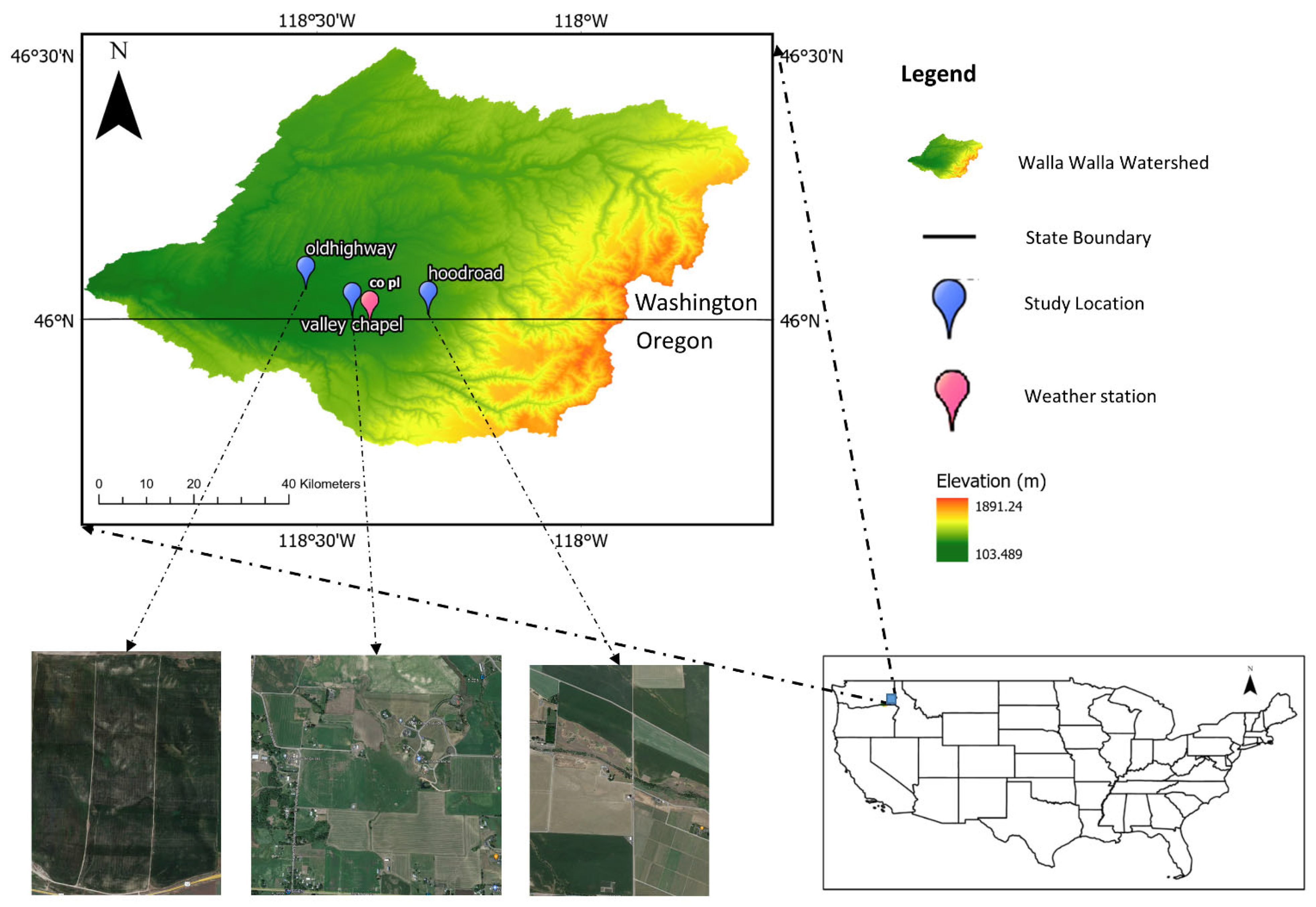
Figure 1.
Map of the Walla Walla River basin with color ramp for elevation. Blue pinpoints indicate the locations of the study area while pink pinpoint represents the weather station. Sites 1–5 are located in valley Chapel, sites 6 and 7 are located in old highway, and sites 8–10 are located in hood road.
Figure 1.
Map of the Walla Walla River basin with color ramp for elevation. Blue pinpoints indicate the locations of the study area while pink pinpoint represents the weather station. Sites 1–5 are located in valley Chapel, sites 6 and 7 are located in old highway, and sites 8–10 are located in hood road.
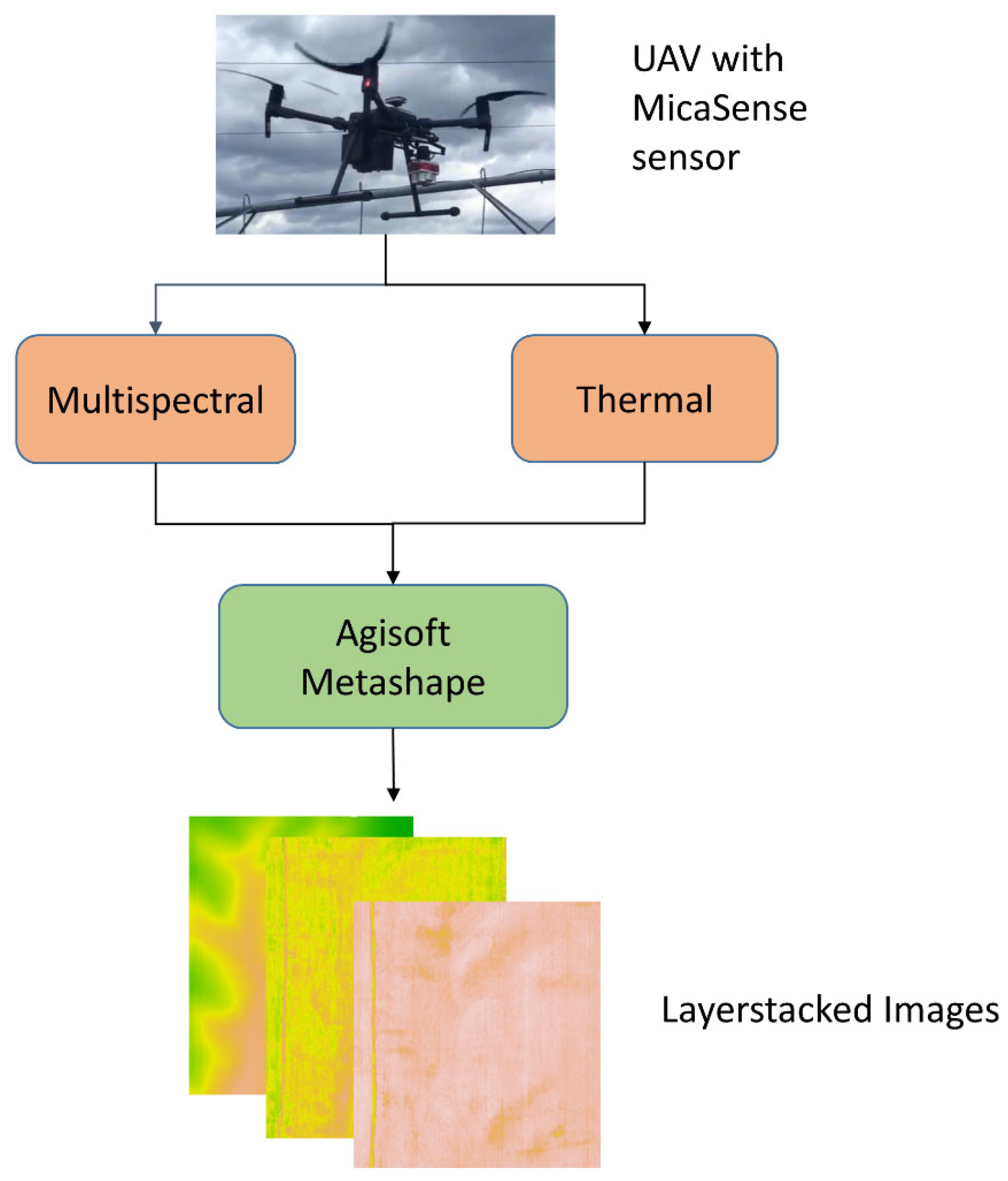
Figure 2.
Flowchart showing the process for obtaining layerstacked (blue, green, red, near infrared, and thermal bands) UAV imagery.
Figure 2.
Flowchart showing the process for obtaining layerstacked (blue, green, red, near infrared, and thermal bands) UAV imagery.
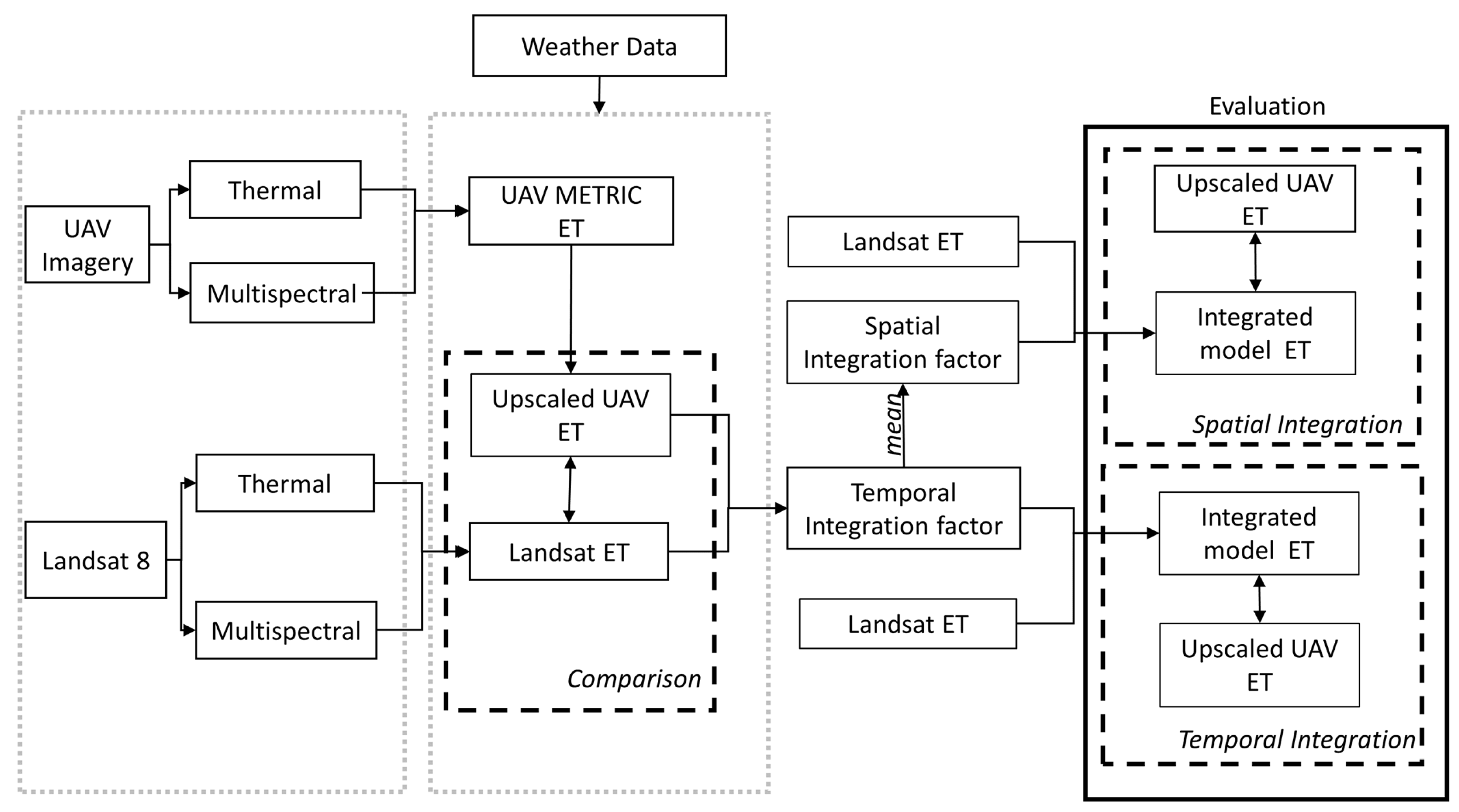
Figure 3.
Flowchart for the comparison and integration of ET. Integrated model ET is the combination of the Landsat and UAV ET.
Figure 3.
Flowchart for the comparison and integration of ET. Integrated model ET is the combination of the Landsat and UAV ET.
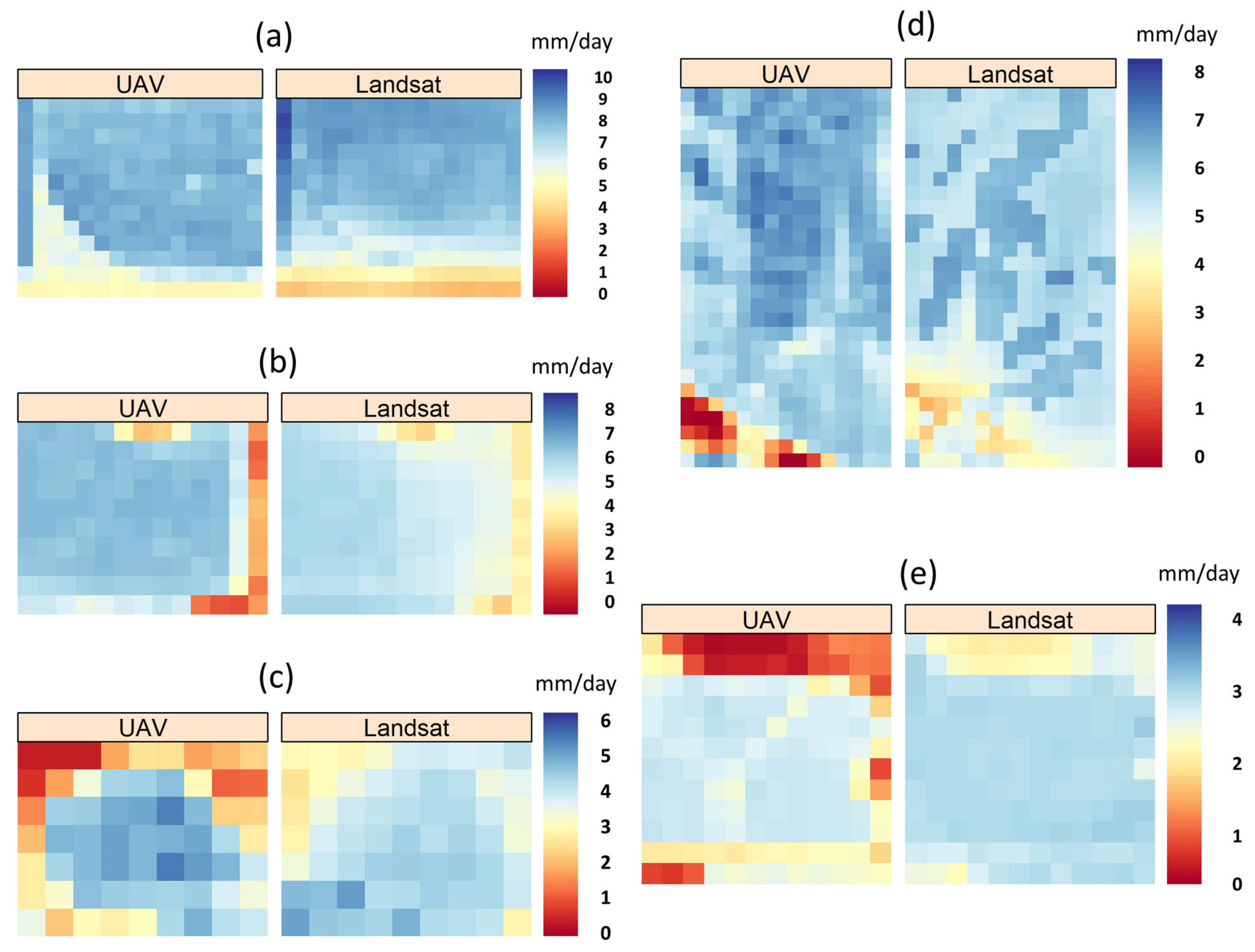
Figure 4.
Sample comparison of 24-h ET mapped with UAV and Landsat at Landsat scale on five crops: (a) corn (area: 18.72 hectares) on 11 July 2021, (b) peas (area: 11.7 hectares) on 21 June 2022, (c) rye grass (area: 5.67 hectares) on 11 May 2022, (d) wheat (area: 36.45 hectares) on 21 June 2022, and (e) alfalfa (area: 12.96 hectares) on 12 May 2022.
Figure 4.
Sample comparison of 24-h ET mapped with UAV and Landsat at Landsat scale on five crops: (a) corn (area: 18.72 hectares) on 11 July 2021, (b) peas (area: 11.7 hectares) on 21 June 2022, (c) rye grass (area: 5.67 hectares) on 11 May 2022, (d) wheat (area: 36.45 hectares) on 21 June 2022, and (e) alfalfa (area: 12.96 hectares) on 12 May 2022.
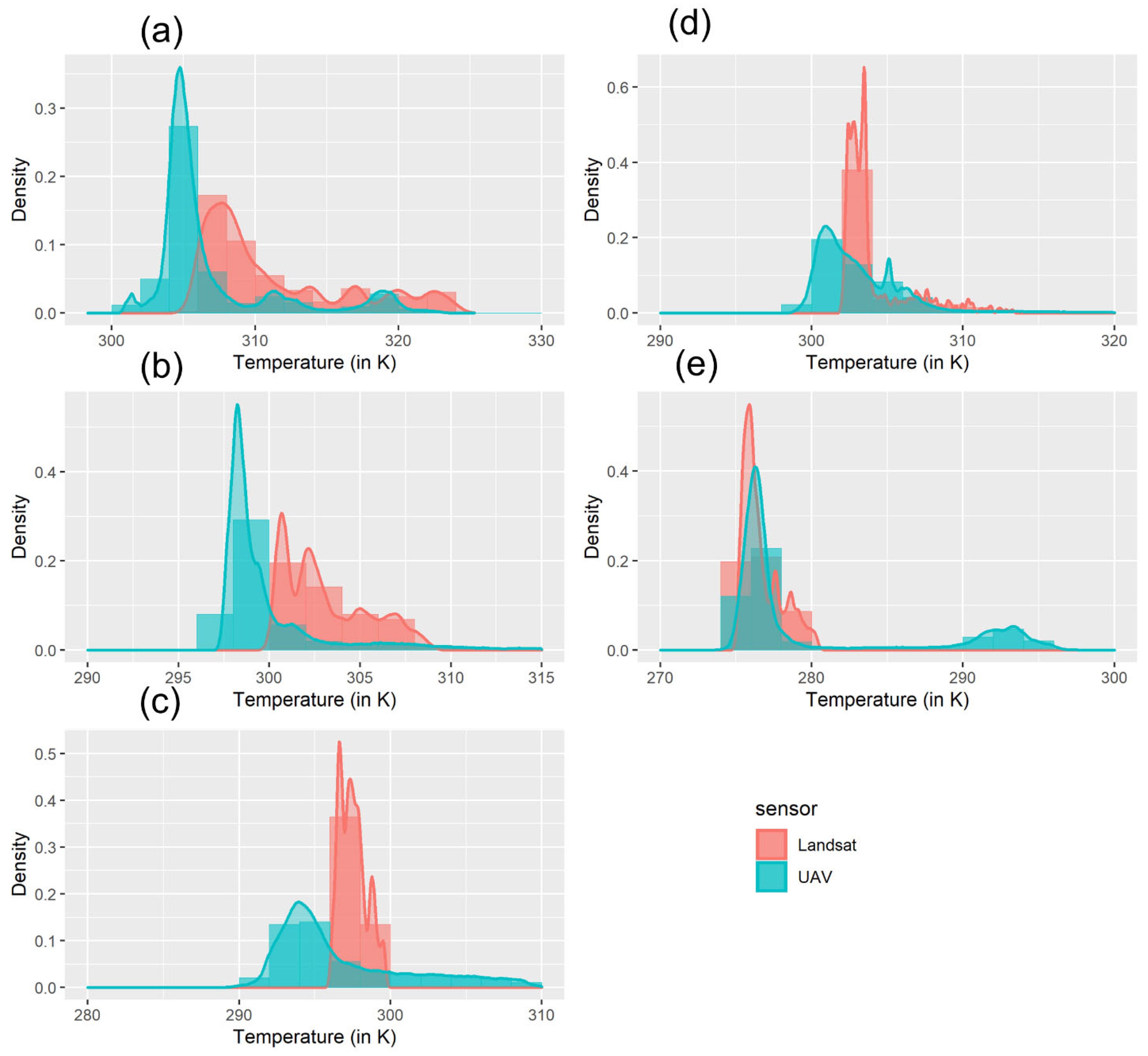
Figure 5.
Thermal density histogram plot of the sample five crops (a) corn on 11 July 2021, (b) peas on 21 June 2022 (c) rye grass on 11 May 2022, (d) wheat on 21 June 2022 and (e) alfalfa on 12 May 2022. The green and pink lines are the curves for kernel density distribution for UAV and Landsat temperature respectively.
Figure 5.
Thermal density histogram plot of the sample five crops (a) corn on 11 July 2021, (b) peas on 21 June 2022 (c) rye grass on 11 May 2022, (d) wheat on 21 June 2022 and (e) alfalfa on 12 May 2022. The green and pink lines are the curves for kernel density distribution for UAV and Landsat temperature respectively.
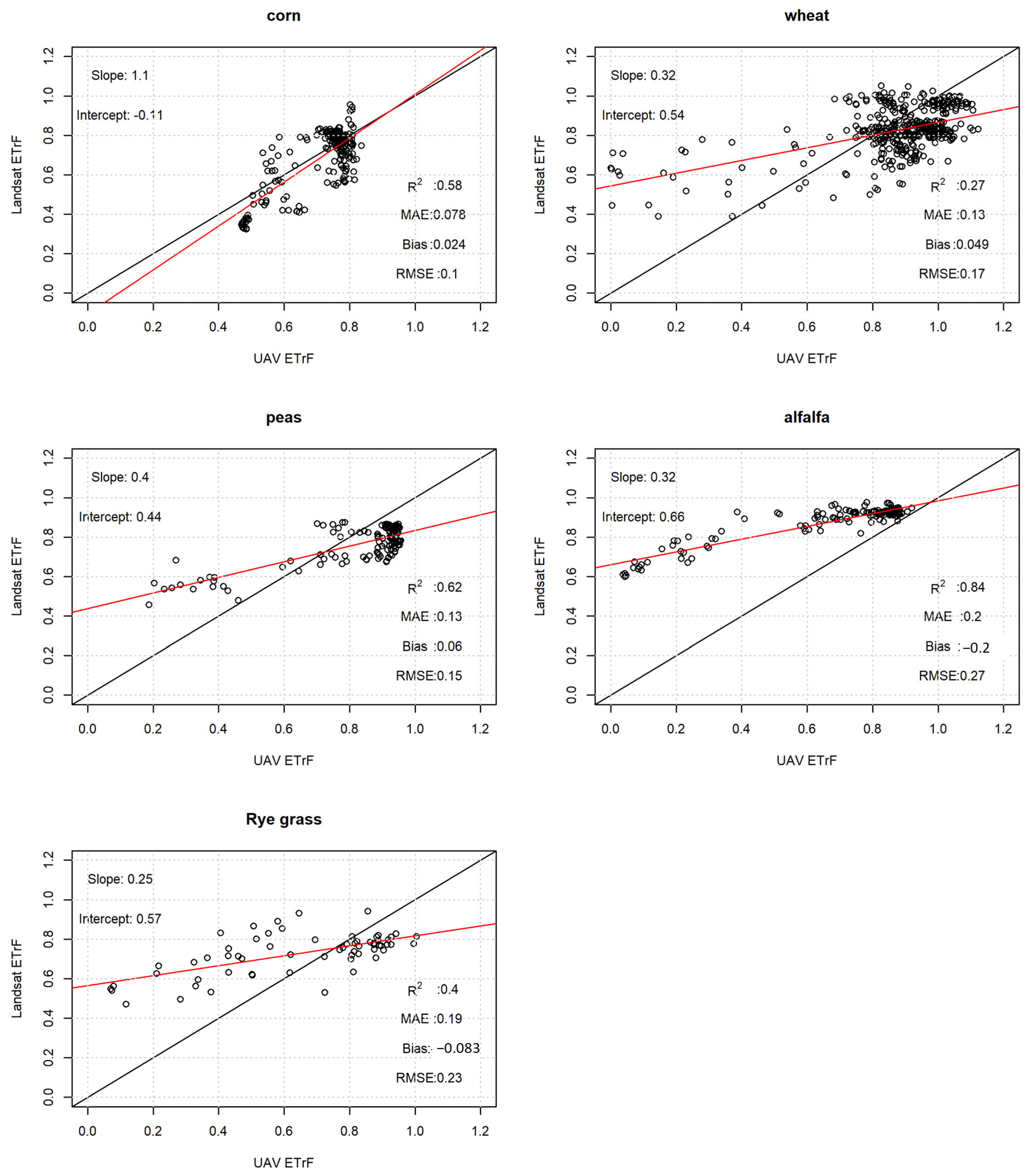
Figure 6.
Scatterplot of Landsat ETrF vs. UAV EtrF on five sample crops used for this study. Each subplots represent the scatterplot with the corresponding slope, intercept, coefficient of determination, mean absolute error, bias, and root mean square error values. Black line is the line with slope of 1 and red line is the line of regression.
Figure 6.
Scatterplot of Landsat ETrF vs. UAV EtrF on five sample crops used for this study. Each subplots represent the scatterplot with the corresponding slope, intercept, coefficient of determination, mean absolute error, bias, and root mean square error values. Black line is the line with slope of 1 and red line is the line of regression.
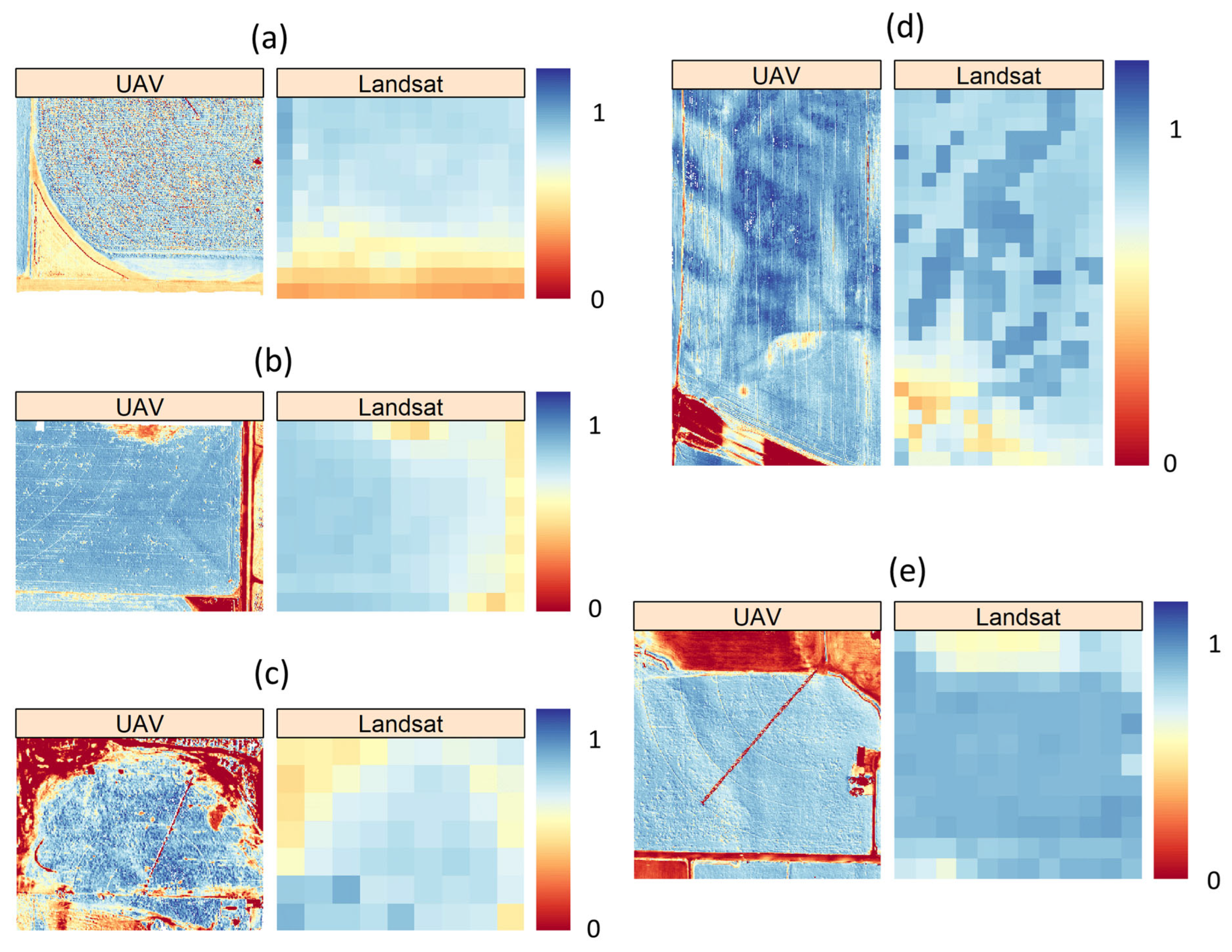
Figure 7.
Raster plot showing the variability of ETrF being captured by UAV and Landsat on five crops: (a) corn (area: 18.72 hectares) on 11 July 2021, (b) peas (11.7 hectares) on 21 June 2022, (c) rye grass (5.67 hectares) on 11 May 2022, (d) wheat (36.45 hectares) on 21 June 2022, and (e) alfalfa (12.96 hectares) on 12 May 2022.
Figure 7.
Raster plot showing the variability of ETrF being captured by UAV and Landsat on five crops: (a) corn (area: 18.72 hectares) on 11 July 2021, (b) peas (11.7 hectares) on 21 June 2022, (c) rye grass (5.67 hectares) on 11 May 2022, (d) wheat (36.45 hectares) on 21 June 2022, and (e) alfalfa (12.96 hectares) on 12 May 2022.
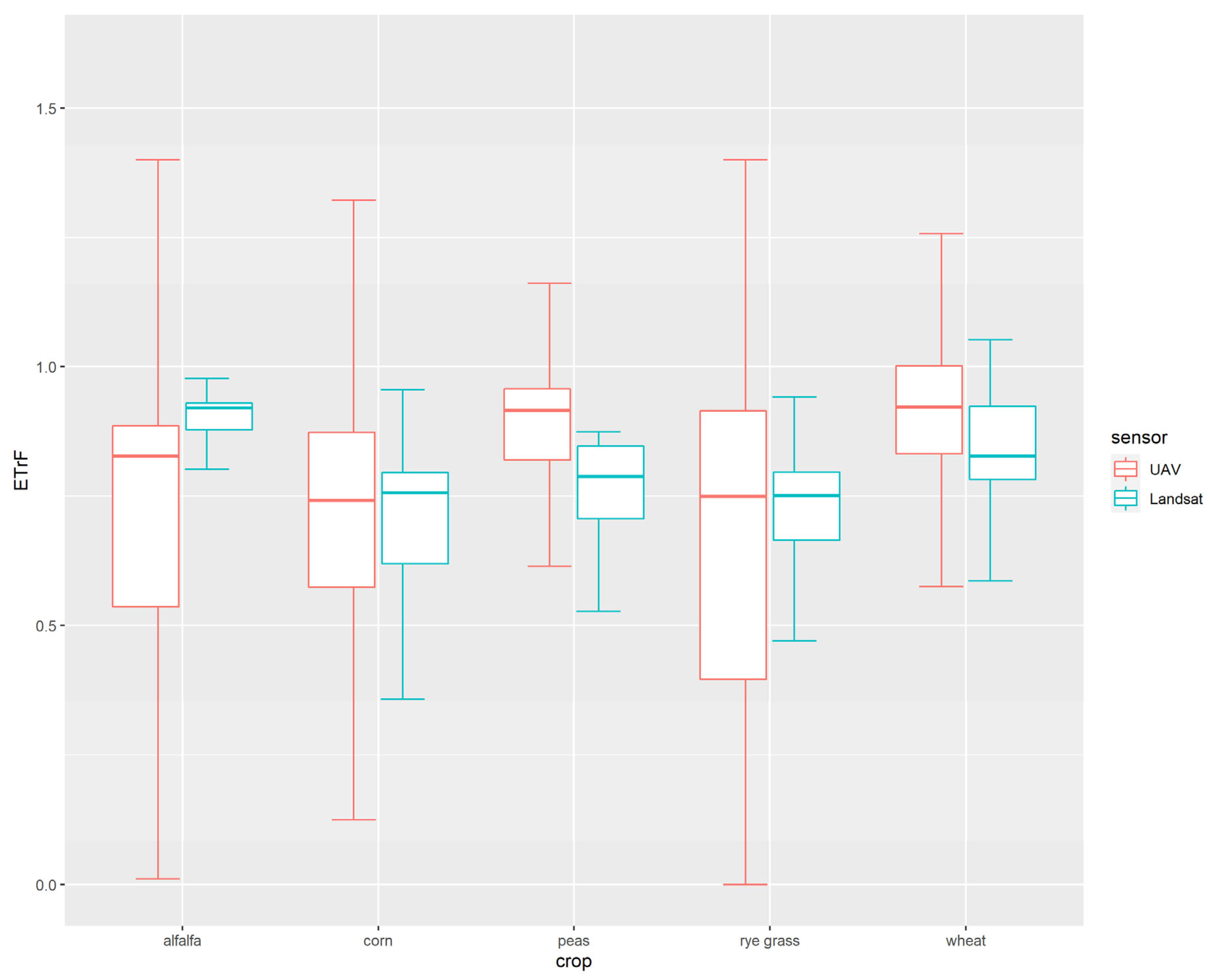
Figure 8.
The boxplot showing the variability of ETrF being captured by the two sensors for five different crops alfalfa, corn, peas, rye grass, and wheat.
Figure 8.
The boxplot showing the variability of ETrF being captured by the two sensors for five different crops alfalfa, corn, peas, rye grass, and wheat.
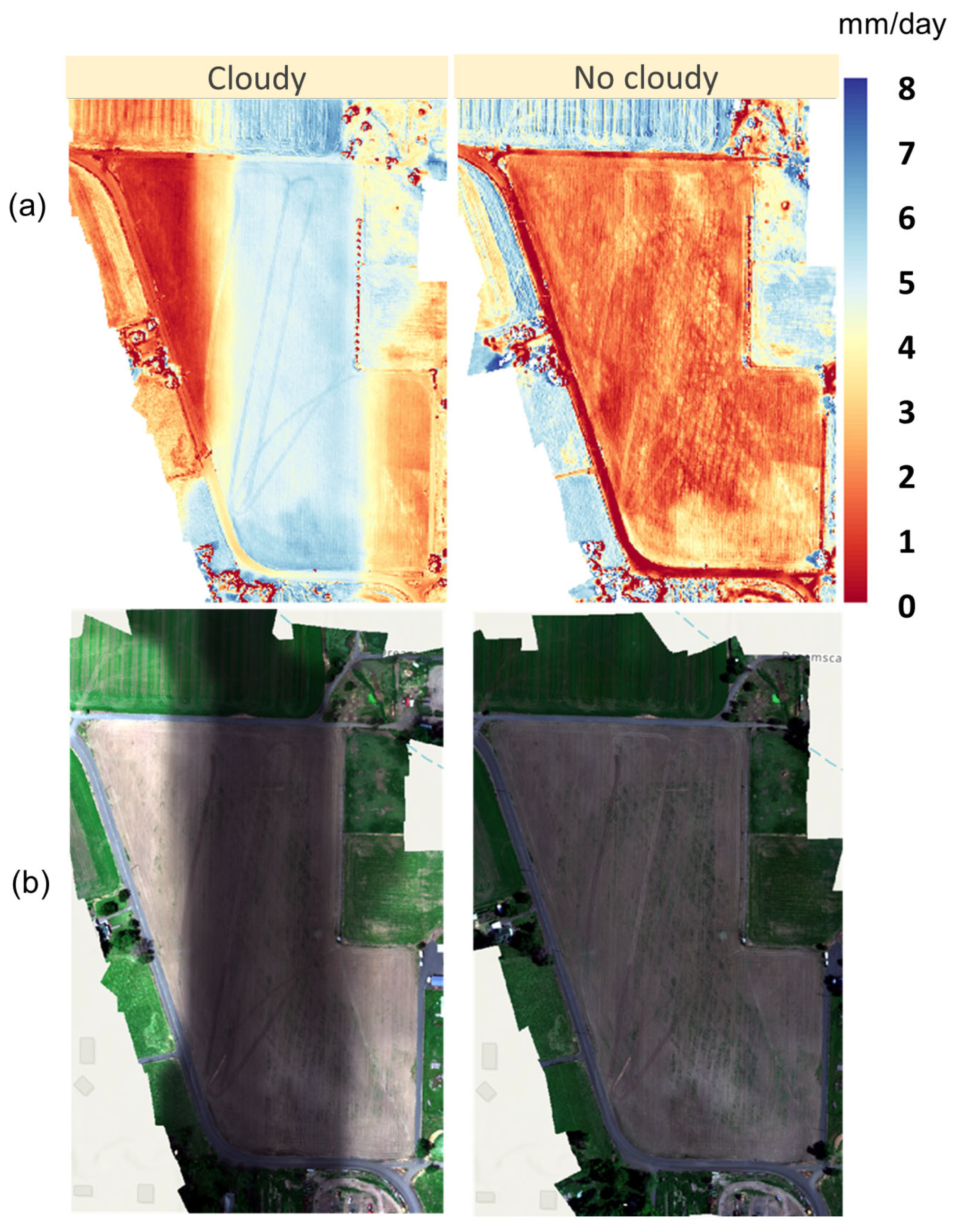
Figure 9.
(a) METRIC actual evapotranspiration (b) true color image over site3 on 20 June 2022 at 11:10 a.m. (cloudy) and 9:35 a.m. (no cloudy) in Pacific Daylight Saving Time.
Figure 9.
(a) METRIC actual evapotranspiration (b) true color image over site3 on 20 June 2022 at 11:10 a.m. (cloudy) and 9:35 a.m. (no cloudy) in Pacific Daylight Saving Time.
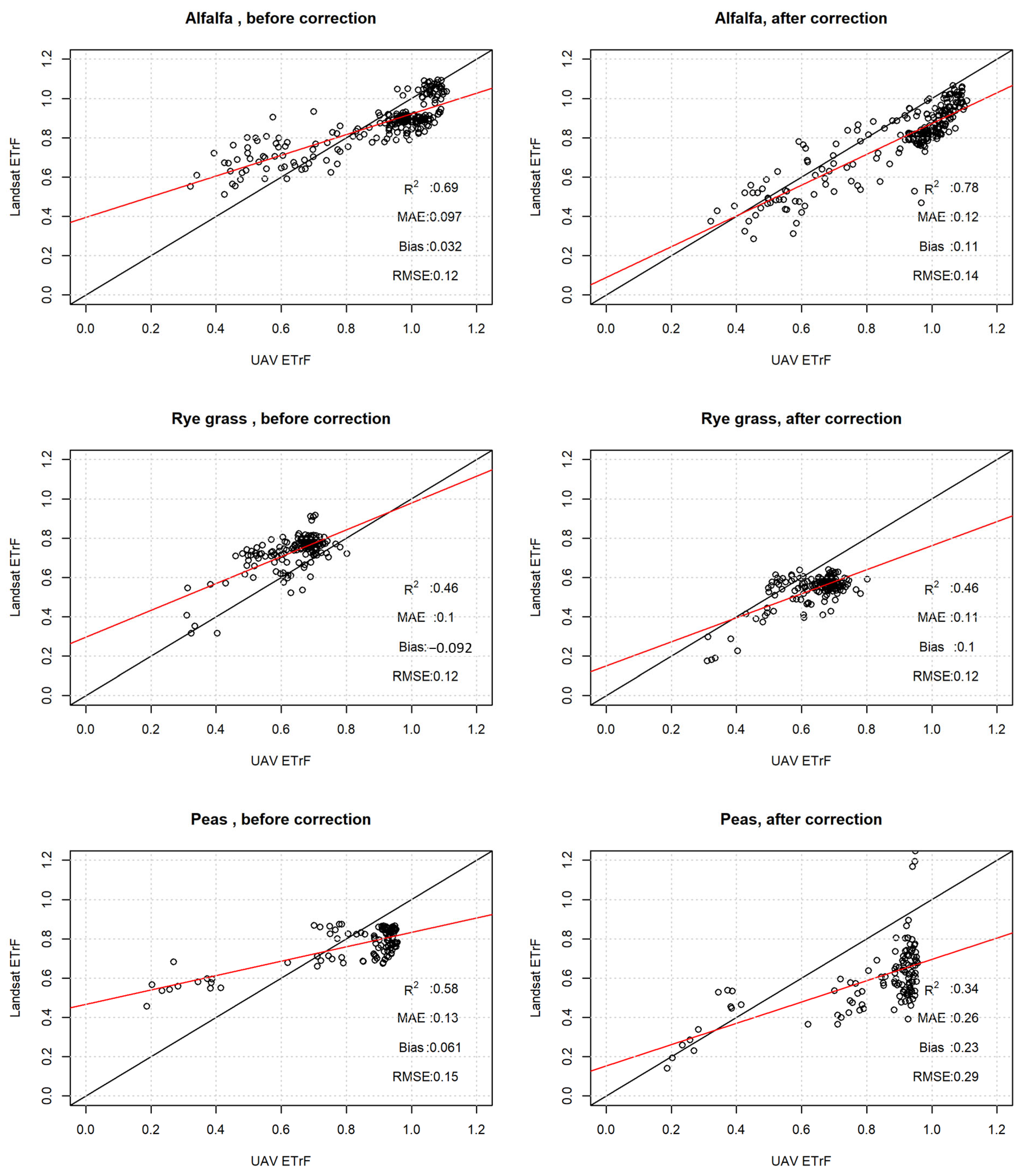
Figure 10.
Change of ETrF with and without the application of the time series integration factor on alfalfa, rye grass, and peas. Each subplot represents the scatterplot with the corresponding coefficient of determination, mean absolute error, bias, and root mean square values. Black line is the line with slope of 1 and red line is the line of regression.
Figure 10.
Change of ETrF with and without the application of the time series integration factor on alfalfa, rye grass, and peas. Each subplot represents the scatterplot with the corresponding coefficient of determination, mean absolute error, bias, and root mean square values. Black line is the line with slope of 1 and red line is the line of regression.
Figure 11.
The UAV and Landsat based ET with and without the application of the integration factor on Landsat based ET (a) wheat on 21 June 2022 (b) alfalfa on 11 May (c) corn on 11 July 2021 (d) rye grass on 11 May 2022 (e) peas on 11 May 2022. UAV, Landsat, and Integrated represents the UAV estimated ET, Landsat estimated ET, and integrated ET, respectively.
Figure 11.
The UAV and Landsat based ET with and without the application of the integration factor on Landsat based ET (a) wheat on 21 June 2022 (b) alfalfa on 11 May (c) corn on 11 July 2021 (d) rye grass on 11 May 2022 (e) peas on 11 May 2022. UAV, Landsat, and Integrated represents the UAV estimated ET, Landsat estimated ET, and integrated ET, respectively.
Table 1.
Details of the experimental field sites used for mapping UAV imagery with types of crops, irrigation system, acquisition time of UAV images, Landsat overpass, and location. The acquisition time of UAV images and Landsat overpass are reported in 24-h format Pacific Daylight Saving Time (PDT). Sites 1–5 are located in valley Chapel, sites 6 and 7 are located in old highway, and sites 8–10 are located in hood road areas in Walla Walla, WA. Two UAV acquisitions were performed on Site 3 on 20 June 2022.
Table 1.
Details of the experimental field sites used for mapping UAV imagery with types of crops, irrigation system, acquisition time of UAV images, Landsat overpass, and location. The acquisition time of UAV images and Landsat overpass are reported in 24-h format Pacific Daylight Saving Time (PDT). Sites 1–5 are located in valley Chapel, sites 6 and 7 are located in old highway, and sites 8–10 are located in hood road areas in Walla Walla, WA. Two UAV acquisitions were performed on Site 3 on 20 June 2022.
| Crop | Day Month Year | Sites | Time of UAV Acquisition | Time of Landsat Overpass | Location | Irrigation System |
|---|
| Alfalfa | 11 July 2021 | Site 8 | 10:07 | 11:43 | Hood Road | Hand Line |
| 11 May 2022 | Site 4 | 09:47 | 11:43 | Valley Chapel | Center Pivot |
| 11 May 2022 | Site 8 | 12:15 | 11:43 | Hood Road | Hand Line |
| 12 May 2022 | Site 5 | 11:18 | 11:37 | Valley Chapel | Center Pivot |
| 21 June 2022 | Site 8 | 13:10 | 11:37 | Hood Road | Hand Line |
| Wheat | 11 July 2021 | Site 10 | 13:45 | 11:43 | Hood Road | Hand Line |
| 21 June 2022 | Site 6 | 10:07 | 11:37 | Old Highway | Wheel Line |
| 21 June 2022 | Site 7 | 10:40 | 11:37 | Old Highway | Wheel Line |
| Rye grass | 11 May 2022 | Site 1 | 10:12 | 11:43 | Valley Chapel | Center Pivot |
| 11 May 2022 | Site 2 | 10:35 | 11:43 | Valley Chapel | Center Pivot |
| 12 May 2022 | Site 2 | 12:43 | 11:37 | Valley Chapel | Center Pivot |
| 21 June 2022 | Site 2 | 12:10 | 11:37 | Valley Chapel | Center Pivot |
| Peas | 11 May 2022 | Site 9 | 13:02 | 11:43 | Hood Road | Center Pivot |
| 11 May 2022 | Site 10 | 13:30 | 11:43 | Hood Road | Hand Line |
| 21 June 2022 | Site 10 | 13:42 | 11:37 | Hood Road | Hand Line |
| Corn | 11 July 2021 | Site 1 | 12:25 | 11:43 | Valley Chapel | Center Pivot |
| 11 July 2021 | Site 4 | 11:37 | 11:43 | Valley Chapel | Center Pivot |
| 11 July 2021 | Site 9 | 11:07 | 11:43 | Old Highway | Center Pivot |
| 20 June 2022 | Site 3 | 10:45 | 11:27 | Valley Chapel | Center Pivot |
Table 2.
Details of Landsat used in this study with their types, path and row ids and selected area cloud cover.
Table 2.
Details of Landsat used in this study with their types, path and row ids and selected area cloud cover.
| Day Month Year | Landsat Types | PathID | RowID | Cloud Cover (%) |
|---|
| 11 July 2021 | Landsat 8 | 44 | 28 | 0 |
| 11 May 2022 | Landsat 8 | 44 | 28 | 5 |
| 12 May 2022 | Landsat 9 | 43 | 28 | 7.5 |
| 21 June 2022 | Landsat 8 | 43 | 28 | 3 |
Table 3.
Average daily weather data (minimum temperature, maximum temperature, average relative humidity, wind speed, precipitation, and solar radiation) on the days of UAV acquisitions used in this study.
Table 3.
Average daily weather data (minimum temperature, maximum temperature, average relative humidity, wind speed, precipitation, and solar radiation) on the days of UAV acquisitions used in this study.
| Day Month Year | Min Temp (°C) | Max Temp (°C) | Avg RH% | Wind Speed (m/s) | Precipitation (mm) | Solar Radiation (MJ/m2) |
|---|
| 11 July 2021 | 16.6 | 36.2 | 35.2 | 1.9 | 0 | 29.7 |
| 11 May 2022 | 1.4 | 17.8 | 66.2 | 1.7 | 0 | 28.4 |
| 12 May 2022 | 3.9 | 17.7 | 80.0 | 2.1 | 9.4 | 15.2 |
| 20 June 2022 | 12.2 | 24.8 | 71.8 | 1.9 | 0 | 26.0 |
| 21 June 2022 | 8.7 | 28.8 | 72.4 | 1.3 | 0 | 29.7 |
Table 4.
Wavelength across the sensors for multispectral (blue, green, red, and near infrared) and thermal band used in this study. UAV represent the MicaSense Altum sensor and Landsat represent the Operational Landsat Imager.
Table 4.
Wavelength across the sensors for multispectral (blue, green, red, and near infrared) and thermal band used in this study. UAV represent the MicaSense Altum sensor and Landsat represent the Operational Landsat Imager.
| Band Name | Wavelength (nm) |
|---|
| UAV | Landsat |
|---|
| Blue | 459–491 | 450–510 |
| Green | 546.5–573.5 | 533–590 |
| Red | 661–675 | 640–670 |
| NIR | 813.5–870.5 | 850–880 |
| Thermal | 800–1400 | 1060–1251 |
Table 5.
Details of the sites used (three crops) for temporal integration factor computation and the testing. Temporal integration factor was calculated using the estimated ET on Training day (T1). Integration and evaluation was done on Testing day (T2).
Table 5.
Details of the sites used (three crops) for temporal integration factor computation and the testing. Temporal integration factor was calculated using the estimated ET on Training day (T1). Integration and evaluation was done on Testing day (T2).
| S.N. | Crop | Site | Training Day Month Year | Testing Day Month Year |
|---|
| 1 | Peas | Site 10 | 11 May 2022 | 21 June 2022 |
| 2 | Alfalfa | Site 8 | 11 May 2022 | 21 June 2022 |
| 3 | Rye grass | Site 2 | 12 May 2022 | 21 June 2022 |
Table 6.
Details of the sites (five crops) used for spatial correction factor computation (training) and the testing. Spatial integration factor was calculated using the estimated ET at Training site (P1). Integration and evaluation was done on Testing site (P2).
Table 6.
Details of the sites (five crops) used for spatial correction factor computation (training) and the testing. Spatial integration factor was calculated using the estimated ET at Training site (P1). Integration and evaluation was done on Testing site (P2).
| S.N. | Crop | Day Month Year | Training Site | Testing Site |
|---|
| 1 | Corn | 11 July 2021 | Site 1 | Site 4 |
| 2 | Rye grass | 11 May 2022 | Site 1 | Site 2 |
| 3 | Alfalfa | 11 May 2022 | Site 4 | Site 8 |
| 4 | Peas | 11 May 2022 | Site 10 | Site 9 |
| 5 | Wheat | 21 June 2022 | Site 6 | Site 7 |
Table 7.
Summary statistics of ET on sample five crops across UAV and Landsat sensor at Landsat scale. Min, Max, Mean, Sd represents the minimum, maximum, average, and standard deviation of ET on the corresponding field.
Table 7.
Summary statistics of ET on sample five crops across UAV and Landsat sensor at Landsat scale. Min, Max, Mean, Sd represents the minimum, maximum, average, and standard deviation of ET on the corresponding field.
| Crop | Day Month Year | UAV (mm/day) | Landsat (mm/day) |
|---|
| Min | Max | Mean | Sd | Min | Max | Mean | Sd |
|---|
| Corn | 11 July 2021 | 4.73 | 8.40 | 7.21 | 1.02 | 3.25 | 9.61 | 6.97 | 1.49 |
| Peas | 21 June 2022 | 1.21 | 6.19 | 5.33 | 1.26 | 2.96 | 5.66 | 4.94 | 0.63 |
| Rye grass | 11 May 2022 | 0.37 | 5.29 | 3.40 | 1.37 | 2.47 | 4.96 | 3.83 | 0.55 |
| Wheat | 21 June 2022 | 0.1 | 7.27 | 5.67 | 1.25 | 2.52 | 6.81 | 5.35 | 0.76 |
| Alfalfa | 12 May 2022 | 0.11 | 2.71 | 1.99 | 0.76 | 1.77 | 2.88 | 2.60 | 0.27 |
Table 8.
Statistical measure of the relationship between fractional evapotranspiration mapped using the Landsat and UAV imagery at 30 m resolution for each day of Landsat overpass on five crops.
Table 8.
Statistical measure of the relationship between fractional evapotranspiration mapped using the Landsat and UAV imagery at 30 m resolution for each day of Landsat overpass on five crops.
| Crop | Day Month Year | R2 | RMSE | MAE | Bias |
|---|
| Alfalfa | 11 July 2021 | 0.64 | 0.15 | 0.06 | 0.04 |
| 11 May 2022 | 0.64 | 0.24 | 0.22 | −0.21 |
| 12 May 2022 | 0.84 | 0.27 | 0.20 | −0.20 |
| 21 June 2022 | 0.69 | 0.12 | 0.10 | 0.03 |
| Wheat | 11 July 2021 | 0.68 | 0.10 | 0.12 | 0.10 |
| 21 June 2022 | 0.27 | 0.17 | 0.13 | 0.05 |
| Rye grass | 11 May 2022 | 0.40 | 0.23 | 0.19 | −0.08 |
| 12 May 2022 | 0.40 | 0.20 | 0.19 | −0.21 |
| 21 June 2022 | 0.46 | 0.12 | 0.10 | −0.09 |
| Peas | 11 May 2022 | 0.49 | 0.19 | 0.18 | −0.17 |
| 21 June 2022 | 0.62 | 0.15 | 0.13 | 0.06 |
| Corn | 11 July 2021 | 0.58 | 0.10 | 0.08 | 0.02 |
Table 9.
Spatial integration factors for five crops in the descending order.
Table 9.
Spatial integration factors for five crops in the descending order.
| S.N. | Crop | Day Month Year | Integration Factor |
|---|
| 1 | Wheat | 21 June 2022 | 1.19 |
| 2 | Rye grass | 11 May 2022 | 0.87 |
| 3 | Alfalfa | 11 May 2022 | 0.75 |
| 4 | Corn | 11 July 2021 | 0.84 |
| 5 | Peas | 11 May 2022 | 0.65 |
Table 10.
Summary of statistical measure (root mean square error, mean absolute error, and bias) with and without the application of integration factor.
Table 10.
Summary of statistical measure (root mean square error, mean absolute error, and bias) with and without the application of integration factor.
| S.N. | Crop | Before Integration (mm/day) | After Integration (mm/day) |
|---|
| RMSE | MAE | Bias | RMSE | MAE | Bias |
|---|
| 1 | Wheat | 1.71 | 1.56 | 1.55 | 0.91 | 0.76 | 0.49 |
| 2 | Rye grass | 1.30 | 1.27 | −1.26 | 0.72 | 0.65 | −0.64 |
| 3 | Alfalfa | 1.22 | 1.15 | −1.15 | 0.42 | 0.30 | 0.16 |
| 4 | Corn | 1.60 | 1.30 | −1.27 | 1.03 | 0.76 | −0.32 |
| 5 | Peas | 2.63 | 2.55 | −2.55 | 1.14 | 1.09 | −0.91 |
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}