Building a SAR-Enabled Data Cube Capability in Australia Using SAR Analysis Ready Data


 ,
,
Abstract
:1. Introduction
1.1. Background
1.2. SAR ARD Products
1.2.1. Radar Backscatter
1.2.2. Dual-Polarimetric Decomposition
1.2.3. Multi-Temporal Coherence
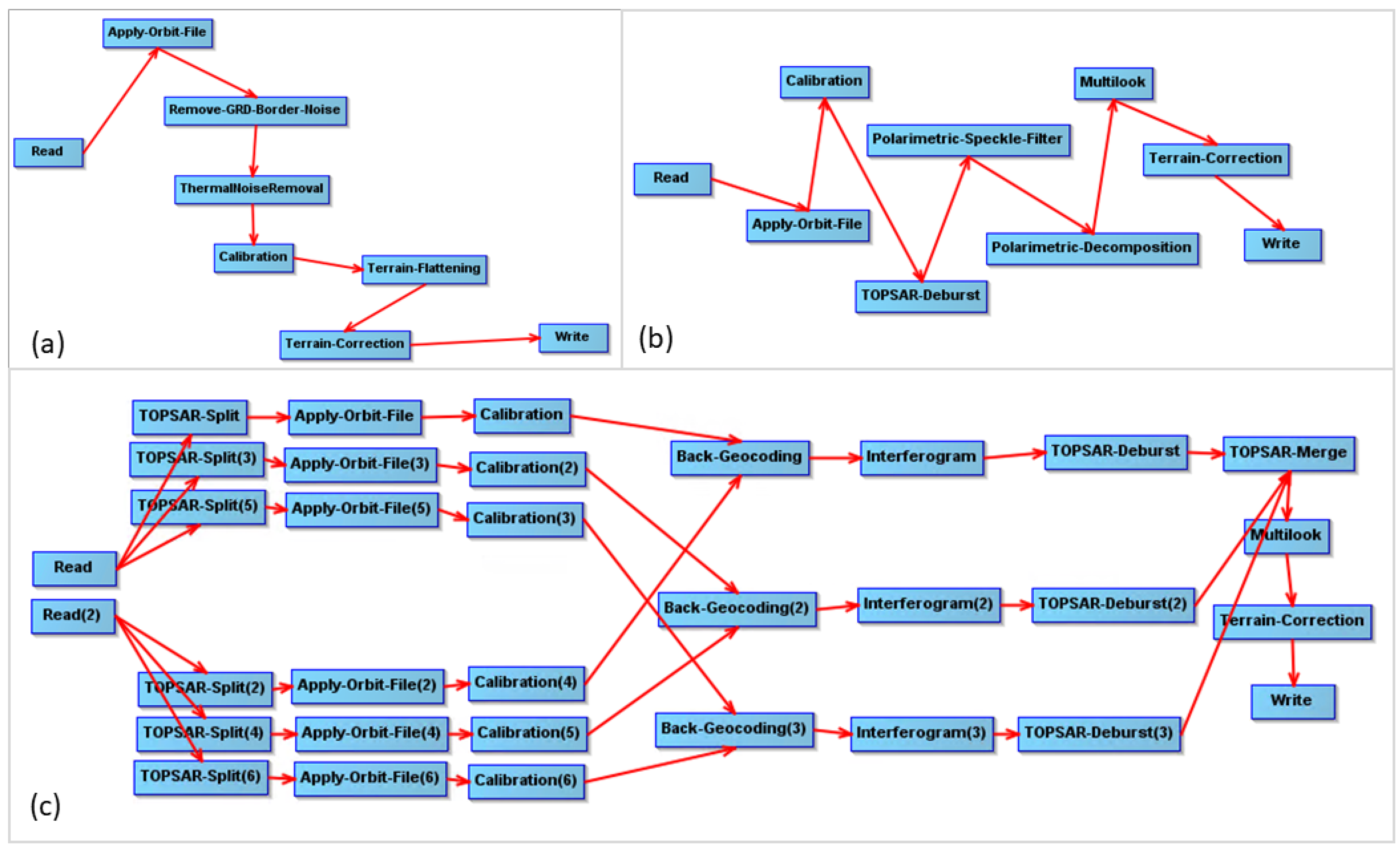
2. SNAP Graph Processing Tool Workflow
2.1. SNAP Processing
- Backscatter: 30–40 min per scene with typical input scene sizes of 0.5 Gb to 1 Gb.
- Dual-polarimetric decomposition: 80–85 min per scene with typical input scene sizes of 4.5 Gb.
- Interferometric coherence: 55–65 min per pair of Sentinel scenes with typical input scene sizes of 4.5 Gb.
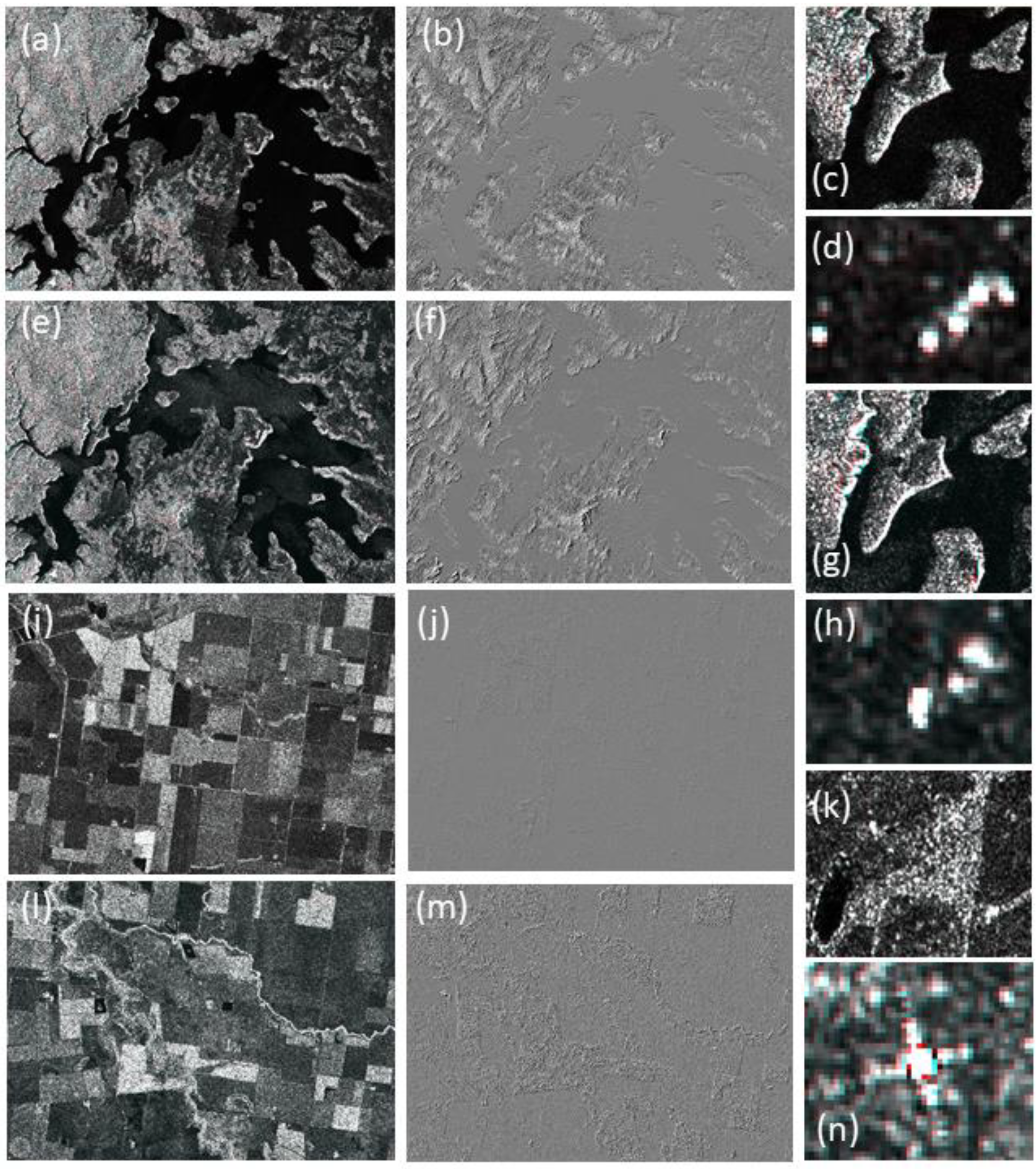
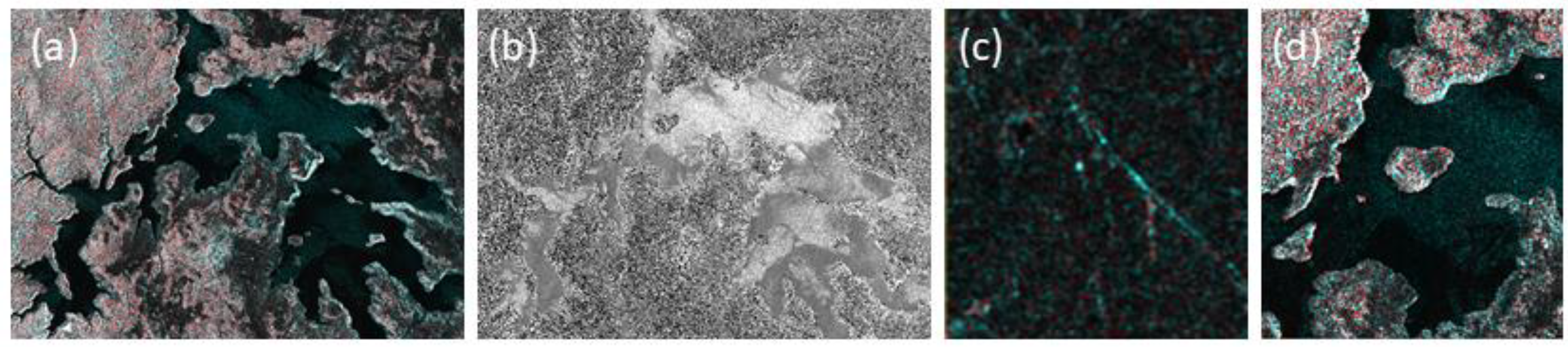
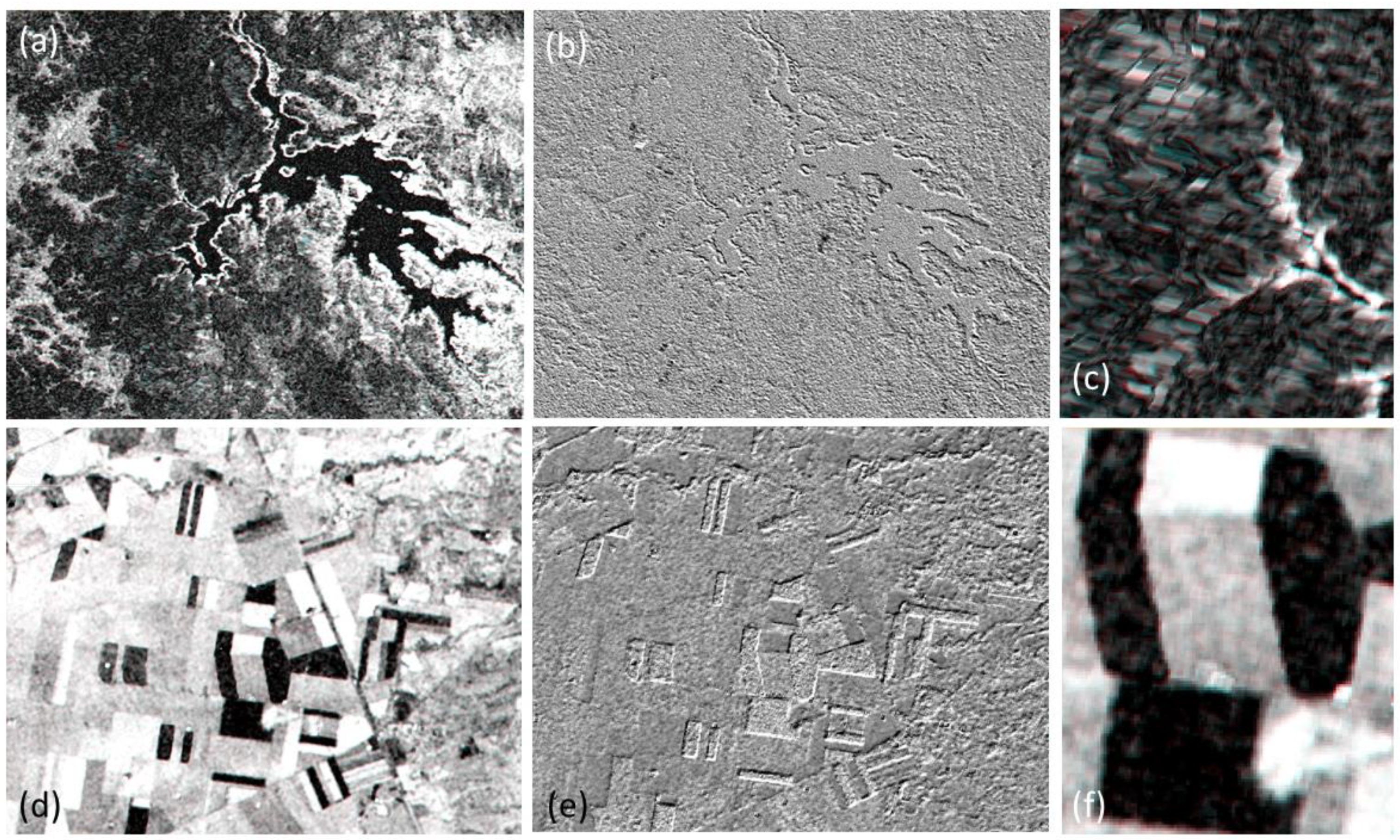
2.2. Demonstration of SAR ARD Products
3. Assessment of Suitability of SNAP Toolbox for Australian SAR Data Cube Applications
- -
- Test how well the SNAP processing software compares to the proprietary GAMMA software (often considered to be one of the most reputable and industry best SAR software) when producing Sentinel-1 γ0 backscatter.
- -
- Compare how the standard SRTM DEM available in the SNAP processing software (referred to as the SRTM_DEM) and the refined, Australia-wide DEM (referred to as the GA_DEM [31]) influence γ0 backscatter.
- -
- Compare γ0 backscatter from SNAP and GAMMA in an area of relatively steep topography and an area of relatively flat terrain.
- -
- Compare the effects of look angle from a far-range and near-range image over the same area on the Sentinel-1 γ0 backscatter.
- -
- Evaluate the absolute geometric accuracy of the γ0 images based on the location of a corner reflector within a scene.
- -
- Compare the interferometric coherence ARD product generated from SNAP to the one generated from GAMMA.
- -
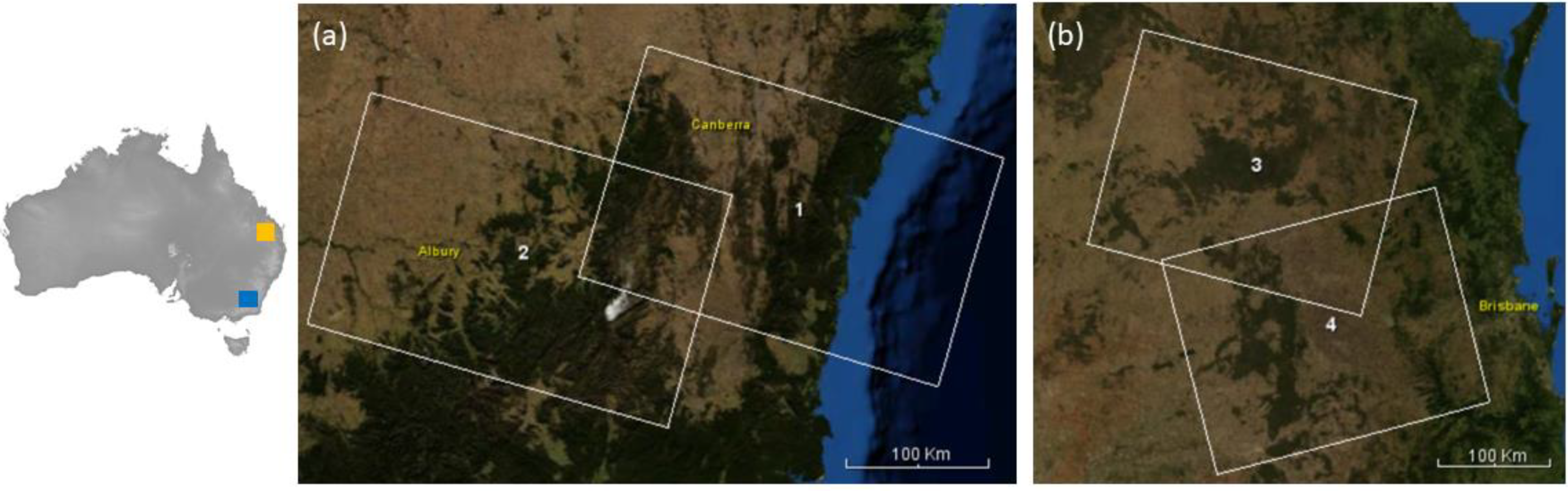
- Lake Eucumbene (Figure 3a), an area in the alpine region of southeast Australia containing relatively steep topography (height differences of ~1120 to 1550 m AHD) where the orbit paths overlap to give a near- and far-range image; and
- -
- The Surat Basin (Figure 3b), a topographically flat (height differences of ~320 to 480 m AHD) dryland agricultural area in eastern Australia. This site is also used for radiometric and geometric calibration of SAR satellites including the Sentinel-1 constellation, through a permanent corner reflector array deployed there [32].
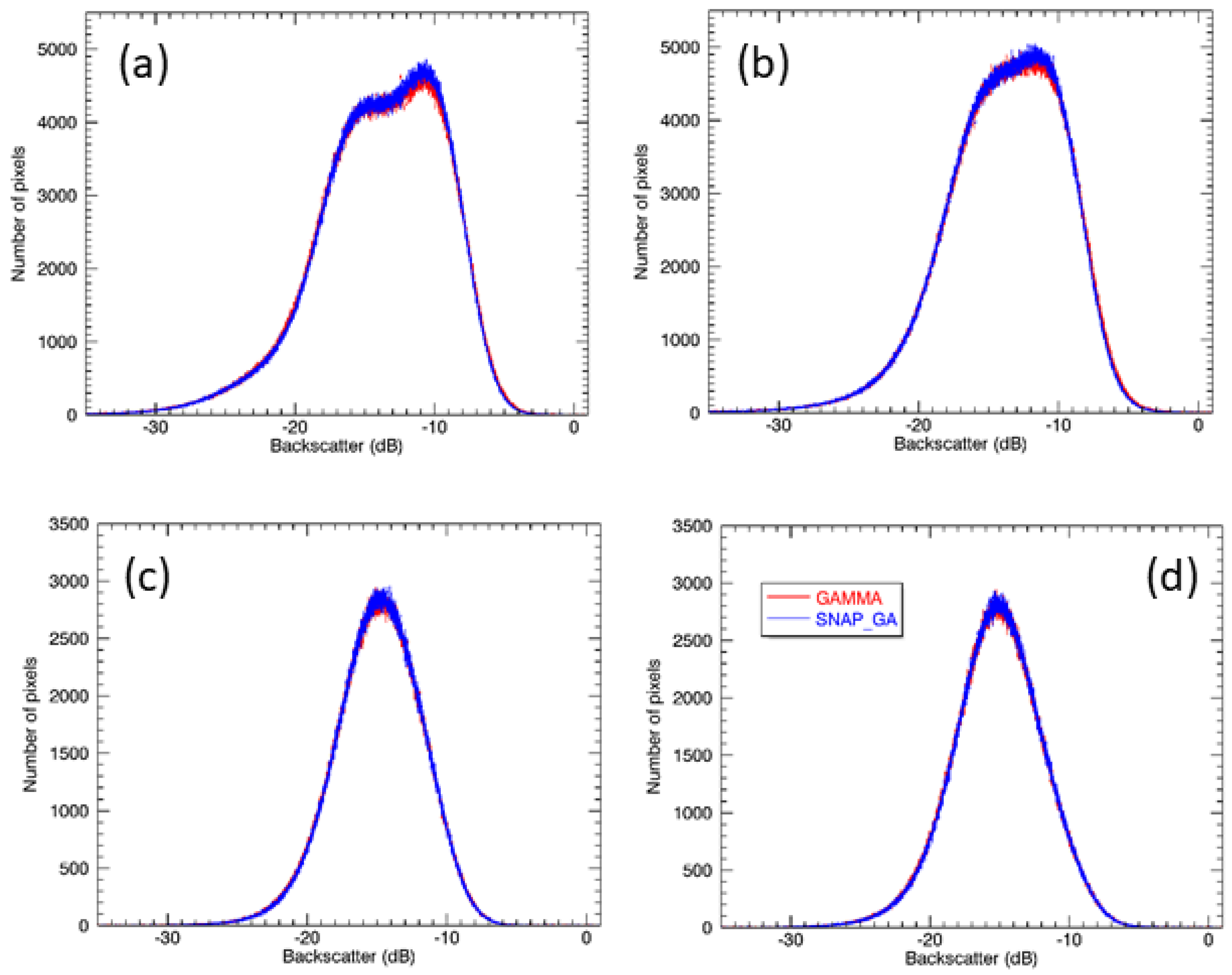
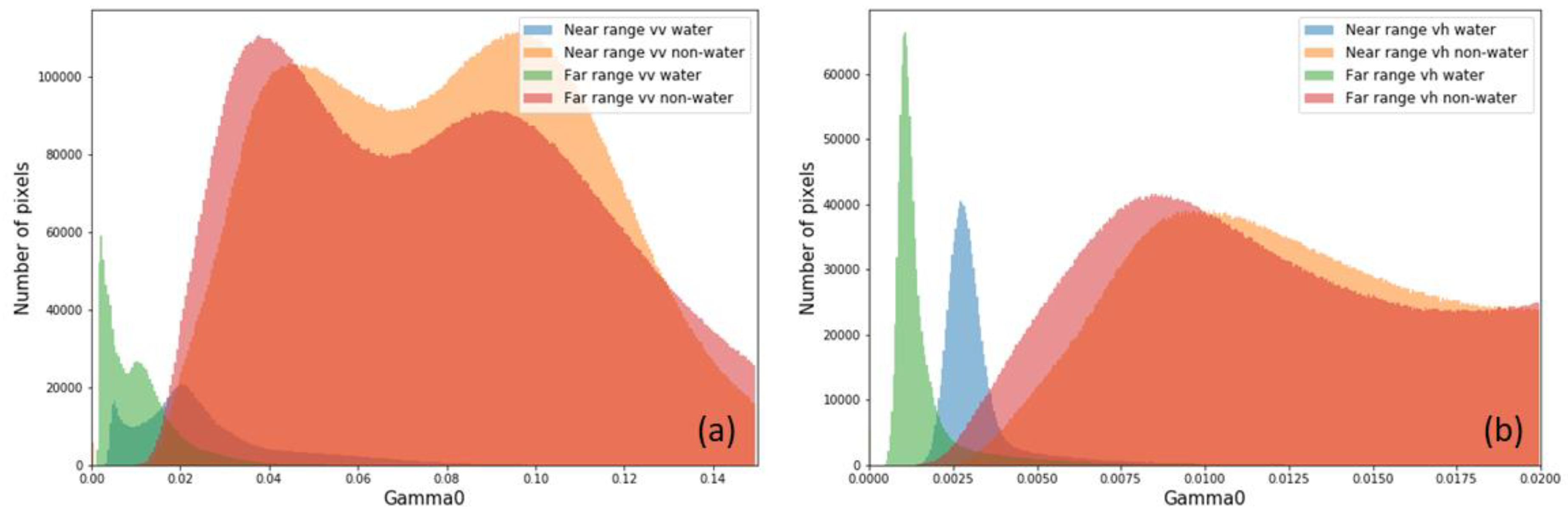
3.1. Comparison of SNAP and GAMMA Output for Radar Backscatter
3.2. Comparison of SNAP Output Using SRTM_DEM and GA_DEM for Radar Backscatter
3.3. Comparison of Near-Range and Far-Range Effects for Radar Backscatter
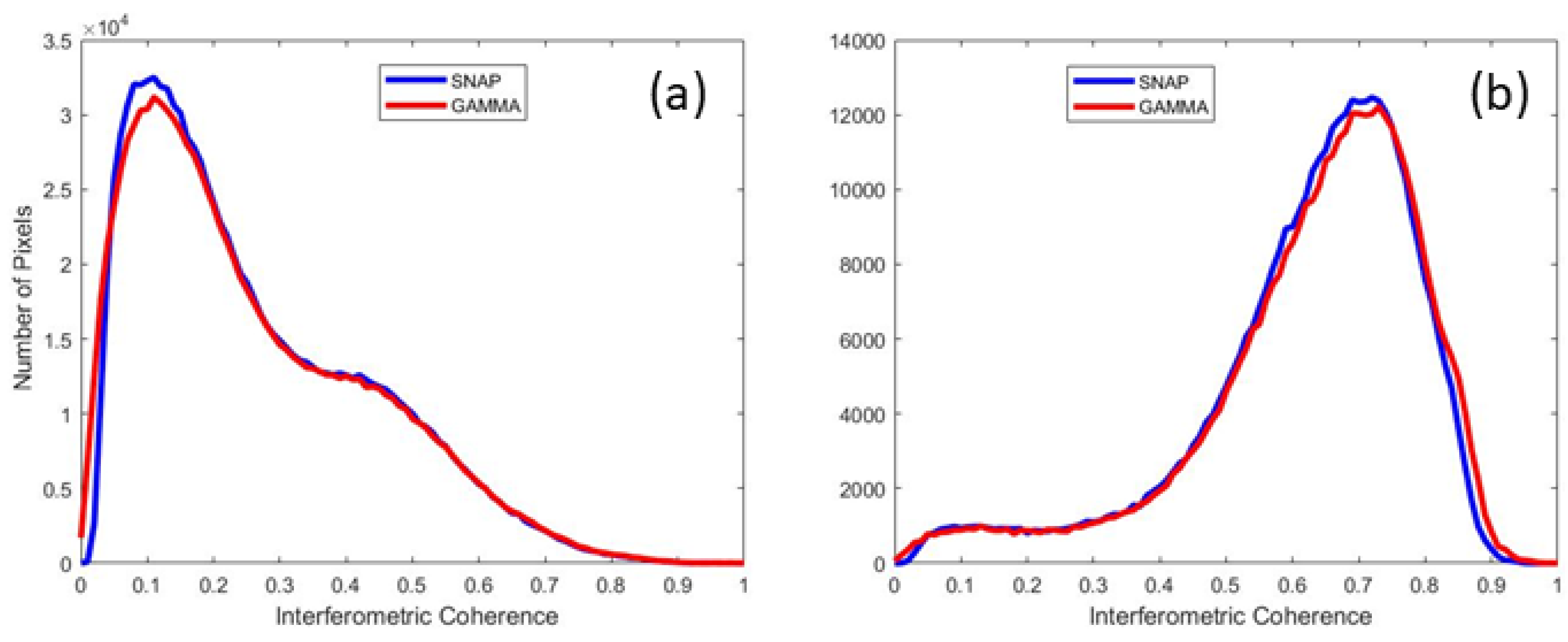
3.4. Comparison of SNAP and GAMMA Output for Interferometric Coherence
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Reiche, J.; Lucas, R.; Mitchell, A.L.; Verbesselt, J.; Hoekman, D.H.; Haarpaintner, J.; Kellndorfer, J.M.; Rosenqvist, A.; Lehmann, E.A.; Woodcock, C.E.; et al. Combining satellite data for better tropical forest monitoring. Nat. Clim. Chang. 2016, 6, 120–122. [Google Scholar] [CrossRef]
- European Space Agency (ESA) Sentinel Online–Sentinel-1. Available online: https://sentinels.copernicus.eu/web/sentinel/missions/sentinel-1 (accessed on 28 April 2019).
- Geoscience Australia Digital Earth Australia. Available online: http://www.ga.gov.au/about/projects/geographic/digital-earth-australia (accessed on 28 April 2019).
- OpenDataCube–An Open Source Geospatial Data Management & Analysis Platform. Available online: https://www.opendatacube.org/ (accessed on 28 April 2019).
- Committee on Earth Observation Satellites–CEOS Analysis Ready Data. Available online: http://ceos.org/ard/ (accessed on 28 April 2019).
- Copernicus Australasia. Commonwealth of Australia. Available online: http://www.copernicus.gov.au/ (accessed on 28 April 2019).
- Lehmann, E.A.; Caccetta, P.; Lowell, K.E.; Mitchell, A.; Zhou, Z-S.; Held, A.; Milne, T.; Tapley, I. SAR and optical remote sensing: assessment of interoperability and complementarity in the context of a large-scale operational forest monitoring system. Remote Sens. Environ. 2015, 156, 335–348. [Google Scholar] [CrossRef]
- Zhou, Z-S.; Caccetta, P.; Devereux, D.; Caccetta, M.; Woodcock, R.; Paget, M.; Held, A. Preparation of analysis ready POLSAR data for the Australian Geoscience Data Cube. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar] [CrossRef]
- Gamma Remote Sensing. Gamma Remote Sensing—GAMMA Software. Available online: http://www.gamma-rs.ch/software (accessed on 28 April 2019).
- Earth Online, Radar Course 2. European Space Agency. Available online: https://earth.esa.int/web/guest/missions/esa-operational-eo-missions/ers/instruments/sar/applications/radar-courses/content-2/-/asset_publisher/qIBc6NYRXfnG/content/radar-course-2-parameters-affecting-radar-backscatter (accessed on 20 March 2019).
- Lucas, R.M.; Mitchell, A.L.; Rosenqvist, A.; Proisy, C.; Melius, A.; Ticehurst, C. The potential of L-band SAR for quantifying mangrove characteristics and change: Case studies from the tropics. Aquat. Conserv. Mar. Freshw. Ecosyst. 2007, 17, 245–264. [Google Scholar] [CrossRef]
- Quegan, S.; Le Toan, T.; Chave, J.; Dall, J.; Exbrayat, J-F.; Ho Tong Minh, D.; Lomas, M.; D-Alessandro, M.M.; Paillou, P.; Papathanassiou, K.; et al. The European Space Agency BIOMASS mission: Measuring forest above-ground biomass from space. Remote Sens. Environ. 2019, 227, 44–60. [Google Scholar] [CrossRef] [Green Version]
- Smith, L. Satellite remote sensing of river inundation area, stage, and discharge: A review. Hydrol. Process. 1997, 11, 1427–1439. [Google Scholar] [CrossRef]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P.; Ludwig, R. SAR-based detection of flooded vegetation–review of characteristics and approaches. Int. J. Remote Sens. 2018, 39, 2255–2293. [Google Scholar] [CrossRef]
- Bouvet, A.; Mermoz, S.; Ballère, M.; Koleck, T.; Le Toan, T. Use of the SAR shadowing effect for deforestation detection with Sentinel-1 time series. Remote Sens. 2018, 10, 1250–1268. [Google Scholar] [CrossRef]
- Lohberger, S.; Stängel, M.; Atwood, E.C.; Siegert, F. Spatial evaluation of Indonesia’s 2015 fire-affected area and estimated carbon emissions using Sentinel-1. Glob. Chang. Biol. 2017, 24, 644–654. [Google Scholar] [CrossRef] [PubMed]
- Gao, Q.; Zribi, M.; Escorihuela, M.J.; Baghdadi, N.; Segui, P.Q. Irrigation Mapping Using Sentinel-1 Time Series at Field Scale. Remote Sens. 2018, 10, 1495–1512. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics To Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Cloude, S.R. The dual polarisation Entropy/alpha decomposition: A PALSAR case study. In Proceedings of the dual polarisation Entropy/alpha decomposition: A PALSAR case study, Frascati, Italy, 22–26 January 2007. [Google Scholar]
- Plank, S. Rapid damage assessment by means of multi-temporal SAR—A comprehensive review and outlook to Sentinel-1. Remote Sens. 2014, 6, 4870–4906. [Google Scholar] [CrossRef]
- SinCohMap–Sentinel-1 Interferometric Coherence for Vegetation and Mapping. Available online: http://www.sincohmap.org/ (accessed on 28 April 2019).
- Tamm, T.; Zalite, K.; Voomansik, K.; Talgre, L. Relating Sentinel-1 Interferometric Coherence to mowing events on grasslands. Remote Sens. 2016, 8, 802–820. [Google Scholar] [CrossRef]
- GitHub. Opendatacube/radar. Available online: https://github.com/opendatacube/radar (accessed on 28 April 2019).
- Commonwealth of Australia SARA Sentinel Australasia Regional Access. Available online: https://copernicus.nci.org.au/sara.client/#/home (accessed on 28 April 2019).
- NCI. National Computational Infrastructure. 2019. Available online: http://nci.org.au/ (accessed on 28 April 2019).
- De Zan, F.; Guarnieri, A.M. TOPSAR: Terrain Observation by Progressive Scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]
- Analysis Ready Data for Land–Normalised Radar Backscatter. Committee on Earth Observation Satellites. Available online: http://ceos.org/ard/files/CARD4L_Product_Specification-Backscatter-v3.2.pdf (accessed on 4 April 2019).
- Small, D. Flattening Gamma: Radiometric Terrain Correction for SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3081–3093. [Google Scholar] [CrossRef]
- European Space Agency (ESA) Sentinel Online–Data Products. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-1/data-products (accessed on 28 April 2019).
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, M.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophy. 2007, 45. [Google Scholar] [CrossRef]
- Gallant, J.C.; Dowling, T.I.; Read, A.M.; Wilson, N.; Tickel, P.; Inskeep, C. 1 second SRTM Derived Digital Elevation Models User Guide. 2011; Geoscience Australia. Available online: www.ga.gov.au/topographic-mapping/digital-elevation-data.html (accessed on 28 April 2019).
- Garthwaite, M.C.; Nancarrow, S.; Hislop, A.; Thankappan, M.; Dawson, J.H.; Lawrie, S. Design of Radar Corner Reflectors for the Australian Geophysical Observing System. Geosci. Aust. 2015, 3. [Google Scholar] [CrossRef]
- Mueller, N.; Lewis, A.; Roberts, D.; Ring, S.; Melrose, R.; Sixsmith, J.; Lymburner, L.; McIntyre, A.; Tan, P.; Curnow, S.; et al. Water observations from space: Mapping surface water from 25 years of Landsat imagery across Australia. Remote Sens. Environ. 2016, 174, 341–352. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filename | Ascending/Descending | Date | Look Angle | Polarization | Site Name |
|---|---|---|---|---|---|
| S1A_IW_GRDH_1SDV_20190110T191608_ | Descending | 1 Janurary 2019 | Far range | VV | Lake Eucumbene |
| 20190110T191633_025419_02D0D3_9C65.zip | |||||
| S1A_IW_GRDH_1SDV_20190115T192426_ | Descending | 15 Janurary 2019 | Near range | VV | Lake Eucumbene |
| 20190115T192451_025492_02D371_B5AA.zip | |||||
| S1B_IW_GRDH_1SDV_20180911T192100_ | Descending | 11 September 2018 | Mid range | VV | Surat Basin |
| 20180911T192129_012671_01761D_377D.zip | |||||
| S1B_IW_GRDH_1SSH_20180916T083200_ | Ascending | 16 September 2018 | Mid range | HH | Surat Basin |
| 20180916T083229_012737_017833_7C98.zip |
| Filename | Ascending/ Descending | Date | Look Angle | Polarization | Site Name |
|---|---|---|---|---|---|
| S1A_IW_SLC__1SDV_20190115T192425_20190115T192452_025492_02D371_101B.zip | Descending | 15 January 2019 | Near range | VV | Lake Eucumbene |
| S1A_IW_SLC__1SDV_20190127T192425_20190127T192452_025667_02D9DB_A9BD.zip | Descending | 27 Janurary 2019 | Near range | VV | Lake Eucumbene |
| S1B_IW_SLC__1SDV_20180911T192100_20180911T192130_012671_01761D_7DDC.zip | Descending | 11 September 2019 | Near range | VV | Surat Basin |
| S1B_IW_SLC__1SDV_20180923T192100_20180923T192130_012846_01_B7E_7767.zip | Descending | 23 September 2019 | Near range | VV | Surat Basin |
| Comparison | Study Site | Look Angle | Mean | Standard Deviation |
|---|---|---|---|---|
| GAMMA–SNAP | Lake Eucumbene | Far range | −0.2 × 10−3 | 0.04 |
| Lake Eucumbene | Near range | 1.3 × 10−3 | 0.03 | |
| Surat | Mid range | −0.01 × 10−3 | 0.01 | |
| Surat HH | Mid range | −0.13 × 10−3 | 0.03 |
| Comparison | Study Site | Look Angle | Mean | Standard Deviation |
|---|---|---|---|---|
| SRTM–GA DEM | Lake Eucumbene | Far range | 0.09 × 10−3 | 0.03 |
| Lake Eucumbene | Near range | 0.07 × 10−3 | 0.04 | |
| Surat | Mid range | −0.1 × 10−3 | 0.01 | |
| Surat HH | Mid range | 0.08 × 10−3 | 0.01 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ticehurst, C.; Zhou, Z.-S.; Lehmann, E.; Yuan, F.; Thankappan, M.; Rosenqvist, A.; Lewis, B.; Paget, M. Building a SAR-Enabled Data Cube Capability in Australia Using SAR Analysis Ready Data. Data 2019, 4, 100. https://doi.org/10.3390/data4030100
Ticehurst C, Zhou Z-S, Lehmann E, Yuan F, Thankappan M, Rosenqvist A, Lewis B, Paget M. Building a SAR-Enabled Data Cube Capability in Australia Using SAR Analysis Ready Data. Data. 2019; 4(3):100. https://doi.org/10.3390/data4030100
Chicago/Turabian StyleTicehurst, Catherine, Zheng-Shu Zhou, Eric Lehmann, Fang Yuan, Medhavy Thankappan, Ake Rosenqvist, Ben Lewis, and Matt Paget. 2019. "Building a SAR-Enabled Data Cube Capability in Australia Using SAR Analysis Ready Data" Data 4, no. 3: 100. https://doi.org/10.3390/data4030100
APA StyleTicehurst, C., Zhou, Z. -S., Lehmann, E., Yuan, F., Thankappan, M., Rosenqvist, A., Lewis, B., & Paget, M. (2019). Building a SAR-Enabled Data Cube Capability in Australia Using SAR Analysis Ready Data. Data, 4(3), 100. https://doi.org/10.3390/data4030100