
Hybrid Neural Network Reduced Order Modelling for Turbulent Flows with Geometric Parameters

 ,
,  ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Models and Methods
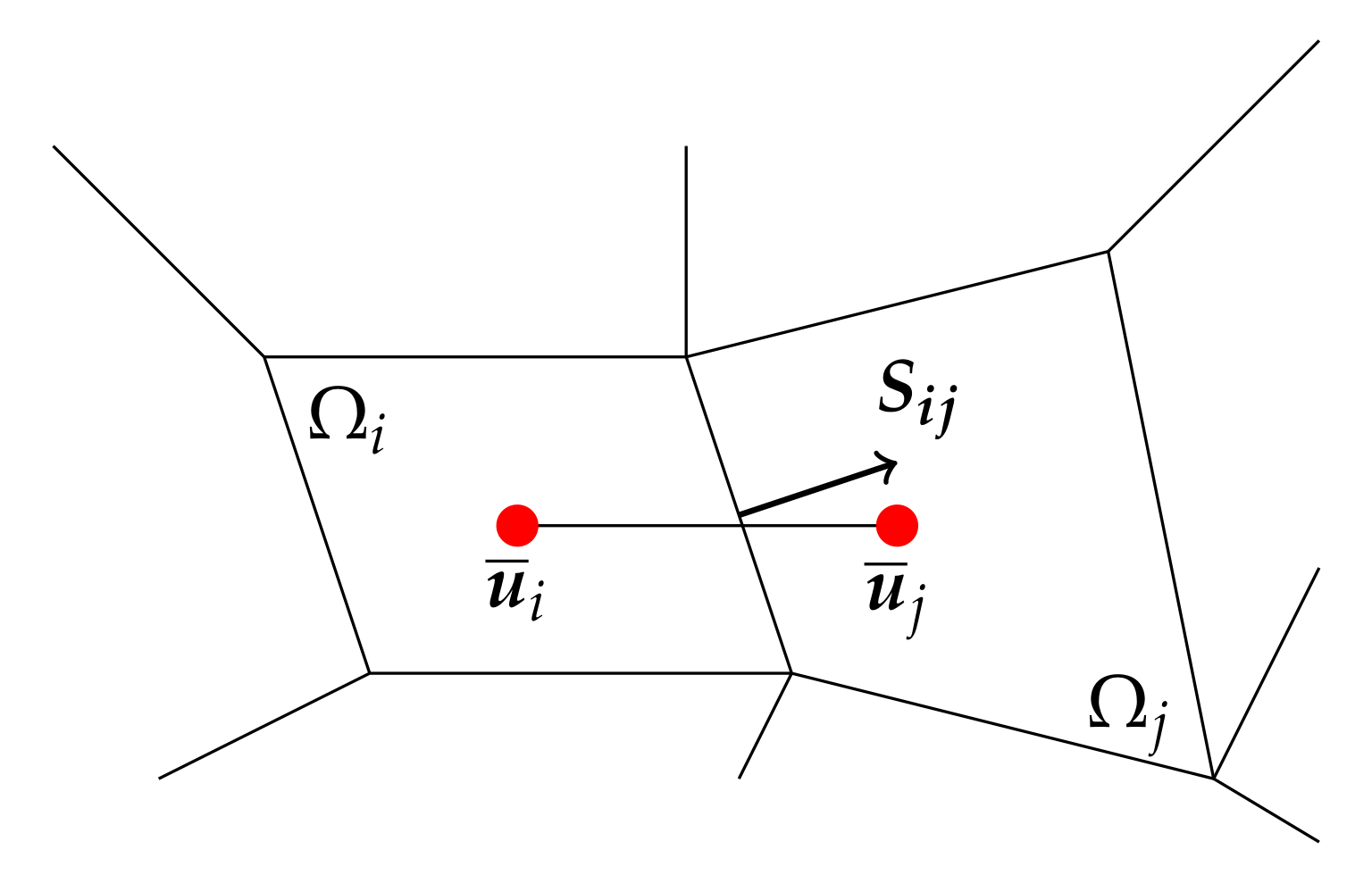
2.1. The Full Order Problem
2.2. Mesh Motion
- As shown in Section 2.1, also element-wisely, all the equations are written in their physical domain;
- A finite volume mesh does not have a standard cell shape, resulting in an almost random-shaped polyhedra collection;
- Mapping the equations to a reference domain may require the use of a nonlinear map, but this choice would lead to a change in the nature of the equations of the problem (see [23]).
- 1.
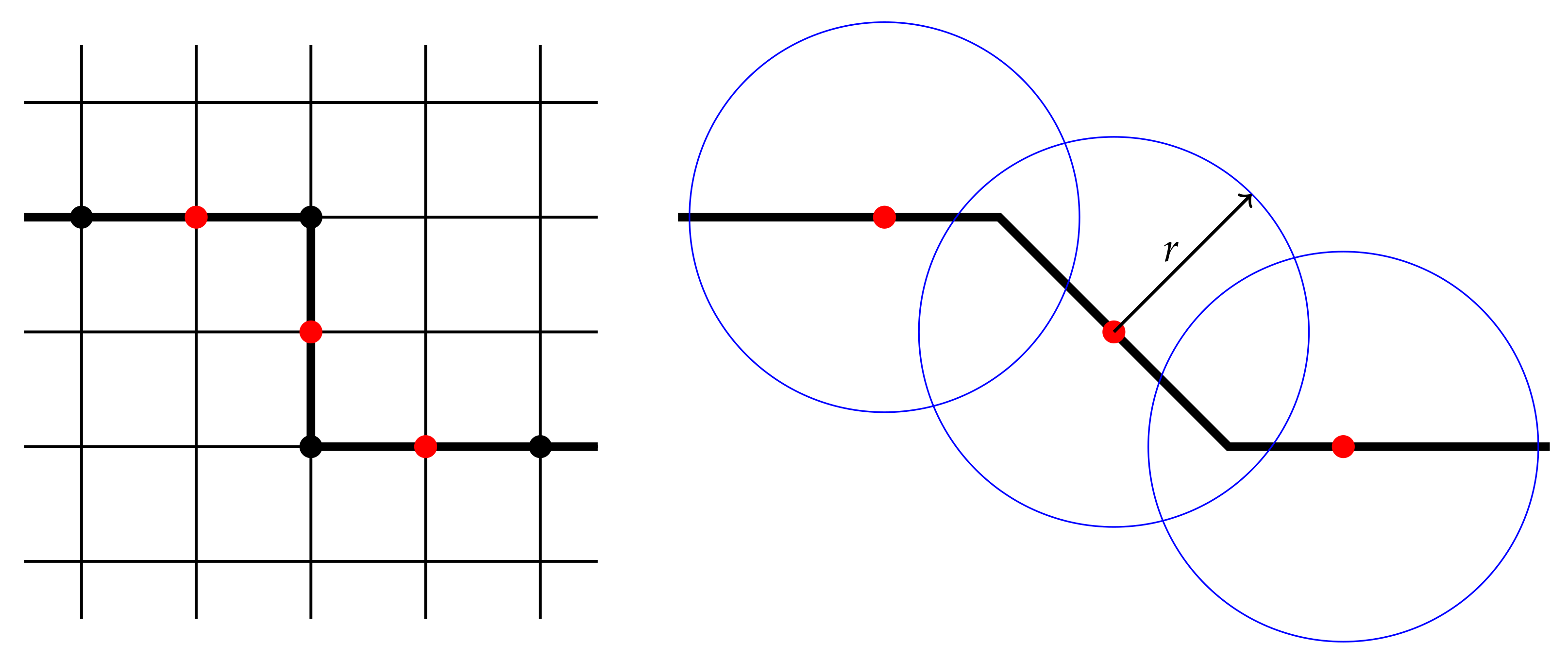
- Select the control points in the boundaries to be moved and shift their position obeying the fixed motion rule selected for the geometry modification according to the parameter dependent displacement law: they can be either all the points in the boundary or just a fraction of their total amount if the dimension of the mesh is big enough (see Figure 2), since the higher the number of control points, the bigger (and more expensive) the resulting RBF linear problem to be solved;
- 2.
- Calculate all the parameters for the RBF to ensure the interpolation capability of the schemeresulting in the solution of the following linear problem:where contains the evaluations ; , with spacial dimension d, is filled as for each row; contains the coefficients for the polynomial ; and are the displacements for the control points, known a priori (see [25]);
- 3.
- Evaluate all the remaining points of the grid by applying Equation (4).
- Equation (4) is used to move not only the internal points of the grid but also the points located on the moving boundaries that are not selected as control points: even if their displacement could be calculated exactly, changing their position by rigid translation while all the points of the internal mesh are shifted by the use of the RBF may lead to a corrupted grid;
- Equation (5) requires the resolution of a dense linear problem whose dimension is equal to . Thus, the number of control points has to be carefully selected. Fortunately, the resolution of Equation (5) only has to be carried out once, storing all the necessary parameters to be used in the following mesh motions;
- By the use of this mesh motion strategy, one ends up with meshes having all the same topology, which is an important feature when different geometries have to be compared.
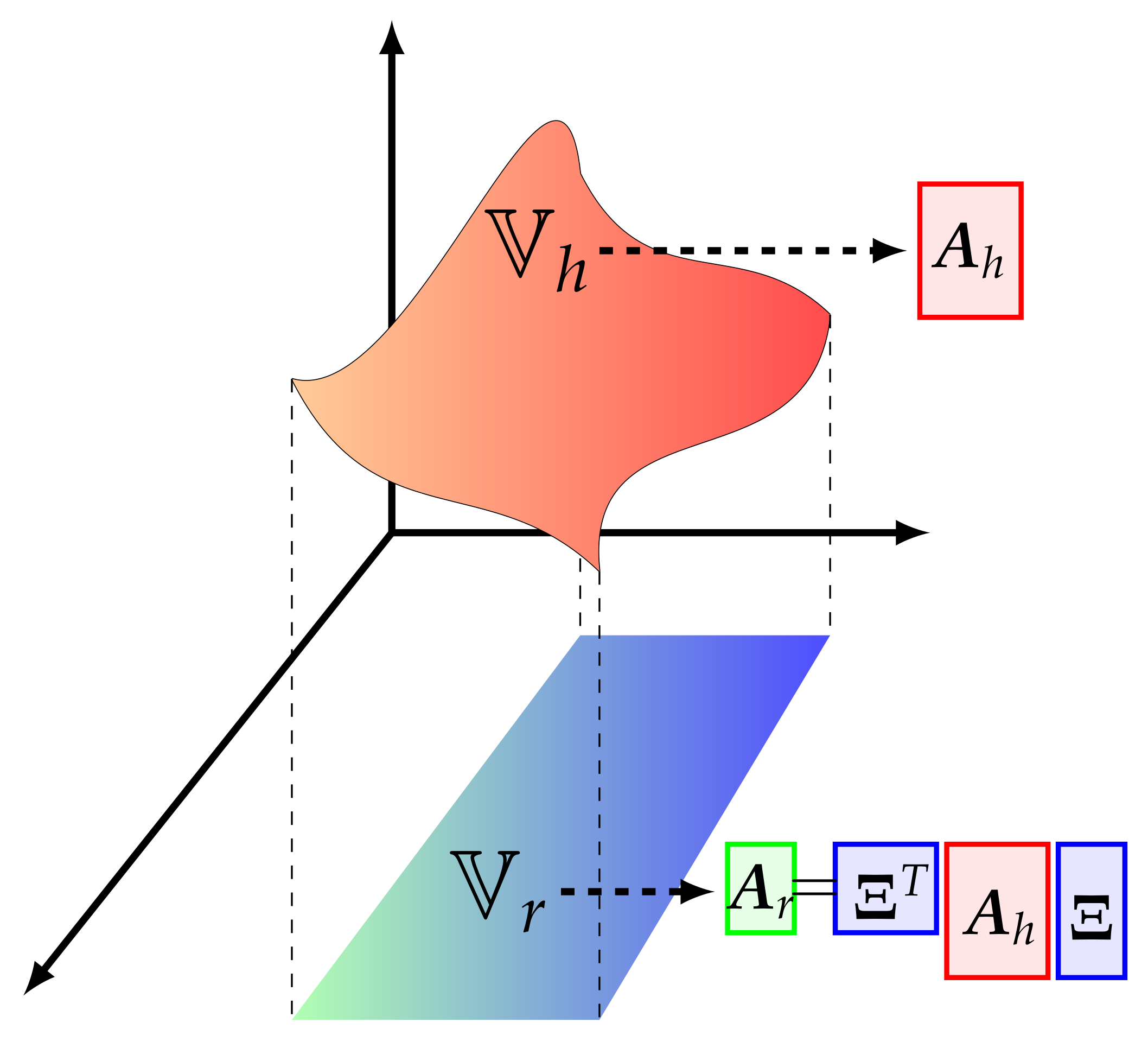
2.3. The Reduced Order Problem
2.4. The Reduced Order SIMPLE Algorithm
| Algorithm 1: The Reduced Order SIMPLE algorithm |
Input: first attempt reduced pressure and velocity coefficients and ; modal basis functions matrices for pressure and velocity and Output: reduced pressure and velocity fields and
|
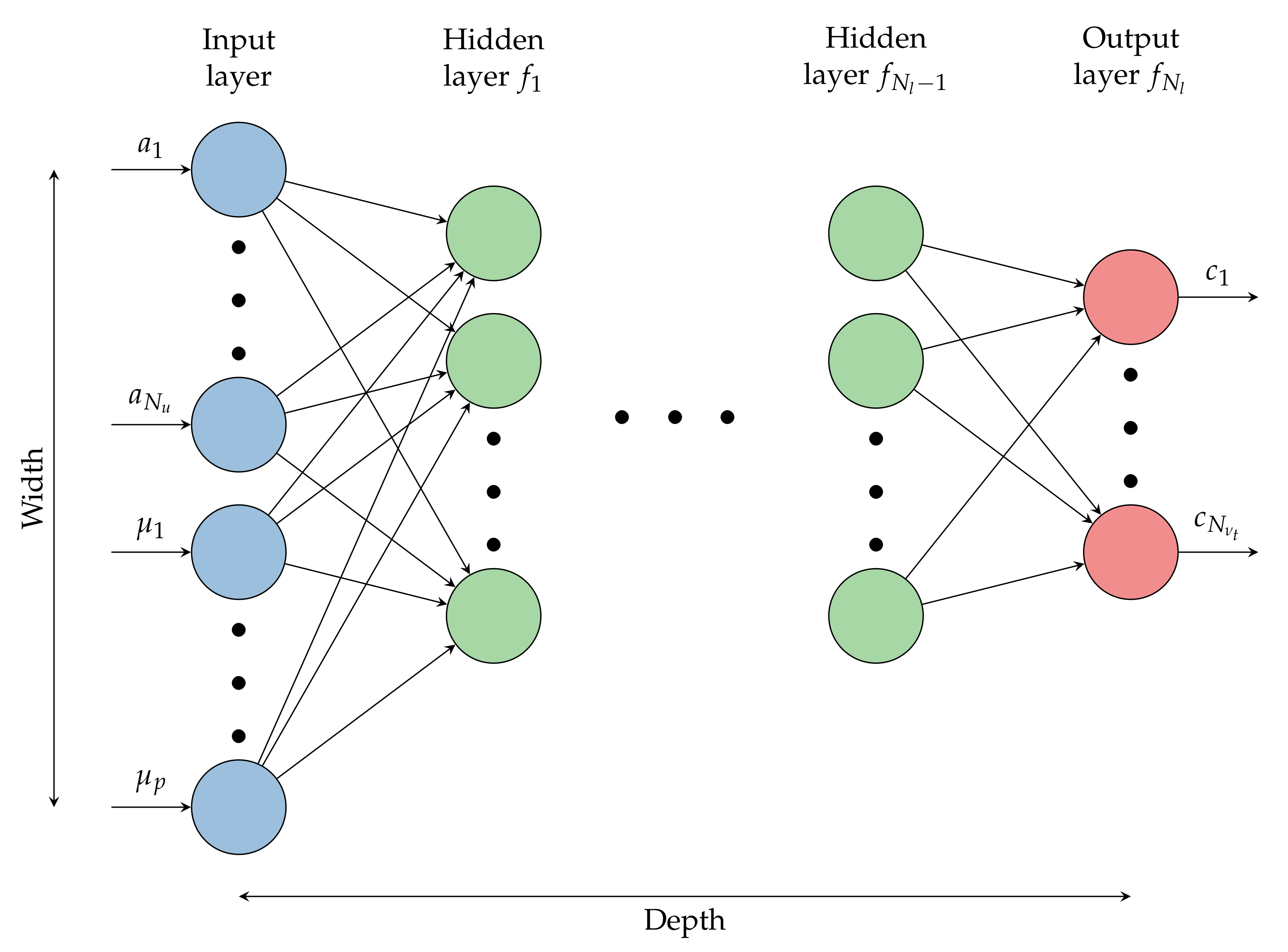
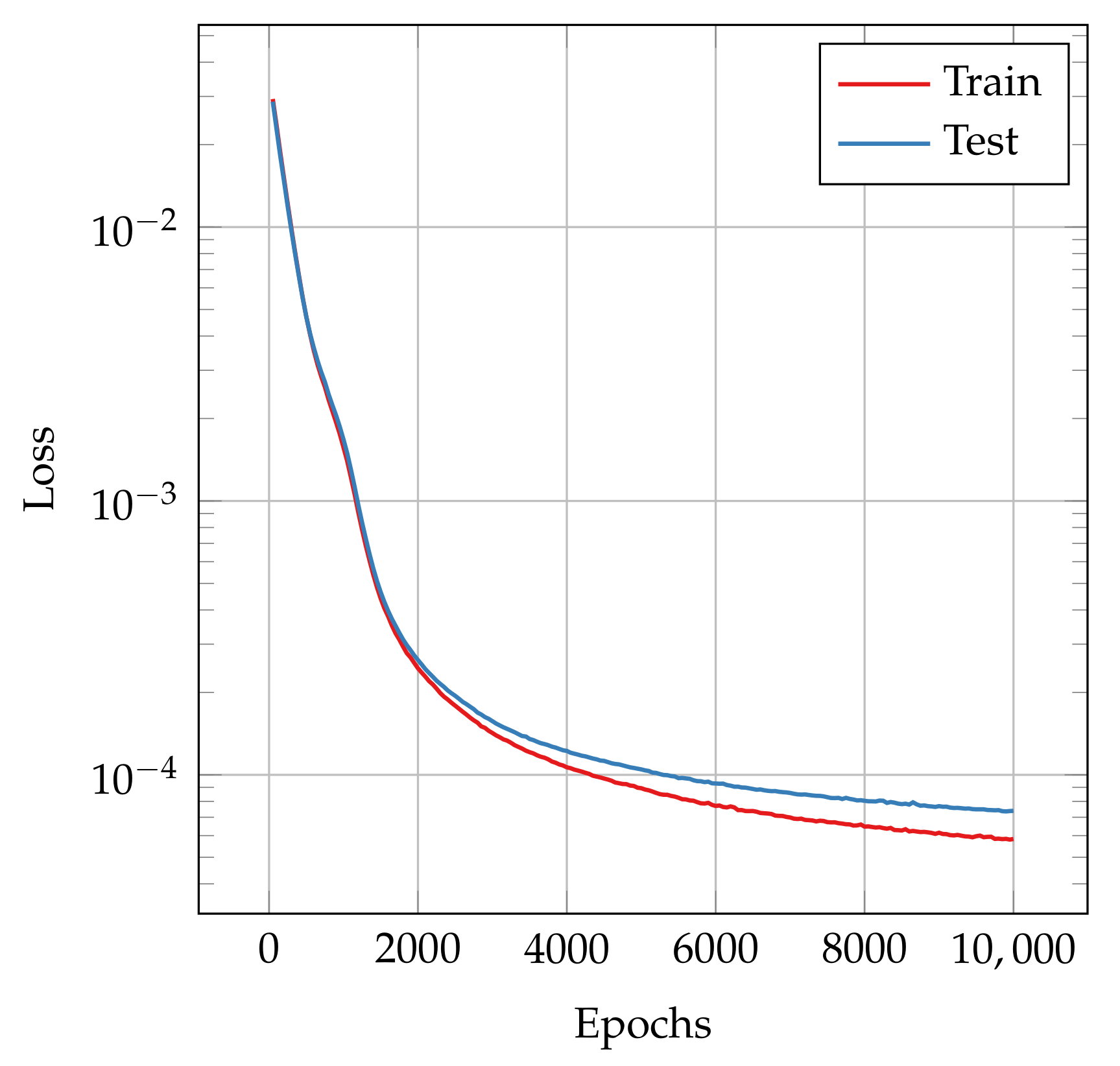
2.5. Neural Network Eddy Viscosity Evaluation
3. Results
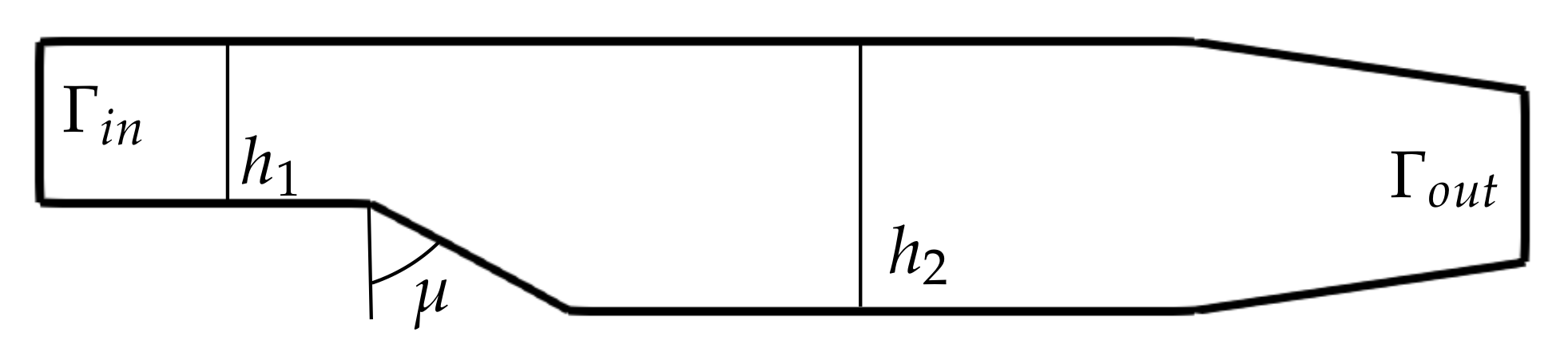
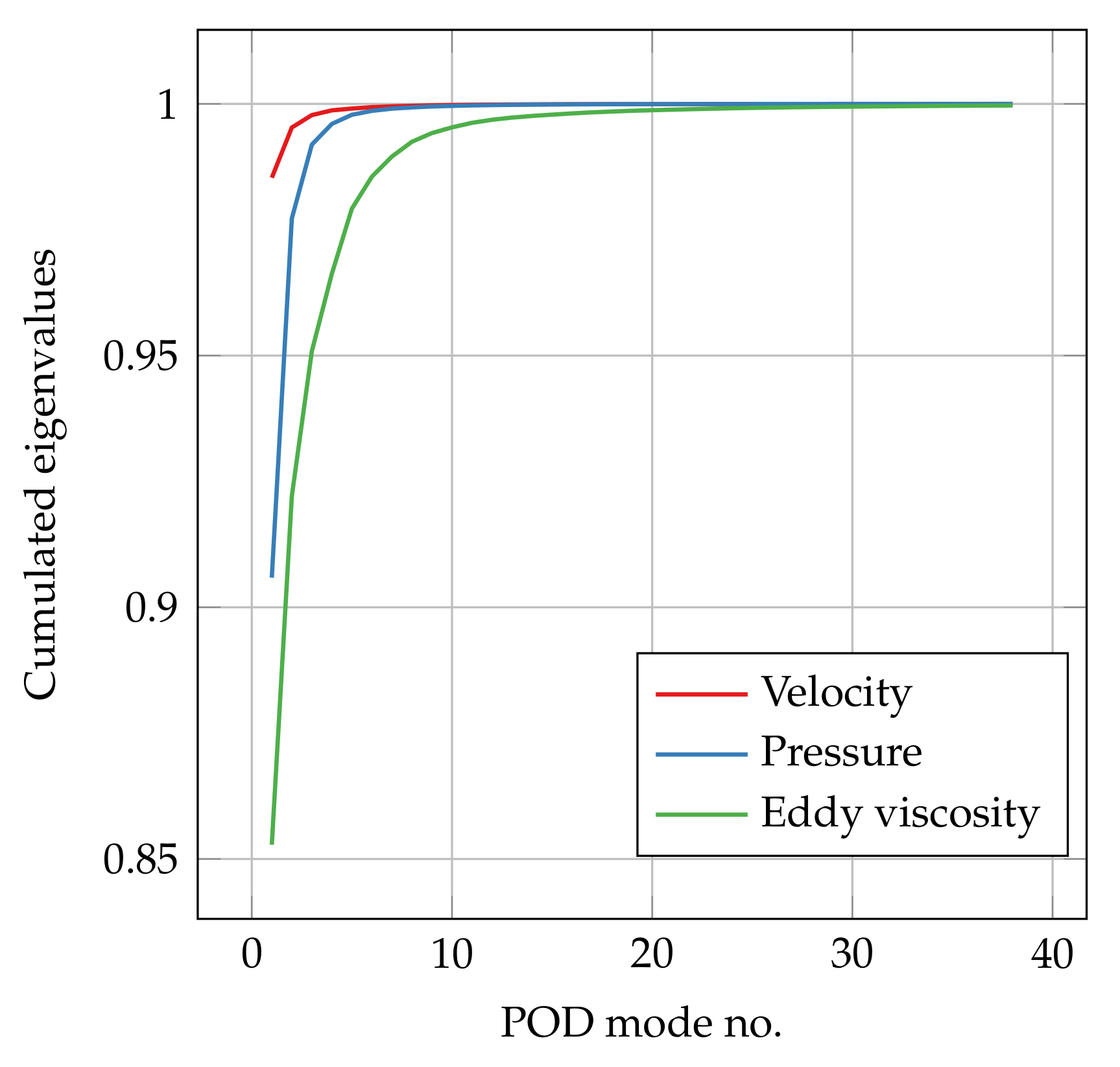
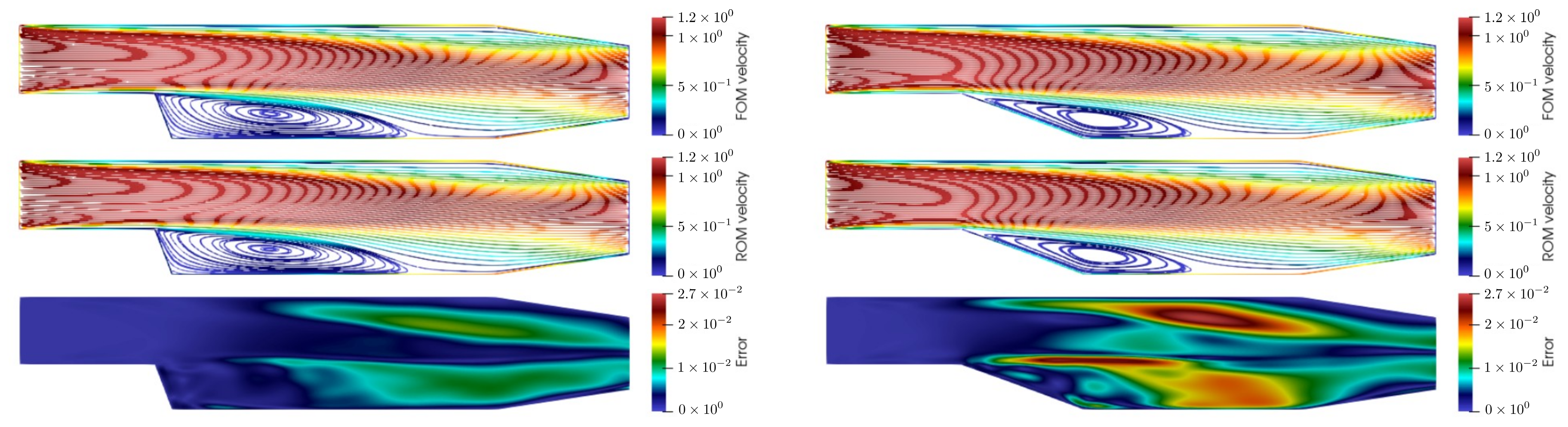
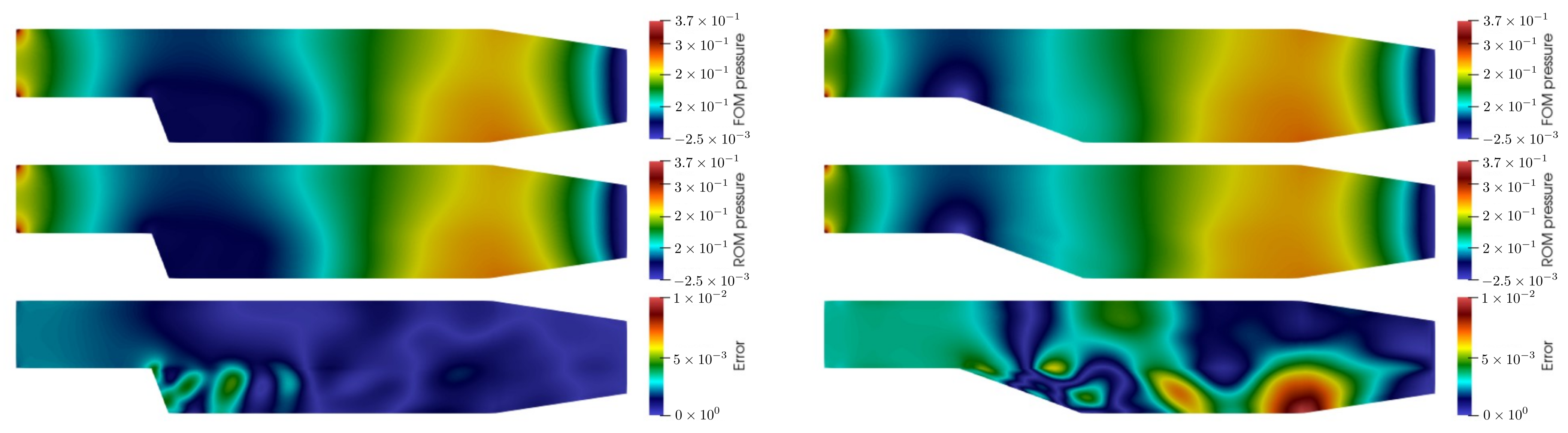
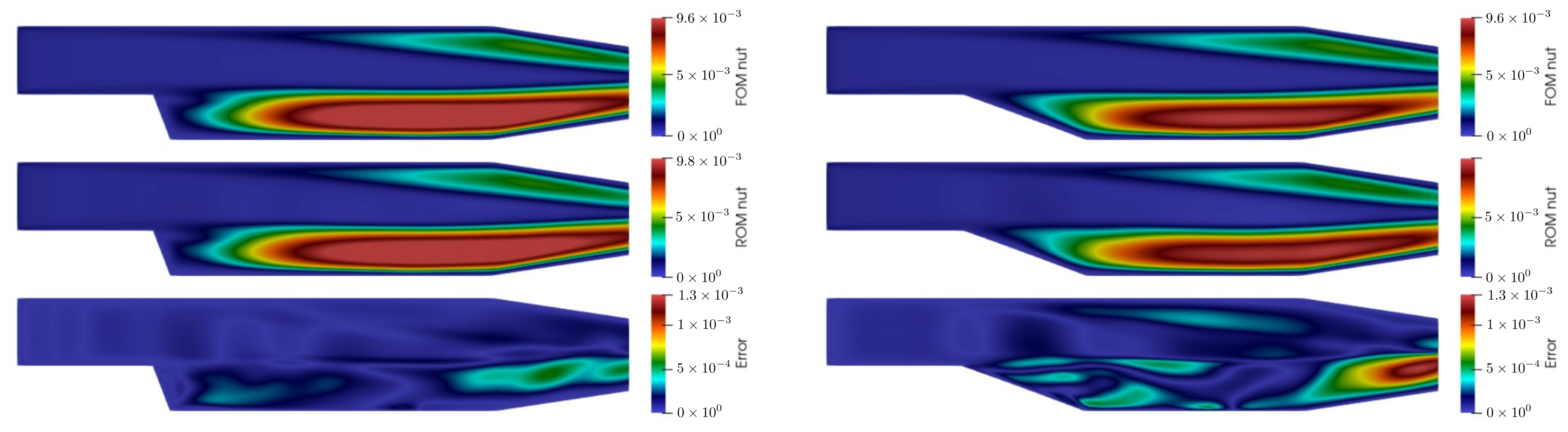
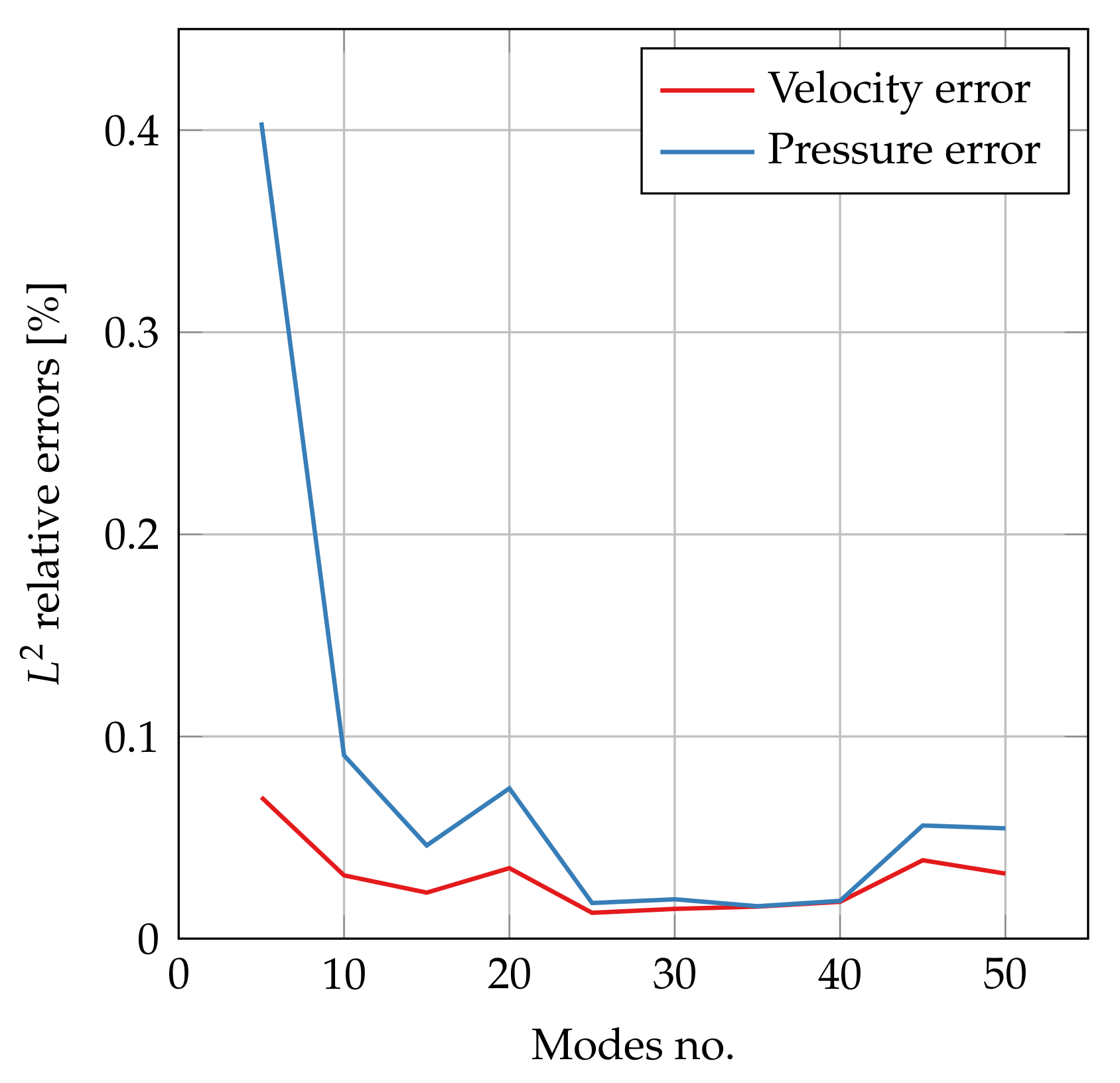
3.1. Academic Test Case
- An input layer, whose dimension is equal to the dimension of the reduced velocity, i.e., 35, plus one for the parameter;
- Two hidden layers of dimensions 256 and 64 respectively;
- An output layer of dimension 25 for the reduced eddy viscosity coefficients.
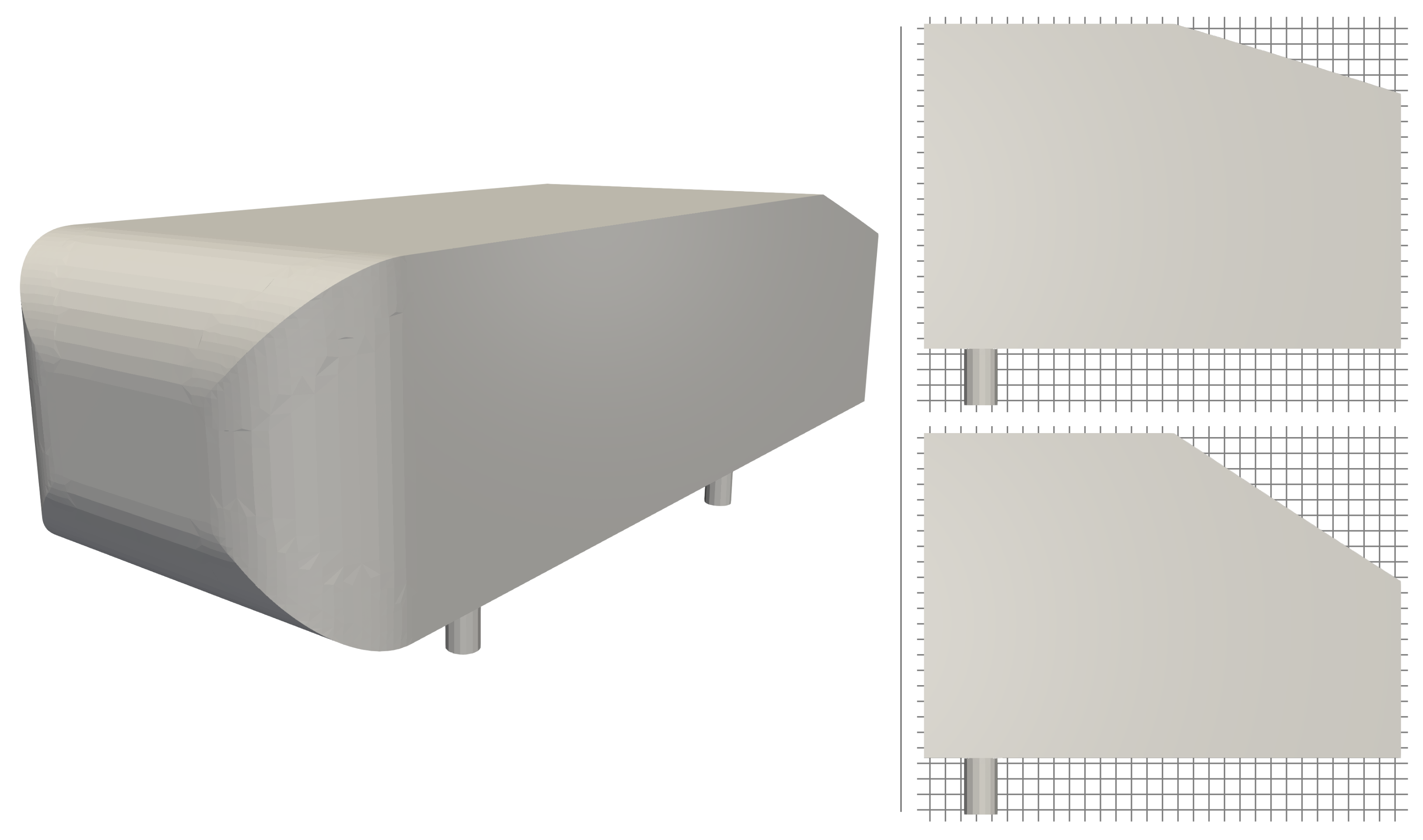
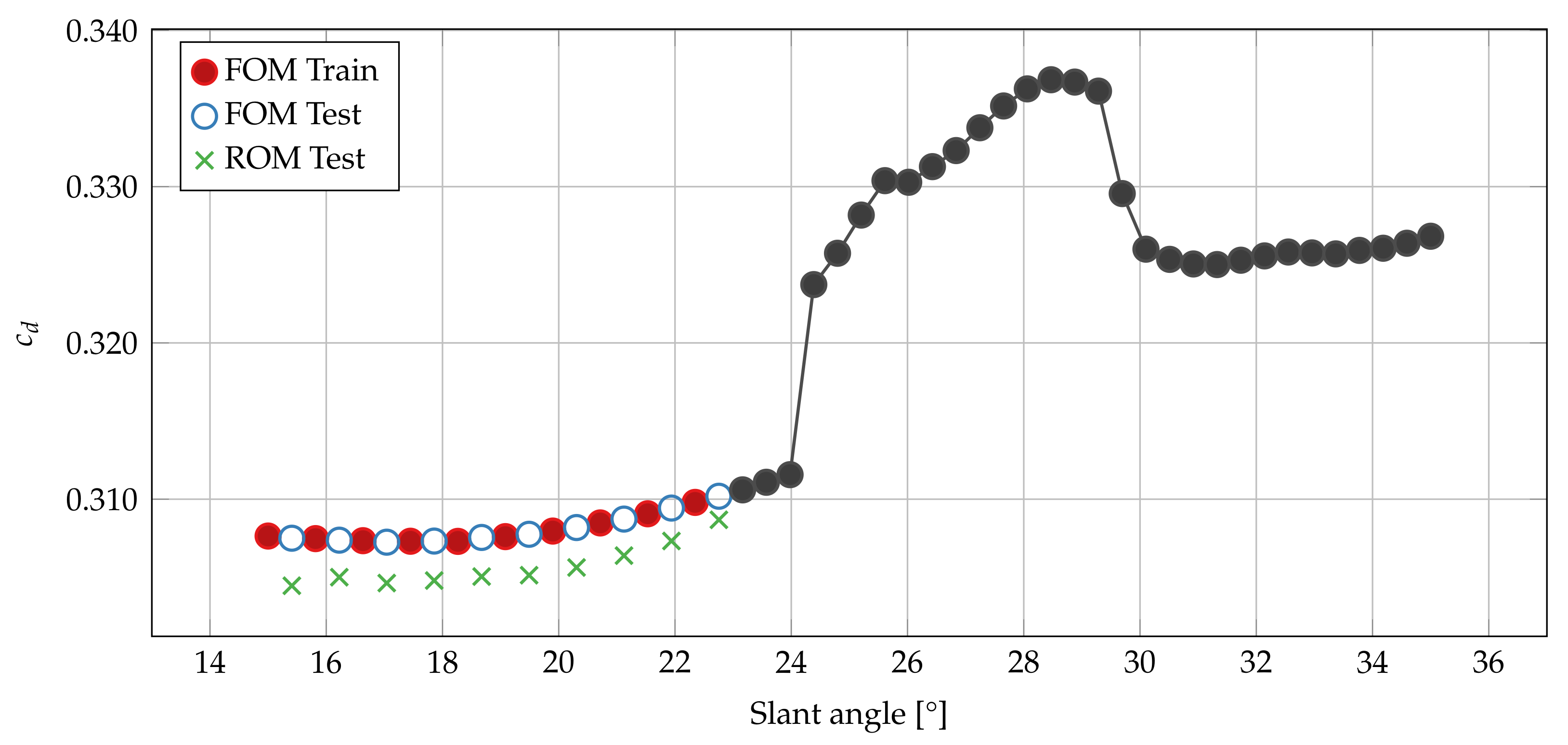
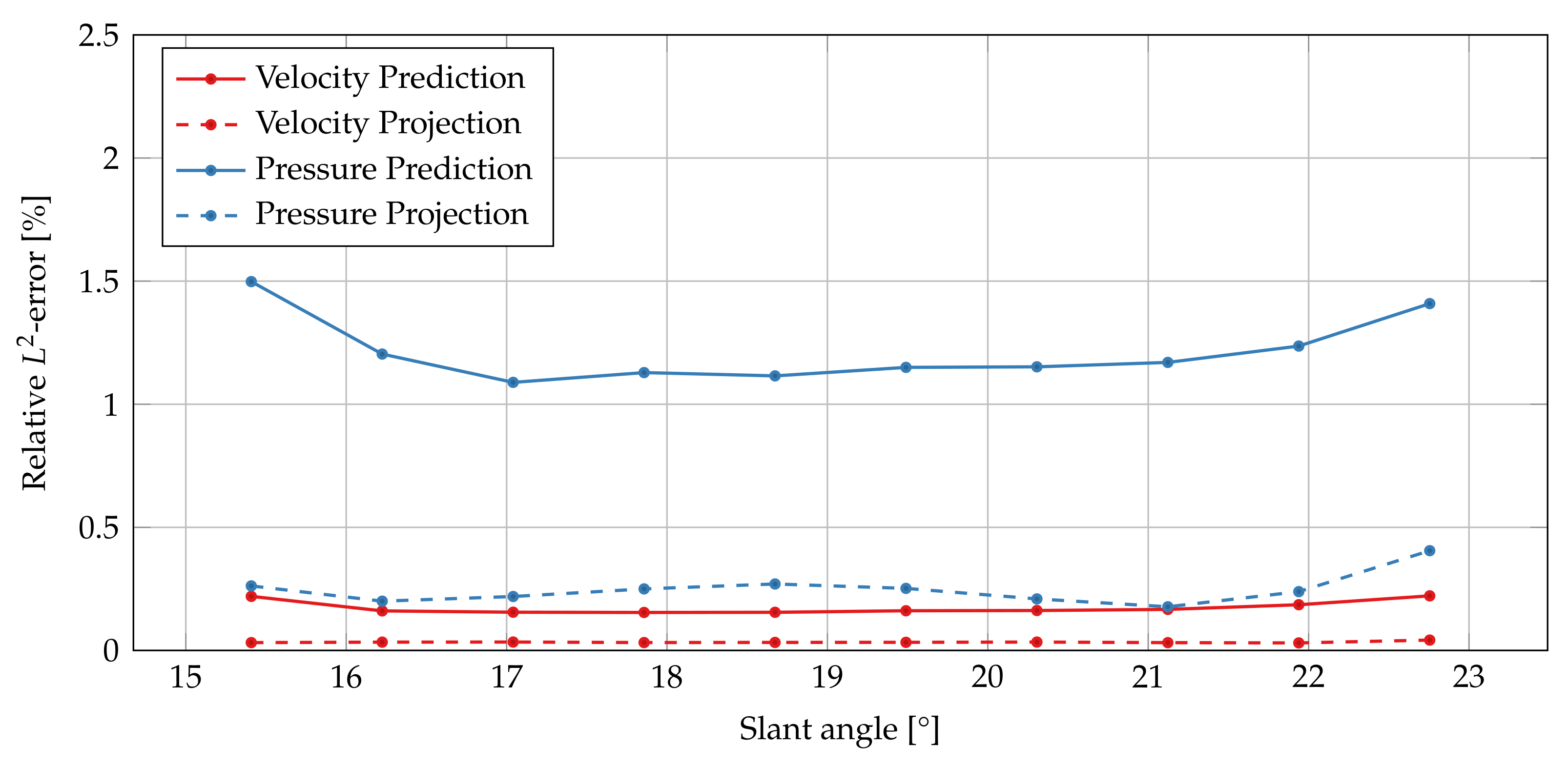
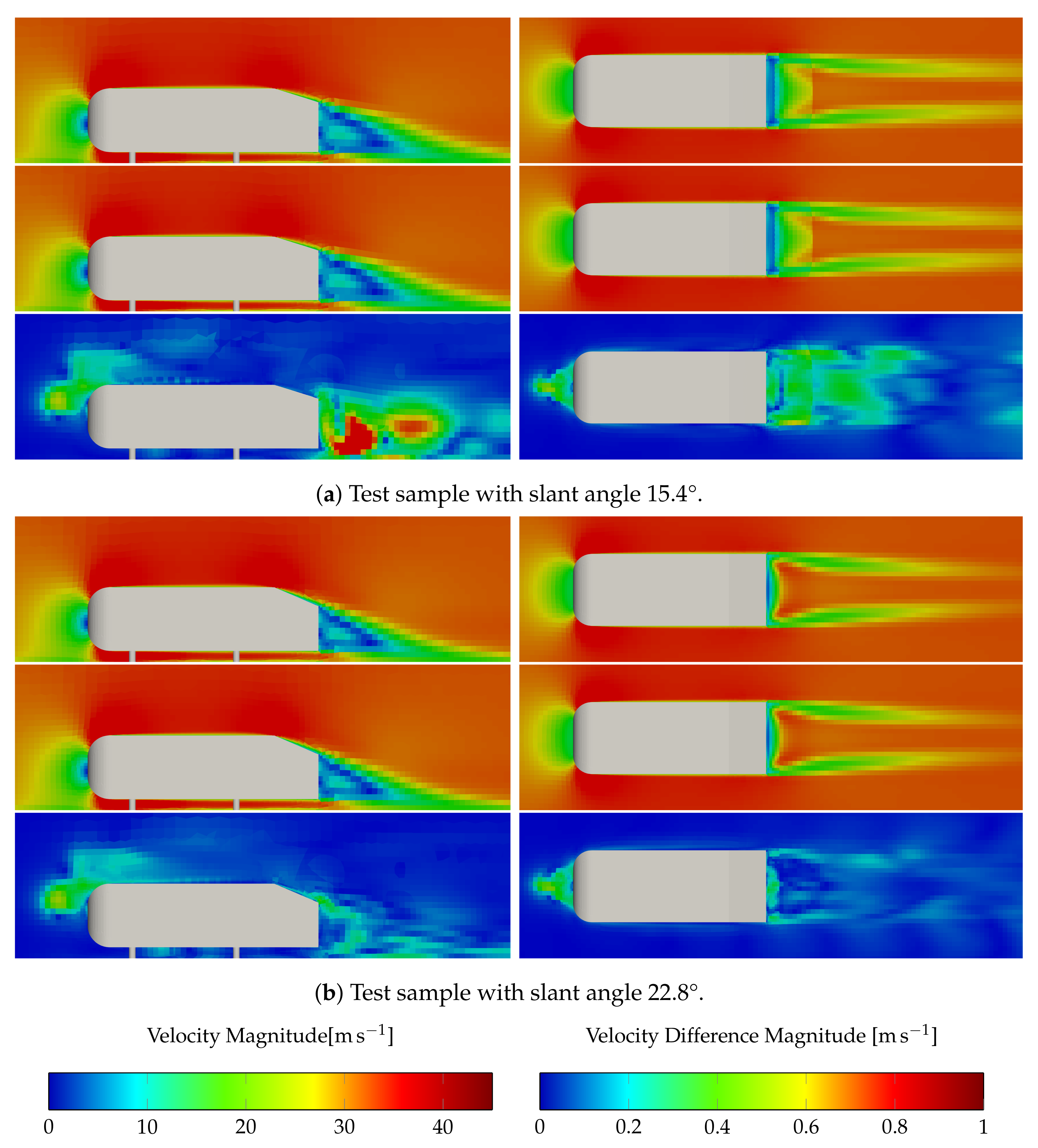
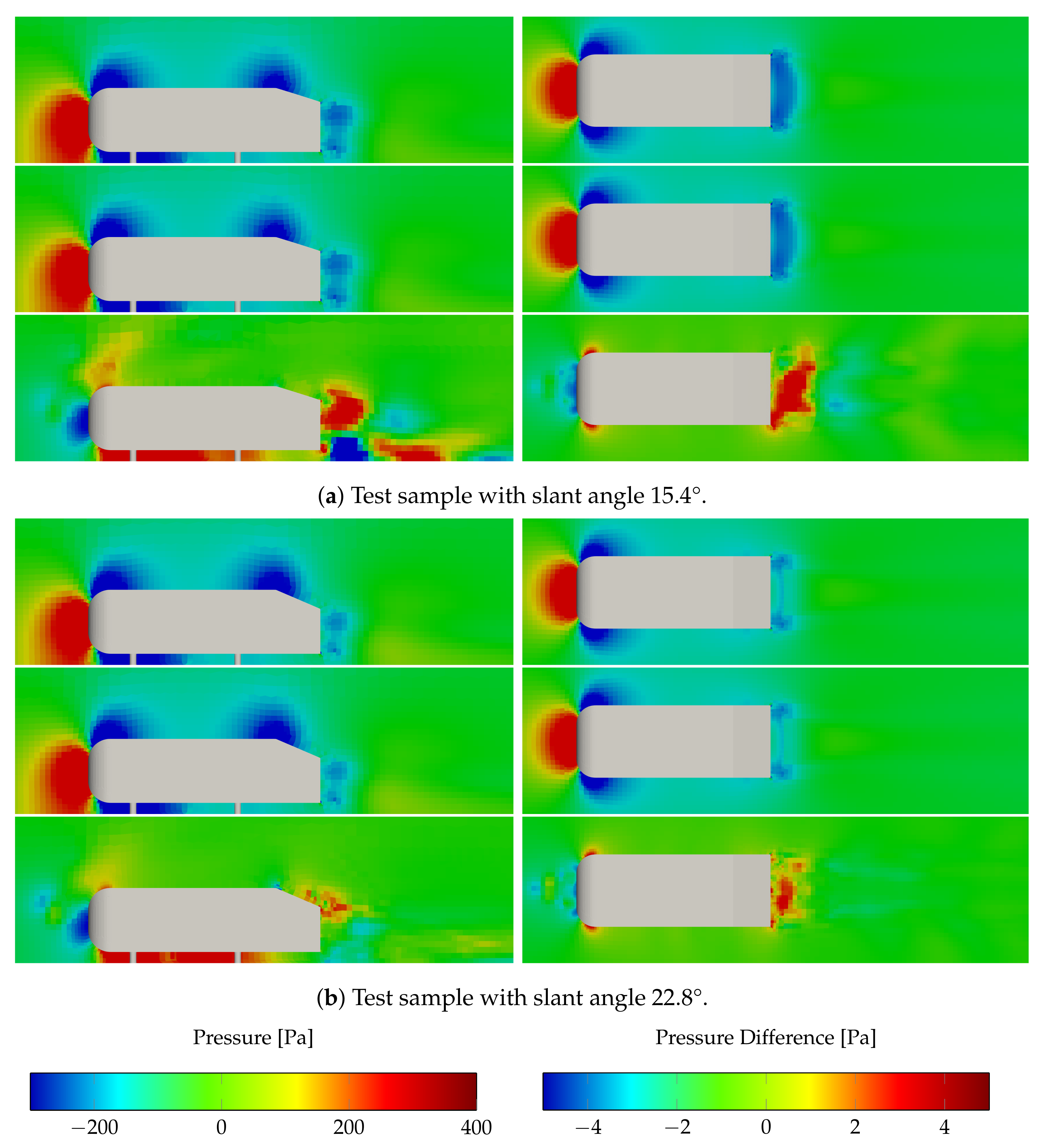
3.2. Ahmed Body
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Benner, P. Model Order Reduction: Volume 1 System and Data-Driven Methods and Algorithms; De Gruyter: Berlin, Germany, 2020. [Google Scholar] [CrossRef]
- Benner, P.; Schilders, W.; Grivet-Talocia, S.; Quarteroni, A.; Rozza, G.; Silveira, L.M. Model Order Reduction: Volume 2 Snapshot-Based Methods and Algorithms; De Gruyter: Berlin, Germany, 2020. [Google Scholar] [CrossRef]
- Iapichino, L.; Quarteroni, A.; Rozza, G.; Volkwein, S. Reduced basis method for the Stokes equations in decomposable parametrized domains using greedy optimization. In European Consortium for Mathematics in Industry; Springer: Berlin/Heidelberg, Germany, 2014; pp. 647–654. [Google Scholar]
- Salmoiraghi, F.; Scardigli, A.; Telib, H.; Rozza, G. Free-form deformation, mesh morphing and reduced-order methods: Enablers for efficient aerodynamic shape optimisation. Int. J. Comput. Fluid Dyn. 2018, 32, 233–247. [Google Scholar] [CrossRef]
- Stabile, G.; Rozza, G. Finite volume POD-Galerkin stabilised reduced order methods for the parametrised incompressible Navier–Stokes equations. Comput. Fluids 2018, 173, 273–284. [Google Scholar] [CrossRef] [Green Version]
- Tsiolakis, V.; Giacomini, M.; Sevilla, R.; Othmer, C.; Huerta, A. Nonintrusive proper generalised decomposition for parametrised incompressible flow problems in OpenFOAM. Comput. Phys. Commun. 2020, 249, 107013. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.; Carlberg, K.T. Model reduction of dynamical systems on nonlinear manifolds using deep convolutional autoencoders. J. Comput. Phys. 2020, 404, 108973. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Choi, Y.; Widemann, D.; Zohdi, T. Efficient nonlinear manifold reduced order model. arXiv 2020, arXiv:2011.07727. [Google Scholar]
- Benner, P.; Gugercin, S.; Willcox, K. A Survey of Projection-Based Model Reduction Methods for Parametric Dynamical Systems. SIAM Rev. 2015, 57, 483–531. [Google Scholar] [CrossRef]
- Brunton, S.L.; Kutz, J.N. Data-Driven Science and Engineering; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2019. [Google Scholar] [CrossRef] [Green Version]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Berselli, L.C. Mathematics of Large Eddy Simulation of Turbulent Flows; Springer: Berlin, Germany, 2006. [Google Scholar]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Canada, CA, USA, 1998; Volume 2. [Google Scholar]
- Hijazi, S.; Stabile, G.; Mola, A.; Rozza, G. Data-Driven POD–Galerkin reduced order model for turbulent flows. J. Comput. Phys. 2020, 416, 109513. [Google Scholar] [CrossRef]
- Georgaka, S.; Stabile, G.; Star, K.; Rozza, G.; Bluck, M.J. A hybrid reduced order method for modelling turbulent heat transfer problems. Comput. Fluids 2020, 208, 104615. [Google Scholar] [CrossRef]
- Stabile, G.; Zancanaro, M.; Rozza, G. Efficient Geometrical parametrization for finite-volume based reduced order methods. Int. J. Numer. Methods Eng. 2020, 121, 2655–2682. [Google Scholar] [CrossRef]
- Moukalled, F.; Mangani, L.; Darwish, M. The Finite Volume Method in Computational Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2016; Volume 113. [Google Scholar]
- Donea, J.; Huerta, A. Finite Element Methods for Flow Problems; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Busto, S.; Stabile, G.; Rozza, G.; Vázquez-Cendón, M.E. POD–Galerkin reduced order methods for combined Navier–Stokes transport equations based on a hybrid FV-FE solver. Comput. Math. Appl. 2020, 79, 256–273. [Google Scholar] [CrossRef] [Green Version]
- Jasak, H. Error Analysis and Estimation for the Finite Volume Method with Applications to Fluid Flows. Ph.D. Thesis, Imperial College London, London, UK, 1996. [Google Scholar]
- Hirsch, C. Numerical Computation of Internal and External Flows: The Fundamentals of Computational Fluid Dynamics; Butterworth-Heinemann: Oxford, UK, 2007. [Google Scholar]
- Caiazzo, A.; Iliescu, T.; John, V.; Schyschlowa, S. A numerical investigation of velocity–pressure reduced order models for incompressible flows. J. Comput. Phys. 2014, 259, 598–616. [Google Scholar] [CrossRef]
- Drohmann, M.; Haasdonk, B.; Ohlberger, M. Reduced basis method for finite volume approximation of evolution equations on parametrized geometries. In Proceedings of the ALGORITMY, Podbanske, Slovakia, 15–20 March 2009; Volume 2008, pp. 111–120. [Google Scholar]
- De Boer, A.; Van der Schoot, M.; Bijl, H. Mesh deformation based on radial basis function interpolation. Comput. Struct. 2007, 85, 784–795. [Google Scholar] [CrossRef]
- Bos, F.M.; van Oudheusden, B.W.; Bijl, H. Radial basis function based mesh deformation applied to simulation of flow around flapping wings. Comput. Fluids 2013, 79, 167–177. [Google Scholar] [CrossRef]
- Dumon, A.; Allery, C.; Ammar, A. Proper general decomposition (PGD) for the resolution of Navier–Stokes equations. J. Comput. Phys. 2011, 230, 1387–1407. [Google Scholar] [CrossRef] [Green Version]
- Chinesta, F.; Huerta, A.; Rozza, G.; Willcox, K. Model reduction methods. In Encyclopedia of Computational Mechanics, 2nd ed.; John Wiley & Sons: Chichester, UK; Hoboken, NJ, USA, 2017; pp. 1–36. [Google Scholar]
- Hesthaven, J.S.; Rozza, G.; Stamm, B. Certified Reduced Basis Methods for Parametrized Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 2016; Volume 590. [Google Scholar]
- Bergmann, M.; Bruneau, C.H.; Iollo, A. Enablers for robust POD models. J. Comput. Phys. 2009, 228, 516–538. [Google Scholar] [CrossRef] [Green Version]
- Iollo, A.; Lanteri, S.; Désidéri, J.A. Stability properties of POD–Galerkin approximations for the compressible Navier–Stokes equations. Theor. Comput. Fluid Dyn. 2000, 13, 377–396. [Google Scholar] [CrossRef] [Green Version]
- Azaïez, M.; Rebollo, T.C.; Rubino, S. A cure for instabilities due to advection-dominance in POD solution to advection-diffusion-reaction equations. J. Comput. Phys. 2021, 425, 109916. [Google Scholar] [CrossRef]
- Ballarin, F.; Manzoni, A.; Quarteroni, A.; Rozza, G. Supremizer stabilization of POD–Galerkin approximation of parametrized steady incompressible Navier–Stokes equations. Int. J. Numer. Methods Eng. 2015, 102, 1136–1161. [Google Scholar] [CrossRef]
- Stabile, G.; Hijazi, S.; Mola, A.; Lorenzi, S.; Rozza, G. Advances in reduced order modelling for CFD: Vortex shedding around a circular cylinder using a POD-Galerkin method. arXiv 2017, arXiv:1701.03424. [Google Scholar]
- Wang, Z.; Akhtar, I.; Borggaard, J.; Iliescu, T. Proper orthogonal decomposition closure models for turbulent flows: A numerical comparison. Comput. Methods Appl. Mech. Eng. 2012, 237, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Hijazi, S.; Ali, S.; Stabile, G.; Ballarin, F.; Rozza, G. The effort of increasing Reynolds number in projection-based reduced order methods: From laminar to turbulent flows. In Numerical Methods for Flows; Springer: Berlin/Heidelberg, Germany, 2020; pp. 245–264. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning Representations by Back-Propagating Errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. In Advances in Neural Information Processing Systems 32; Wallach, H., Larochelle, H., Beygelzimer, A., d’Alché-Buc, F., Fox, E., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2019; pp. 8024–8035. [Google Scholar]
- Stabile, G.; Rozza, G. ITHACA-FV-in Real Time Highly Advanced Computational Applications for Finite Volumes. Available online: http://www.mathlab.sissa.it/ithaca-fv (accessed on 31 March 2021).
- OpenFOAM Documentation Website. Available online: https://openfoam.org/ (accessed on 31 March 2021).
- Ahmed, S.; Ramm, G.; Faltin, G. Some Salient Features of The Time-Averaged Ground Vehicle Wake; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1984. [Google Scholar] [CrossRef]
- Lienhart, H.; Stoots, C.; Becker, S. Flow and Turbulence Structures in the Wake of a Simplified Car Model (Ahmed Model). Notes Numer. Fluid Mech. 2002, 77, 323–330. [Google Scholar] [CrossRef]
- Islam, M.; Decker, F.; De Villiers, E.; Jackson, A.; Gines, J.; Grahs, T.; Gitt-Gehrke, A.; Font, J. Application of Detached-Eddy Simulation for Automotive Aerodynamics Development. In SAE World Congress & Exhibition; SAE International: Warrendale, PA, USA, 2009. [Google Scholar] [CrossRef] [Green Version]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zancanaro, M.; Mrosek, M.; Stabile, G.; Othmer, C.; Rozza, G. Hybrid Neural Network Reduced Order Modelling for Turbulent Flows with Geometric Parameters. Fluids 2021, 6, 296. https://doi.org/10.3390/fluids6080296
Zancanaro M, Mrosek M, Stabile G, Othmer C, Rozza G. Hybrid Neural Network Reduced Order Modelling for Turbulent Flows with Geometric Parameters. Fluids. 2021; 6(8):296. https://doi.org/10.3390/fluids6080296
Chicago/Turabian StyleZancanaro, Matteo, Markus Mrosek, Giovanni Stabile, Carsten Othmer, and Gianluigi Rozza. 2021. "Hybrid Neural Network Reduced Order Modelling for Turbulent Flows with Geometric Parameters" Fluids 6, no. 8: 296. https://doi.org/10.3390/fluids6080296
APA StyleZancanaro, M., Mrosek, M., Stabile, G., Othmer, C., & Rozza, G. (2021). Hybrid Neural Network Reduced Order Modelling for Turbulent Flows with Geometric Parameters. Fluids, 6(8), 296. https://doi.org/10.3390/fluids6080296