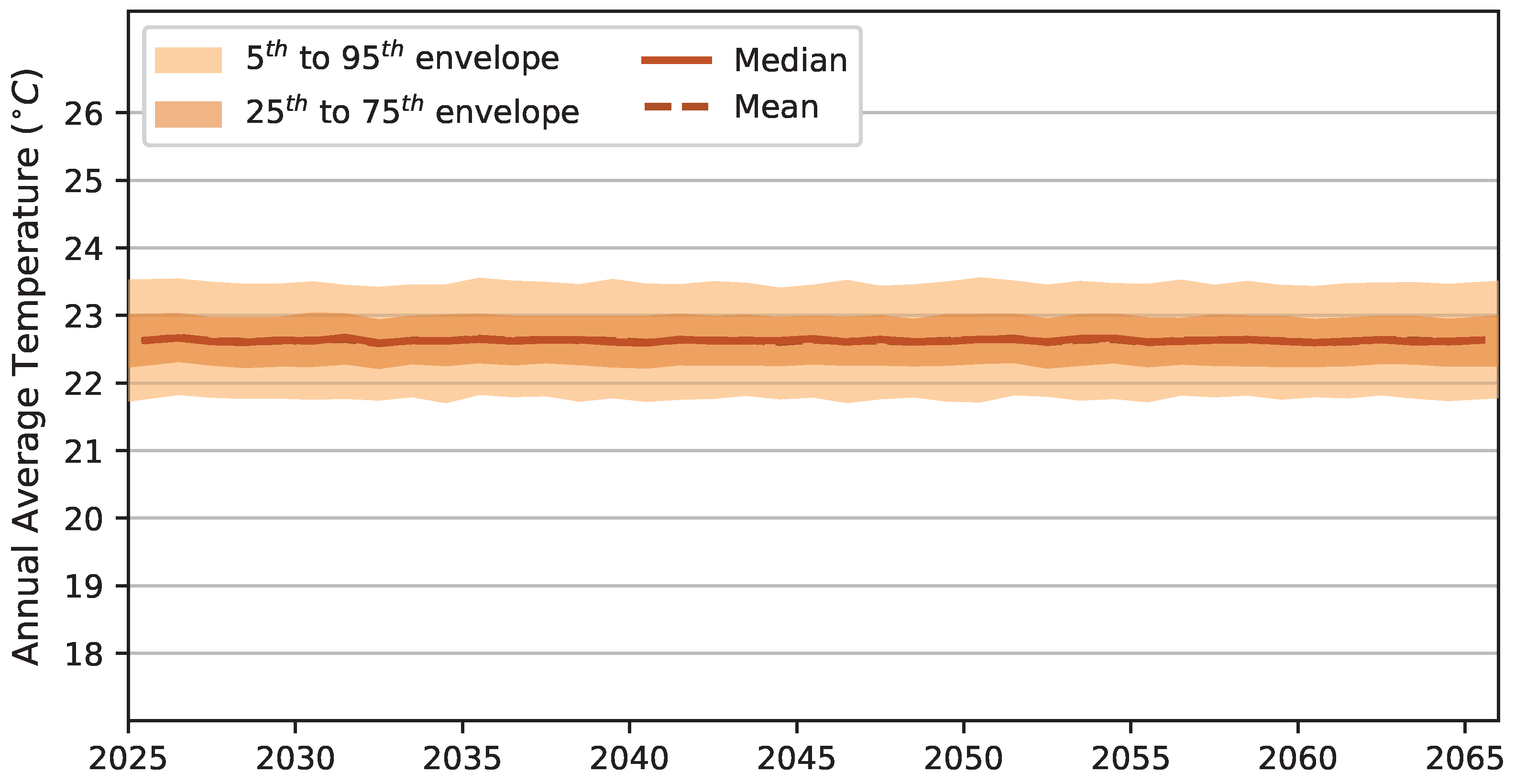
Figure 8, where the calibrated WG simulated annual average temperature is relatively flat or constant across the simulation interval. An improved representation is provided in
Figure 3, where there is a trend of an increasing average annual temperature across the analysis interval. One approach that can be implemented with WGs to partially represent trends is to use several intervals of assumed stationarity to reproduce the trend in a step-wise fashion [
7,
8].
Stochastic simulation is a system simulation that uses variables that can change randomly with individual probabilities for each variable [
49,
50]. When an ensemble of stochastic realizations of day-to-day weather is used for input water budget model forcing, then the water budget simulation framework is stochastic. When observed weather forcing is used for input water budget model forcing and resulting water budget calculation outputs are compared to observations, like in traditional model calibration, the water budget simulation framework is deterministic. For both types of inputs (stochastic and observed), the water budget model itself, in contrast to the simulation framework, is deterministic if it always produces the same results for the same inputs.
For stochastic simulation, the sampling of variables, which change randomly with individual probability distributions, directly controls the quality of the results obtained. Sampling bias is an error in estimates or simulation results due to a sampling procedure that is not representative of the underlying population described by the probability distribution [
51]. In many cases, the sampling of the stochastic inputs is more important than the deterministic water budget model used to propagate uncertainty from stochastic inputs to estimates or outputs.
When stochastic inputs or variables are used and the water budget modeling framework is stochastic, simulation results must be presented probabilistically with cones of uncertainty, similar to what is done in
Figure 8 and
Figure 9, or as long–term ensemble averages, as done with the Climate Normals in
Figure 7. The simulation results for a single outcome realization always present sampling bias because a single outcome realization is derived from a single input forcing sample.
Future Work
WG formulation in this study focuses on reproducing attribution study likelihoods and historically observed annual average precipitation depth. CMIP6 ssp585 simulation results are used in the attribution study to determine the change in likelihood but are not directly employed as targets for WG training.
Future work will examine explicitly combining CMIP simulation results and weather attribution to generate a comprehensive set of targets for WG calibration. Specifically, it would be interesting to use the annual average precipitation depth and 2031–2060 average monthly precipitation depths, see
Figure 7, from the LOCA2 2031–2060 climate description, in addition to the drought likelihood and magnitude values, see
Table 4, as calibration targets.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











