
Molecular Simulation and Theoretical Analysis of Slide-Ring Gels under Biaxial Deformation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results and Discussion
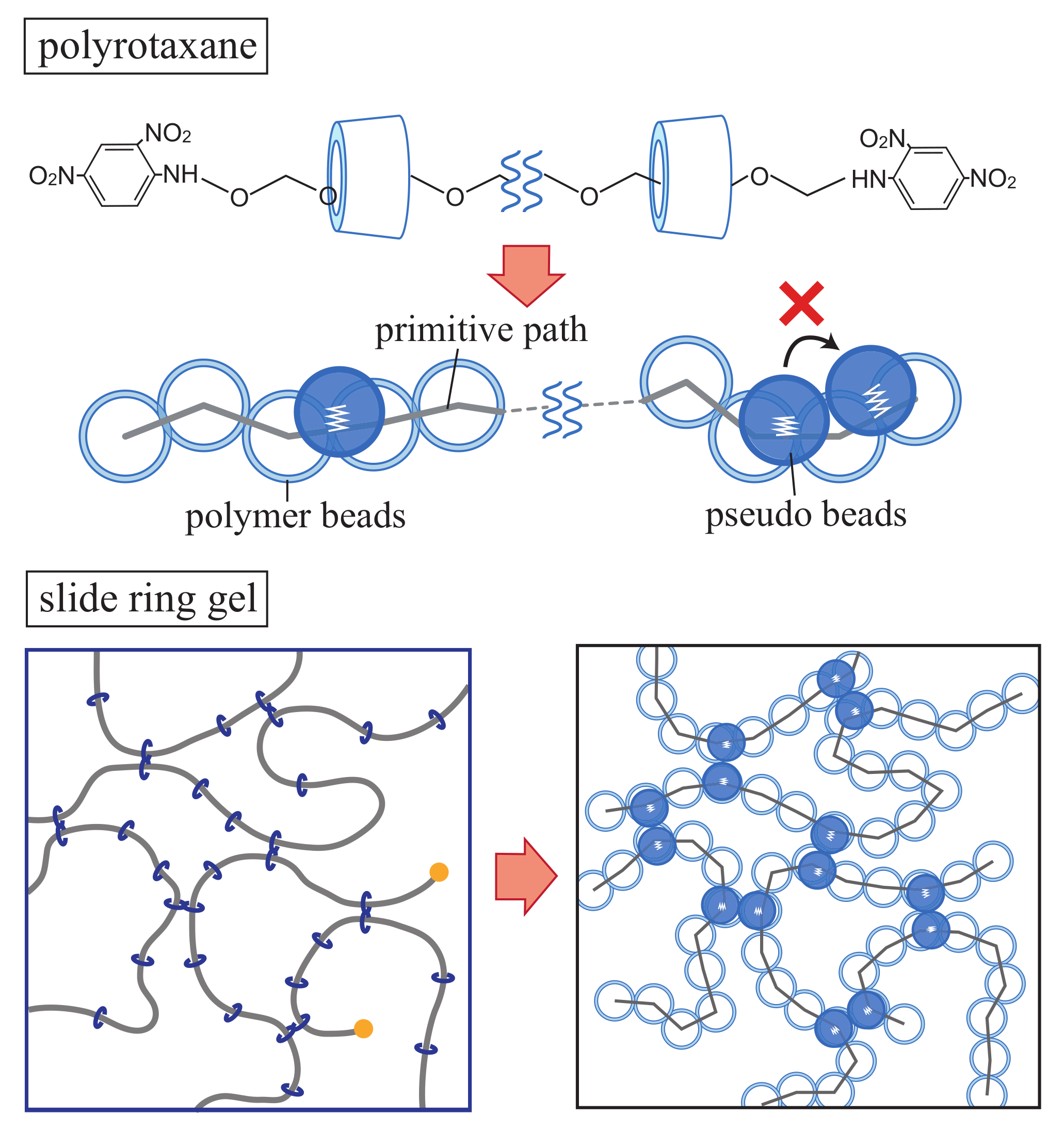
2.1. Molecular Simulations
2.1.1. Model
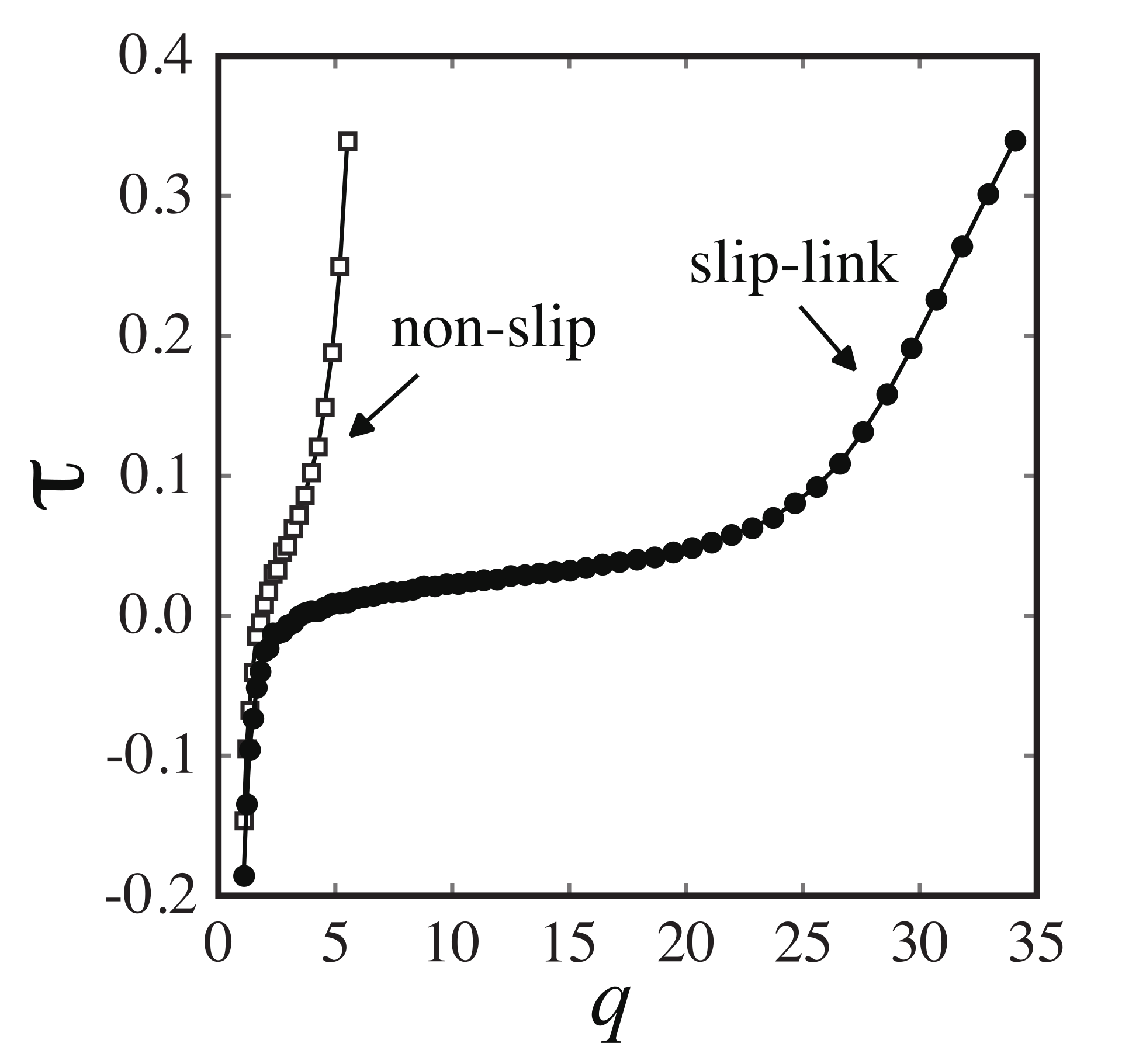
2.1.2. Results
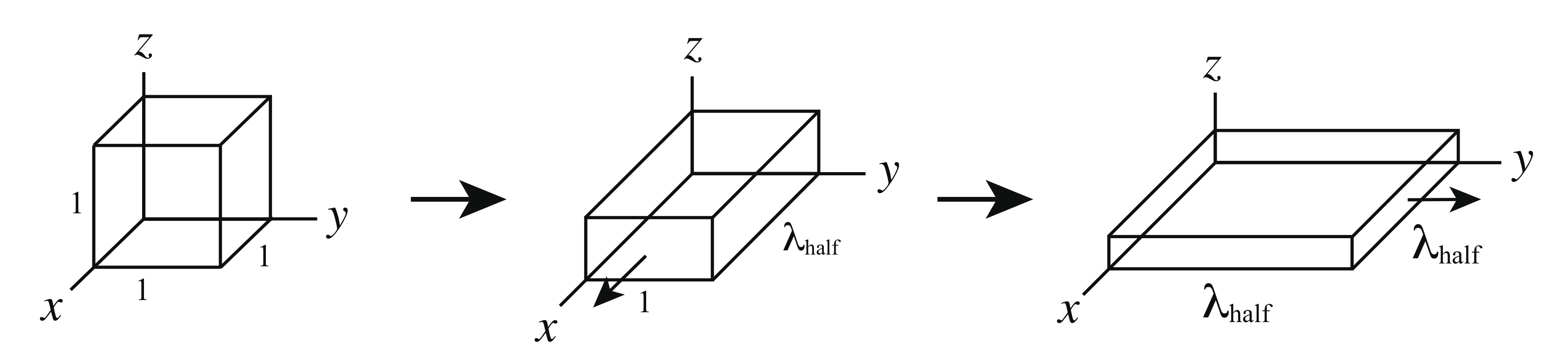
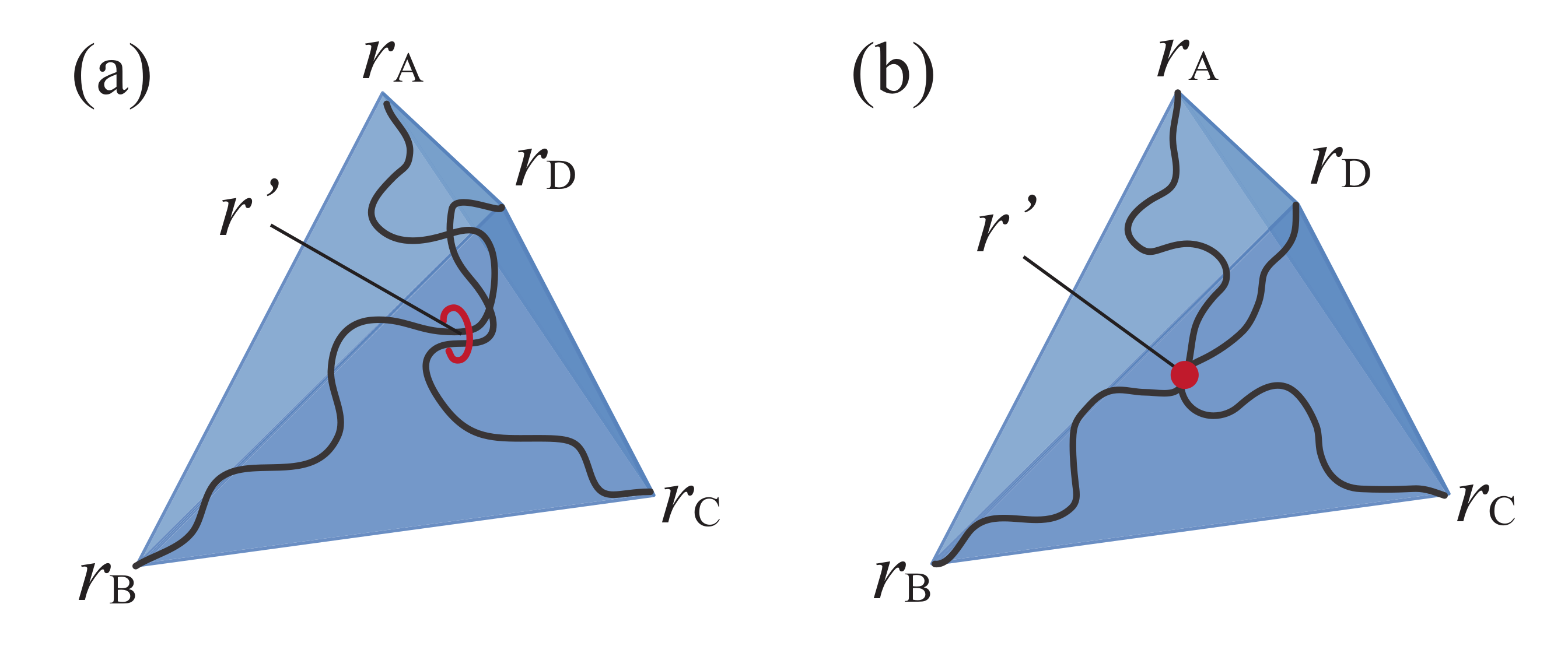
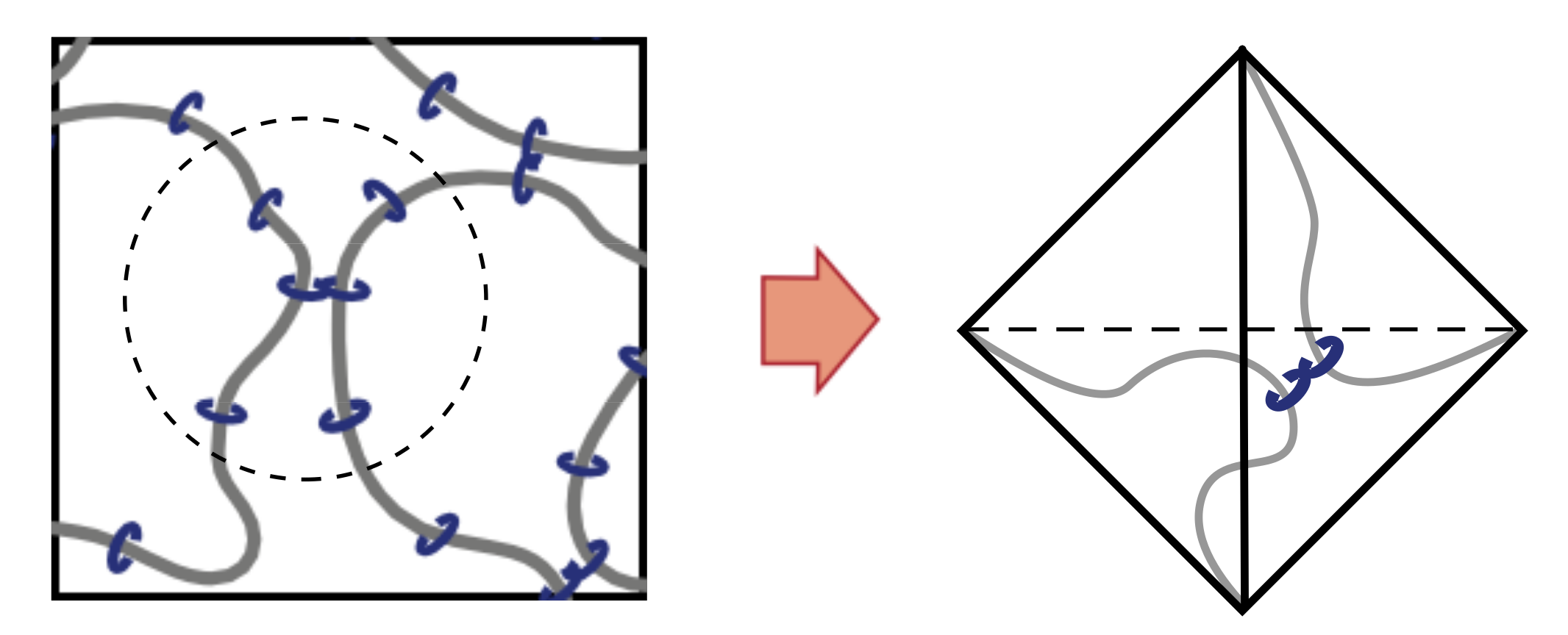
2.2. Tetrahedral Model with Gaussian Chain
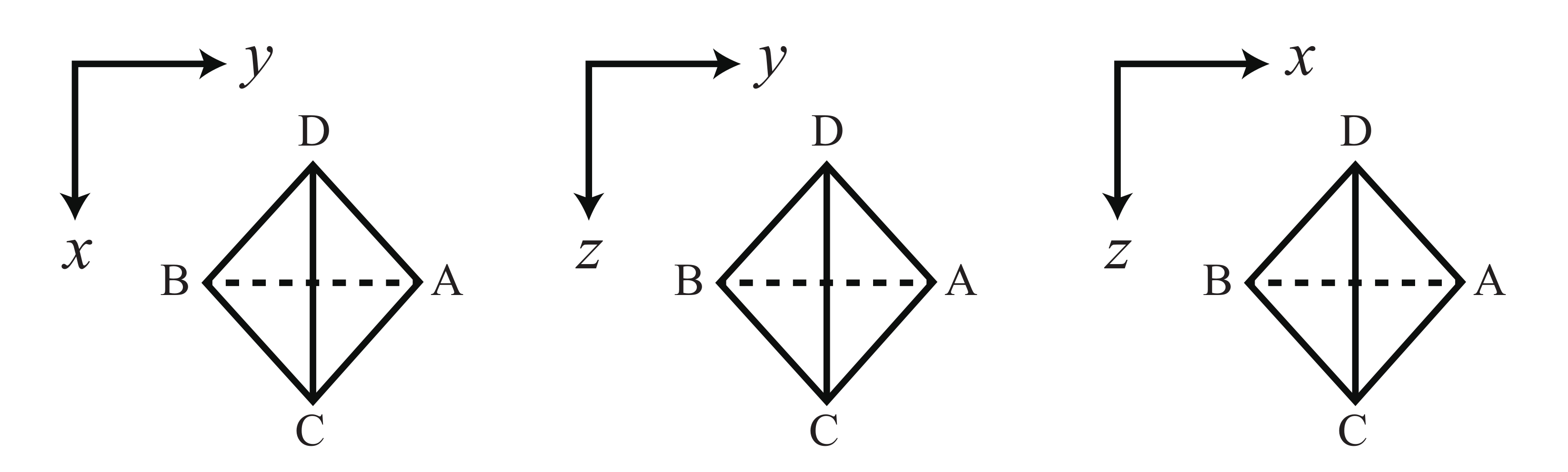
2.2.1. Model
- the edge (A, B) and the edge (C, D) are parallel to z and y-axis respectively.
- the edge (A, B) and the edge (C, D) are parallel to z and x-axis respectively.
- the edge (A, B) and the edge (C, D) are parallel to x and y-axis respectively.
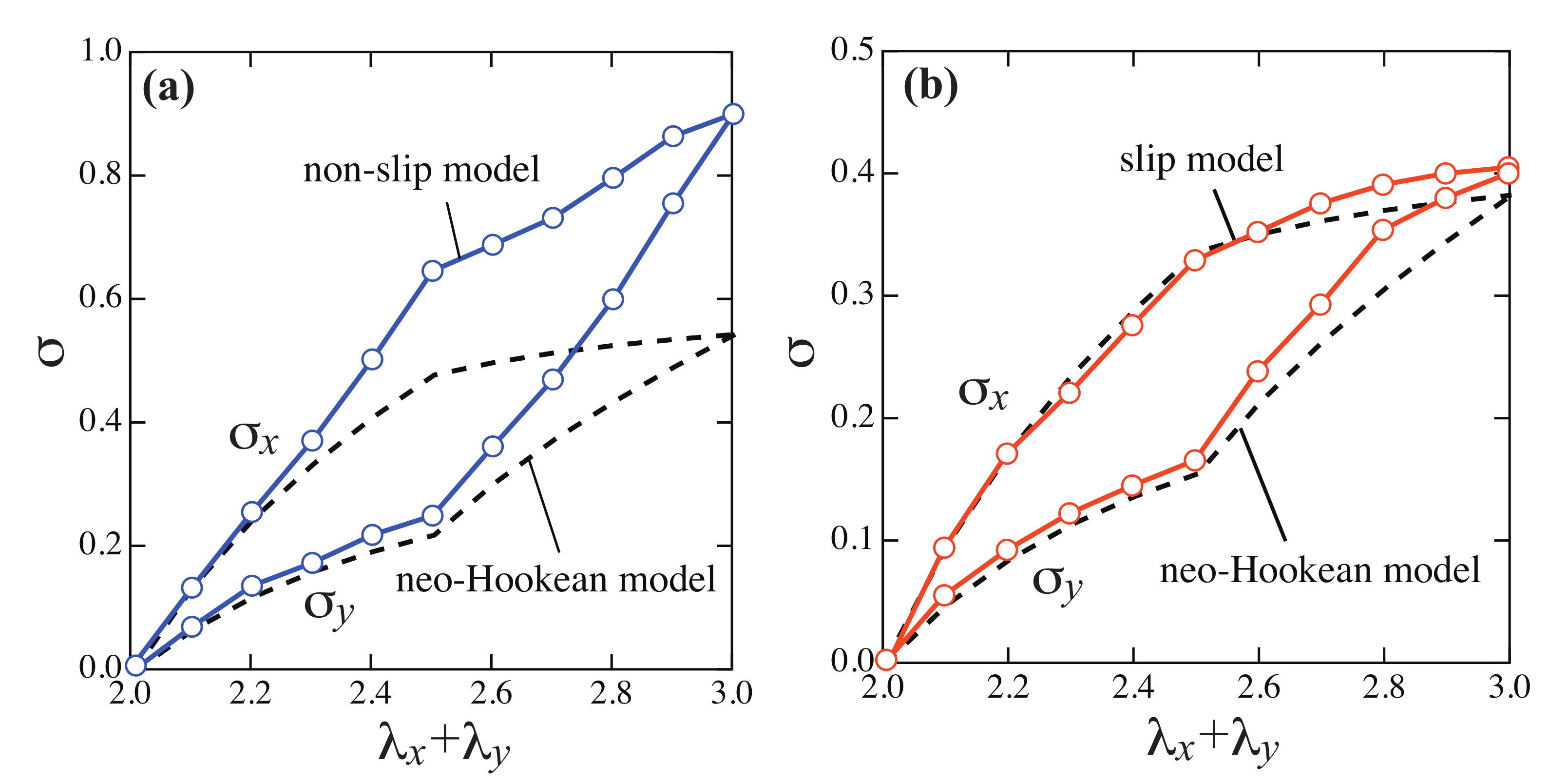
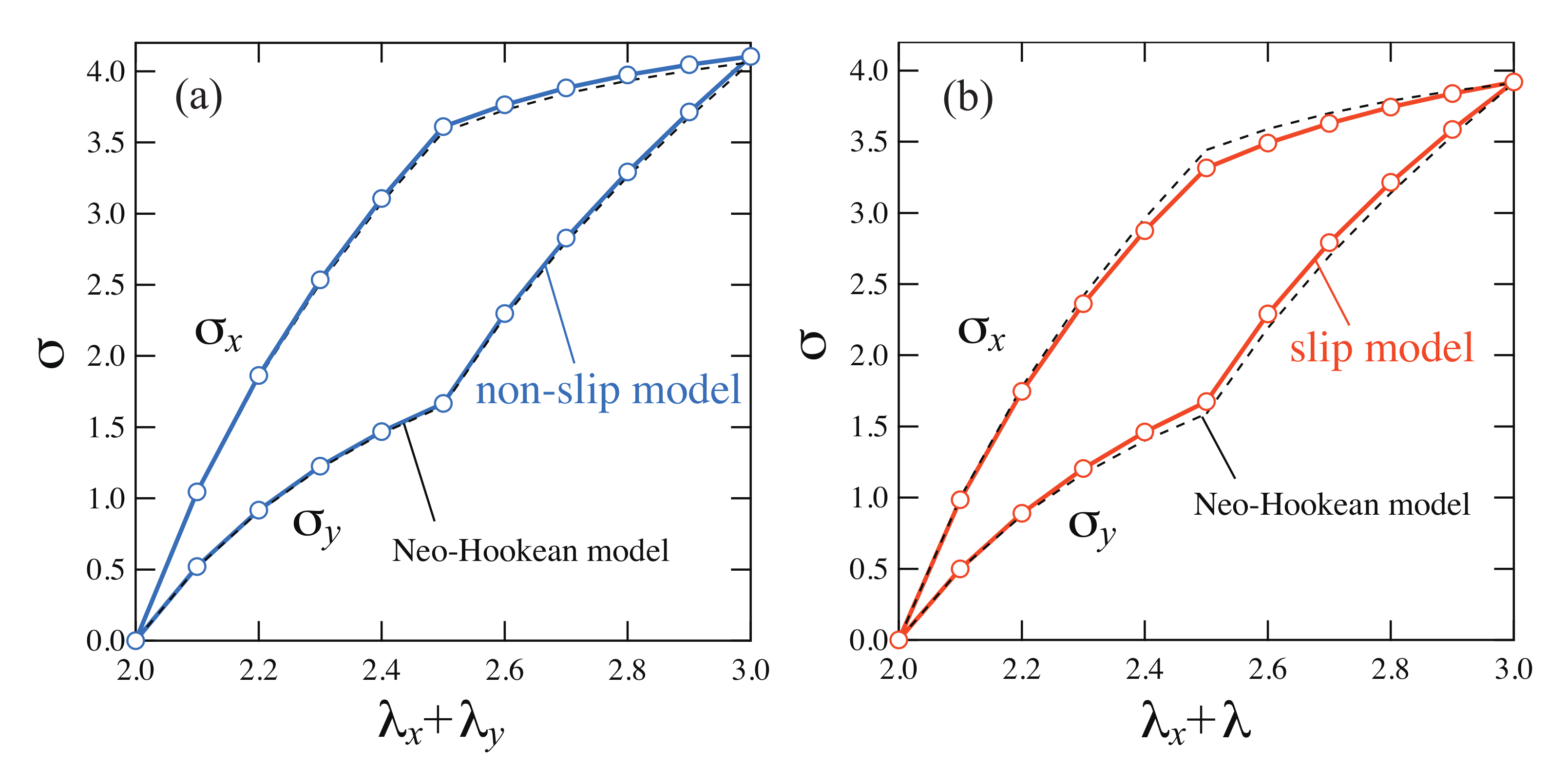
2.2.2. Results
2.3. Tetrahedral Model with Langevin Chain
2.3.1. Model
2.3.2. Results
3. Conclusions
4. Methods
Molecular Simulation
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Okumura, Y.; Ito, K. The polyrotaxane gel: A topological gel by figure-of-eight cross-links. Adv. Mater. 2001, 13, 485–487. [Google Scholar] [CrossRef]
- Harada, A. Polyrotaxanes. Acta. Polym. 1998, 49, 3–17. [Google Scholar] [CrossRef]
- Furuya, T.; Koga, T. Theoretical study of inclusion complex formation of cyclodextrin and single polymer chain. Polymer 2017, 131, 193–201. [Google Scholar] [CrossRef]
- Ito, K. Novel cross-linking concept of polymer network: Synthesis, structure, and properties of slide-ring gels with freely movable junctions. Polym. J. 2007, 39, 489–499. [Google Scholar] [CrossRef]
- Murata, N.; Konda, A.; Urayama, K.; Takigawa, T.; Kidowaki, M.; Ito, K. Anomaly in stretching-induced swelling of slide-ring gels with movable cross-links. Macromolecules 2009, 42, 8485–8491. [Google Scholar] [CrossRef]
- Kato, K.; Ito, K. Dynamic transition between rubber and sliding states attributed to slidable cross-links. Soft Matter 2011, 7, 8737–8740. [Google Scholar] [CrossRef]
- Kato, K.; Yasuda, T.; Ito, K. Viscoelastic properties of slide-ring gels reflecting sliding dynamics of partial chains and entropy of ring components. Macromolecules 2012, 46, 310–316. [Google Scholar] [CrossRef]
- Kato, K.; Ito, K. Polymer networks characterized by slidable crosslinks and the asynchronous dynamics of interlocked components. React. Funct. Polym. 2013, 73, 405–412. [Google Scholar] [CrossRef]
- Mayumi, K.; Liu, C.; Ito, K. Mechanical and Fracture Properties of Dynamically Cross-Linked Polymer Gels and Elastomers with Molecular Necklaces. Nihon Reoroji Gakkaishi 2019, 47, 43–49. [Google Scholar] [CrossRef]
- Liu, C.; Kadono, H.; Mayumi, K.; Kato, K.; Yokoyama, H.; Ito, K. Unusual fracture behavior of slide-ring gels with movable cross-links. ACS Macro Lett. 2017, 6, 1409–1413. [Google Scholar] [CrossRef]
- Liu, C.; Mayumi, K.; Hayashi, K.; Jiang, L.; Yokoyama, H.; Ito, K. Direct Observation of Large Deformation and Fracture Behavior at the Crack Tip of Slide-Ring Gel. J. Electrochem. Soc. 2019, 166, B3143. [Google Scholar] [CrossRef]
- Ball, R.; Doi, M.; Edwards, S.; Warner, M. Elasticity of entangled networks. Polymer 1981, 22, 1010–1018. [Google Scholar] [CrossRef]
- Edwards, S.; Vilgis, T. The effect of entanglements in rubber elasticity. Polymer 1986, 27, 483–492. [Google Scholar] [CrossRef]
- De Gennes, P.G. Sliding gels. Phys. A Stat. Mech. Appl. 1999, 271, 231–237. [Google Scholar] [CrossRef]
- Koga, T.; Tanaka, F. Elastic properties of polymer networks with sliding junctions. Eur. Phys. J. E Soft Matter Biol. Phys. 2005, 17, 225–229. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Hou, G.; Shen, J.; Liu, J.; Gao, Y.; Zhao, X.; Zhang, L. Designing the Slide-Ring Polymer Network with both Good Mechanical and Damping Properties via Molecular Dynamics Simulation. Polymers 2018, 10, 964. [Google Scholar] [CrossRef] [Green Version]
- Kawamura, T.; Urayama, K.; Kohjiya, S. Multiaxial deformations of end-linked poly (dimethylsiloxane) networks. 1. Phenomenological approach to strain energy density function. Macromolecules 2001, 34, 8252–8260. [Google Scholar] [CrossRef]
- Urayama, K. An experimentalist’s view of the physics of rubber elasticity. J. Polym. Sci. Part B Polym. Phys. 2006, 44, 3440–3444. [Google Scholar] [CrossRef]
- Bitoh, Y.; Akuzawa, N.; Urayama, K.; Takigawa, T. Strain energy function of swollen polybutadiene elastomers studied by general biaxial strain testing. J. Polym. Sci. Part B Polym. Phys. 2010, 48, 721–728. [Google Scholar] [CrossRef]
- Bitoh, Y.; Akuzawa, N.; Urayama, K.; Takigawa, T.; Kidowaki, M.; Ito, K. Peculiar nonlinear elasticity of polyrotaxane gels with movable cross-links revealed by multiaxial stretching. Macromolecules 2011, 44, 8661–8667. [Google Scholar] [CrossRef]
- Yohsuke, B.; Urayama, K.; Takigawa, T.; Ito, K. Biaxial strain testing of extremely soft polymer gels. Soft Matter 2011, 7, 2632–2638. [Google Scholar] [CrossRef]
- Kondo, Y.; Urayama, K.; Kidowaki, M.; Mayumi, K.; Takigawa, T.; Ito, K. Applicability of a particularly simple model to nonlinear elasticity of slide-ring gels with movable cross-links as revealed by unequal biaxial deformation. J. Chem. Phys. 2014, 141, 134906. [Google Scholar] [CrossRef] [PubMed]
- Treloar, L.R.G. The Physics of Rubber Elasticity; Oxford University Press: Oxford, UK, 1975. [Google Scholar]
- Kremer, K.; Grest, G.S. Dynamics of entangled linear polymer melts: A molecular-dynamics simulation. J. Chem. Phys. 1990, 92, 5057–5086. [Google Scholar] [CrossRef]
- Koga, T.; Tanaka, F.; Kaneda, I.; Winnik, F.M. Stress buildup under start-up shear flows in self-assembled transient networks of telechelic associating polymers. Langmuir 2009, 25, 8626–8638. [Google Scholar] [CrossRef] [PubMed]
- Miquelard-Garnier, G.; Creton, C.; Hourdet, D. Strain induced clustering in polyelectrolyte hydrogels. Soft Matter 2008, 4, 1011–1023. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Graessley, W.W.; Pearson, D.S. Stress–strain behavior in polymer networks containing nonlocalized junctions. J. Chem. Phys. 1977, 66, 3363–3370. [Google Scholar] [CrossRef]
- Flory, P.J.; Rehner, J., Jr. Statistical Mechanics of Cross-Linked Polymer Networks I. Rubberlike Elasticity. J. Chem. Phys. 1943, 11, 512–520. [Google Scholar] [CrossRef]
- Katsuno, C.; Konda, A.; Urayama, K.; Takigawa, T.; Kidowaki, M.; Ito, K. Pressure-Responsive Polymer Membranes of Slide-Ring Gels with Movable Cross-Links. Adv. Mater. 2013, 25, 4636–4640. [Google Scholar] [CrossRef]
- Verlet, L. Computer “experiments” on classical fluids. I. Thermodynamical properties of Lennard-Jones molecules. Phys. Rev. 1967, 159, 98. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanahashi, K.; Koga, T. Molecular Simulation and Theoretical Analysis of Slide-Ring Gels under Biaxial Deformation. Gels 2021, 7, 129. https://doi.org/10.3390/gels7030129
Tanahashi K, Koga T. Molecular Simulation and Theoretical Analysis of Slide-Ring Gels under Biaxial Deformation. Gels. 2021; 7(3):129. https://doi.org/10.3390/gels7030129
Chicago/Turabian StyleTanahashi, Kotaro, and Tsuyoshi Koga. 2021. "Molecular Simulation and Theoretical Analysis of Slide-Ring Gels under Biaxial Deformation" Gels 7, no. 3: 129. https://doi.org/10.3390/gels7030129
APA StyleTanahashi, K., & Koga, T. (2021). Molecular Simulation and Theoretical Analysis of Slide-Ring Gels under Biaxial Deformation. Gels, 7(3), 129. https://doi.org/10.3390/gels7030129