A Near-Shore Linear Wave Model with the Mixed Finite Volume and Finite Difference Unstructured Mesh Method



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Governing Equations
2.1. Current Flow
2.2. Wave Model
2.3. Wave Breaking
2.4. Wave Diffraction
2.5. Dissipation due to Bottom Friction
2.6. Initial and Boundary Conditions
3. Numerical Method
3.1. The Operator-Splitting Technique
3.2. Solution in the Frequency Space
3.3. Solution in the Directional Space
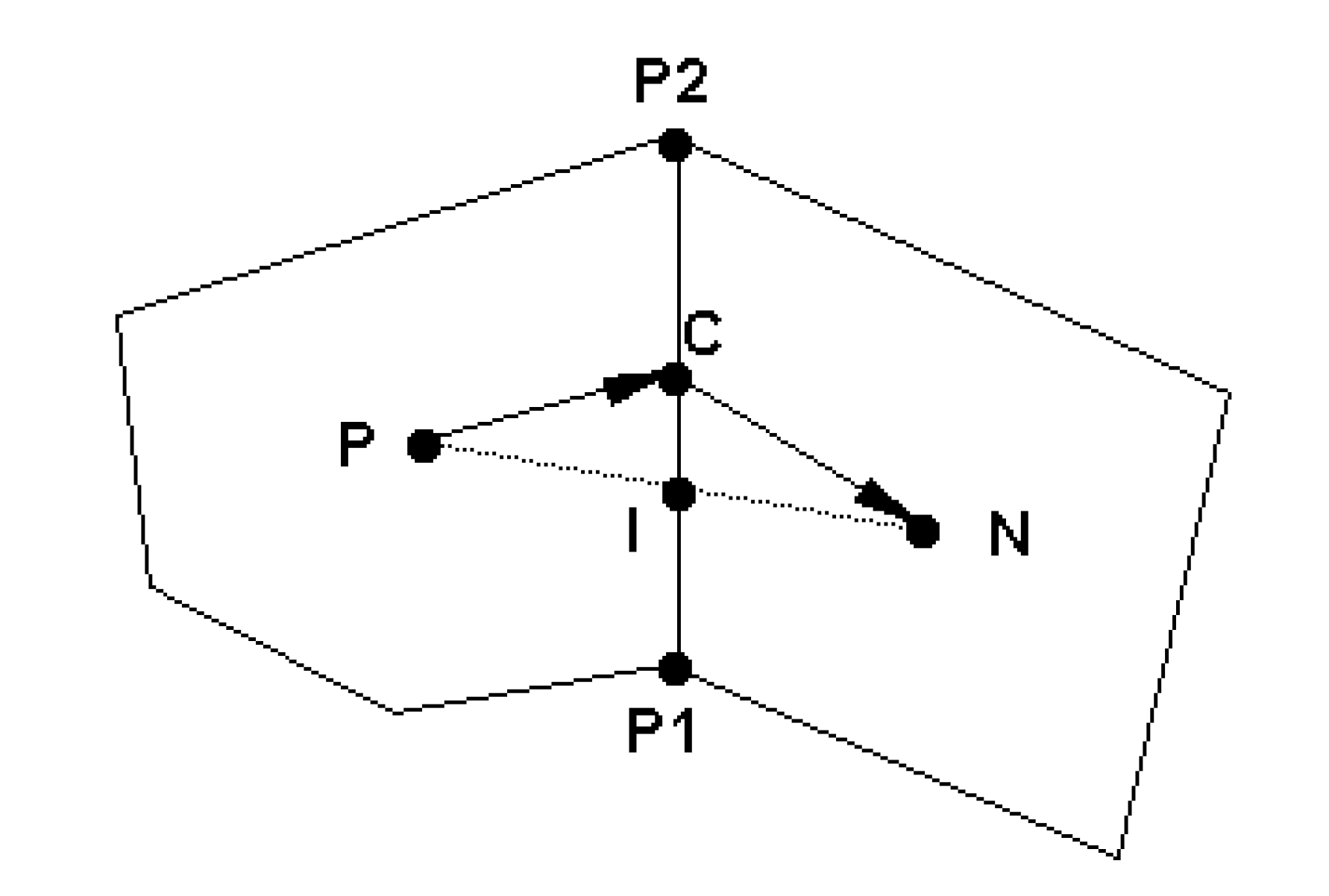
3.4. Solution in the Geographical Space
3.5. Coupling Procedure
4. Wave Shoaling and Refraction
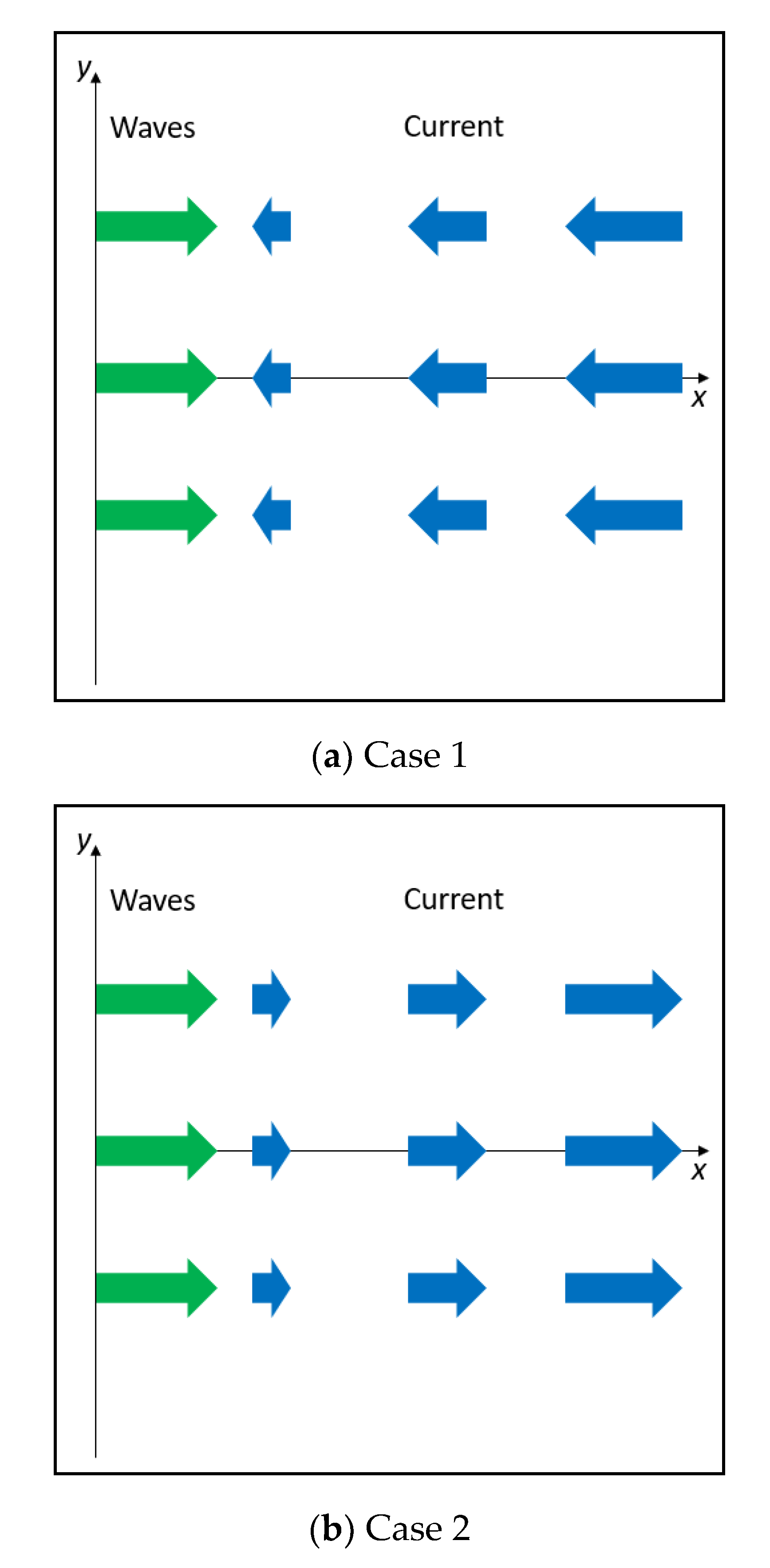
4.1. Current-Induced Shoaling
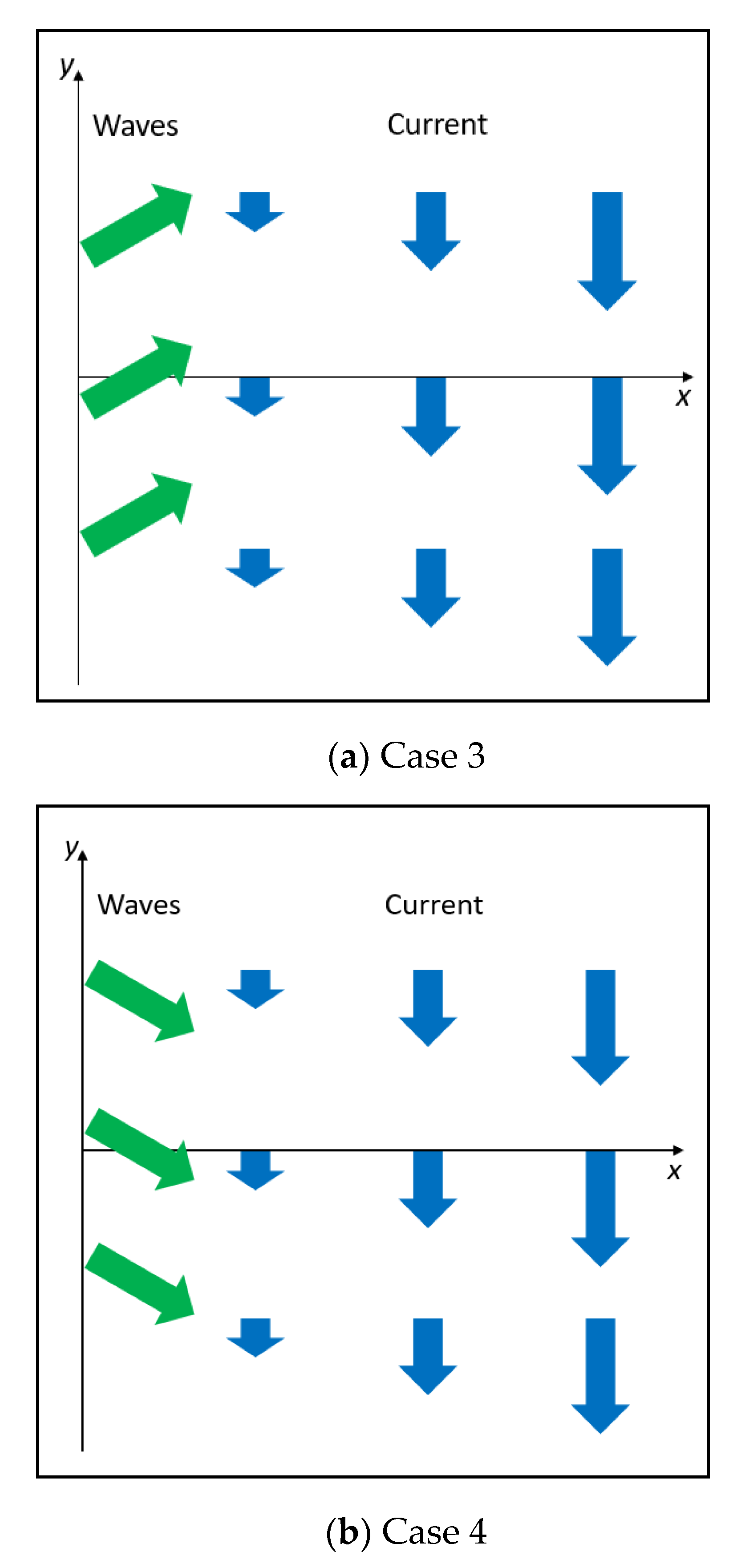
4.2. Current-Induced Refraction
4.3. Depth-Induced Shoaling and Refraction
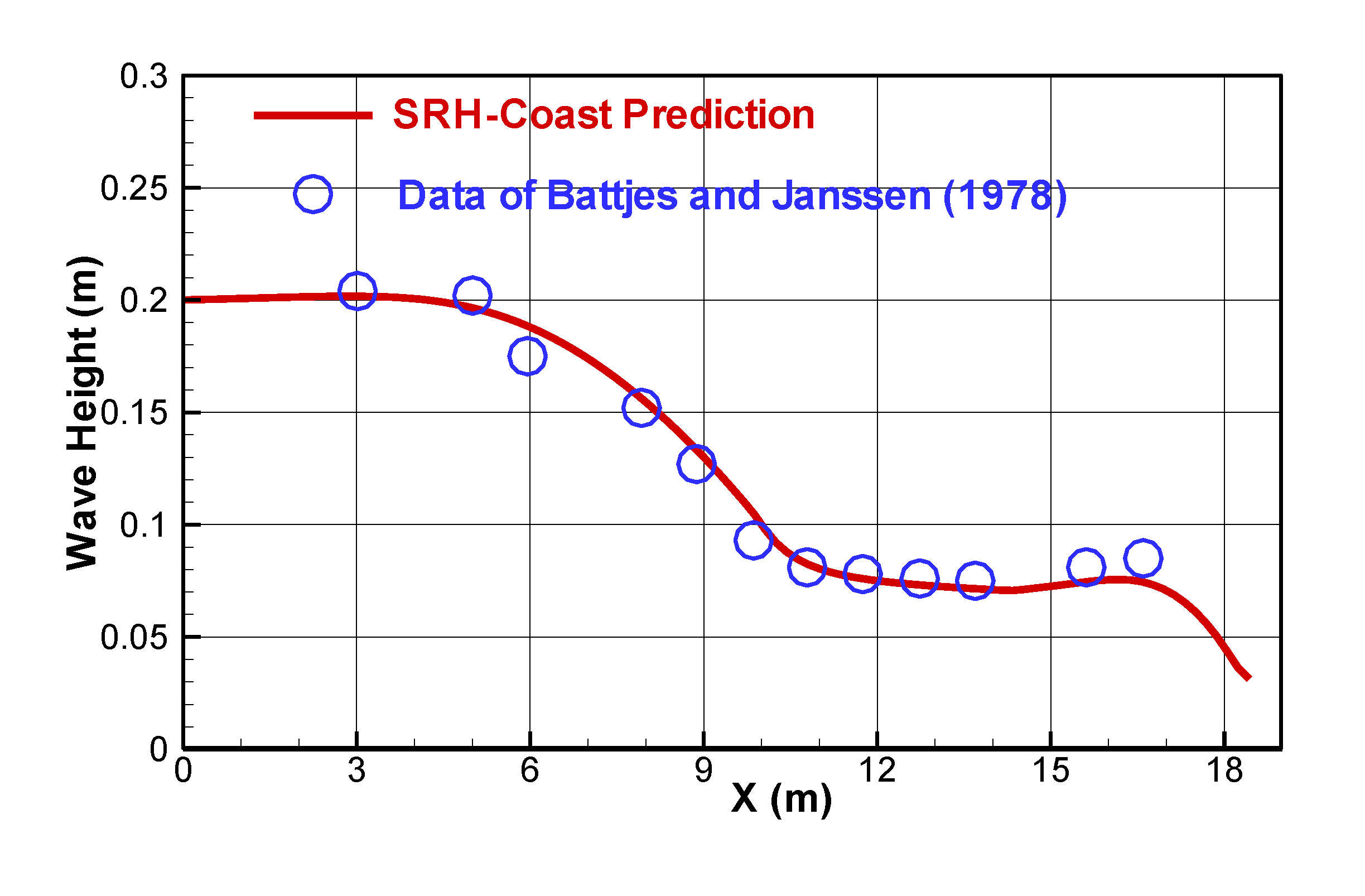
5. Wave Breaking
- if 0 ≤ x ≤ 10, h = 0.616 − 1/20*(x)
- if 10 < x ≤ 14.4, h = 0.116 + 1/40 *(x − 10)
- if 14.4 < x, h = 0.226 − 1/20*(x − 14.4)
6. Wave Diffraction
7. Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
References
- Dean, R.G.; Dalrymple, R.A. Coastal Processes with Engineering Applications; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Davidson-Arnott, R. Introduction to Coastal Processes and Geomorphology; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Garcia, A.; Rangel-Buitrago, N.; Oakley, J.A.; Williams, A.T. Use of ecosystems in coastal erosion management. Ocean Coast. Manag. 2018, 156, 277–289. [Google Scholar] [CrossRef]
- Álvarez, M.; Carballo, R.; Ramos, V.; Iglesias, G. An integrated approach for the planning of dredging operations in estuaries. Ocean Eng. 2017, 140, 73–83. [Google Scholar] [CrossRef]
- Sengupta, D.; Chen, R.; Meadows, M.E. Building beyond land: An overview of coastal land reclamation in 16 global megacities. Appl. Geogr. 2018, 90, 229–238. [Google Scholar] [CrossRef]
- Lagmay, A.M.F.; Agaton, R.P.; Bahala, M.A.C.; Briones, J.B.L.T.; Cabacaba, K.M.C.; Caro, C.V.C.; Dasallas, L.L.; Gonzalo, L.A.L.; Ladiero, C.N.; Lapidez, J.P.; et al. Devastating storm surges of Typhoon Haiyan. Int. J. Disaster Risk Reduct. 2015, 11, 1–12. [Google Scholar] [CrossRef]
- Brown, J.M.; Phelps, J.J.C.; Barkwith, A.; Hurst, M.D.; Ellis, M.A.; Plater, A.J. The effectiveness of beach mega-nourishment, assessed over three management epochs. J. Environ. Manag. 2016, 184, 400–408. [Google Scholar] [CrossRef] [Green Version]
- Carrasco, A.R.; Ferreira, Ó.; Roelvink, D. Coastal lagoons and rising sea level: A review. Earth Sci. Rev. 2016, 154, 356–368. [Google Scholar] [CrossRef] [Green Version]
- Goldbach, C.; Schlüter, A.; Fujitani, M. Analyzing potential effects of migration on coastal resource conservation in Southeastern Ghana. J. Environ. Manag. 2018, 209, 475–483. [Google Scholar] [CrossRef] [PubMed]
- Sorensen, R.M. Basic Coastal Engineering; Springer: New York, NY, USA, 2006. [Google Scholar]
- Deng, J.; Woodroffe, C.D.; Roger, K.; Harff, J. Morphogenetic modelling of coastal and estuarine evolution. Earth Sci. Rev. 2017, 171, 254–271. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Lai, Y.G. Estuary and Coastal Modeling: Literature Review and Model Design; Technical Report No. ENV-2019-034; Technical Service Center, Bureau of Reclamation: Denver, CO, USA, 2019. [Google Scholar]
- Fleming, C.A.; Hunt, J.N. Application of a sediment transport model. In Proceedings of the 15th International Conference on Coastal Engineering, Honolulu, HI, USA, 11–17 July 1976; pp. 1194–1202. [Google Scholar]
- Longuet-Higgins, M.S. Longshore currents generated by obliquely incident sea waves. J. Geophys. 1970, 75, 6779–6789. [Google Scholar]
- Coeffe, Y.; Pechon, P.H. Modelling of sea-bed evolution under waves action. In Proceedings of the 18th International Conference on Coastal Engineering, Cape Town, South Africa, 14–19 November 1982; pp. 1149–1160. [Google Scholar]
- Boer, S.; de Vriend, H.J.; Wind, H.G. A system of mathematical models for the simulation of morphological processes in the coastal area. In Proceedings of the 19th International Conference on Coastal Engineering, Houston, TX, USA, 3–7 September 1984; pp. 1437–1453. [Google Scholar]
- De Vriend, H.J.; Ribberink, J.S. A quasi-3D mathematical model of coastal morphology. In Proceedings of the 21st International Conference on Coastal Engineering, Costa del Sol-Malaga, Spain, 20–25 June 1988; pp. 1689–1703. [Google Scholar]
- Price, D.M.; Chesher, T.J.; Southgate, H.N. PISCES: A Morphodynamic Coastal Area Model; Report, SR 411; HR Wallingford: Wallingford, UK, 1995. [Google Scholar]
- Lou, J.; Ridd, P.V. Modelling of suspended sediment transport in coastal areas under waves and currents. Estuarine. Coast. Shelf Sci. 1997, 45, 1–16. [Google Scholar]
- Deltares. Delft3D-WAVE. In User Manual; Version 3.15.34160; Deltares: Delft, The Netherlands, 2014. [Google Scholar]
- Hervouet, J.M.; Bates, P. The TELEMAC modelling system—Special issue. Hydrol. Process. 2000, 14, 2207–2208. [Google Scholar] [CrossRef]
- Ding, Y.; Wang, S.S.Y. Development and application of a coastal and estuarine morphological process modeling system. J. Coast. Res. 2008, 52, 127–140. [Google Scholar] [CrossRef]
- Klingbeil, K.; Lemarié, F.; Debreu, L.; Burchard, H. The numerics of hydrostatic structured-grid coastal ocean models: State of the art and future perspectives. Ocean Model. 2018, in press. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Li, S.; Zuo, L.; Liu, H.; Roelvink, J.A. Advances in sediment transport under combined action of waves and currents. Int. J. Sediment Res. 2015, 30, 351–360. [Google Scholar] [CrossRef]
- Amoudry, L.O.; Souza, A.J. Deterministic coastal morphological and sediment transport modeling: A review and discussion. Rev. Geophys. 2011, 49, RG2002. [Google Scholar] [CrossRef] [Green Version]
- Booij, N.; Ris, R.C.; Holthuijsen, L.H. A third-generation wave model for coastal regions: 1. Model description and validation. J. Geophys. Res. 1999, 104, 7649–7666. [Google Scholar] [CrossRef] [Green Version]
- SWAN Team. SWAN–Scientific and Technical Documentation; Delft University of Technology: Delft, The Netherlands, 2018; Available online: http://www.swan.tudelft.nl (accessed on 5 February 2020).
- Luo, J.; Li, M.; Sun, Z.; O’Connor, B.A. Numerical modelling of hydrodynamics and sand transport in the tide-dominated coastal-to-estuarine region. Mar. Geol. 2013, 342, 14–27. [Google Scholar] [CrossRef] [Green Version]
- Jia, Y.; Wang, S.S.Y. CCHE2d: Two-Dimensional Hydrodynamics and Sediment Transport Model for Unsteady Open Channel Flows over Loose Bed; Technical Report, No. NCCHE-TR-2001-1; National Center for Computational Hydroscience and Engineering: University, MS, USA, 2001. [Google Scholar]
- Larson, M.; Kraus, N.C. Numerical model of longshore current for bar and trough beaches. J. Waterw. Port Coast Ocean Eng. 1991, 117, 326–347. [Google Scholar] [CrossRef]
- Janssen, P.A.E.M. Progress in ocean wave forecasting. J. Comput. Phys. 2008, 227, 3572–3594. [Google Scholar] [CrossRef]
- Hasselmann, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, H.; Hasselmann, D.E.; Kruseman, P.; et al. Measurements of wind-wave growth and swell decay during the Joint North Sea Wave Project (JONSWAP). Dtsch. Hydrogr. Z. 1973, 12, A8. [Google Scholar]
- WAMDI Group. The WAM Model—A third generation ocean wave prediction model. J. Phys. Oceanog. 1988, 18, 1775–1810. [Google Scholar] [CrossRef] [Green Version]
- SWAMP Group; Sea Wave Modeling Project. Ocean Wave Modeling; Plenum Pub Corp.: New York, NY, USA, 1985. [Google Scholar]
- Hasselmann, S.; Hasselmann, K.; Allender, J.H.; Barnett, T.P. Computations and parameterizations of the nonlinear energy transfer in a gravity wave spectrum. Part II: Parameterizations of the nonlinear transfer for application in wave models. J. Phys. Oceanogr. 1985, 15, 1378–1391. [Google Scholar] [CrossRef] [Green Version]
- Komen, G.J.; Hasselmann, S.; Hasselmann, K. On the existence of a fully developed wind-sea spectrum. J. Phys. Oceanogr. 1984, 14, 1271–1285. [Google Scholar] [CrossRef]
- Tolman, H.L. A third-generation model for wind waves on slowly varying, unsteady, and inhomogeneous depths and currents. J. Phys. Oceanogr. 1991, 21, 782–797. [Google Scholar] [CrossRef]
- Benoit, M.; Marcos, F.; Becq, F. Development of a Third Generation Shallow Water Wave Model with Unstructured Spatial Meshing, Proc. 25th Int. Conf. Coastal Engineering (Orlando); ASCE: New York, NY, USA, 1996; pp. 465–478. [Google Scholar]
- Sorensen, O.R.; Kofoed-Hansen, H.; Rugbjerg, M.; Sorensen, L.S. A third-generation spectral wave model using an unstructured finite volume technique. In Coastal Engineering Conference; American Society of Civil Engineers: Reston, VA, USA, 2004; Volume 29, p. 894. [Google Scholar]
- Roland, A.; Zanke, U.; Hsu, T.W.; Ou, S.H.; Liau, J.M.; Wang, S.K. Verification of a 3rd generation FEM spectral wave model for shallow and deep water applications. ASME Conf. Proc. 2006, 2006, 487–499. [Google Scholar]
- Hsu, T.W.; Ou, S.H.; Liau, J.M. Hindcasting nearshore wind waves using a FEM code for SWAN. Coast. Eng. 2005, 52, 177–195. [Google Scholar] [CrossRef]
- Qi, J.; Chen, C.; Beardsley, R.C.; Perrie, W.; Cowles, G.W.; Lai, Z. An unstructured-grid finite-volume surface wave model (FVCOM-SWAVE): Implementation, validations and applications. Ocean Model. 2009, 28, 153–166. [Google Scholar] [CrossRef]
- Zijlema, M. Computation of wind-wave spectra in coastal waters with SWAN on unstructured grids. Coast. Eng. 2010, 57, 267–277. [Google Scholar] [CrossRef]
- Rusu, E. Reliability and Applications of the Numerical Wave Predictions in the Black Sea. Front. Mar. Sci. 2016, 3, 95. [Google Scholar] [CrossRef] [Green Version]
- Anton, I.A.; Rusu, L.; Anton, C. Nearshore Wave Dynamics at Mangalia Beach Simulated by Spectral Models. J. Mar. Sci. Eng. 2019, 7, 206. [Google Scholar] [CrossRef] [Green Version]
- Yildirim, B.G.; Karniadakis, G.E. A hybrid spectral/DG method for solving the phase-averaged ocean wave equation: Algorithm and validation. J. Comput. Phys. 2012, 231, 4921–4953. [Google Scholar] [CrossRef]
- Meixner, J.D. Discontinuous Galerkin Methods for Spectral Wave-Circulation Modeling. Ph.D. Thesis, The University of Texas at Austin, Austin, TX, USA, 2013. [Google Scholar]
- Kim, K.O.; Yun, J.-H.; Choi, B.H. Simulation of Typhoon Bolaven using integrally coupled tide-surge-wave models based on locally enhanced fine-mesh unstructured grid system. J. Coast. Res. 2016, 75, 1127–1131. [Google Scholar] [CrossRef]
- Farhadzadeh, A.; Gangai, J. Numerical modeling of coastal storms for ice-free and ice-covered Lake Erie. J. Coast. Res. 2017, 33, 1383–1396. [Google Scholar] [CrossRef]
- Qu, K.; Tang, H.S.; Agrawal, A. Integration of fully 3D fluid dynamics and geophysical fluid dynamics models for multiphysics coastal ocean flows: Simulation of local complex free-surface phenomena. Ocean Model. 2019, 135, 14–30. [Google Scholar] [CrossRef]
- Cavaleri, L.; Barbariol, F.; Benetazzo, A.; Waseda, T. Ocean Wave Physics and Modeling: The Message from the 2019 WISE Meeting. Bull. Am. Meteorol. Soc. 2019, 100, ES297–ES300. [Google Scholar] [CrossRef]
- Lai, Y.G. SRH-2D Version 2: Theory and User’s Manual; Technical Service Center, Bureau of Reclamation: Denver, CO, USA, 2008. [Google Scholar]
- Lai, Y.G. Two-Dimensional Depth-Averaged Flow Modeling with an Unstructured Hybrid Mesh. J. Hydraul. Eng. 2010, 136, 12–23. [Google Scholar] [CrossRef] [Green Version]
- Holthuijsen, L.H. Waves in Oceanic and Coastal Waters; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Lai, Y.G.; Kim, H. Estuary and Coastal Modeling: Wave Module Development and Verification; Technical Report No. ENV-2020-029; Technical Service Center, Bureau of Reclamation: Denver, CO, USA, 2020. [Google Scholar]
- Lin, L.; Demirbilek, Z.; Mase, H.; Zheng, J.; Yamada, F. CMS-Wave: A nearshore spectral wave processes model for coastal inlets and navigation projects. In Technical Report ERDC/CHL TR-08-13; U.S. Army Engineer Research and Development Center, Coastal and Hydraulics Laboratory: Vicksburg, MS, USA, 2008. [Google Scholar]
- Battjes, J.A.; Janssen, J.P.F.M. Energy loss and set-up due to breaking of random waves. In Proceedings of the 16th International Conference on Coastal Engineering, Hamburg, Germany, 27 August–3 September 1978; pp. 569–587. [Google Scholar]
- Holthuijsen, L.H.; Hermanb, A.; Booija, N. Phase-decoupled refraction–diffraction for spectral wave models. Coast. Eng. 2003, 49, 291–305. [Google Scholar] [CrossRef]
- Hsu, T.W.; Ou, S.H.; Liau, J.M. WWM extended to account for wave diffraction on a current over a rapidly varying topography. In Proceedings of the Third Chinese-German Joint Symposium on Coastal and Ocean Engineering (JOINT2006), Tainan, Taiwan, 25 August 2006. [Google Scholar]
- Mase, H. Multidirectional random wave transformation model based on energy balance equation. Coast. Eng. J. 2001, 43, 317–337. [Google Scholar] [CrossRef]
- Sanchez, A.; Wu, W.; Beck, T.M. A depth-averaged 2-D model of flow and sediment transport in coastal water. Ocean Dyn. 2016, 66, 1475–1495. [Google Scholar] [CrossRef]
- Enet, F.; Nahon, A.; van Vledder, G.; Hurdle, D. Evaluation of diffraction behind a semi-infinite breakwater in the SWAN Wave Model. In Proceedings of the Ninth International Symposium on Ocean Wave Measurement and Analysis—WAVES06, Emmeloord, Alkyon, 8–16 November 2006. [Google Scholar]
- Bertotti, L.; Cavaleri, L. Accuracy of wind and wave evaluation in coastal regions. In Proceedings of the 24th International Conference on Coastal Engineering, Kobe, Japan, 23–28 October 1994. [Google Scholar]
- Mitsuyasu, H.; Tsai, F.; Subara, T.; Mizuno, S.; Ohkusu, M.; Honda, T.; Rikiishi, K. Observation of the Directional Spectrum of Ocean Waves Using a Cloverleaf Buoy. J. Phys. Oceanogr. 1975, 5, 750–760. [Google Scholar] [CrossRef] [Green Version]
- Boris, J.P.; Book, D.L. Flux corrected transport I, SHASTA, a fluid transport algorithm that works. J. Comput. Phys. 1973, 11, 38–69. [Google Scholar] [CrossRef]
- Lai, Y.G. Unstructured grid arbitrarily shaped element method for fluid flow simulation. AIAA J. 2000, 38, 2246–2252. [Google Scholar] [CrossRef]
- Adam, A. Finite Element, Adaptive Spectral Wave Modelling. Ph.D. Thesis, Imperial College London, London, UK, 2016. [Google Scholar]
- Philips, O.M. The Dynamics of the Upper Ocean. In Cambridge Monographs on Mechanics; Cambridge University Press: Cambridge, UK, 1977. [Google Scholar]
- Mei, C.C.; Stiassnie, M.; Yue, D.K.P. Theory and Applications of Ocean Surface Waves: Nonlinear aspects. Advanced series on ocean engineering. World Sci. 2005, 23, 1071. [Google Scholar]
- Longuet-Higgins, M.S.; Stewart, R.W. The changes in amplitude of short gravity waves on steady non-uniform currents. J. Fluid Mech. 1961, 10, 529–549. [Google Scholar] [CrossRef]
- Shemdin, O.H.; Hsiao, S.V.; Carlson, H.E.; Hasselmann, K.; Schulze, K. Mechanisms of wave transformation in finite depth water. J. Geophys. Res. 1980, 85, 5012–5018. [Google Scholar] [CrossRef] [Green Version]
- Sommerfeld, A. Mathematische theorie der diffraktion. Mathematische Annalen. 1896, 47, 317–374. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, Y.G.; Kim, H.S. A Near-Shore Linear Wave Model with the Mixed Finite Volume and Finite Difference Unstructured Mesh Method. Fluids 2020, 5, 199. https://doi.org/10.3390/fluids5040199
Lai YG, Kim HS. A Near-Shore Linear Wave Model with the Mixed Finite Volume and Finite Difference Unstructured Mesh Method. Fluids. 2020; 5(4):199. https://doi.org/10.3390/fluids5040199
Chicago/Turabian StyleLai, Yong G., and Han Sang Kim. 2020. "A Near-Shore Linear Wave Model with the Mixed Finite Volume and Finite Difference Unstructured Mesh Method" Fluids 5, no. 4: 199. https://doi.org/10.3390/fluids5040199
APA StyleLai, Y. G., & Kim, H. S. (2020). A Near-Shore Linear Wave Model with the Mixed Finite Volume and Finite Difference Unstructured Mesh Method. Fluids, 5(4), 199. https://doi.org/10.3390/fluids5040199