1. Introduction
Ships and offshore structures are exposed to the sea, limiting the scope of application of offshore operations, from efficient and economic offshore operations in moderate sea states to reliability as well as survival in extreme wave conditions. To classify offshore operating conditions, predefined limiting criteria such as absolute or relative motions are typically combined with a limiting characteristic wave height or sea state based on stochastic analysis in the design process, allowing identifying feasible and infeasible sea states, respectively. Typically, these limiting sea states are further reduced in terms of allowable significant wave heights by insurer and surveyor of offshore operations. This approach limits the applicability of offshore operations strictly as most sea states (in particular in the transition area between feasible and infeasible region of a scatter diagram) will feature favourable wave sequences allowing short-term offshore operations which are elapsed unused. Knowing the future in terms of deterministic prediction of the encountering wave field and structure motion a sufficient time span in advance would allow reducing the downtime as the critical part of an offshore operation typically corresponds to a short time interval of the whole operation. In addition, a decision support system (DSS) based on deterministic wave prediction can also detect critical wave groups in pretended feasible sea states increasing the safety of complex operations. The impact of such a DSS on shipping as warning system (e.g., parametric roll, extreme wave events, extreme motions and structure response) should not be left unmentioned even though the focus may lie on offshore operations.
The established research on deterministic wave prediction comprises two indispensable constituents: sea state registration and wave prediction. The deterministic structure motion prediction based on the wave prediction is a further key element for a DSS but will not be discussed in detail within this paper. For the registration of the future encountering wave field, the surface elevation has to be measured at a certain distance from the prediction point (e.g., location of offshore operation). Different measurement methods are available, from point measurements (e.g., wave buoy) in time domain to surface elevation snapshots taken from the ship’s X-band radar in the space domain. As the focus of the paper lies on wave prediction exclusively, the following brief description of the sea state registration methods are only introduced in order to support the approach presented in this paper without any technical details.
Point measurements are disadvantageous compared to a surface elevation snapshot as a single point measurement cannot provide information regarding the directionality of the sea state. This problem may be solved by using a large array of several point measurement devices in order to identify the directionality of the wave components. However, as the availability of point measurement devices in the open ocean are generally limited, this approach would denote to install such an array prior to the offshore operation excluding a plug-and-play application. In addition, this approach is impractical for DSS of ships or offshore structures with forward speed. A further drawback is the principle of measurement as point measurements denote that the wave field is recorded at a fixed location over a specific time. As a consequence, the prediction time (time between the moment at which the prediction is available and the moment at which the predicted waves physically arrive at the prediction location) is reduced by the recording time, independently of the computational time needed for the used wave prediction method [
1,
2,
3,
4].
The ship’s X-band radars provide the surface elevation for domains of several square kilometres including information on directionality. Theoretically, the detected wave field can be available after every revolution of the radar antenna (<2 s), even though time is needed for the inversion of the radar clutter (due to the presence of the waves) to the wave field. In contrast to single point measurements, where a sufficient measuring time is needed for an accurate and sufficiently long prediction, this time lag is only limited by the numerical efficiency of the used algorithm. Unfortunately, the principle of measurements of X-band radars also yield a main drawback as the radar cannot detect wave troughs behind (steep) wave crests. Thus, the accuracy is dependent on the wave inversion algorithm. However, the advantages of using a ship’s X-band radar (plug-and-play, very fast wave registration over a large space domain, directionality of the wave field, and large prediction horizon) seems to outweigh the disadvantages as two commercial prediction systems are available from the companies Applied Physical Sciences Corporation (FutureWaves™ [
5]) and Next Ocean™ [
6]. Even this paper focusses on wave prediction exclusively, the presented research assumes surface elevation snapshots (taken continuously by a ship board radar at great distance ahead the operational area) as input for the deterministic wave prediction.
One principal point of the development process of deterministic wave prediction is the implementation of very fast algorithms to obtain the predicted wave field in a sufficient time span before the physical wave field arrives at the prediction location. Only a few methods are capable due to the contrary specifications of very fast calculation time and high accuracy at once. The fastest method but also simplest one is the linear theory, which has already been applied for wave prediction applications with promising findings [
2,
7,
8,
9,
10,
11,
12,
13,
14,
15]. A Shipboard Routing Assistance system (SRA) based on the continuous ship’s X-band radar measurements of the surrounding seaway were presented by Payer and Rathje [
7]. The linear evolution of continuously measured surface elevation snapshots using the ship’s X-band radar are also the basis for a decision support system for Computer Aided Ship Handling (CASH) developed by Clauss et al. [
8]. It was shown that this tool can predict the encountering wave field as well as the structure response fairly accurate for moderate long crested sea states. Later, Clauss et al. [
12] and Kosleck [
2] enhanced this tool to predict the short crested encountering wave field and the corresponding 6DOF motion. Tyson and Thornhill [
16,
17] applied linear wave prediction using WaMoS II™ on full scale tests evaluating the predictive skills of the linear methods. They showed that for short forecast duration and small to moderate wave steepness, the accuracy of the linear approach is sufficient. In addition, Naaijen and Huijsmans [
9,
11] as well as Naaijen et al. [
10,
15] applied linear wave evolution equations for real time wave prediction and ship motion estimation in long as well as short crested waves concluding “that a 60 s accurate forecast of wave elevation is very well feasible for all considered wave conditions and motion predictions are even more accurate”. Due to the simpleness and robustness, the linear approach is an integral part of commercially available prediction system (e.g., FutureWaves™ [
13,
14], Next Ocean™ [
6]).
However, the linear approach implies uncertainties due to its strong simplifications of the water wave problem. Non-linear effects become dominant with increasing wave steepness reducing the accuracy of the linear approach significantly. Non-linear methods enable advanced simulations with high accuracy but at the expense of computation time. One of the few non-linear and numerical efficient methods suitable for wave prediction are the so-called envelope equations of the NLSE framework [
18,
19,
20,
21]. Both the NLSE and the modified NLSE (MNLSE) were extensively experimentally and numerically investigated in terms of non-linear wave evolution (e.g., [
22,
23,
24,
25,
26] among others). Even if the NLSE captures relevant non-linear phenomena and provides good accuracy for sufficiently narrow spectra, it was generally shown that the NLSE is less suitable for the prediction of irregular sea states due to the spectral bandwidth constraint. The MNLSE on the other side provides significant better agreement due to the broadening of the bandwidth constraints (e.g., [
22,
23,
24,
25,
26]).
Ruban [
27] showed that the NLSE is suitable for the prediction of extreme waves applying the Gaussian variational ansatz to the NLSE in order to obtain a semi-quantitative prediction of non-linear spatio-temporal focussing. Farazmand and Sapsis [
28] presented a reduced-order prediction of rogue waves using MNLSE. Their procedure is based on the identification of elementary wave groups (EWG) assuming that critical EWGs do not interact with other EWGs within the short-term prediction. The measured irregular sea state is decomposed into EWGs and the evolution and amplitude growth of critical EWGs is determined by precomputed EWGs based on MNLSE. Thus, the numerical effort for the prediction of extreme events is reduced to the proper decomposition of the sea state and identification of the underlying, precomputed EWG. Cousins et al. [
29] showed a similar approach: a data-driven prediction scheme for the prediction on extreme events. This approach can also divided into two separate components. The first component provides the data base for the prediction of extreme events, is based on the MNLSE and can be applied prior any real world application. The basis are localized wave groups which are numerically evolved for varying amplitudes and periods resulting in specific group amplification factors. The second component is the real-time extreme wave predictor using field measurements. Within the measurements, coherent wave groups are to be identified and the future elevation is estimated from the data base. Again, the numerical effort is reduced to decomposition of the irregular wave sequence, identification of coherent wave groups, and resulting amplification.
The NLSE as well as MNLSE has also been used for deterministic wave prediction (e.g., [
26,
30]). Simanesew et al. [
30] applied both for the deterministic prediction of long- as well as short-crested sea states in time domain. They showed that both the NLS and MLSN provide sufficient accuracies in long-crested sea states for short forecast distances and horizons. For increasing directionality the quality of the forecast decreases significantly. Of particular note in this investigation is that the linear dispersion behaviour is captured exactly by using the dispersion operator introduced by Trulsen et al. ([
21]).
An alternative non-linear method for wave prediction is the numerically efficient high-order spectral method (HOSM) [
31,
32,
33]. Wu [
1] as well as Blondel et al. [
34] applied the HOSM for the deterministic reconstruction and prediction of non-linear wave fields. The basis of their work are wave registrations based on one or several wave probes at specific locations. Thus, sophisticated optimization procedures for the reconstruction of the wave field in space were used at the beginning as snapshots in the space domain are required as initial condition for the HOSM. This time-consuming reconstruction process hindered an effective application of the HOSM for wave prediction. However, taking advantage of the supposed drawback by using surface elevation snapshots continuously taken by a ship’s X-band radar at great distance as input, enables the use of the efficient and accurate HOSM without time-consuming reconstruction of the wave field in space domain. Nevertheless, they generally showed that long-time and large-space simulations of non-linear sea state evolutions can be performed accurately and efficiently with the HOSM. Clauss et al. [
35] and Klein et al. [
36] presented that the HOSM predicts non-linear wave group propagation very accurately. The applicability of the HOSM for non-linear real-time prediction was shown by Köllisch et al. [
4]. Desmar et al. [
37] applied the HOSM for the generation of reference wave snapshots in order to evaluate reconstruction methods of different complexity and the consequences on the prediction accuracy. This investigation showed that non-linear methods for wave reconstruction (based on spatio-temporal optical measurements) are improving the accuracy of the reconstructed initial wave field and prediction.
This paper presents a comparative study on the accuracy of intended wave prediction methods of different complexity. The objective is the evaluation of the applicability of the utilised methods for accurate deterministic wave prediction using irregular sea states. The focus lies on the investigation of the influence of the wave steepness, wave propagation distance and shape of the underlying spectrum. To be consistent with a possible real world application (input snapshots from ship’s X-band radar), the numerical and experimental investigations are performed in space domain. Herein, the unavoidable radar shadow around the ship’s position is also modelled and the influence is evaluated. For the experiment’s validation, a semi-experimental validation procedure is introduced as measuring the surface elevation in space domain is almost impractical in the controlled environment of a seakeeping basin. The accuracy of the predictions is evaluated with the surface similarity parameter allowing an exact, quantitative evaluation.
3. Experimental Program and Results
The following study comprises investigation of irregular sea states based on JONSWAP spectra evaluating the influence of wave steepness, the shape of the underlying spectrum (in terms of enhancement factor ) and the wave propagation over large distances. The above introduced intended wave prediction methods are used and the accuracy is evaluated quantitatively. A realistic real world application is simulated by taking eight consecutive snapshots per sea state (similar to a ship’s radar) into account. In addition, the unavoidable radar shadow is also modelled and its influence on the prediction accuracy is discussed. Following, all data are presented in full scale (model scale 1:75).
Table 1 presents the investigated sea states based on JONSWAP spectra with varying significant wave height
and enhancement factor
. Therefore, three different significant wave heights are investigated based on preselected wave steepness
marking small, moderate and steep irregular sea states. For each wave steepness, the enhancement factor
is varied. A special feature of this investigation is the implementation of an identical phase distribution (at the wave board) for all investigated sea states. This allows an exclusive evaluation of the influence of wave steepness and bandwidth of the underlying spectrum. Thus, differences in the evolution of the sea states (and thus to the accuracy of the intended prediction methods) are exclusively related to the underlying wave spectrum allowing conclusions on the effect of non-linear wave propagation due to wave steepness as well as band width of the spectrum.
The experiments are performed in the seakeeping basin of the Ocean Engineering Division at TUB. The basin is 110 m long and 8 m wide with a measuring range of 90 m. The water depth is 1 m. The waves are generated by an fully computer controlled, electrically driven wave generator, which can be used in piston as well as flap-type mode. The implemented wave generation software enables the generation of regular waves, transient wave packages, irregular sea states as well as tailored (critical) wave sequences. On the opposite side, a wave damping slope is installed to suppress disturbing wave reflections.
The accuracy of the different wave prediction methods applied on the measured irregular sea states is investigated with an semi-experimental approach. The aforementioned real world application—deterministic wave prediction based on ship’s X-band radar—serves as prototype. Thus, surface elevation snapshots in space domain are used as input. In addition, fixed prediction locations are defined at which the prediction in time domain is presented. The influence of the radar shadow on the prediction accuracy is additionally investigated. To avoid time-consuming and expensive series of measurements, which would be necessary to detect the surface elevation in space domain in the seakeeping basin, a semi-experimental approach is introduced for the preparation of the input snapshots. Measuring the surface elevation in space domain would denote that plenty of successive, pointwise measurements have to be conducted (with suitable calm down time in between) to obtain the snapshot.
The semi-experimental approach enables significantly fewer measurements by more validation scenarios at the same time. The fully non-linear numerical wave tank waveTUB is applied for the determination of the required surface elevation snapshots for the deterministic wave prediction. The seakeeping basin, used for the experimental validation, can be modelled exactly with this numerical wave tank (including the wave maker) resulting in identical boundary conditions at the wave board, i.e., providing an identical starting point of the wave evolution for both tanks. Thus, the irregular sea states are investigated in the seakeeping basin and reproduced with the numerical wave tank waveTUB providing the input wave snapshots for the deterministic wave prediction. The input snapshots based on waveTUB as well as the prediction results are experimentally validated.
Figure 1 presents the general scheme of this procedure showing the side view on the wave tank (all data full scale). On the left hand side the wave maker and on the right hand side a wave damping beach is installed/modelled. A surface elevation snapshot at a specific time is also indicated which is the basis for the intended wave prediction methods. For the pointwise validation of the waveTUB input snapshots as well as wave predictions by measurements in time domain at fixed positions, four wave gauges are installed during the experiments. The waveTUB reproductions are compared with the experiments near the wave maker at wave gauge 1 to draw conclusions on the quality of the reproduction. The predicted wave sequences for three different prediction distances are validated at the other three wave gauges (2-4).
The waveTUB simulations are used to extract eight consecutive snapshots from each sea state simulating consecutive snapshots taken from the ship’s radar of a real world application. Each consecutive snapshot is used as input for the wave prediction for the three location (cf.
Figure 1 wave gauges (2-4)).
Figure 2 presents exemplary the applied procedure in detail for sea state 1. The surface elevation snapshots (grey curves) taken from the waveTUB simulations are presented in the left diagrams—the consecutive time steps are displayed from top to bottom. In dependence on the real world application, the real world radar shadow close to an offshore structure is simulated by modifying the waveTUB results. Assuming that wave gauge 2 is the location of the radar and a realistic radar shadow of 500 m, the radar shadow is simulated by changing the surface elevation to zeros in this area (as well as behind wave gauge 2). The modified surface elevation snapshots are shown as red curves in the left diagrams of
Figure 2. In addition, the positions of the four wave gauges used in the experiments are indicated by the black vertical lines.
The measured surface elevations (blue curves) in time domain at wave gauge 2 are exemplary compared with the HOSM simulations (red curves) on the right hand side of
Figure 2—the prediction basis are the modified waveTUB input snapshots (red curves on the left hand side). Only the time span where an accurate prediction can be accomplished theoretically is presented. This prediction region marks the spatio-temporal domain which can be predicted based on known ranges in space and time for certain sea states. The group velocity of the fastest and slowest wave groups within the sea state define the prediction range—the slowest wave group must have reached the target location (position of offshore structure or in our study the positions of wave gauges 2-4) and the fastest wave group must not have passed the target location (cf. [
1,
2,
3,
48]). For this study, the prediction region is determined for each consecutive input snapshot separately but the variation for the different consecutive snapshot as well as sea states is marginal. Based on this, the average prediction time at wave gauge 2 is approximately
s (cf. red curves in
Figure 2 on the right hand side) with an average minimum forecast horizon time
s (time the slowest wave group within the sea state needs to reach the target location, i.e., starting point of the prediction range) and an average maximum forecast horizon
s neglecting any computational time (wave gauge 3:
s,
s and
s; wave gauge 4:
s,
s and
s). Please note that these values depend strongly on the dominant wave length and the underlying wave spectrum, i.e., with increasing wave length the forecast horizon will decrease.
The measured and calculated wave sequences at specific locations in time domain are evaluated quantitatively applying the surface similarity parameter (SSP) [
49]. The SSP represents “a quantitative method to compare temporal or spatial series in one dimension or temporal or spatial surfaces in two dimensions” [
49]. The SSP is a normalized error between two signals or surfaces written in terms of Sobolev norms
with
as Fourier transform of the two signals. The magnitude of the SSP varies between 0 (perfect agreement) and 1 (perfect disagreement). One important advantage compared to other available coefficients is the inclusion of both the amplitude and the phase difference of two series or surfaces [
49].
Figure 3 and
Figure 4 present the accuracy of the predicted wave sequences compared to the measurements for all investigated methods. For the sake of clarity, the results are divided into
Figure 3 comparing all NLS-related findings and
Figure 4 comparing the accuracy of linear transformation, second-order NLSE and HOSM.
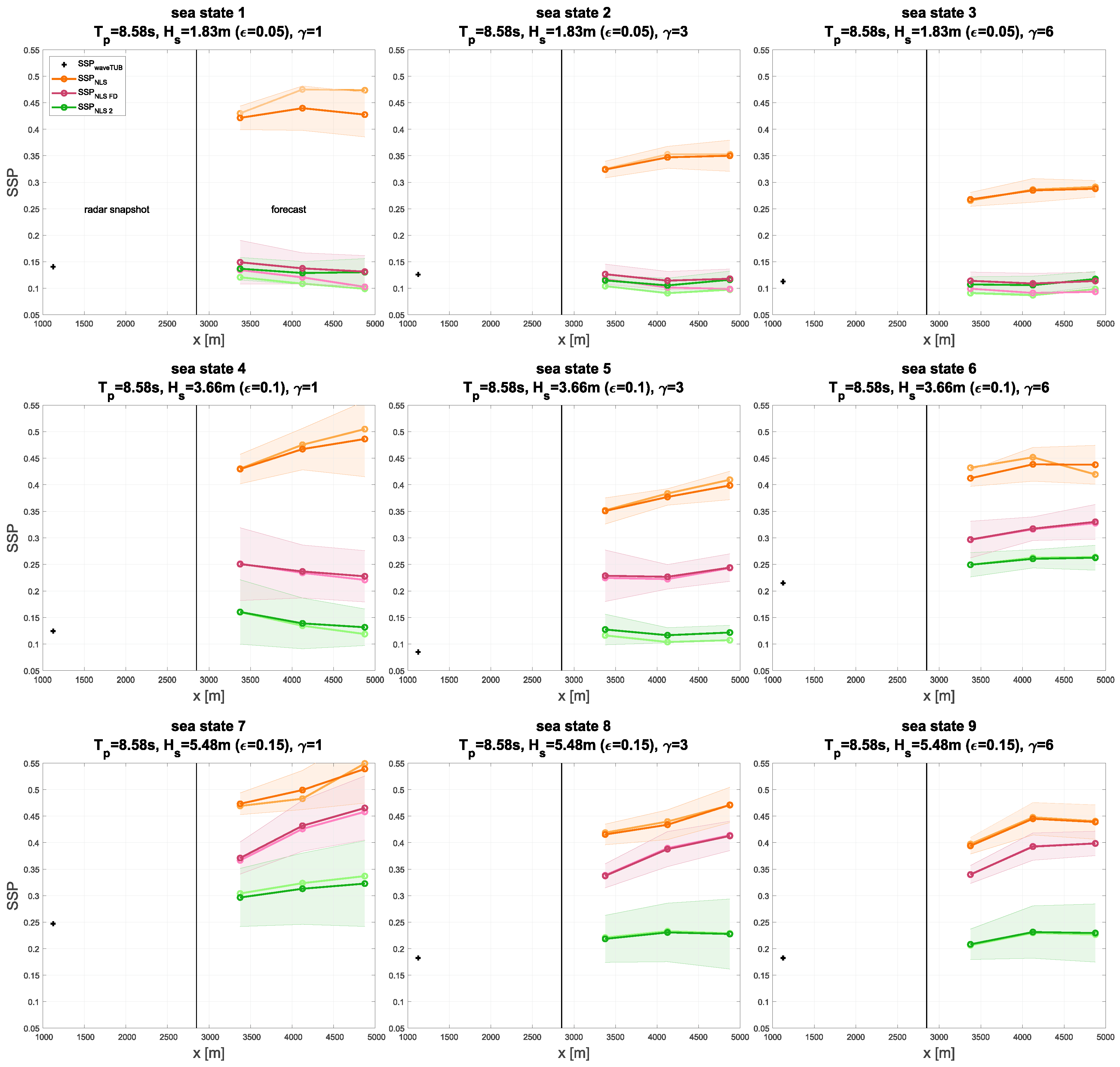
Figure 3 presents the SSP of the waveTUB input snapshot (black plus), the classical first-order NLSE (orange curves), the first-order NLSE including full dispersion operator (NLSE
FD, magenta curves) as well as the second-order NLSE (NLSE
2, green curves) simulations for the investigated sea states. The darker illustrated curves represent the prediction accuracy including the radar shadow and the lighter illustrated curves display the accuracy without radar shadow. The dots on the curves illustrate the positions of the three wave gauges. The SSP for the predicted sea states represents the mean value of the eight consecutive forecasts. The corresponding variance for the prediction with radar shadow is presented by the transparent areas around the respective curves (with the same colour). The SSP for the waveTUB input snapshot is calculated for the whole time trace at wave gauge 1. Each row presents sea states with constant wave steepness but increasing enhancement factor from left to right and each column sea states with constant enhancement factor but increasing wave steepness from top to bottom. The black vertical line marks the border between “radar” input snapshot (left) and the prediction zone (right).
Noteworthy at a first glance is the influence of the inclusion of the full dispersion operator within the first-order NLSE: the accuracy of the first-order NLSE is significantly improved by taking the full dispersion into account. Based on the underlying simplified assumptions of the NLSE, two main reasons can be identified. On the one hand, the assumed narrow bandwidth of the wave spectrum is not fulfilled for the investigated sea states. Thus, the assumption that the waves within the spectrum evolve with the same group velocity based on a dominant wave length is too inaccurate for deterministic wave prediction of arbitrary irregular sea states. This is clearly supported by the data shown in
Figure 3 top as the accuracy of the NLSE increases with increasing enhancement factor (narrower spectrum bandwidth). On the other hand, the range of validity of the NLSE are small amplitude waves. As a consequence, the gain in accuracy with increasing enhancement factor is less distinctive for the steepest irregular sea states. NLSE
FD and NLSE
2 have the same accuracy for the smallest steepness. This shows, that the NLSE can be applied for broader wave spectra by taking the full dispersion into account. With increasing wave steepness, the advantage of the NLSE
2 becomes clear. The accuracy of the NLSE
FD decreases with increasing steepness compared to the waveTUB input snapshot accuracy, whereas the accuracy of the NLSE
2 is indeed also effected but not so distinct showing a better overall performance also for the steepest cases.
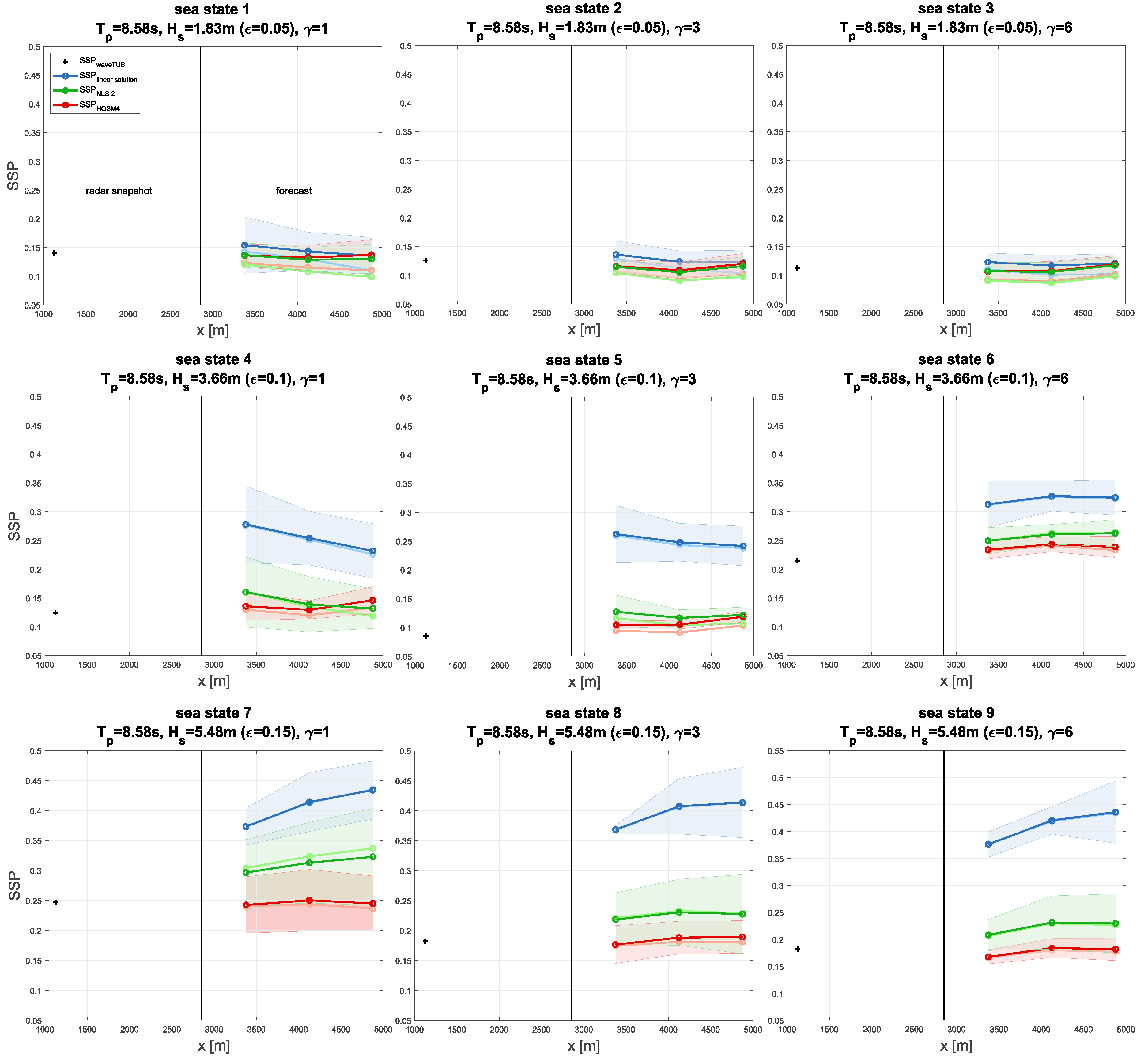
Figure 4 presents the SSP of the waveTUB input snapshot (black plus), the HOSM (red curves), NLSE
2 (green curves) as well as linear (blue curves) simulations for the investigated sea states. The diagram is arranged as the previous one, the darker illustrated curves represent the prediction accuracy including the radar shadow and the lighter illustrated curves display the accuracy without radar shadow. The dots on the curves illustrate the positions of the three wave gauges. The SSP for the predicted sea states represents the mean value of the eight consecutive forecasts. The corresponding variance for the prediction with radar shadow is presented by the transparent areas around the respective curves (with the same colour). The SSP for the waveTUB input snapshot is calculated for the whole time trace at wave gauge 1. Each row presents sea states with constant wave steepness but increasing enhancement factor from left to right and each column sea states with constant enhancement factor but increasing wave steepness from top to bottom. The black vertical line marks the border between “radar” input snapshot (left) and the prediction zone (right).
The first row (same small wave steepness and increasing enhancement factor) shows that for small wave steepness the HOSM, the NLSE2 and linear results are in the same accuracy range. This indicates that applying linear transformation for wave prediction of sea states with small wave steepness is sufficient and there is no need for more sophisticated methods. In addition, the three top diagrams reveal that the accuracy of the prediction remains almost constant over a very large distance, i.e., 2025 m or 18 dominant wave length from the beginning of the input snapshot and 4875 m or 43 dominant wave length from the end of the input snapshot to wave gauge 4. The main reason is the fact that for sea states with small wave steepness non-linear effects are very small and these non-linear effects evolve only in a large time and space scale. However, comparing the diagrams of each column shows clearly that with increasing wave steepness (vertical from top to bottom) the accuracy of the linear method decreases whereas the HOSM and NLSE2 are also accurate for steeper sea states. For the steepest investigated sea states, the HOSM prediction is still on the accuracy level of the waveTUB input snapshot over very large distances, whereas the NLSE2 shows to be less accurate. This indicates that the area of application of a forecast tool can be extended significantly by applying more complex wave models. In this context, the HOSM seems to be even applicable for very steep sea states.
Comparing the SSP of NLSE
FD (
Figure 3) and linear simulation (
Figure 4) shows no distinct trend. For the smallest steepness, both methods yield the same accuracy (independently from enhancement factor
). With increasing wave steepness, the accuracy of both methods is still similar with a marginal tendency for better prediction with the NLSE
FD.
The influence of the enhancement factor on the prediction accuracy of the HOSM, NLSE2 and linear simulations cannot be determined clearly. No trend is visible for the irregular sea sates with the smallest wave steepness. The discrepancy between linear transformation and HOSM simulation seems to increase slightly for increasing enhancement factor. Hereby, it remains unclear if this is caused by the different accuracies of the input snapshots or due the increase of the enhancement factor. The influence of the radar shadow on the accuracy of the prediction does not show a clear trend. For most of the cases, the influence of the radar shadow is negligible, otherwise the input snapshot without radar shadow provide a slightly improve as well as worsen of the accuracy.
Analysing the accuracy of the waveTUB input snapshot (black plus) reveals that the accuracy of the reproduction decreases with increasing wave steepness. In this context, the diagrams show that the HOSM prediction based on the waveTUB input snapshot remain almost on the same accuracy level (of the waveTUB input snapshot) for all wave steepness. This illustrates clearly that the accuracy of a real world wave prediction tool depends strongly on the accuracy of the detected input wave sequence. Strictly speaking, the wave prediction methods necessary for an accurate prediction are already available and not only the results of this investigation (cf. [
10,
13,
14,
15,
26,
30]) reveals that depending on the specific task very complex and numerically less efficient methods are not necessarily required for a successful application. However, the detection of the surrounding wave field by applying sophisticated wave inversion algorithm on X-band radar clutter is still challenging, but also the crucial factor for a successful application of a wave forecast tool. Hereby, the principle of measurements of X-band radars yield a main drawback as the radar cannot detect wave troughs behind (steep) wave crests. The main challenge hereby is, that most of the relevant applications regarding wave prediction and decision support are related to small wave steepness, where the intensity of the radar clutter is significant smaller compared to more steeper sea states. Less intensity correlates with reduced accuracy, particularly in the far field of the radar reducing the wave prediction horizon. Consequently, the fast linear method accurate enough for small wave steepness is significantly affected by the radar measuring accuracy. In addition, the vessel motions have to be measured accurately (for cruising vessels) in order to determine the position of the X-band radar as a critical prerequisite for the wave inversion. Generally, also the measuring accuracy (radar clutter as well as vessel motion) plays a major role for accurate wave prediction which can be divided in systematic and random error. The mentioned parameters relevant for an accurate wave prediction are only summarized without any detailed discussion as this is out of the scope of this paper.



 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}